考慮槳葉陀螺效應的四旋翼定點飛行動態面控制
2015-12-28 08:39:10邵鵬杰董文瀚馬駿馮通
飛行力學 2015年5期
邵鵬杰,董文瀚,馬駿,馮通
(空軍工程大學 航空航天工程學院,陜西 西安710038)
0 引言
四旋翼是一個四驅動、六自由度的強耦合非線性系統,文獻[1]建立了其典型的數學模型。模型中槳葉陀螺效應相比于各槳葉旋轉產生的升力對機體的扭矩較小,絕大多數文獻基于微小型四旋翼進行研究,為簡化控制器設計,該項常被忽略[2]。隨著載重的增加,對四旋翼執行機構的抗變形性提出了更高的要求;隨著槳葉材質性能的提高,其轉動慣量相應增大,槳葉陀螺效應對四旋翼運動的影響也隨之增大。因此,建模時槳葉陀螺效應必須考慮。
實際應用中,飛行控制仍以PID方法為主。但傳統PID方法有如下缺點:控制器參數較多、僅由經驗選取,且提高快速性后會導致高頻振蕩[3];當槳葉陀螺效應變大時,高頻振蕩特性將會更加凸顯出來。近年來為了克服上述缺點,研究人員提出了多種非線性控制方法,比較典型的有Backstepping控制[4]、滑模控制[5]、H∞控制[6]等。文獻[4]保留了對系統有用的非線性內容,設計了一種基于Backstepping方法的控制器,但其控制算法過于復雜、工程實現困難。為此,研究人員在反步法的基礎上提出了動態面控制方法[7]。
本文首先針對槳葉陀螺效應對四旋翼的影響,建立了較為精準的動力學模型;然后,為了克服傳統PID控制方法的缺點,提出了一種克服槳葉陀螺效應對四旋翼運動不利影響的動態面控制方法,并通過仿真試驗驗證了該方法的有效性。
1 四旋翼動力學建模
四旋翼結構模型如圖1所示。
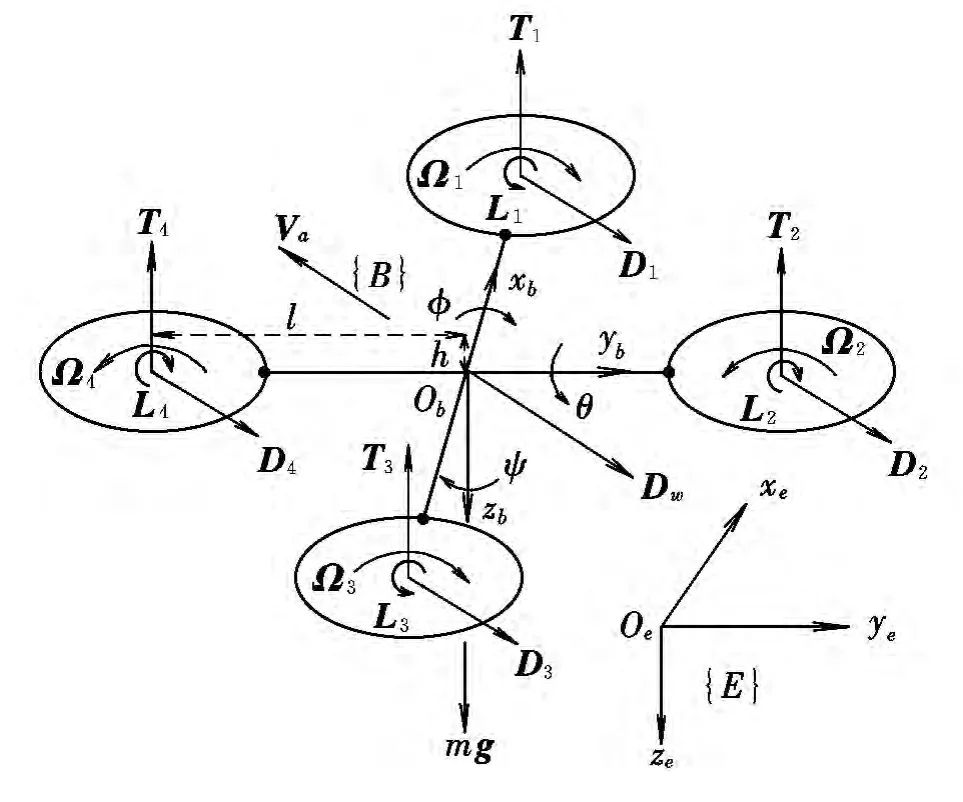
圖1 四旋翼結構模型Fig.1 Structure model of quadrotor
圖中:{E}系統為慣性坐標系;{B}系統為機體坐標系;l為旋翼中心到機體質心的縱向距離;h為旋翼中心到機體質心的垂直距離;Va為空速;Dw為機體與空氣摩擦產生的阻力;Ωi為旋翼i的轉速(i=1,2,3,4);Ti為旋翼 i產生的升力;Di為旋翼 i產生的阻力;Li為旋翼i產生的側傾力矩;φ為滾轉角;θ為俯仰角;ψ為偏航角。
四旋翼由圖1中四個電機和槳葉提供動力,1,3槳葉和2,4槳葉的旋轉方向相反,同時增大或減小4個電機的旋轉速度可引起四旋翼的垂直運動;使1,3電機的轉速反向變化,可引起四旋翼的俯仰運動;使2,4電機的轉速反向變化,可引起四旋翼的滾轉運動;4個電機的轉速的代數和引起四旋翼的偏航運動。每個電機產生一個和電機轉速Ωi的平方成正比的升力Ti,即Ti=bΩ2i[8],b 為升力系數。
根據牛頓第二定律,系統動力學方程為:

式中:F,M分別為{E}系中加在四旋翼上的合外力、合力矩;m為四旋翼質量;V為四旋翼在{E}系中的速度;H為四旋翼在{E}系中的角動量。
現有文獻中,研究對象一般為微小型四旋翼,其槳葉質量與機體質量相比較小,槳葉陀螺效應對機體運動的影響甚微,為便于研究,在建模或控制器設計過程中一般予以忽略[9]。對大型四旋翼而言,槳葉質量增大,槳葉陀螺效應隨之增大,對于機體運動的影響不可忽略。因此,模型中必須引入如下槳葉陀螺效應計算公式:

式中:Ω=Ω1-Ω2+Ω3-Ω4;q,p分別為機體繞 y,x軸的轉動角速度;Ir為槳葉轉動慣量。
根據受力分析可知,機體在{B}系中所受合力與合力矩為:
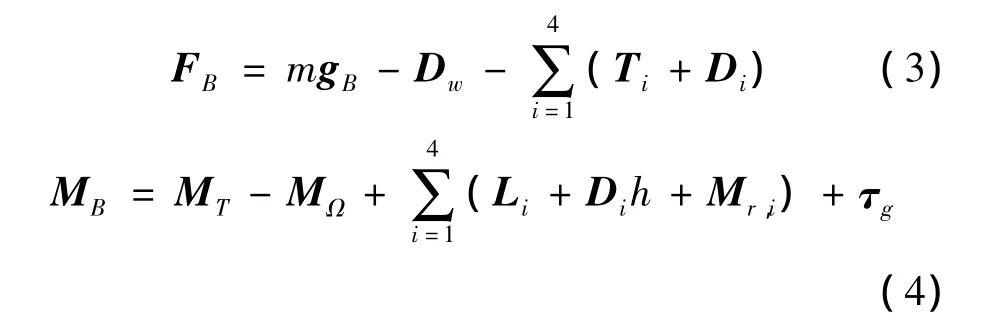

運動學方程如下:
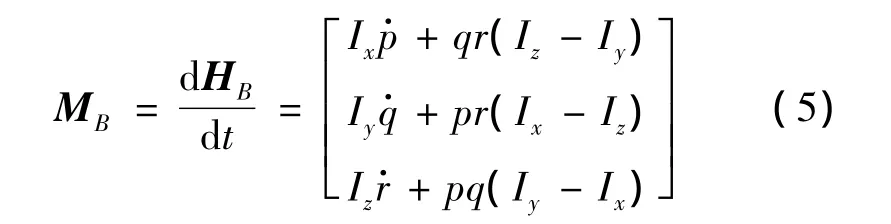
式中:Ix,Iy,Iz分別為四旋翼在{B}系中繞三軸的轉動慣量。
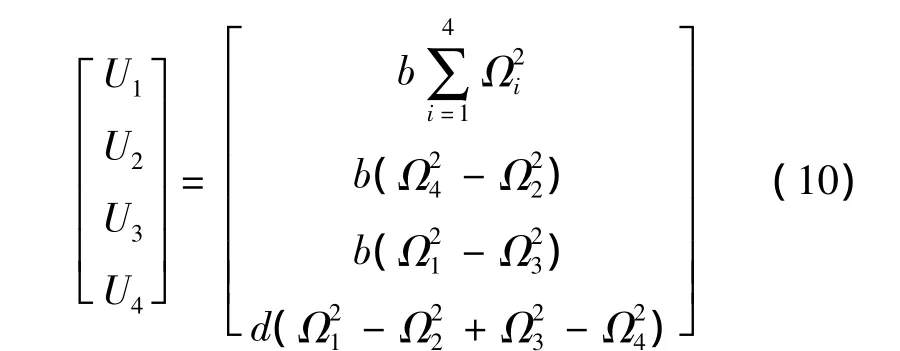
機體坐標系到慣性坐標系的轉換矩陣:
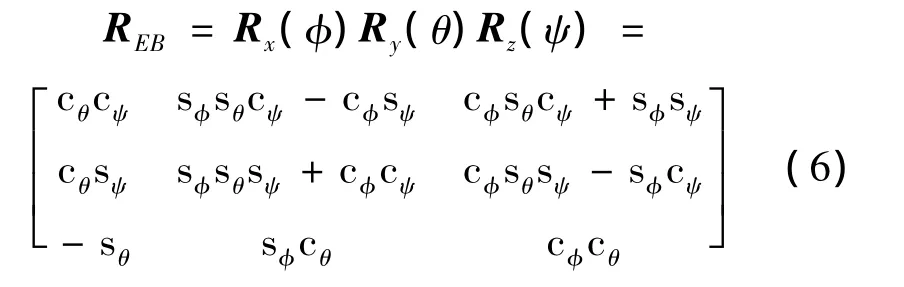
式中:c*=cos*;s*=sin*;*=θ,φ,ψ。
假設{B}系原點與質心重合,即h=0;考慮到四旋翼飛行速度慢,因此忽略小量Li,Dw,MΩ。將所有公式轉換到慣性坐標系{E}中,于是得到以下考慮槳葉陀螺效應的四旋翼動力學模型:
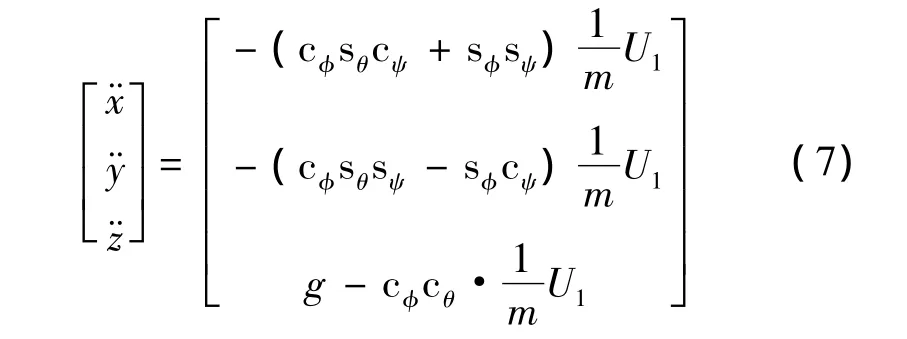
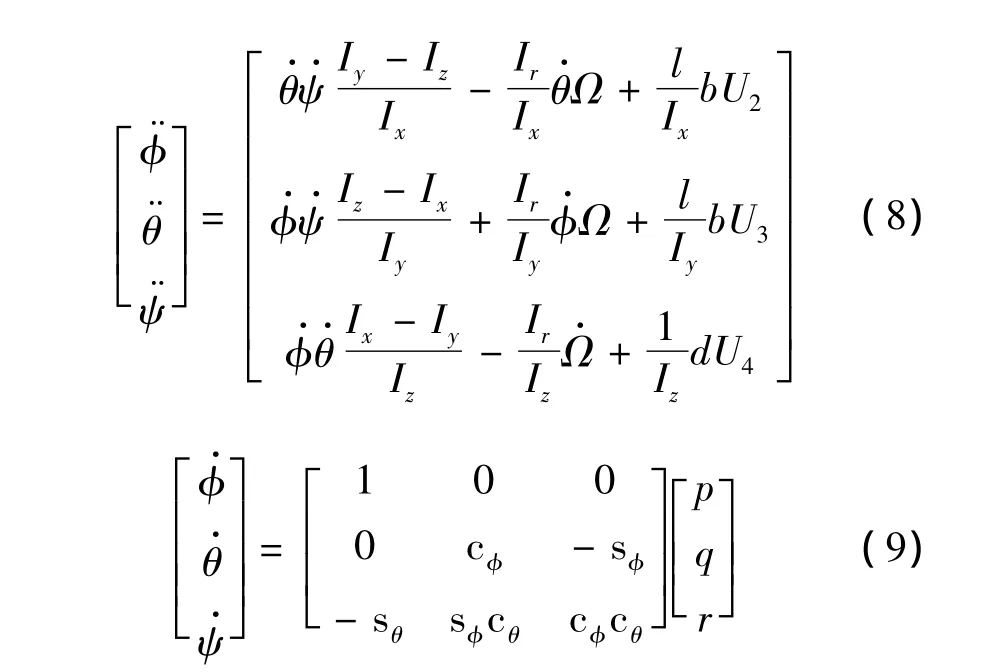
定義輸入量:
2 考慮槳葉陀螺效應的動態面控制律
2.1 四旋翼雙回路控制系統
通過定義 U1,U2,U3,U4系統被分解成 4個獨立的控制通道。控制器設計分為內環控制和外環控制,內環回路為姿態控制回路,外環回路為位移控制回路。四旋翼雙回路控制結構如圖2所示。
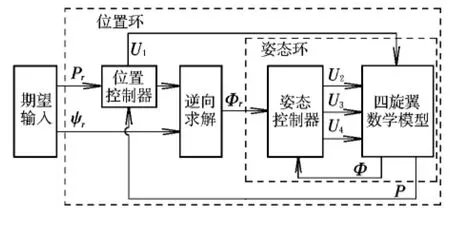
圖2 控制系統結構Fig.2 Structure of control system
圖中:Pr為期望位置;ψr為期望偏航角;Φr為期望歐拉角。
2.2 內環姿態控制律
考慮到槳葉陀螺效應會對機體的運動產生干擾,需要在控制器的設計中抵消槳葉陀螺效應的影響。因此,在PID-DSC控制方法[10]的基礎上進行改進,對姿態環進行DSC控制設計,并分別在U2,U3通道中加入相應的抵消項本文以滾轉通道控制器設計為例,進行內環姿態控制律設計。
Step1:定義動態面S1=φ-φd,對其求導得:




為了使S2→0,實際可取輸入U2為:
Step3:穩定性分析。定義跟蹤誤差為:
結合式(14)和式(15),得到:

再結合式(13)和式(18),式(19)可寫為:

結合式(12)和式(14),式(17)可寫為:

很容易得到以下不等式:

對連續函數Γ而言,若對任意的 p>0,q>0,滿足A:={V≤p}和,則函數Γ存在一個最大值M。因此,式(20)可化為如下不等式:
根據Lyapunov穩定性定理,上述設計過程得到的閉環系統漸進穩定。
同理,可以求得俯仰通道的控制器為:
其中:
偏航通道控制器為:
其中:
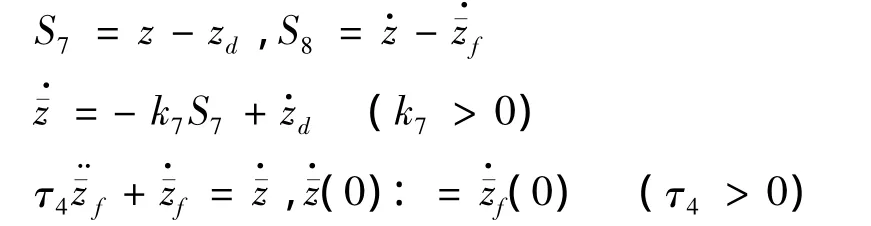
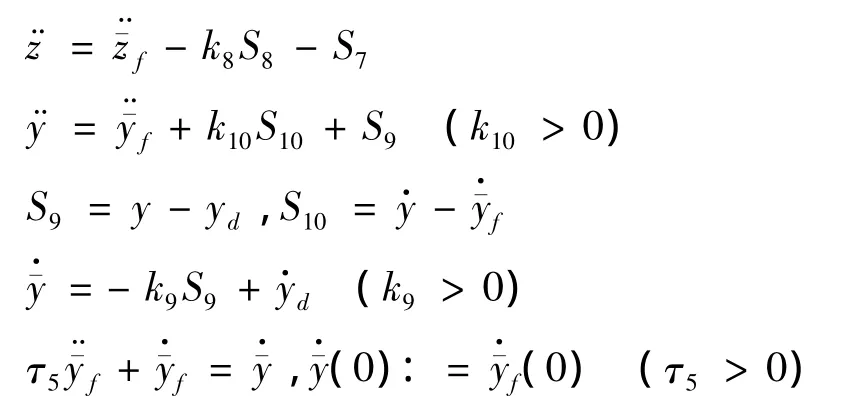
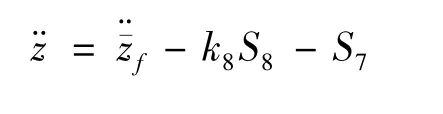
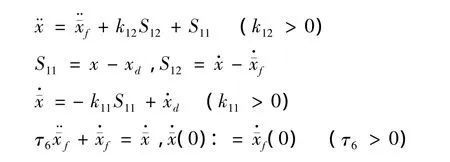
2.3 外環位置控制律
同內環姿態控制律設計,求得高度控制器為:

其中:
考慮到四旋翼在運動過程中姿態角變化很小(φ≈0,θ≈0),將 U1帶入式 (13)中 x方向方程可得期望滾轉角φd,即:

其中:
同理,將U1帶入式(8)中y方向方程可得期望俯仰角 θd,即:

其中:
3 仿真結果及分析
為驗證本文針對考慮槳葉陀螺效應所設計的DSC方法的可靠性,與文獻[10]提出的PID-DSC方法進行對比試驗,控制器參數分別如表1和表2所示。
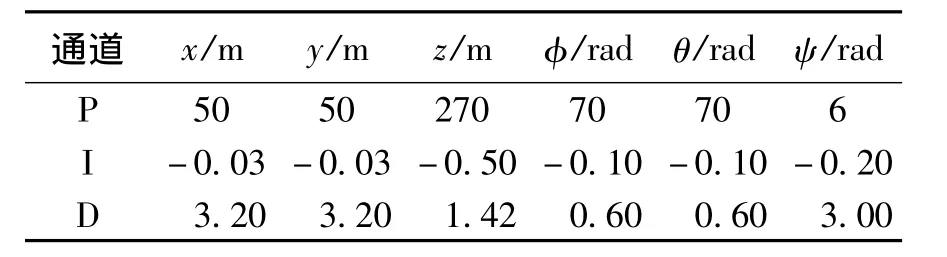
表1 PID控制器參數Table 1 Parameters of PID controllers
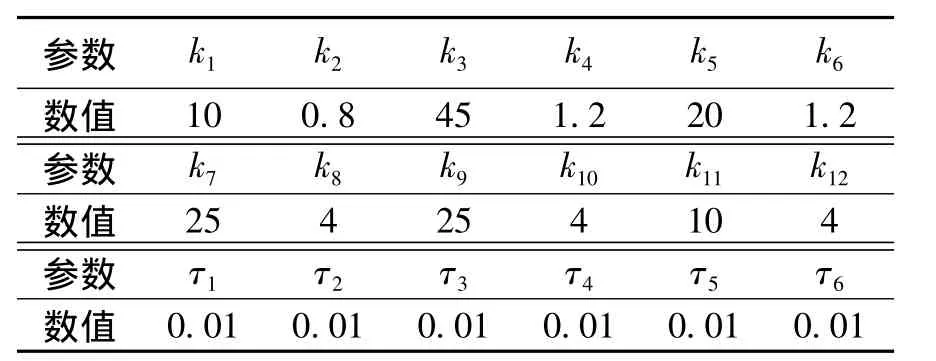
表2 DSC控制器參數Table 2 Parameters of DSC controllers
該算例令樣機從慣性坐標系原點起飛,到達空間某一位置并保持懸停。設置仿真時間t=10 s。初始狀態:P=(0,0,0)m,Φ =(0,0,0)rad;目標狀態:P=(5,5,10)m,Φ =(0,0,0.3)rad。始末狀態的線速度和角速度均為0。由于每個電機受最快轉速和安全最低轉速的制約,每個通道的輸入均有一個閥值:U1∈[0,20],U2∈[-5,5],U3∈[-5,5],U4∈[-0.182,0.182]。
本文仿真模型動力學參數為:m=1.626 5 kg,l=0.321 m,Ix=0.031 517 kg˙m2,Iy=0.031 528 kg˙m2,Iz=0.049 75 kg˙m2,Ir=0.008 kg˙m2,b=1.55e-05,d=2.82e-07。設置 3組對比仿真試驗,結果如圖3所示。
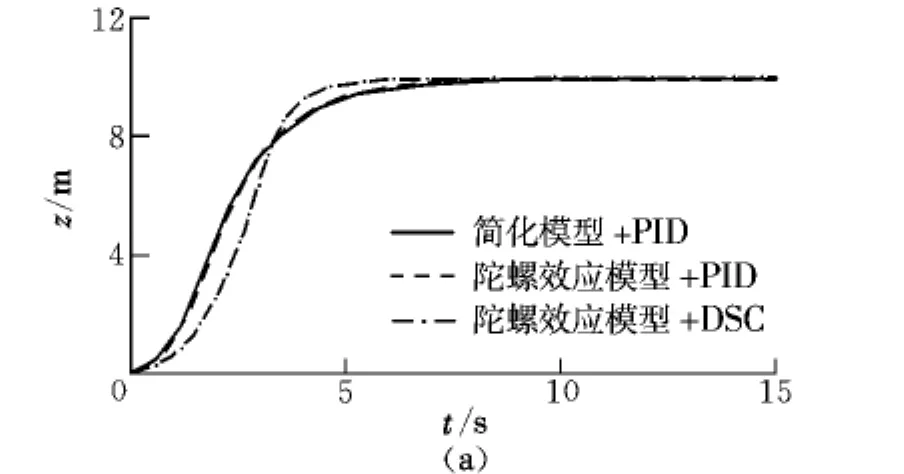

圖3 位移、姿態角仿真結果Fig.3 Simulation results of position and attitude
由圖3及表1、表2可以得出以下結論:
(1)不考慮槳葉陀螺效應時,PID能有效控制四旋翼,各指標調節時間ts均比較長。考慮槳葉陀螺效應時,控制器參數相同的PID控制器不能完全有效控制四旋翼,位置收斂效果較好;但姿態角收斂效果及穩定性變差,滾轉角φ和俯仰角θ在平衡位置小角度高頻振蕩,偏航角ψ嚴重漂移。
(2)考慮槳葉陀螺效應時,DSC能有效控制住四旋翼,各指標收斂迅速、穩定性好,且調節時間ts均比較短。
(3)基于PID,DSC控制算法的控制器需分別設計并調試18個,12個參數,DSC算法下的控制器參數變少,簡化了控制器。
4 結束語
本文提出的DSC方法能有效克服傳統PID方法對考慮槳葉陀螺效應模型控制穩定性不強、部分信號漂移的缺點。該方法具有以下優點:算法比反步法簡單;參數較PID控制器少,便于控制器設計;反應迅速,調節時間ts比PID控制短;穩定性強,有效克服了PID方法下出現高頻振蕩的缺點。
[1] Schreier M.Modeling and adaptive control of a quadrotor[C]//Proceeding of the 2012 IEEE International Conference on Mechatronics and Automation.IEEE,2012:383-390.
[2] Fernando H C T E,De Silva A T A,De Zoysa M D C,et al.Modelling,simulation and implementation of a quadrotor UAV[C]//2013 IEEE 8th International Conference on Industrial and Information Systems.IEEE,2013:207-212.
[3] 李杰,齊曉慧,韓帥濤.基于GA-Vague-PID的小型四旋翼飛行器姿態控制方法[J].自動化技術與應用,2013,32(3):1-6.
[4] 聶博文.微小型四旋翼直升機建模及控制方法研究[D].長沙:國防科學技術大學,2006.
[5] Bouadi H,Simoes Cunha S,Drouin A,et al.Adaptive sliding mode control for quadrotor attitude stabilization and altitude tracking[C]//2011 IEEE 12th International Symposium on Computational Intelligence and Informatics.IEEE,2011:449-455.
[6] 蔡國瑋,陳本美,李崇興,等.無人駕駛旋翼飛行器系統[M].北京:清華大學出版社,2012:103-111.
[7] Liang Yong,Li Ruitao,Zhang Youan,et al.An improved method of dynamic surface control for a class of nonlinear systems[C]//Proceeding of the 30th Chinese Control Conference.IEEE,2011:401-404.
[8] Prouty R W.Helicopter performance,stability,and control[M].Boston:Krieger Publishing Company,1986:20-23.
[9] Li Sen,Li Baokui,Geng Qingbo.Adaptive sliding mode control for quadrotor helicopters[C]//Proceedings of the 33rd Chinese Control Conference.IEEE,2014:71-76.
[10] Lee K U,Kim H S,Park J B,et al.Hovering control of a quadrotor[C]//2012 IEEE 12th International Conference on Control, Automation and Systems.IEEE,2012:162-167.
猜你喜歡
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學物理·高中(2016年12期)2017-04-22 11:53:03
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
舒適廣告(2008年9期)2008-09-22 10:02:48
