基于IFA-ELM的航空發動機自適應PID控制新方法
2015-12-20 05:31:18焦洋李秋紅李業波
北京航空航天大學學報 2015年3期
焦洋,李秋紅,李業波
(南京航空航天大學 能源與動力學院,江蘇省航空動力系統重點實驗室,南京210016)
民用大涵道比渦扇發動機控制通常采用燃油-轉速閉環控制方式.目前國內外普遍采用PID方法對大涵道比發動機進行控制[1-2].雖然PID控制具有一定的魯棒性,且結構簡單、易于工程實現,但由于航空發動機是時變的非線性系統,在全包線內,其參數及特性變化很大,所以單一的PID參數對發動機的全狀態控制很難取得令人滿意的效果,因而通常通過在包線范圍內設置多組PID參數來使其適應發動機的不同工作狀態.而這些PID參數只是針對發動機的某些穩態工作點設定的,不能很好地兼顧發動機的各自動態工作過程,影響系統響應的快速性,且存在控制器之間的切換問題,而切換易造成系統的不穩定,對于發動機控制來說是極為不利的.
針對這一問題,自適應PID控制提供了一種有效的解決方法.采用自適應PID控制可以自動根據發動機工作狀態調節控制系統參數,使之與變化的工作狀態相適應.因而在航空發動機控制領域,自適應PID控制得到了廣泛的關注[3-5].已有學者將智能映射網絡和PID控制相結合,來提高控制系統對發動機參數變化的適應能力,從而提高控制系統的性能.本文借鑒這種設計思想,提出一種新穎的群智能優化算法與智能自適應PID相結合的控制方法.采用具有較快訓練速度的極端學習機(ELM,Extreme Learning Machine)[6-8]對發動機下一步輸出轉速進行預測.由于ELM的輸入層至隱含層權值和偏置隨機產生,不適宜的隨機值會影響估計的精度.為提高預測模型精度,減小網絡計算規模,提出一種改進的螢火蟲算法(IFA,Improved Firefly Algorithm),用于優化ELM的初始權值,形成IFA-ELM算法,構建了基于IFA-ELM網絡參數的民用渦扇發動機自適應PID控制器,在飛行包線內的各種工作狀態間,能夠自動調整控制器參數,獲得穩定快速的響應.
1 IFA-ELM算法
近幾十年發展起來的仿生模擬進化算法具有操作簡單、可并行處理、魯棒性強等特點[9-10].其中,螢火蟲算法(FA,Firefly Algorithm)由模擬自然界中螢火蟲成蟲發光的生物學特性發展而來,也是基于群體搜索的隨機優化算法.該算法由劍橋學者Yang[11-12]提出,適用于解決多峰值優化問題.在基于極端學習機的發動機輸出預測訓練過程中,極端學習機的隱含層權值和偏置與預測效果之間并不具有單調性,因此采用螢火蟲算法來對其進行優化.
1.1 改進的螢火蟲算法
螢火蟲算法是通過模擬螢火蟲的群體行為構造出的隨機優化算法,其仿生原理為:用搜索空間中的點模擬自然界中的螢火蟲個體,將最優目標值的搜索過程模擬成螢火蟲個體移動的過程.
螢火蟲算法主要包含兩個決定要素,即亮度和吸引度.亮度體現了螢火蟲所處位置的優劣,并通過判斷亮度大小決定其移動方向;吸引度決定了螢火蟲移動的距離,通過亮度和吸引度的不斷更新,實現目標優化.
螢火蟲間的相對亮度和吸引度描述為
其中,Iij為螢火蟲i相對螢火蟲j的熒光亮度;Ii0為螢火蟲i的最大螢光亮度,即自身(空間距離r=0處)熒光亮度;γ為光強吸收系數;rij為螢火蟲i與j之間的空間距離;βij為螢火蟲i對螢火蟲j的吸引度;βi0為螢火蟲i的最大吸引度.個體的最大螢光亮度與適應度值相關,適應度值越優,則自身最大熒光亮度越高.
基于相對熒光亮度的排序和比較,確定螢火蟲的移動方向;根據吸引度計算,確定螢火蟲的移動距離:
其中,[K]為xi的優化代數;α為隨機擾動的縮放因子;Iji,max為群體中對螢火蟲i相對熒光亮度最大的個體;xj,max為其位置;βji,max為其對螢火蟲 i的吸引度;nrand為[0,1]上服從均勻分布的隨機因子.
對于FA來說,光強吸收系數γ和縮放因子α是主要的控制參數.較大的α值使得算法具有較強的全局搜索能力,較小的α值使得算法具有較強的局部尋優能力.為平衡算法在前、后期的尋優策略,將常規FA中的固定縮放因子α進行改進,形成IFA.此時,縮放因子α不再為常數,而是通過式(4)根據進化代數調整:

其中,amax和amin為縮放因子的上下限;niter為種群進化迭代次數;m為縮放因子α的調整系數,是在[0,1]之間的常數,調整系數m可反映縮放因子α的變化速度.
具體優化步驟如下:
1)生成初始種群.先將螢火蟲群體隨機散布在預定的解空間,每一只螢火蟲因為所處位置不同且適應度值不同,造成的熒光亮度也不同.
2)選擇螢火蟲可能的移動方向.通過式(1)計算螢火蟲間的相對熒光亮度,通過排序計算出對第i個螢火蟲相對亮度最高的個體,相對熒光亮度高的螢火蟲可以吸引第i個螢火蟲向自己的位置移動.
3)確定移動后的位置.可能移動的方向確定后,根據式(3)和式(4),通過相對熒光亮度的對比,確定是向相對熒光亮度最高的個體移動還是在原來的位置小范圍內擾動,得到更新后的位置.
4)判斷是否達到收斂條件.收斂則結束算法,否則回到步驟2).
這樣經過多代進化后,所有螢火蟲個體都將聚集在其搜索范圍內亮度最高的螢火蟲的附近位置上,從而實現尋優.
1.2 函數優化能力測試
選取3種常見的智能優化算法的測試函數.測試函數如下:
1)Eggcrate Functions:

2)Six hump Camel Back:


3)Schaffer Functions:
參數設置以及優化結果如表1所示.其中,縮放因子調整系數m=0.5,每種算法獨立運行50次.從表中數據不難發現,在不同縮放因子的情況下,相較于FA,IFA均有較好的尋優結果.針對Eggcrate這樣的典型多峰函數,初期較大的縮放因子有利于跳出局部,但是后期對最優解的收斂精度有不利影響;反之,對于Schaffer函數,雖然較小的初始縮放因子可以增加最優解的收斂精度,但是容易陷入局部最優.綜上,即可體現出在提出的IFA算法改進中變縮放因子的優越性.Six hump Camel Back函數結構相對扁平,IFA依然可以取得較好的精度,更加全面地驗證了其有效性.

表1 函數測試結果Table1 Function test results
1.3 基于IFA的ELM改進
在ELM算法中,給定一個訓練數據集χ={x,t}N,針對第 i組訓練數據有 χi={xi,ti}N,其中輸入數據 xi=[xi1,xi2,…,xin]∈Rn,期望輸出數據 ti=[ti1,ti2,…,tis]T∈Rs,輸入層節點數為n,輸出層節點數為 s并設隱含層激勵函數為f(x).
其中,wi=[wi1,wi2,…,win]T為連接隱含層節點 i與輸入層節點的權值;bi為隱含層節點i的偏置;βi=[βi1,βi2,…,βis]T是連接隱含層節點 i和輸出層節點的權值.
對于第i個隱含層節點,其輸出為
結合式(8)和式(9),可以得ELM的學習過程為
4.1.1 以護理項目為評價對象 護理項目是質量評價的基本單元,傳統的護理質量評價主要將護理項目作為評價對象,如特護、1級護理質量、護理技術操作合格率、健康教育的實施效果等。

其中
H為隱含層矩陣;t為期望輸出矩陣.
輸出權值β可由下式求得:

其中H+為ELM網絡輸出層矩陣H的廣義逆.
由于ELM的輸入層權值是隨機給定的,在獲得相同訓練精度的條件下,需要的隱含層節點數較多,而為了追求較高的預測精度往往會使網絡結構變得復雜.
除此之外,復雜的映射網絡結構會相對占用更多的系統資源,增加系統的響應時間,不利于PID參數的動態調整.為了減少隱含層節點的數目,提高ELM算法的穩定性和精度,利用IFA算法優化ELM的輸入層至隱含層的權值和偏置,形成IFA-ELM算法,其流程如下:
1)初始化IFA算法基本參數.設置螢火最大吸引度β0,光強吸收系數γ,縮放因子界限αmax,αmin,縮放因子調整系數 m,最大迭代次數 niter,max,螢火蟲種群規模nv.將適應度值定義為R(·).通過下式計算適應度值:
其中,Pj為螢火蟲個體;βi為輸出層權值;f為隱含層函數;tj為期望輸出.
2)計算螢火蟲的適應度值作為各自最大螢光亮度I0,形成初代螢火蟲種群P.
3)針對種群中的每個個體Pi,利用式(11)計算對應的輸出層矩陣β.
4)根據相對熒光亮度和吸引度決定螢火蟲的移動方向和位置.
5)根據更新后螢火蟲的位置,計算適應度,更新最優個體Pbest,并根據適應度值更新種群個體最大熒光亮度,其中 Ibest0為當代最優個體最大熒光亮度.
6)檢查是否滿足終止條件,即最大迭代次數,若滿足則結束,否則轉步驟3)繼續,迭代計算直到最大迭代次數 niter,max.
7)將最優螢火蟲個體Pbest的結果作為最優輸入層到隱含層的權值和偏置進行輸出.
1.4 IFA-ELM算法仿真測試
為驗證IFA-ELM算法的優化有效程度,將IFA-ELM算法與標準的ELM算法在3個Benchmark回歸數據集上進行了測試,假設螢火最大吸引度β0=1,光強吸收系數γ=0.2,縮放因子界限αmax=0.6,αmin=0.01,縮放因子調整系數 m=0.5,最大迭代次數 niter,max=50,螢火蟲種群規模nv=100.結果如表2所示.表中數據為30次運行結果的平均值,測試環境的 CPU為 I3-M330(1.8 GHz),內存為 4 G.
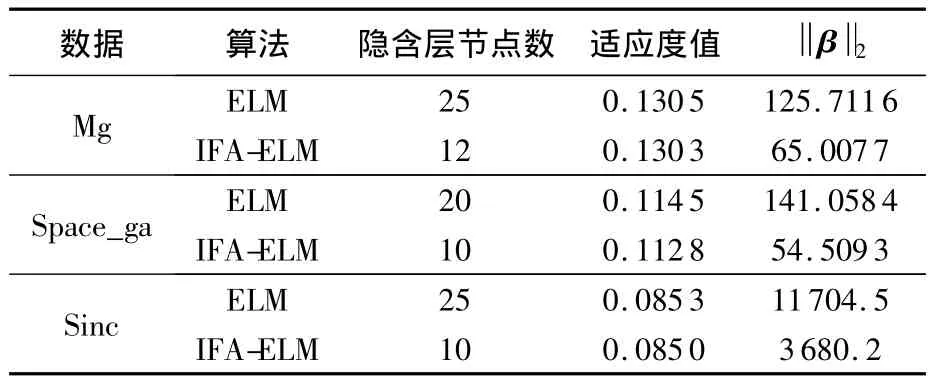
表2 Benchmark回歸數據測試結果Table2 Test results of Benchmark data for regression
與ELM相比,IFA-ELM算法在達到相同的測試精度的情況下,其隱含層節點個數要遠少于ELM算法.這就大大降低了網絡的復雜性,從而減少了算法預測時間,提高了其在線使用的實時性.此外,IFA-ELM的輸出層權值的范數均小于ELM,這說明IFA-ELM具有更好的泛化能力.
2 基于IFA-ELM的自適應控制
2.1 預測模型
設計的航空發動機預測控制系統是通過IFA-ELM智能映射方法對發動機被控變量變化進行預測的.在訓練過程中,需充分利用當前信息及歷史信息,最終準確預測出模型被控量的輸出,這是預測控制的核心思想[14].
在ELM設計過程中,將發動機前一時刻的被控變量輸出、當前時刻的控制量輸入及被控變量輸出作為網絡的輸入,對發動機在下一時刻的被控變量輸出進行預測,依據預測輸出對輸入的變化率調節PID參數.以某型民用航空發動機非線性模型為例進行預測PID控制器的設計控制系統具有如圖1所示的結構.
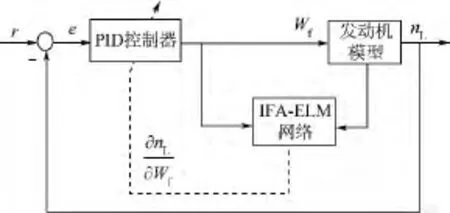
圖1 自適應PID控制系統閉環結構圖Fig.1 Adaptive PID closed-loop control system diagram
模型中,輸入量為燃油流量Wf,輸出量為風扇轉速nL.因此,選擇預測網絡輸入向量r=[r1,r2,r3]T=[nL(k-1),nL(k),Wf(k)]T,其中 k為步數,隱層選8個神經元,輸出為下一步風扇轉速預測n^L(k+1).f為隱含層激勵函數,此處選為logsig,即

采用線性輸出節點,則網絡輸出為系統實際輸出的預測值.

其中,βj為輸出層權值;hj為隱含層輸出.
利用IFA-ELM網絡辨識輸出近似代替發動機的實際輸出.
2.2 基于模型預測的自適應PID控制
離散化后的增量式航空發動機PID控制算法可表示為

其中
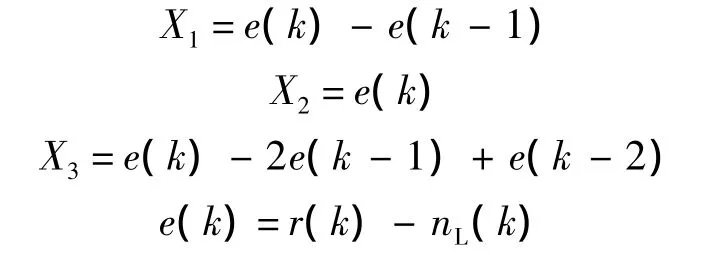
e(k),e(k-1)和e(k-2)分別為系統當前誤差、前1步誤差及前2步誤差;r為轉速指令信號;Kp,Ki和Kd分別為比例系數、積分系數和微分系數.
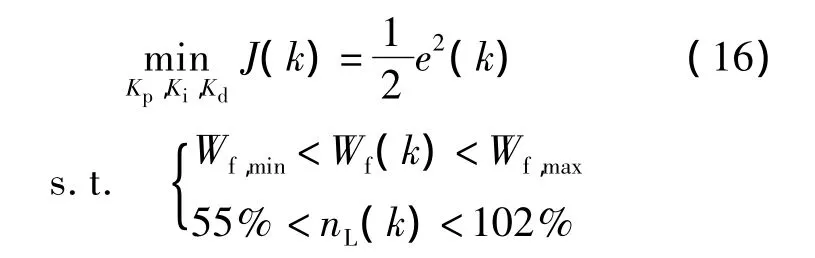
自適應PID控制器性能指標為
采用梯度下降法[15]調整 Kp,Ki和 Kd,可得Kp參數的自整定公式為
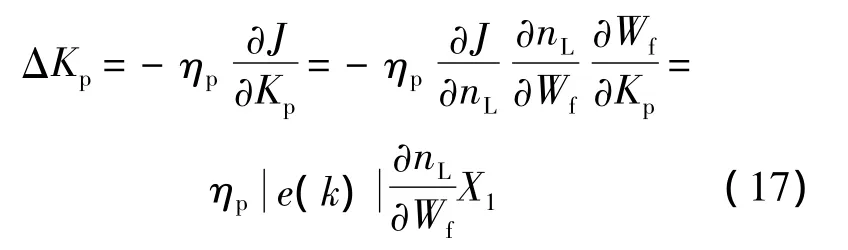
其中,ηp為比例梯度下降系數;?nL/?Wf由IFA-ELM網絡辨識參數,結合式(9)和式(14),可得
其中

ΔKi和ΔKd的自整定公式與ΔKp類似,所以不再給出.可見,該算法實現了基于發動機輸出預測網絡的控制器參數調整.
3 自適應PID控制仿真
在飛行包線內對某通用大涵道比渦扇發動機模型進行了采樣,在飛行高度為10 km內的情況下,通過變化高度和馬赫數,在推拉油門桿位置采集了4604組動態數據.對采樣所得的數據歸一化,選其中的2/3作為訓練數據,其余作為測試數據.借助Matlab分別采用常規ELM、BP神經網絡以及IFA-ELM這3種算法進行網絡訓練和測試,隱含層節點數均選為8個,結果如圖2和圖3所示.可見IFA-ELM網絡能夠很好地預測發動機的輸出,并且精度相較于前兩種智能映射網絡有明顯提高.
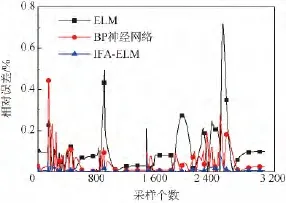
圖2 訓練數據相對誤差Fig.2 Training data relative error
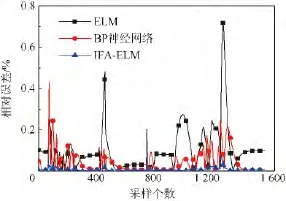
圖3 測試數據相對誤差Fig.3 Testing data relative error
將所訓練的IFA-ELM網絡用于PID控制參數的調整,開展基于IFA-ELM網絡的自適應PID控制的仿真驗證,以選擇2個工作點為例:①在地面點:高度H=0 km,馬赫數為0,油門角度從20°推到70°再回到20°的大動態仿真模擬;②常規民機巡航點:高度H=10 km,馬赫數為0.8,油門角度從50°推到70°再回到50°的中等過渡狀態仿真模擬.經調試,初始PID參數分別為地面點:Kd=0.1,Ki=0.1,Kp=3;常規民機巡航點:Kd=0.1,Ki=0.3,Kp=5.
圖4為H=0 km時的PID參數整定曲線,可見伴隨著發動機工作狀態的變化,PID參數發生較大的調整,實現了PID參數的在線自適應整定.

圖4 H=0 km時的PID參數整定曲線Fig.4 PID parameter tuning curves when H=0 km
圖5給出了被控制量nL、燃油流量Wf、壓氣機出口總壓P3、渦輪前總溫T4以及余氣系數αk的響應曲線.由圖可見,系統工作在安全限制范圍內,與常規PID控制相比,自適應PID控制具有更快的響應速度.為了清晰顯示兩種控制算法的差異,圖5中同時給出了nL響應曲線的兩點放大圖.A點在初始加速階段,B點在減速終止階段.加速起始階段,常規PID控制存在較為明顯的滯后;自適應PID控制通過在線快速調整控制器參數輸出,能快速、準確跟蹤指令信號.在減速終止階段,常規PID控制有較大超調,調節時間較長,自適應 PID超調量減少1.5%,調節時間縮短1.4 s(按±2%誤差帶計算),驗證了在大的動態過程中自適應PID控制的優越性.
圖6和圖7給出了中等過渡狀態下PID參數和發動機輸出響應曲線.由圖可見,PID參數同樣發生了較大范圍的調整,其他參數也都在安全范圍之內.圖7中同樣給出了nL響應曲線的兩點放大圖,都是在接近穩態處的響應對比,與常規PID控制相比,自適應PID控制在超調量和調節時間上具有明顯的優勢,超調量至少減小0.2%,調節時間至少縮短0.2 s.
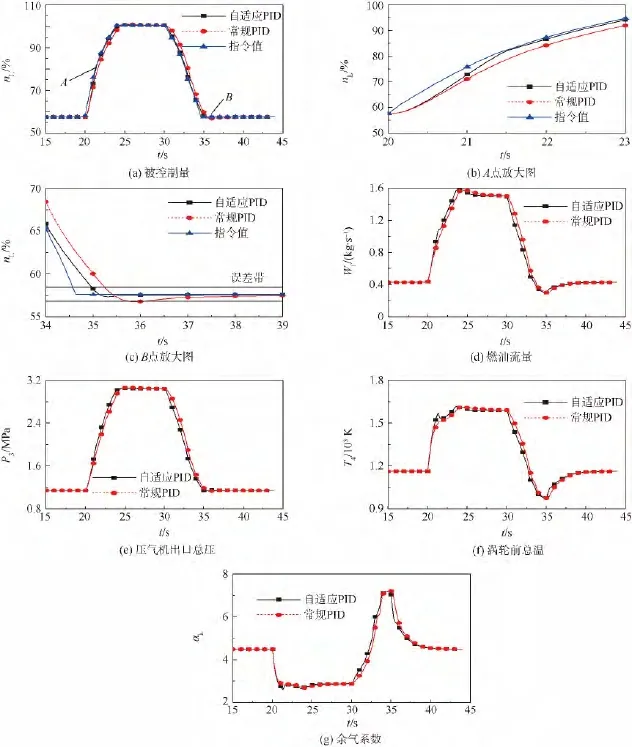
圖5 H=0 km時的發動機響應曲線Fig.5 Engine response curves when H=0 km
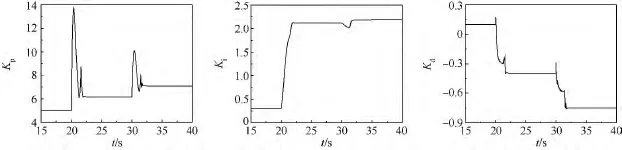
圖6 H=10 km時的PID整定曲線Fig.6 PID parameter tuning curves when H=10 km
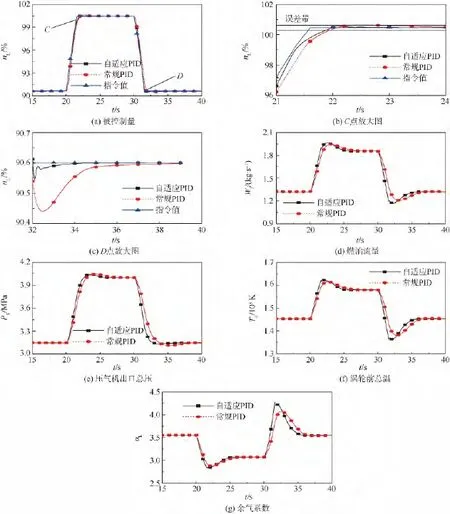
圖7 H=10 km時的發動機響應曲線Fig.7 Engine response curves when H=10 km
4 結論
本文提出一種IFA-ELM優化算法,將改進的螢火蟲算法用于優化ELM輸入層至隱含層的權值和偏置,可在保證ELM預測精度的前提下減小網絡的規模,增強其泛化能力,提高控制系統的實時性.基于某型民用渦扇發動機,利用IFA-ELM算法設計了模型預測PID控制.相較常規PID控制,自適應PID控制能夠根據發動機動態性能變化在線調整PID參數,從而提高控制系統對對象參數變化的適應能力,進一步提高控制系統的性能.該算法從一組PID控制參數開始,利用一組離線訓練的極端學習機網絡參數,可實現全包線范圍內的發動機各種工作狀態控制,具有良好的實時性,與需要在包線內通過高度、馬赫數、油門角度差值的常規發動機PID控制相比,占用的存儲空間更小,計算過程更簡便,動態控制性能更好.
References)
[1] Milhim A B.Modeling and fault tolerant PID control of a quadrotor UAV[D].Montreal:Concordia University,2010.
[2] 殷鍇,陶金偉,王鴻鈞,等.民用航空發動機控制系統回路設計與仿真[J].航空計算技術,2013,42(6):107-110.Yin K,Tao J W,Wang H J,et al.Closed-loop design and simulation of civil aero-engine control system[J].Aeronautical Computing Technique,2013,42(6):107-110(in Chinese).
[3] 喬伯真,緱林峰.模糊自整定PID的航空發動機轉速控制研究[J].計算機仿真,2013(4):63-67.Qiao B Z,Hou L F.Rotating speed control for aero-engine based on fuzzy self-tuning PID controller[J].Computer Simulation,2013(4):63-67(in Chinese).
[4] 李述清,張勝修,劉毅男.航空發動機全包線最優PID控制器設計[J].彈箭與制導學報,2011,31(4):105-107.Li S Q,Zhang X S,Liu Y N.Neural network based on optimal PID controller over whole envelope for an aero-engine[J].Journal of Projectiles,Rockets,Missiles and Guidance,2011,31(4):105-107(in Chinese).
[5] 趙俊,陳建軍,王靈剛.航空發動機的智能神經網絡自適應控制研究[J].航空動力學報,2008,23(10):1913-1920.Zhao J,Chen J J,Wang L G.New intelligent neural network adaptive control scheme research for aero-engine[J].Journal of Aerospace Power,2008,23(10):1913-1920(in Chinese).
[6] Huang G B,Ding X,Zhou H.Optimization method based extreme learning machine for classification[J].Neurocomputing,2010,74(1):155-163.
[7] Suresh S,Saraswathi S,Sundararajan N.Performance enhancement of extreme learning machine for multi-category sparse data classification problems[J].Engineering Applications of Artificial Intelligence,2010,23(7):1149-1157.
[8] Liu N,Wang H.Ensemble based extreme learning machine[J].IEEE Signal Processing Letters,2010,17(8):754-757.
[9] 李雪梅,張素琴.基于仿生理論的幾種優化算法綜述[J].計算機應用研究,2009,26(6):2032-2034.Li X M,Zhang S Q.Overview of some optimization algorithm based on bionic theory[J].Application Research of Computers,2009,26(6):2032-2034(in Chinese).
[10] Zang H,Zhang S,Hapeshi K.A review of nature-inspired algorithms[J].Journal of Bionic Engineering,2010,7(Supplement):S232-S237.
[11] Yang X S.Nature-inspired metaheuristic algorithms[M].Beckington:Luniver Press,2010:81-89.
[12] Yang X S.Firefly algorithms for multimodal optimization[M].Heidelberg,Berlin:Springer,2009:169-178.
[13] Silva D N G,Pacifico L D S,Ludermir T B.An evolutionary extreme learning machine based on group search optimization[C]//Proceeding of 2011 IEEE Congress on Evolutionary Computation.Paris:IEEE,2011:574-580.
[14] Richter H,Singaraju A V,Litt J S.Multiplexed predictive control of a large commercial turbofan engine[J].Journal of Guidance,Control,and Dynamics,2008,31(2):273-281.
[15] 李秋紅,許光華,孫健國.航空發動機小波神經網絡PID控制[J].航空動力學報,2009,24(4):875-879.Li Q H,Xu G H,Sun J G.Aero-engine wavelet neural network PID control[J].Journal of Aerospace Power,2009,24(4):875-879(in Chinese).
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代企業(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
