基于模糊神經網絡的ETV復雜故障診斷研究
2015-12-19 08:27:28邱建東蘭州交通大學機電技術研究所甘肅蘭州730070
物流科技 2015年3期
邱建東 (蘭州交通大學 機電技術研究所,甘肅 蘭州730070)
QIU Jian-dong (Mechatronic T & R Institute, Lanzhou Jiaotong University, Lanzhou 730070, China)
0 引 言
航空貨運伴隨經濟全球化進程和日益激烈的企業競爭得到了飛速發展。航空貨運是高附加值高速高效的貨運手段,在貨物運輸總時間中,機場貨運站貨物處理時間占據了近80%,因此貨運站工作效率高低直接影響到航空貨運的效率。貨運站中物流裝備的工作效率及平均無故障運行時間是保障整體效率的關鍵因素之一。
升降式轉運車(Elevating Transfer Vehicle, ETV) 是大型機場貨運站內結構剛度、制作精度、安全性要求最高、貨物存取動作最多、控制策略最復雜的大型機電設備,是一個大型航空貨運站貨運能力的標志。作為控制性核心設備,在ETV 發生較復雜故障時,能夠快速診斷并處理,就顯得尤為重要。
ETV 的基本結構如圖1 所示,由于ETV 本身的復雜性,它的復雜性故障原因與征兆之間呈現出較復雜的邏輯關聯關系,呈現出“多因一果”、“多因多果”、“一因多果”等特點,很難用單一的判別函數進行故障分離和解析。因此,考慮使用神經網絡+模糊推理系統融合的模式進行診斷判別研究。
1 模糊神經網絡
模糊推理(Fuzzy System, FS) 技術和神經網絡(Neural Network, NN) 能夠很好的融合,源于兩者的相似性。兩者均是具有并行處理能力的非線性輸入/輸出系統。FS 和NN 融合,將符號處理(物理符號機制) 和非符號處理(聯絡機制) 進行了有效關聯,將不精確處理與精確處理做了很好的互補。因此,融合有助于提高模糊推理系統的自適應能力,同時提高了NN 的全局性能與可觀測性。這里選用Mamdani 模型FS 和BP-NN 進行融合。
Mamdani 模型選用極大—乘積復合推理范式,規則形式一般為:
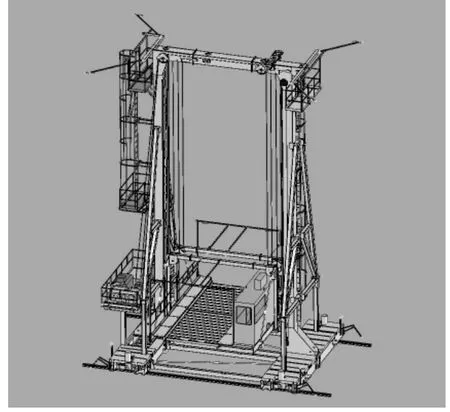
圖1 機場升降式轉運車

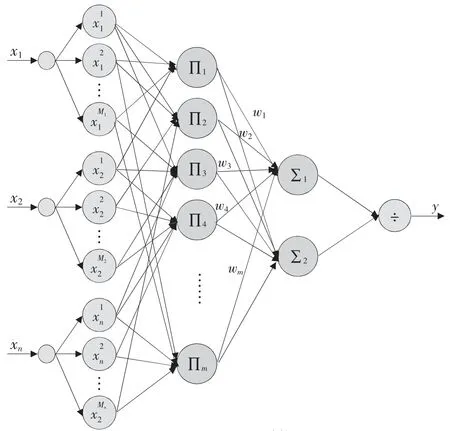
圖2 BPNN-FS 結構
堆垛機故障診斷屬于多輸入—多輸出(MIMO) 的模糊推理系統,為研究方便,可以將其分解成多個多輸入—單輸出(MISO) 的系統,給出系統結構如圖2 所示。
該系統分成5 層,第一層為輸入層,第二層對應模糊系統條件(IF),輸出輸入變量對應模糊集的隸屬度函數,在本系統中,隸屬度生成函數使用高斯函數:

第三層是推理層,輸出對應每條規則的適應度,πi節點是乘法器。輸出為所有輸入的乘積,設為αi,αi的計算如(5) 所示:

由圖2 結構看,該神經模糊系統本質和多層前饋神經網絡是一致的,可以參考BP 神經網絡的誤差反傳算法來調整參數。這里面主要需要調整的參數為隸屬度函數的寬度和中心值此外還有第四層輸出規則置信度wi。參數調整公式有:
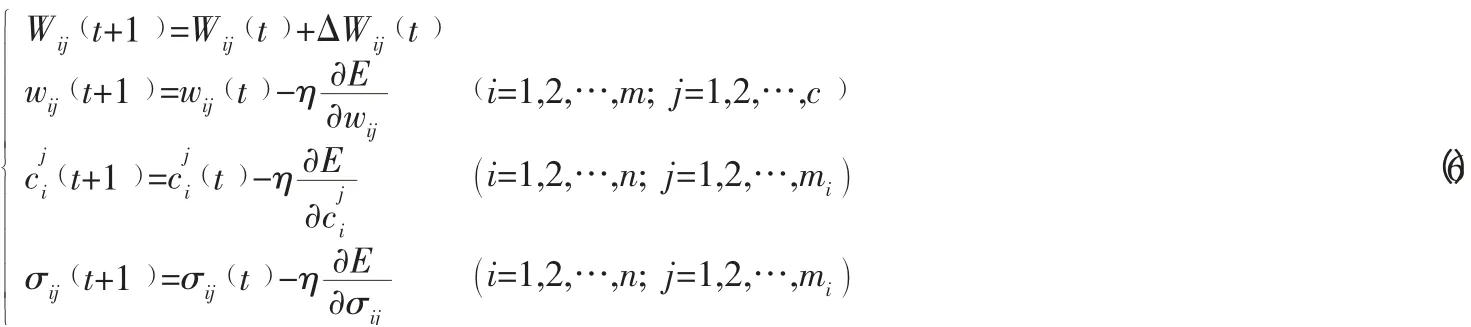
式中,η 為學習率,一般取大于零的數。c為輸出的數據個數,mi是ui的模糊分割數。
2 故障征兆采集與模糊處理
根據現場試驗和專家維修經驗,通過技術資料整理歸納,做出故障征兆信息的隸屬度分布。

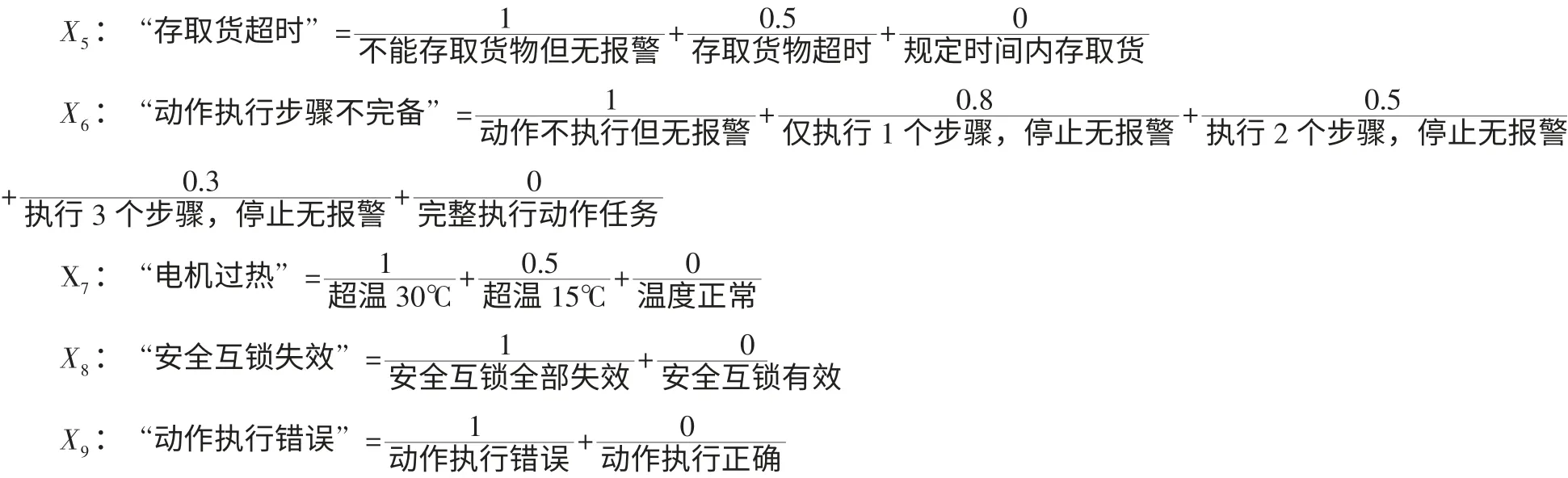
對復雜故障,主要界定一級故障原因。堆垛機復雜故障一級原因主要有:y1檢測控制光電未報警失效;y2通信故障;y3軟件故障;y4變頻器故障;y5電機減速器滾筒故障;y6鋼結構變形故障。同時確定故障的模糊范疇描述,如表1 所示:

表1 故障的模糊描述
根據設計人員、維修人員、工程專家及現場歸納,做出如表2 所示的故障征兆與故障原因對應關系的模糊規則庫,同時該庫作為神經模糊系統網絡的訓練樣本。
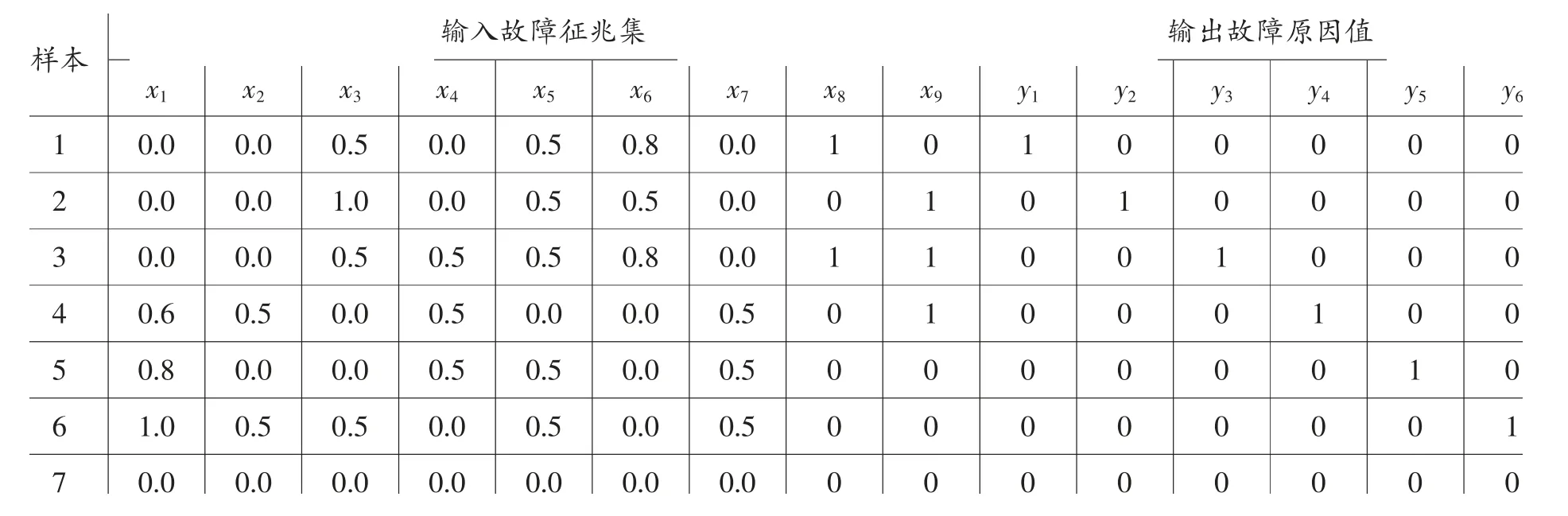
表2 堆垛機故障征兆與原因對應關系
3 神經網絡訓練與故障診斷
神經模糊系統結構模型本質是BP 神經網絡,因此也存在著一些BP 神經網絡固有的缺陷,例如容易陷入局部極值、收斂速度慢等。此外,隸屬度函數的參數a和以及規則權重值wi等都嚴重依賴專家經驗,而BP 網絡訓練時對初始權值和閾值非常敏感,容易造成優化失敗。采用粒子群算法優化BP 神經網絡是目前比較通用的一種做法,它是利用粒子群算法經驗參數依賴度低、全局搜索能力強、并行計算等優點來提高BP 權值訓練速度,避免陷入局部極小比,提升其推廣概括能力。
本文采用的粒子群優化BPNN 的方式是:在確定神經網絡結構的基礎上,將BP 網絡的權值按統一的次序排列為一個向量的元素,將該向量作為粒子群中的一個粒子,然后將BP 神經網絡正向傳播過程得到的誤差作為PSO 算法的適應度函數,由BP 神經網絡和PSO 算法的循環迭代來找到最佳的BP 網絡的權值。
采用PSO 優化方法,其中粒子編碼長度為(5+5+3+5+3+5+3+2+2)×2+7×6=108。設定訓練目標均方誤差目標為0.001,最大循環次數為10 000 次。PSO 的參數設定為:c1,c2分別設為2.5、1,慣性權重w采用由shi 提出的線性遞減權重策略,即:

式中:wmax=0.9,wmin=0.4,t為當前迭代次數;最大限制速度Vmax。算法優化網絡訓練情況如圖3 所示。網絡的仿真輸出如表3 所示,采用PSO 優化方法,經過130 次左右的訓練,誤差滿足要求,網絡訓練成功。
系統輸出故障原型的隸屬度向量y,通過判斷分析y來確定故障原因。故障原因分析可以采用最大隸屬度原則,即將輸出層中最大隸屬度節點作為故障原因,這種方法雖然可行,但是和實際現場是有差異的。作為一臺機電一體化設備,堆垛機融合了計算機技術、通信技術、電子技術、控制理論等多門學科理論與技術,其復雜故障,往往不是一個單一的原因造成的,往往是由主要原因和輔助原因共同作用產生的結果,這就是“一果多因”的情況。因此需要根據輸出結果,綜合表1 設定的故障模糊輸出隸屬度,來綜合判定系統的輸出代表的故障類型。
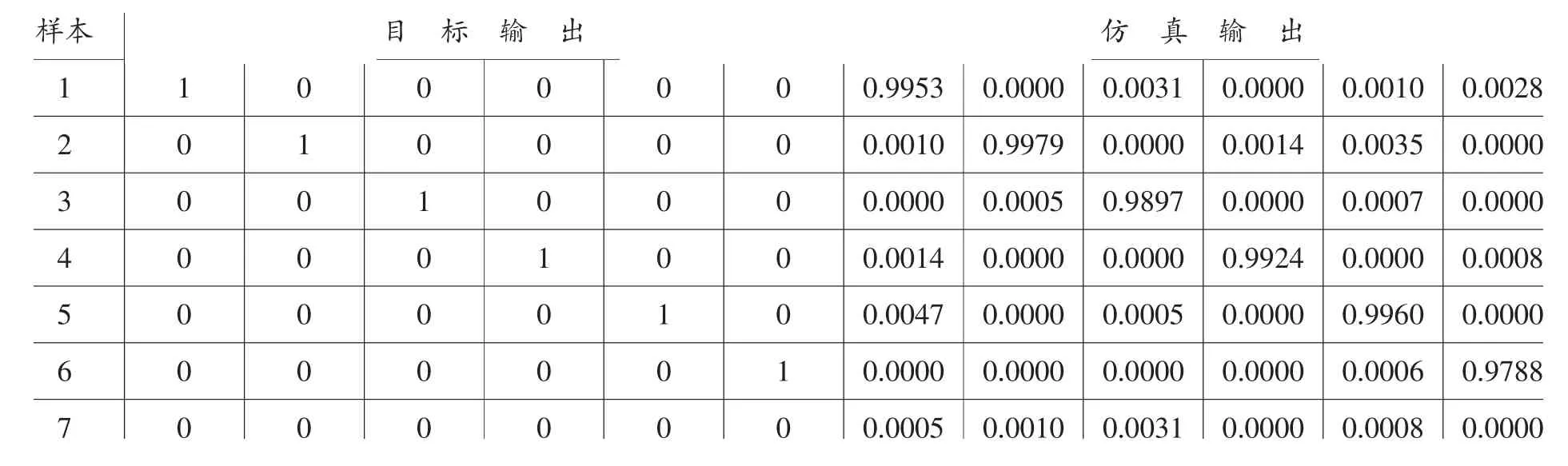
表3 網絡仿真輸出與目標輸出的對比
選擇一個非樣本輸入,檢測系統的容錯和泛化能力。輸入故障征兆:

得到網絡輸出為:

采用故障模糊隸屬度判斷,該故障主要原因應該是電機故障,但是變頻器可能也有故障存在,優化計算得到的結論與工程現場實際做出的判斷相符合。根據分析建立的故障診斷系統,加入了在北京首都國際航空貨運站中集天達空港工程有限公司堆垛機控制系統中,作為控制系統的一個獨立功能模塊存在。通過實際驗證,系統能夠有效準確地對堆垛機復雜故障作出有效的故障原因分析,對復雜多原因的情況,能夠給出可能原因的置信度,使維修工作能夠有重點,同時不放過其他可能性,更加符合現場的實際應用。
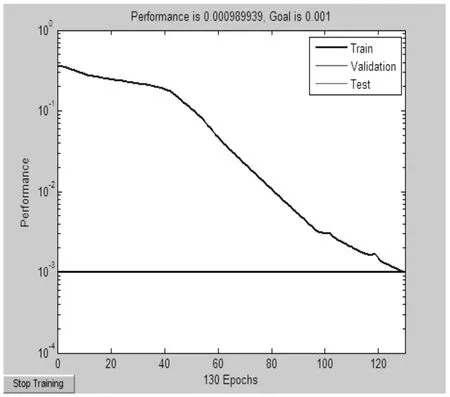
圖3 PSO 優化BPNN 結果
4 總 結
經現場統計,使用了該系統后,堆垛機的MTBF 從原設計的500 小時提升到了978 小時左右,說明該系統對故障的定位分析準確。將故障處理在萌芽狀態,是提升MTBF 的有效途徑。同時由于建立了故障征兆信息實時提取系統,將定量的一些指標參數實時輸入系統,其系統就具備了故障的預判功能,在征兆剛出現的時候,就能夠綜合判斷可能會發生的故障,從而為設備的維護保養提供了科學的參考依據。
[1] Javier Garcia F, Virginia Izquierdo, Miguel Luis J.de, et al. Fault diagnostic system using analytical fuzzy redundancy[J]. Engineering Application of Artificial Intelligence, 2000,13(2):441-450.
[2] Vemuri AT, Marios M P. Neural network-based robust fault diagnosis in robotic systems[J]. IEEE Trans. on Neural Networks,1997,8(6):1410-1419.
[3] 李醫民,胡壽松. 模糊神經網絡技術在故障診斷中的應用[J]. 系統工程與電子技術,2005,27(5):948-952.
[4] 湯旻安. 基于軟計算融合的城市道路交通資源選址研究[D]. 蘭州:蘭州交通大學(博士學位論文),2011.
[5] 牛強. 語義環境下的礦井提升機故障診斷研究[D]. 徐州:中國礦業大學(博士學位論文),2010.
[6] 李國勇. 基于模糊神經網絡的車用發動機智能故障診斷系統[J]. 系統仿真學報,2007,19(5):1034-1037.
[7] 李曉艷. 基于BP 算法的礦井提升機故障診斷系統的研究[D]. 青島:山東科技大學(碩士學位論文),2007.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21