基于多通道投影系統(tǒng)的紋理表面實(shí)時(shí)繪制技術(shù)
2015-12-20 05:30:58陳鋒劉越王涌天
北京航空航天大學(xué)學(xué)報(bào) 2015年3期
關(guān)鍵詞:系統(tǒng)
陳鋒,劉越*,王涌天
(1.北京理工大學(xué) 光電學(xué)院,北京100081;2.北京市混合現(xiàn)實(shí)與新型顯示工程技術(shù)研究中心,北京100081)
隨著投影機(jī)硬件性能的提升與計(jì)算機(jī)圖形圖像技術(shù)的不斷發(fā)展,投影技術(shù)被應(yīng)用到越來(lái)越多的領(lǐng)域中.通過(guò)投影技術(shù)來(lái)改變物體表面的顯示效果是近年來(lái)增強(qiáng)現(xiàn)實(shí)領(lǐng)域的一個(gè)熱門(mén)研究課題.基于投影系統(tǒng)的光照補(bǔ)償技術(shù)可以消除投影表面的交叉反射、散射等現(xiàn)象對(duì)投影效果造成的影響,讓增強(qiáng)現(xiàn)實(shí)技術(shù)應(yīng)用到更多的場(chǎng)合中,用戶(hù)可以更隨意地與日常生活中的實(shí)際物體進(jìn)行交互.
國(guó)內(nèi)外學(xué)者對(duì)基于投影機(jī)-攝像機(jī)結(jié)構(gòu)的光照補(bǔ)償技術(shù)進(jìn)行了大量的研究.楊萍等[1]提出了一種采用彩色數(shù)字相機(jī)在給定的照明及觀測(cè)條件下對(duì)光譜反射率進(jìn)行測(cè)量的方法.通過(guò)奇異值分解將光譜反射率近似為若干基向量的線(xiàn)性組合,結(jié)合相機(jī)的輸出數(shù)據(jù)訓(xùn)練人工神經(jīng)網(wǎng)絡(luò),再將其與基向量結(jié)合,由相機(jī)輸出物體表面的光譜反射率.該算法的提出使得光譜反射率的恢復(fù)更加簡(jiǎn)單,不需要使用昂貴的光學(xué)儀器進(jìn)行相關(guān)測(cè)量.湯一平等[2]提出了基于雙色反射模型的結(jié)構(gòu)光顏色識(shí)別技術(shù),通過(guò)對(duì)攝像機(jī)、投影機(jī)的色度標(biāo)定以及對(duì)物體表面反射率的估計(jì)來(lái)識(shí)別投影機(jī)出射光的顏色.這些算法都基于嚴(yán)格的顏色測(cè)量方法,采用標(biāo)準(zhǔn)色板對(duì)器件進(jìn)行標(biāo)定,計(jì)算精確但卻對(duì)系統(tǒng)要求嚴(yán)格且需要人工干預(yù).文獻(xiàn)[3-6]提出了基于顏色混合矩陣的快速光照補(bǔ)償算法,通過(guò)少量的顏色標(biāo)定圖案來(lái)求取投影機(jī)-攝像機(jī)系統(tǒng)中的顏色混合矩陣,在此基礎(chǔ)上對(duì)目標(biāo)圖像進(jìn)行補(bǔ)償,系統(tǒng)高度自動(dòng)化,無(wú)需人工干預(yù)即可高速求取系統(tǒng)參數(shù)并進(jìn)行實(shí)時(shí)補(bǔ)償.Wetzstein 和 Bimber[7]提出了一種基于光線(xiàn)傳輸矩陣的光照補(bǔ)償算法,通過(guò)分析每個(gè)投影機(jī)像素對(duì)場(chǎng)景光照的貢獻(xiàn)來(lái)對(duì)目標(biāo)圖像進(jìn)行補(bǔ)償,此方法將環(huán)境中的交叉反射、鏡面反射等因素考慮在內(nèi),使得補(bǔ)償系統(tǒng)可以應(yīng)用于更多場(chǎng)合.以上2種采用單臺(tái)投影機(jī)的系統(tǒng)在分辨率、亮度、投影角度等方面受到限制,采用多通道投影技術(shù)可以有效解決這些問(wèn)題.國(guó)內(nèi)外學(xué)者對(duì)應(yīng)用于無(wú)紋理表面上的多通道投影技術(shù)有較長(zhǎng)時(shí)間的研究[8-9],應(yīng)用于紋理表面則需要一些額外的處理.劉一然和楊旭波[10]提出了一種采用多投影的光度補(bǔ)償系統(tǒng),將多通道投影與光照補(bǔ)償技術(shù)結(jié)合到一起,提高了系統(tǒng)分辨率.但其邊緣融合算法沒(méi)有充分考慮到投影機(jī)的非線(xiàn)性響應(yīng)問(wèn)題.Aliaga等[11]提出了另外一種使用多通道投影系統(tǒng)對(duì)復(fù)雜表面進(jìn)行光照補(bǔ)償?shù)乃惴ǎ惴ɑ诠饩€(xiàn)傳輸矩陣,通過(guò)帶有平滑約束的最優(yōu)化算法來(lái)計(jì)算每個(gè)投影像素的輸入,該算法在提高補(bǔ)償精度的同時(shí)提高了系統(tǒng)的亮度范圍.但是,龐大的計(jì)算量使得系統(tǒng)無(wú)法實(shí)時(shí)對(duì)目標(biāo)圖像進(jìn)行補(bǔ)償.
本文提出了一種基于多通道投影系統(tǒng)的紋理表面實(shí)時(shí)繪制技術(shù).通過(guò)分析投影機(jī)-攝像機(jī)系統(tǒng)中的顏色混合特性,以及投影機(jī)對(duì)投影表面的能量貢獻(xiàn)比例來(lái)計(jì)算每個(gè)投影像素的補(bǔ)償輸入.系統(tǒng)還加入了實(shí)時(shí)繪制技術(shù),通過(guò)在平板交互設(shè)備上進(jìn)行繪制,可以實(shí)現(xiàn)對(duì)物體表面圖案的實(shí)時(shí)修改.并分析了系統(tǒng)模型以及相關(guān)參數(shù)的求解方法.
1 系統(tǒng)顏色模型
1.1 單通道投影系統(tǒng)的顏色模型
在投影機(jī)-攝像機(jī)系統(tǒng)中,某個(gè)投影表面點(diǎn)反射的光能量可以描述為

式中,s(λ)為投影表面點(diǎn)針對(duì)不同波段的反射系數(shù);a(λ)為環(huán)境光的光譜分布函數(shù);eK(λ,PK)為投影機(jī)第K個(gè)顏色通道的光譜分布函數(shù),假設(shè)投影機(jī)與攝像機(jī)都具有線(xiàn)性的亮度響應(yīng)(線(xiàn)性化方法將在2.2節(jié)介紹),則有

式中wK(λ)為投影機(jī)K通道歸一化的光譜分布函數(shù).如果攝像機(jī) K通道的光譜效率表示為qK(λ),攝像機(jī)K通道某個(gè)像素獲取的能量為

可以將上式整理為

式中

式中,F(xiàn)為環(huán)境光的貢獻(xiàn);V為顏色混合矩陣,描述了投影機(jī)-攝像機(jī)結(jié)構(gòu)中不同通道的相互影響;下標(biāo)R,G,B分別代表紅色、綠色、藍(lán)色通道.
1.2 多通道投影系統(tǒng)的顏色模型
對(duì)于多通道投影系統(tǒng),式(4)將擴(kuò)展為

式中

式中wi為某臺(tái)投影機(jī)的一個(gè)像素點(diǎn)在顯示最終圖像時(shí)所占的比重.對(duì)于某個(gè)投影表面點(diǎn),其接收到的投影亮度主要取決于投影機(jī)的能量以及入射角,可以用下式來(lái)估計(jì):

式中,ei為投影機(jī)每個(gè)像素的能量大小;θ為每個(gè)投影表面點(diǎn)的法線(xiàn)與入射光線(xiàn)間夾角.對(duì)于表面點(diǎn)i,與之對(duì)應(yīng)的某個(gè)投影像素的權(quán)重就可以通過(guò)下式計(jì)算得出:
為了保證投影機(jī)能量的平滑過(guò)渡,算法對(duì)計(jì)算出的權(quán)重蒙版進(jìn)行平滑處理,避免補(bǔ)償效果中出現(xiàn)亮度的突變.
由此,每個(gè)投影像素的輸入可以用下式求出:

相關(guān)參數(shù)的求取方法將在第2節(jié)中介紹.
2 系統(tǒng)參數(shù)的恢復(fù)
為了對(duì)目標(biāo)圖像進(jìn)行補(bǔ)償,必須計(jì)算出環(huán)境光線(xiàn)的強(qiáng)弱、每臺(tái)投影機(jī)的顏色混合矩陣以及每個(gè)投影像素的亮度權(quán)重.在此之前,還必須求取出投影機(jī)與攝像機(jī)間的幾何映射關(guān)系.
2.1 幾何模型的求取
系統(tǒng)使用格雷碼結(jié)構(gòu)光來(lái)獲取物體表面三維模型以及投影機(jī)模型[12-13],同時(shí)求出投影機(jī)-攝像機(jī)的幾何映射關(guān)系.為了排除環(huán)境光線(xiàn)及內(nèi)部交叉反射的影響,每幅結(jié)構(gòu)光分別投影正反兩幅圖案,每組圖案相減的結(jié)果作為一層編碼數(shù)據(jù).此外,系統(tǒng)引入了RANSAC算子來(lái)提高算法的準(zhǔn)確性.由此建立的系統(tǒng)三維模型可以用于式(7)來(lái)計(jì)算投影像素的權(quán)重.
2.2 攝像機(jī)、投影機(jī)亮度響應(yīng)的線(xiàn)性化
在第1節(jié)的討論中,投影機(jī)與攝像機(jī)的亮度響應(yīng)被假設(shè)為線(xiàn)性,這個(gè)假設(shè)不符合實(shí)際的應(yīng)用情形.系統(tǒng)需要求取投影機(jī)與攝像機(jī)的亮度響應(yīng)曲線(xiàn),通過(guò)建立對(duì)應(yīng)于每個(gè)通道的查找表來(lái)將這些器件的響應(yīng)線(xiàn)性化.
通過(guò) Debevec和 Malik[14]提出的 HDR 成像算法可以求取攝像機(jī)的亮度響應(yīng)曲線(xiàn).獲取到亮度響應(yīng)函數(shù)之后,攝像機(jī)可以用于計(jì)算場(chǎng)景中的相對(duì)亮度,以此測(cè)量并擬合出投影機(jī)每個(gè)通道的亮度響應(yīng)曲線(xiàn).
2.3 顏色參數(shù)的求取
對(duì)于式(4),通過(guò)投影一定數(shù)量的標(biāo)定圖案即可求出F和V.首先求解環(huán)境光照F.當(dāng)投影機(jī)各通道輸入值均為0時(shí),攝像機(jī)捕獲到的圖像亮度就是環(huán)境光照F,如下式所示:

之后,再投影一幅輸入值為(PR,0,0)的圖像:

將兩式相減并展開(kāi)可得

使用同樣的方法投影另外2幅只含有綠色與藍(lán)色值的圖像,可以得出完整的V矩陣.
3 實(shí)時(shí)繪制系統(tǒng)
在建立幾何與顏色映射關(guān)系之后,用戶(hù)可以通過(guò)交互式的平板顯示設(shè)備(如IPAD等)對(duì)投影表面進(jìn)行實(shí)時(shí)繪制.
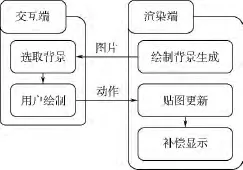
圖1 系統(tǒng)流程圖Fig.1 Flow chart of system
系統(tǒng)流程圖如圖1所示.系統(tǒng)分為交互端、渲染端兩部分.渲染端首先根據(jù)幾何映射信息生成繪制背景,再將此背景傳輸給交互端.交互端可以進(jìn)行背景的選取及繪制操作.在繪制過(guò)程中,用戶(hù)可以設(shè)置線(xiàn)條粗細(xì)和線(xiàn)條顏色,還可以放大某部分區(qū)域進(jìn)行細(xì)節(jié)上的繪制.用戶(hù)在交互端繪制時(shí),用戶(hù)的動(dòng)作信息及畫(huà)筆信息將被傳輸給渲染端,渲染端根據(jù)這些信息更新目標(biāo)圖像,并實(shí)時(shí)生成補(bǔ)償圖像傳輸給投影機(jī)用于顯示.
3.1 繪制背景的生成
系統(tǒng)提供了攝像機(jī)與投影機(jī)等多個(gè)視角的圖像作為繪制背景,用戶(hù)可以根據(jù)實(shí)際應(yīng)用情形選取更適合的視角.攝像機(jī)視角圖像直接通過(guò)攝像機(jī)捕獲.投影機(jī)視角的圖像通過(guò)已經(jīng)獲取的幾何映射關(guān)系來(lái)求取[15].
攝像機(jī)與投影機(jī)視角生成的圖像如圖2所示.用戶(hù)可以根據(jù)實(shí)際需要選取合適的角度進(jìn)行繪制.
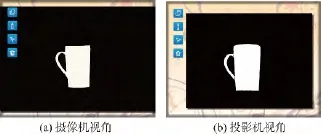
圖2 攝像機(jī)與投影機(jī)視角生成的圖像Fig.2 Images generated by camera and projector views
3.2 補(bǔ)償圖像的生成
為了保證系統(tǒng)運(yùn)行的實(shí)時(shí)性,繪制過(guò)程中,交互端與渲染端傳輸?shù)氖怯脩?hù)的動(dòng)作及畫(huà)筆信息,渲染端在接收到這些繪制信息后實(shí)時(shí)更新系統(tǒng)的目標(biāo)圖像.
在渲染端,系統(tǒng)首先判斷交互端使用的繪制背景,對(duì)于使用攝像機(jī)視角或者其他投影機(jī)視角進(jìn)行繪制的圖像,需要先通過(guò)幾何映射關(guān)系將目標(biāo)圖像映射到當(dāng)前投影機(jī)的視角;然后再根據(jù)每臺(tái)投影機(jī)所占目標(biāo)圖像的權(quán)重計(jì)算對(duì)應(yīng)于每臺(tái)投影機(jī)的目標(biāo)圖像;最后根據(jù)反射率及顏色混合信息計(jì)算每臺(tái)投影機(jī)的補(bǔ)償圖像.渲染流程圖如圖3所示.
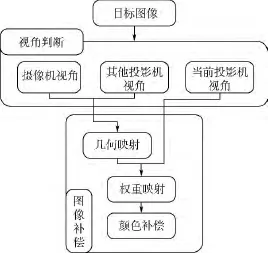
圖3 渲染流程圖Fig.3 Flow chart of rendering
4 結(jié)果及分析
系統(tǒng)采用2臺(tái)投影機(jī)(三洋XU1050C)進(jìn)行投影,通過(guò)Apple IPAD進(jìn)行實(shí)時(shí)繪制.用于投影的物體為一個(gè)帶有彩色方格圖案的杯子.采用佳能450D相機(jī)來(lái)捕獲圖像以計(jì)算各項(xiàng)參數(shù).
獲取幾何模型與顏色模型需要耗費(fèi)大約10 min的時(shí)間.系統(tǒng)采用Shader語(yǔ)言設(shè)計(jì)圖形渲染流水線(xiàn),離線(xiàn)階段求取出的相關(guān)參數(shù)全部被保存在顯卡內(nèi)存中,通過(guò)一維或者二維尋址的方式實(shí)時(shí)計(jì)算出目標(biāo)圖像.在一個(gè)系統(tǒng)配置為Intel 3G*4,GeForce GTX 570,1 280 M memory 的計(jì)算機(jī)上,可以實(shí)時(shí)地(30幀/s)使用2臺(tái)畫(huà)面分辨率為1024×768的投影機(jī)系統(tǒng)進(jìn)行補(bǔ)償.
圖4所示為450D相機(jī)的亮度響應(yīng)曲線(xiàn),其中橫坐標(biāo)表示相機(jī)光學(xué)傳感器接收到的相對(duì)能量值[14],圖5所示為投影機(jī)的亮度響應(yīng)曲線(xiàn).
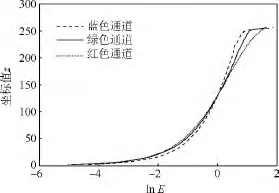
圖4 450D相機(jī)的亮度響應(yīng)曲線(xiàn)Fig.4 Intensity response curves of 450D camera
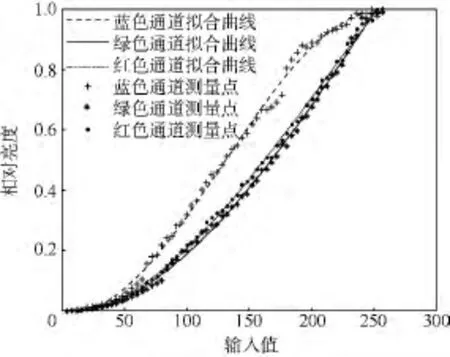
圖5 投影機(jī)的亮度響應(yīng)曲線(xiàn)Fig.5 Intensity response curves of projector
圖6所示為系統(tǒng)的補(bǔ)償結(jié)果.其中圖6(a)為通過(guò)IPAD從相機(jī)角度進(jìn)行繪制的動(dòng)物圖案.圖6(b)為實(shí)際的投影效果.鑒于投影表面并非理想的朗伯表面,從不同角度觀察時(shí)效果會(huì)有偏差.系統(tǒng)的相關(guān)參數(shù)是在相機(jī)視角下測(cè)量的,所以攝像機(jī)位置是系統(tǒng)的最佳觀察位置.

圖6 系統(tǒng)的補(bǔ)償結(jié)果Fig.6 Compensation results of system
4.1 補(bǔ)償準(zhǔn)確性
相比于傳統(tǒng)的光照補(bǔ)償系統(tǒng),本文提出的系統(tǒng)采用多臺(tái)投影機(jī)進(jìn)行補(bǔ)償.采用多通道投影系統(tǒng)可以在某些情況下更為準(zhǔn)確地對(duì)目標(biāo)圖像進(jìn)行補(bǔ)償,補(bǔ)償效果對(duì)比通過(guò)圖7可以看出.其中圖7(a)為目標(biāo)圖像,圖7(b)、圖7(d)為分別使用Fujii與本文算法進(jìn)行補(bǔ)償?shù)男Ч瑘D7(c)、圖7(e)分別為這2種效果與目標(biāo)圖像的差值圖像,圖7(f)為2幅差值圖像的直方圖對(duì)比,其中淺灰色區(qū)域表示圖7(c)中的直方圖,黑色區(qū)域表示圖7(e)的直方圖.

圖7 補(bǔ)償效果對(duì)比Fig.7 Comparison of compensation effects
通過(guò)對(duì)比可以看出,對(duì)于反射率較小的投影表面,使用1臺(tái)投影機(jī)進(jìn)行補(bǔ)償時(shí),由于受到投影機(jī)亮度的限制,某些部分無(wú)法達(dá)到目標(biāo)亮度,也就是通過(guò)補(bǔ)償計(jì)算出的投影機(jī)輸入已經(jīng)超出投影機(jī)的最大值(255),而使用2臺(tái)投影機(jī)進(jìn)行補(bǔ)償時(shí),這部分亮度可以被補(bǔ)償.從圖7中也可以看出,入射角較大的部分無(wú)法很好地被補(bǔ)償,這是因?yàn)殡S著入射角的增大,投影表面能反射回相機(jī)的能量隨之減少,不足以將圖像補(bǔ)償?shù)侥繕?biāo)圖像的亮度值.
4.2 亮度范圍
圖8所示為系統(tǒng)亮度范圍對(duì)比,圖8(b)為對(duì)圖8(a)在藍(lán)色通道的亮度范圍內(nèi)進(jìn)行的分析(只分析黑色框線(xiàn)范圍內(nèi)的圖像),其中x,y表示圖像坐標(biāo),z為歸一化亮度,表示目標(biāo)亮度值與圖中最高亮度值的比例.上層的淺色曲面為使用2臺(tái)投影機(jī)時(shí)能補(bǔ)償?shù)降淖畲笏{(lán)色值,下層深色曲面為使用一臺(tái)投影機(jī)時(shí)能補(bǔ)償?shù)降淖畲笏{(lán)色值.可以看出,使用多通道投影可以有效提高系統(tǒng)的亮度范圍,從而對(duì)更多反射率不同的表面進(jìn)行補(bǔ)償.
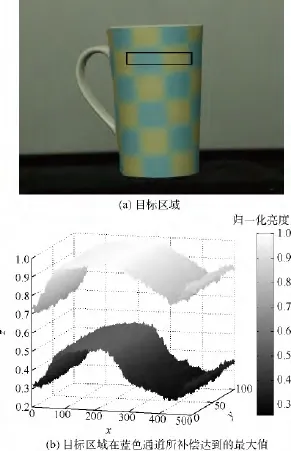
圖8 系統(tǒng)亮度范圍對(duì)比Fig.8 Comparison of system intensity range
4.3 延遲分析
系統(tǒng)作為實(shí)時(shí)繪制系統(tǒng),通過(guò)網(wǎng)絡(luò)連接的繪制段與渲染端間的同步至關(guān)重要,由于投影機(jī)的響應(yīng)及網(wǎng)絡(luò)數(shù)據(jù)傳遞等因素,輕微的延遲無(wú)法避免,表1所示為系統(tǒng)中的延遲分析.
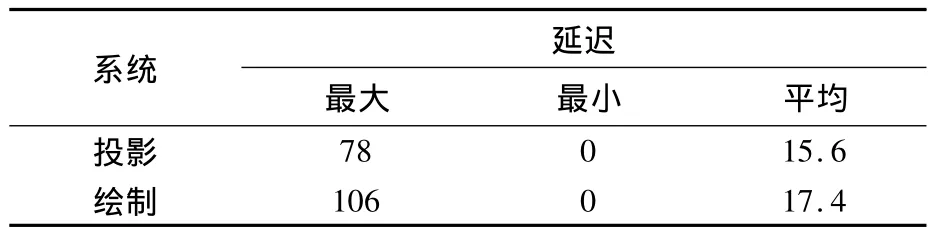
表1 系統(tǒng)中的延遲分析Table1 Delay analysis in system ms
投影延遲是系統(tǒng)用的投影機(jī)相對(duì)于液晶顯示器的延遲,將1臺(tái)電腦同時(shí)連接1臺(tái)液晶顯示器與1個(gè)投影機(jī),讓二者顯示相同的時(shí)間,拍攝20組圖像,記錄時(shí)間差.繪制延遲通過(guò)在IPAD端顯示時(shí)間,錄制圖像并查找2個(gè)顯示端的時(shí)間差來(lái)記錄.系統(tǒng)的平均延遲在一幀左右的時(shí)間,人眼很難察覺(jué)其差異.
5 結(jié)論
本文提出了一種基于多通道投影系統(tǒng)的紋理表面實(shí)時(shí)繪制技術(shù).通過(guò)對(duì)實(shí)驗(yàn)結(jié)果的分析,得出如下結(jié)論:
1)系統(tǒng)可以在帶有紋理、形狀不規(guī)則表面上投影出目標(biāo)圖案,并可以根據(jù)用戶(hù)的意愿進(jìn)行實(shí)時(shí)修改.
2)相對(duì)于單臺(tái)投影系統(tǒng),有效提高了系統(tǒng)亮度范圍,可以對(duì)更多反射率不理想的表面進(jìn)行補(bǔ)償.
3)合理的渲染及網(wǎng)絡(luò)連接方式保證了系統(tǒng)的實(shí)時(shí)運(yùn)行.
未來(lái)的工作將著眼于如何針對(duì)移動(dòng)投影系統(tǒng)進(jìn)行快速的反射率計(jì)算,使得這種表面繪制技術(shù)可以推廣到更多的應(yīng)用中.
References)
[1] 楊萍,廖寧放,宋宏.基于彩色數(shù)字相機(jī)的光譜反射率重建方法研究[J].光譜學(xué)與光譜分析,2009,29(5):1176-1180.Yang P,Liao N F,Song H.Study of approaches to spectral reflectance reconstruction based on digital camera[J].Spectroscopy and Spectral Analysis,2009,29(5):1176-1180(in Chinese).
[2] 湯一平,宗明理,吳麗娟.基于雙色反射模型的彩色結(jié)構(gòu)光顏色識(shí)別的研究[J].計(jì)算機(jī)學(xué)報(bào),2013,36(9):1908-1916.Tang Y P,Zong M L,Wu L J.Research on identification of color structured light based on dichromatic reflection model[J].Chinese Journal of Computers,2013,36(9):1908-1916(in Chinese).
[3] Fujii K,Grossberg M D,Nayar S K.A projector-camera system with real-time photometric adaptation for dynamic environments[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition.Washington,D C:IEEE Computer Society Press,2005,1:814-821.
[4] Nayar S K,Peri H,Grossberg M D,et al.A projection system with radiometric compensation for screen imperfections[C]//Proceedings of the IEEE International Workshop on Projector-Camera System.Washington,D C:IEEE Computer Society Press,2003.
[5] Lee M,Park H,Park J.Fast radiometric compensation accomplished by eliminating color mixing between projector and camera[J].IEEE Transactions on Consumer Electronics,2008,54(3):987-991.
[6] Chen X L,Yang X B,Xiao S J,et al.Color mixing property of a projector-camera system[C]//Proceedings of the 5th ACM/IEEE International Workshop on Projector Camera Systems.New York:ACM Press,2008.
[7] Wetzstein G,Bimber O.Radiometric compensation through inverse light transport[C]//Proceedings of Pacific Conference on Computer Graphics and Applications.Washington,D C:IEEE Computer Society Press,2007:391-399.
[8] 王修暉,華煒,林海,等.面向多投影顯示墻的畫(huà)面校正技術(shù)[J].軟件學(xué)報(bào),2007,18(11):2955-2964.Wang X H,Hua W,Lin H,et al.Screen calibration techniques for multi-projector tiled display wall[J].Journal of Software,2007,18(11):2955-2964(in Chinese).
[9] 周艷霞,秦開(kāi)懷,羅建利.多投影儀自由立體顯示的GPU幾何及亮度校正技術(shù)[J].計(jì)算機(jī)輔助設(shè)計(jì)與圖形學(xué)學(xué)報(bào),2011,23(4):561-570.Zhou Y X,Qin K H,Luo J L.GPU-based geometric and photometric corrections for multi-projector autostereoscopic display[J].Journal of Computer-Aided Design & Computer Graphics,2011,23(4):561-570(in Chinese).
[10] 劉一然,楊旭波.基于相機(jī)的多投影光度補(bǔ)償系統(tǒng)[J].中國(guó)圖象圖形學(xué)報(bào),2011,16(3):342-349.Liu Y R,Yang X B.Camera-based multi-projector radiometric compensation system[J].Journal of Image and Graphics,2011,16(3):342-349(in Chinese).
[11] Aliaga D G,Yu H Y,Law A,et al.Fast high-resolution appearance editing using superimposed projections[J].ACM Transactions on Graphics,2012,31(2):13.
[12] 肖朝,楊紅雨,梁海軍,等.多投影顯示系統(tǒng)結(jié)構(gòu)光幾何校正算法[J].計(jì)算機(jī)輔助設(shè)計(jì)與圖形學(xué)學(xué)報(bào),2013,25(6):802-808.Xiao C,Yang H Y,Liang H J,et al.Geometric calibration for multi-projector display system based on structured light[J].Journal of Computer-Aided Design & Computer Graphics,2013,25(6):802-808(in Chinese).
[13] 王俊,朱利.基于圖像匹配-點(diǎn)云融合的建筑物立面三維重建[J].計(jì)算機(jī)學(xué)報(bào),2012,35(10):2072-2079.Wang J,Zhu L.3D building facade reconstruction based on image matching-point cloud fusing[J].Chinese Journal of Computers,2012,35(10):2072-2079(in Chinese).
[14] Debevec P E,Malik J.Recovering high dynamic range radiance maps from photographs[C]//Proceedings of ACM Siggraph.New York:ACM Press,1997:369-378.
[15] Sen P,Chen B,Garg G,et al.Dual photography[J].ACM Transactions on Graphics,2005,24(3):745-755.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
