星載激光通信終端軸承預緊力及加載結構研究
2015-12-07 06:56:36鄭和鵬張立中張家齊
長春理工大學學報(自然科學版) 2015年4期
關鍵詞:變形
鄭和鵬,張立中,2,張家齊,2
(1.長春理工大學 機電工程學院,長春 130022;2.長春理工大學 空地激光通信國防重點學科實驗室,長春 130022)
星載激光通信終端是通過方位、俯仰機構組成的周掃望遠鏡式轉臺。該轉臺用于空間遠距離激光通信,適合在不同的軌道范圍衛星之間的高帶寬數據傳輸。其功能實現為通過火箭發射,轉臺搭載衛星入軌,將光端機天線負載鎖定在停泊位置,以承受發射中的振動、沖擊、噪音等載荷。入軌后,釋放光端機天線負載,當兩顆衛星之間開始通訊時,波束通過來自衛星的慣性導航數據搜索目標終端的光端機,實現目標空間捕獲。最終,依據跟蹤指令,驅動光端機轉動,實現對目標的自動跟蹤,并將轉角位置信息進行反饋,完成對目標的實時跟蹤通信。其中發射及在軌運行過程中,轉臺軸承系統為了防止軸承間隙以及克服發射過程中高重力加速度以及沖擊振動,發射時會提供極其高的預載荷和剛度[1]。在軌運行時降低預緊力以減少平均摩擦,扭矩噪音以及縮小軸承接觸應力。
1 軸承預緊力分析
軸承預緊就是在安裝時采用某種方法在軸承中產生并保持一定軸向力,以消除軸承的內部游隙,并在滾動體內外接觸處產生初變形。通過對軸承施加預緊載荷,提高軸承滾珠負載的均勻性、旋轉精度、系統剛度以及減少振動和噪聲[2-5]。然而,軸承預緊力過大會使摩擦力矩徒增導致軸承發熱,引起主軸溫升并導致熱變形增大,且容易出現“死點”,降低軸承使用壽命;預緊力太小又不能充分發揮軸承系統的潛能,且軸向剛度小,在較大的角速度作用下容易發生卸載,出現間隙。
星載激光通信終端-周掃式二維轉臺采用背靠背式安裝的角接觸球軸承71832AC,其基本幾何參數如表1所示。
安裝方式采用背靠背定壓預緊方式,即軸承在使用過程中保持其軸向預緊載荷不變,如圖1所示。
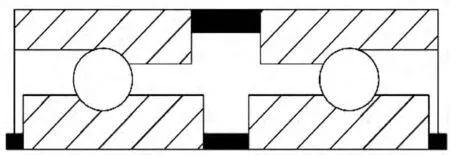
圖1 背靠背式定壓預緊
周掃轉臺采用可調節的軸承預加載結構實現預緊力大小的調節,突破了傳統的固定式預緊力在兩種工況下不滿足的難題。即發射時要提供高預載荷,保證能支撐外部質量的高剛度以及所需的基頻。在軌運行時,采用低預緊載荷以降低平均摩擦,扭矩噪音以及軸承接觸應力。故軸承預緊力大小[4-6]的選擇對轉臺具有十分重要的意義。
角接觸球軸承在軸承預緊力作用下,接觸角由α0變為α,即:

其中:c為接觸變形系數;fm為內外圈軌道曲率半徑的平均值;為軸承滾珠直徑;Z為滾珠數量;Fp為軸向預緊力。
在軸向預緊力作用下,采用極限理論導出軸向剛度Ka,假設軸承只有軸向變形δ,徑向變形η為零,則軸承只受軸向力,此時軸向變形為:

軸向剛度Ka為:

同理徑向變形η:

徑向剛度Kr:

軸承在聯合載荷作用下,令軸承內外圈相對平移δ1和δ2,則在承受負荷最大的滾動體與套圈接觸處,沿接觸線法線方向的總彈性變形量為:

對δ1求偏導,則軸向剛度Ka為:

其中推導后計算公式為:

將軸承相關參數分別帶入,并且給出在不同預緊力下軸承的軸向剛度與接觸角,如表2所示。
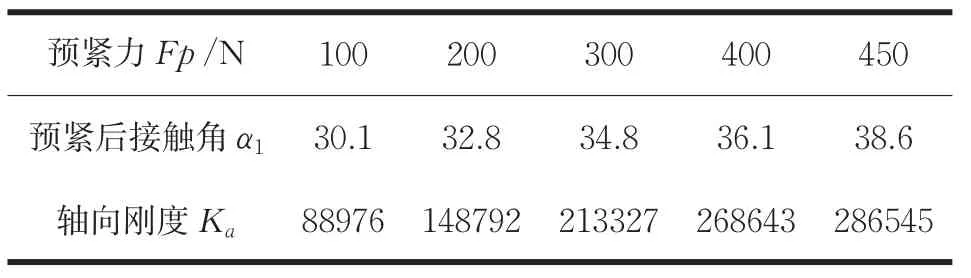
表2 軸向剛度與接觸角
通過不同預緊力下,軸承剛度的數據表明隨著預緊力的增大,軸系的剛度呈上升趨勢。
2 模型建立及仿真分析
滾動軸承由內圈、外圈、滾動體及保持架組成,本文采用接觸有限元法[4,5],對實驗軸承進行建模,研究軸承在不同預緊力下軸承剛度的變化規律。
71832ACD/HCP4軸承,其材料為GCr15,彈性模量為207GPa,泊松比為0.3。本文采用彈簧單元combin14來模擬軸承剛度,自定義節點的徑向位置,將軸承等效為4個軸向分布和徑向分布的彈簧單元。由于軸承嵌在軸承座中,故約束外表面所有自由度,內圈接觸面施加軸向約束,其中電機、旋轉變壓器等作為軸的附加質量等效到所在單元的節點上,如圖2所示。主軸材料為2Cr13。采用四面體網格劃分,主軸軸向固定約束,徑向有自由度。軸承安裝后的預負荷,對于71832軸承,預負荷等級預選A時,即Gc為 A=330N。軸承系數 f=1.42,修正系數 f1=0.97,f2=1。故安裝后軸承組預負荷為:

表1 軸承基本參數
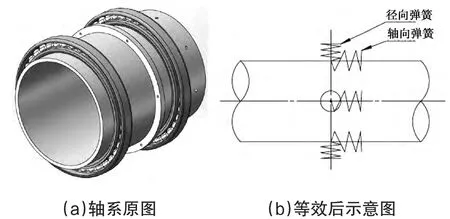
圖2 軸系原圖和等效后示意圖

模態分析采用Block Lanczos法。其軸系有限元模型如圖3所示。
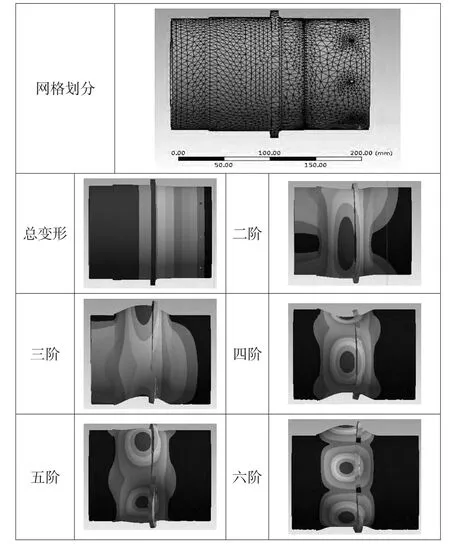
圖3 軸系模態分析
不同預緊力下軸承軸向與徑向剛度不同,從而軸系的固有頻率發生變化。本文對等效軸承施加不同的彈簧剛度,從而得到不同預緊力下軸系的固有頻率。如圖4所示,軸系固有頻率隨預緊力的增大而增大,從而可得出結論:預緊力的增大可以在一定范圍內提高軸系的固有頻率。
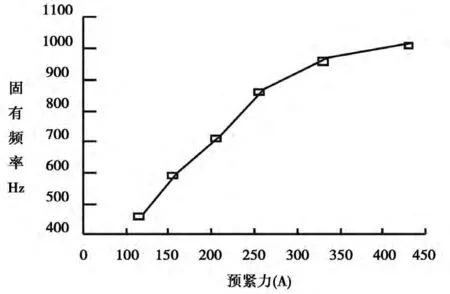
圖4 固有頻率與預緊力關系
3 軸承預加載結構的應用
軸承預加載結構[7-10]可以被認為是一個包含由成對的薄的,類似刀片的彎曲支桿連接的三個同軸環的整體鈦結構組成的軸承殼,如圖5所示。

圖5 預緊力調節結構
這些環由“懸臂梁”連接,用于提供發射時所需的結構剛度特性,上推力環、下推力環與軸承連接進行預加載,而中間的同步環可以旋轉一個小角度,從而上環相對下環會產生柔性支桿的變形和軸向位移,因此改變預緊力的同時會保持軸承的平面度。其中柔性支桿的對數可以修改以適應不同應用的載荷需求。本文采用24對柔性支桿。對于發射時高預緊力狀態,柔性支桿稍微偏離了理論制造的完全直的“上死點”位置,如圖6所示。為了驅動設備,切向力會作用到同步環上而旋轉過直支桿“上死點”位置,首先到低負荷平衡點,在這點上軸承系統的剩余預緊力是由彎曲的柔性支桿彈性力平衡的。進一步的驅動力使同步環移動到最終低負荷狀態,即對應柔性支桿應力的本身尺寸狀態。其所給驅動力與軸向位移關系如圖7所示。本轉臺發射時使用預負荷等級為C,其中Gc=2000N,軸承系數 f=1.42,修正系數 f1=0.97,f2=1.15;故安裝后軸承組預負荷為:
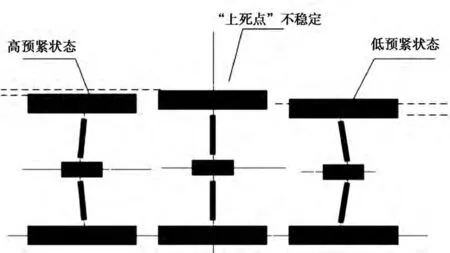
圖6 預載荷狀態

圖7 預緊力大小與軸向位移曲線關系

在軌運行時軸承組預負荷等級為A,軸承組預負荷為454.5N,所對應的軸向位移范圍為25~35μm,可以隨工況進行調節。
對于此雙穩態軸承預加載結構,最好的驅動路徑是由形狀記憶合金驅動。因為它既提供高機械效率,并且具有簡單、功能可靠性。也可以選擇微型電機驅動、壓力驅動、電化學驅動、熱驅動等。本文軸承預加載結構從高到低預載荷驅動是通過雙向形狀記憶合金(SMA)驅動器獲得的,它涉及同步環與形狀記憶合金接觸。驅動方式為SMA驅動器受熱伸長推動中間同步環轉動,當電源關閉時,SMA接觸返回到其原始位置并使同步環自由,從而達到兩種工況要求。
4 結論
通過對軸系剛度以及固有頻率的分析,軸承主動預加載系統允許球軸承預載荷按要求變化,可使軸承壽命、平均扭矩、功耗在數量級上提高,并改善了轉臺的指向精度并降低了抖動量。主要用于高精密光機裝置,對于一系列軸承尺寸、預緊力范圍及應用也是可擴展和定制的。
[1]王紅軍,鄭軍,趙川.精密高速電主軸動力學特性及軸承剛度軟化分析[J].航空制造技術,2014,2(24):81-85.
[2]芮紅峰,胡小秋,郭丹鳳.角接觸球軸承動態特性參數測試方法[J].振動與沖擊,2013,32(8):88-90.
[3]馬天兵.基于ANSYS的滾動軸承有限元分析[J].煤礦機械,2004,25(2):66-68.
[4]陳署泉,肖曙紅,楊士鐵.角接觸球軸承的靜態接觸分析[J].軸承,2009,36(11):4-7.
[5]李頌華,馮明昊.關于軸承預緊力對軸系性能影響的仿真分析[J].2014,27(3):105-108.
[6]岡本純三,黃志強.球軸承的設計計算[M].北京:機械工業出版社,2003.
[7]Mussett D.Optical terminal–coarse pointing assembly(CPA)[J].ESA,2003,10(5):81-88.
[8]Lewis S D,Humphries M E.An introduction to bearing active preload systems-technology and performance benefits[J].ESA,2005,11(5):261-269.
[9]Lewis S D,Humphries M E.Development,prequalification and application ofan active bearing preload system[J].NASA,2006,38(2):133-140.
[10]Lewis S D.Development of an adjustable bearing preload enabled–optical terminal[J].ESA,2009,13(6):23-25.
猜你喜歡
智慧少年·故事叮當(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學版(2020年11期)2020-02-01 06:26:58
作文周刊·小學二年級版(2018年29期)2018-11-26 11:20:28
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數學小靈通·3-4年級(2017年10期)2017-11-08 08:42:59
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36