多相機(jī)數(shù)碼影像光束法解算及精度分析
2016-01-05 01:39:50趙海強(qiáng),李浩,錢海明等
測繪工程 2015年4期
多相機(jī)數(shù)碼影像光束法解算及精度分析
趙海強(qiáng),李浩,錢海明,仝紅菊
(河海大學(xué)地球科學(xué)與工程學(xué)院,江蘇南京210098)
摘要:光束法算法通常用于解決同一相機(jī)影像的平差解算問題,文中探討多相機(jī)數(shù)碼影像的光束法解算方法,理論研究與實(shí)驗(yàn)分析相結(jié)合,研究建立多相機(jī)影像光束法的平差模型,并在相同條件下與單相機(jī)光束法解算結(jié)果相比較。結(jié)果表明,多相機(jī)數(shù)碼影像光束法嚴(yán)密平差可解,且分別在不同的控制條件下與單相機(jī)光束法解算精度相當(dāng)。
關(guān)鍵詞:多相機(jī);光束法;數(shù)碼影像;精度;畸變參數(shù)
中圖分類號:P23文獻(xiàn)標(biāo)志碼:A
收稿日期:2014-02-17
基金項(xiàng)目:國家自然科學(xué)基金資助項(xiàng)目(51079053);江蘇省自然科學(xué)基金資助項(xiàng)目(SBK201221489)
作者簡介:趙海強(qiáng)(1988-),男,碩士研究生.
Calculationandprecisionanalysisofbundleadjustmentofmulti-cameradigitalimages
ZHAOHai-qiang,LIHao,QIANHai-ming,TONGHong-ju
(SchoolofEarthSciencesandEngineering,HohaiUniversity,Nanjing210098,China)
Abstract:Bundle adjustment algorithm is commonly used to solve the problem of the same camera images. This paper will explore the bundle adjustment of multi-camera digital images for the first time,by combining theoretical research and experimental analysis to establish the bundle adjustment model of multi-camera,and to compare the results with a single camera under the same conditions. The results show that the bundle adjustment of multi-camera digital images can be solved,and get similar accuracy with a single camera under the control of different conditions.
Keywords:multi-camera;bundleadjustment;digitalimages;accuracy;distortionparameters

近景攝影測量因其快捷和非接觸測量方式[1]廣泛應(yīng)用在工程、工業(yè)和建筑等各個(gè)領(lǐng)域[2]。而普通數(shù)碼相機(jī)以其體積小、質(zhì)量輕、方便使用、靈活性強(qiáng)等特點(diǎn)已廣泛應(yīng)用在近景攝影測量中[3]。目前,在大多數(shù)近景攝影測量工作中常使用同一數(shù)碼相機(jī)獲取原始影像數(shù)據(jù),按傳統(tǒng)光束法平差模型嚴(yán)密解算獲取物方點(diǎn)點(diǎn)位坐標(biāo)。然而,實(shí)際工程應(yīng)用情況復(fù)雜多樣,外業(yè)影像數(shù)據(jù)的采集并不總是采用同一臺相機(jī)完成,一些項(xiàng)目將兩臺或者更多的相機(jī)搭載到同一個(gè)平臺下獲取設(shè)定重疊度的原始影像,或者直接采用不同的相機(jī)拍攝獲取數(shù)碼影像,同樣得到立體模型,將一臺相機(jī)的拍攝任務(wù)轉(zhuǎn)換為兩臺或更多臺相機(jī)完成,每臺相機(jī)有其各自的相機(jī)內(nèi)參數(shù)。正是這個(gè)原因,與單相機(jī)影像的數(shù)據(jù)處理不同,多相機(jī)影像內(nèi)業(yè)數(shù)據(jù)處理的相機(jī)內(nèi)參數(shù)部分將會被重新考慮,那么怎樣構(gòu)建相應(yīng)的光束法平差模型就成為了空三加密的新問題。相機(jī)參數(shù)包含有內(nèi)方位元素和相機(jī)的畸變參數(shù)。單相機(jī)光束法中這部分參數(shù)的平差模型矩陣塊將在多相機(jī)光束法平差中重新配置,多套相機(jī)參數(shù)的光束法平差是一種新的解題思路。分析傳統(tǒng)光束法解算模型,將相機(jī)參數(shù)的表達(dá)分解為不同的解算矩陣模塊使得多相機(jī)的光束法解算成為可能。本文將以此為研究出發(fā)點(diǎn),提出多相機(jī)數(shù)碼影像的光束法解算,并結(jié)合試驗(yàn)數(shù)據(jù),對解算成果進(jìn)行分析。
1附加參數(shù)的多相機(jī)光束法平差模型
光束法區(qū)域網(wǎng)平差以共線條件方程為基礎(chǔ)[4],以每張像片所組成的一束光線作為平差計(jì)算的基本單元[5],普通數(shù)碼相機(jī)存在徑向畸變差和切向畸變差兩類系統(tǒng)誤差,加入附加參數(shù)[6]補(bǔ)償系統(tǒng)誤差可提高平差解算精度[7]。
畸變差由如下多項(xiàng)式表達(dá):
(1)

將以上畸變差改正多項(xiàng)式帶入共線方程可得
(2)

根據(jù)以上共線方程式,像點(diǎn)坐標(biāo)視作觀測值,考慮相機(jī)的內(nèi)方位元素、畸變系數(shù)以及各片外方位元素參數(shù)為未知數(shù),其誤差方程式可表示為
(3)
式中:ΔXS,ΔYS,ΔZS,Δφ,Δω,Δκ為像片外方位近似值改正數(shù);Δx0,Δy0,Δf為內(nèi)方位近似值改正數(shù);Δk1,Δk2,Δp1,Δp2為畸變系數(shù)近似值改正數(shù);ΔX,ΔY,ΔZ為物方坐標(biāo)近似值改正數(shù)。
單相機(jī)光束法誤差方程式的矩陣形式[8-9]為
V=AX+BZ+Ct-L.
(4)
式中:X表示像片外方位近似值改正數(shù)矩陣,Z表示內(nèi)方位和畸變系數(shù)近似值改正數(shù)矩陣,C表示物方坐標(biāo)近似值改正數(shù)矩陣。
將以上式子,按像點(diǎn)數(shù),像片數(shù)展開得
(5)
按以上矩陣構(gòu)建規(guī)律,可以推得多相機(jī)光束法誤差方程式的矩陣結(jié)構(gòu)為
(6)
為不破壞誤差方程式的單一性和法方程式的帶狀結(jié)構(gòu),同時(shí)顧及到外業(yè)點(diǎn)已知坐標(biāo)誤差的影響,可把已知的外業(yè)坐標(biāo)也按觀測值加入坐標(biāo)改正數(shù)。因此,控制點(diǎn)按檢查點(diǎn)的誤差方程式的形式列立附加誤差方程式,即
(7)
式中:viX,viY,viZ為控制點(diǎn)坐標(biāo)誤差改正數(shù),ΔXi,ΔYi,ΔZi為控制點(diǎn)坐標(biāo)近似值改正數(shù)。
則帶附加方程的多相機(jī)光束法平差誤差方程式為
(8)

將外方位、內(nèi)方位、畸變系數(shù)改正數(shù)用統(tǒng)一矩陣表示,可將法方程式整體概括為
(9)
式中:Δ1表示各像片相機(jī)參數(shù)改正數(shù)向量,包含X′,Z′向量。Δ2表示各點(diǎn)地面坐標(biāo)的改正數(shù)向量,包含向量t′。
2實(shí)驗(yàn)與分析
本次試驗(yàn)的攝影目標(biāo)為室內(nèi)精密三維控制場,控制場分為3個(gè)層面,第1層在最前面,第2、3層依次向后。在控制場上共有47個(gè)點(diǎn),可根據(jù)實(shí)驗(yàn)方案設(shè)計(jì)選擇不同的控制條件和檢查點(diǎn),第1層點(diǎn)號:101~117,第2層點(diǎn)號:203~213,第3層點(diǎn)號:301~319,點(diǎn)位均勻分布。
實(shí)驗(yàn)分別采用Canon G5,Canon 5D和Canon G1X 3種不同型號的普通數(shù)碼相機(jī)獲取影像數(shù)據(jù)。拍攝焦距G5為7 mm,G1X為15 mm,5D為15 mm。拍攝為近距離拍攝,多相機(jī)攝影方式與普通單相機(jī)攝影測量拍攝方式一樣,在獲取下一張影像時(shí)換另一臺相機(jī)即可。
實(shí)驗(yàn)1:
兩不同相機(jī)與單相機(jī)實(shí)驗(yàn)對比,采用Canon G5(左片)和Canon G1X(右片),單相機(jī)(左/右片)采用Canon G5。
以下兩種方案拍攝環(huán)境、條件均一樣,在不同的控制條件下進(jìn)行。
方案1:當(dāng)控制點(diǎn)較多,控制條件較好時(shí),選擇29個(gè)控制點(diǎn),10個(gè)檢查點(diǎn),在3個(gè)控制層面上均勻選擇點(diǎn)位。
方案2:控制點(diǎn)較少,控制條件一般,選擇9個(gè)控制點(diǎn),10個(gè)檢查點(diǎn),在3個(gè)控制層面上均勻選擇點(diǎn)位。
實(shí)驗(yàn)計(jì)算結(jié)果如表1、表2所示。

表1 相機(jī)參數(shù)解算結(jié)果
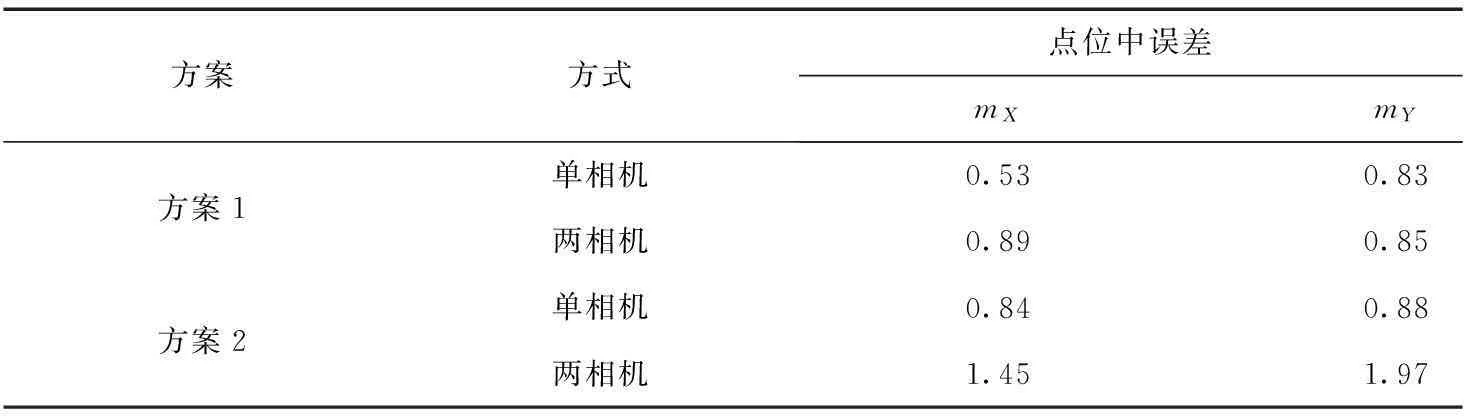
表2 檢查點(diǎn)坐標(biāo)中誤差 mm
實(shí)驗(yàn)2:
采用3個(gè)不同相機(jī)獲取的影像帶入多相機(jī)光束法算法中計(jì)算,采用Canon G5(左片)、Canon 5D(中片)和Canon G1X(右片),同樣采用兩種方案。
方案1:選擇9個(gè)控制點(diǎn),16個(gè)檢查點(diǎn),在3個(gè)控制層面上均勻選擇點(diǎn)位。
方案2:選擇28個(gè)控制點(diǎn),16個(gè)檢查點(diǎn),在3個(gè)控制層面上均勻選擇點(diǎn)位。
實(shí)驗(yàn)結(jié)果如表3、表4所示。
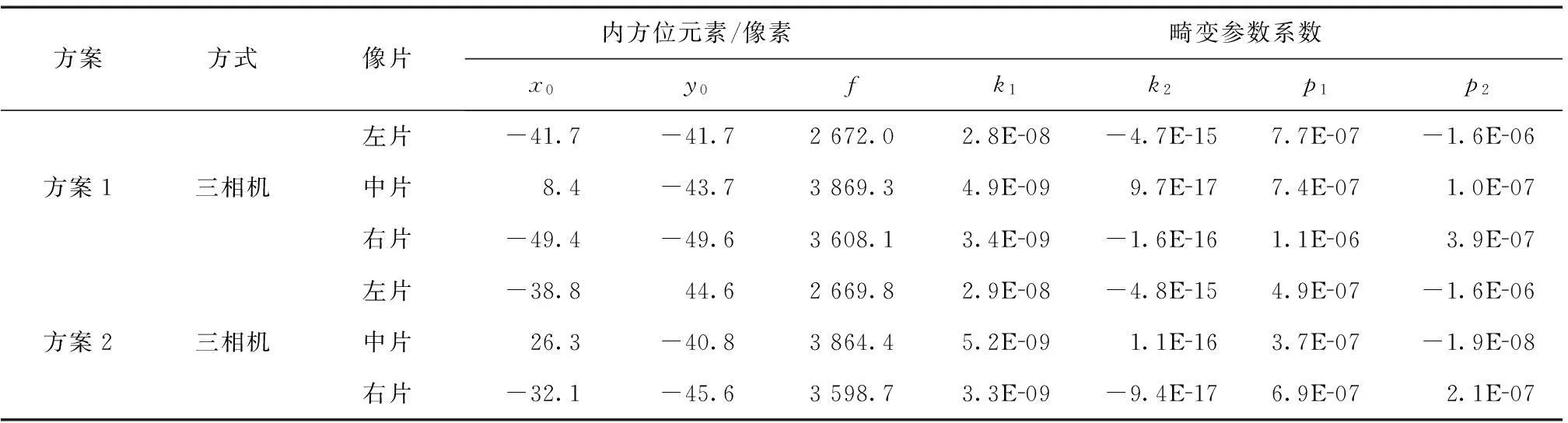
表3 相機(jī)參數(shù)解算結(jié)果

表4 檢查點(diǎn)坐標(biāo)中誤差 mm
以上兩組實(shí)驗(yàn)已驗(yàn)證附加參數(shù)的多相機(jī)光束法可解算得到各相機(jī)的相機(jī)參數(shù)以及加密點(diǎn)坐標(biāo)。從兩種方案的檢查點(diǎn)坐標(biāo)中誤差可以看出,在相同的條件下,多相機(jī)解算結(jié)果與單相機(jī)解算結(jié)果精度相當(dāng),單從多相機(jī)計(jì)算結(jié)果可知,不同條件下的兩種方案,當(dāng)控制點(diǎn)較少時(shí),點(diǎn)位誤差較大。
此兩組實(shí)驗(yàn)已經(jīng)證明多相機(jī)光束法解算是可行的,且能正確計(jì)算出物方點(diǎn)坐標(biāo),但能否很好地解算相機(jī)參數(shù),需要進(jìn)一步驗(yàn)證。
驗(yàn)證方案為:假設(shè)解算出來的相機(jī)參數(shù)(每個(gè)相機(jī)的3個(gè)內(nèi)方位,4個(gè)畸變系數(shù))為已知值應(yīng)用,按照嚴(yán)密空間后方交會,解算出來各片外方位元素,再經(jīng)過多片前方交會,直接解算出作為驗(yàn)證的控制點(diǎn)的解算坐標(biāo)與實(shí)際坐標(biāo)比較,即可分析相機(jī)參數(shù)的正確性。
按照驗(yàn)證方案的設(shè)計(jì),對之前實(shí)驗(yàn)1的兩種方案做進(jìn)一步探討,驗(yàn)證不同相機(jī)的內(nèi)方位及畸變參數(shù)可以在多相機(jī)光束法中得到正確解算。驗(yàn)證共采用14個(gè)已知物方坐標(biāo)的點(diǎn)作為驗(yàn)證點(diǎn),兩種方案驗(yàn)證結(jié)果如表5所示。
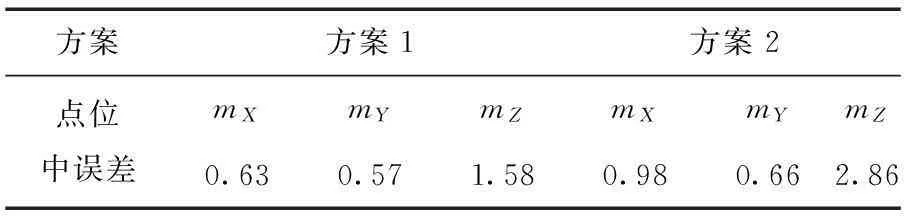
表5 驗(yàn)證點(diǎn)坐標(biāo)中誤差 mm
經(jīng)以上驗(yàn)證方案驗(yàn)證,兩組實(shí)驗(yàn)方案解算得到的驗(yàn)證點(diǎn)點(diǎn)位中誤差在交會方向Z向較大,在3 mm內(nèi)。在控制條件一般時(shí)仍能在X,Y方向得到較精確的三維點(diǎn)位坐標(biāo)數(shù)據(jù),誤差在1 mm以內(nèi)。經(jīng)驗(yàn)證多相機(jī)數(shù)碼影像光束法整體平差解算得到的相機(jī)參數(shù)結(jié)果具有良好精度。
綜合以上實(shí)驗(yàn)可以得到,多相機(jī)數(shù)碼影像光束法需要考慮到各相機(jī)所對應(yīng)的各自相機(jī)參數(shù)參與平差過程,光束法解算可得到各相機(jī)的相機(jī)參數(shù)及加密點(diǎn)點(diǎn)位坐標(biāo),檢查點(diǎn)解算結(jié)果與同樣條件下的單相機(jī)光束法結(jié)算結(jié)果精度相當(dāng),經(jīng)進(jìn)一步驗(yàn)證,多相機(jī)光束法解算的各相機(jī)參數(shù)結(jié)果精度良好。
3結(jié)束語
通過附加多套相機(jī)參數(shù)的光束法進(jìn)行整體平差解算,可以得到各相機(jī)所對應(yīng)的相機(jī)參數(shù),同時(shí)解算出正確的加密點(diǎn)的物方坐標(biāo),并經(jīng)進(jìn)一步驗(yàn)證可以檢驗(yàn)解算出的相機(jī)參數(shù)精度良好,多相機(jī)的光束法解算的可行性得到初步驗(yàn)證。本實(shí)驗(yàn)是對于兩個(gè)不同相機(jī)的驗(yàn)證,對于影響精度的因素以及兩個(gè)以上相機(jī)的光束法算法,以及解算速度和精度的提高方法可作為下一步的研究方向進(jìn)行探討。
參考文獻(xiàn):
[1]馮文灝.近景攝影測量[M].武漢:武漢大學(xué)出版社,2002.
[2]張曼祺,李浩,陳新璽.普通數(shù)碼影像的光束法算法探討[J].測繪通報(bào),2006(6):10-12.
[3]陳建華,張雷,阮善發(fā).非量測相機(jī)同步攝影控制器[J].南京工業(yè)大學(xué)學(xué)報(bào):自然科學(xué)版,2003,25(5):92-94.
[4]鄒瑜,雷蓉,紀(jì)松,等.地面幾何標(biāo)定的定向片自檢校光束法區(qū)域網(wǎng)平差模型[J].測繪工程,2012,21(5):8-12.
[5]何輝明,胡伍生,王克宇.攝影測量光束法加密精度的分析[J].測繪通報(bào),2004(2):13-15.
[6]李德仁.自檢校光束法區(qū)域網(wǎng)平差的相關(guān)分析和附加參數(shù)顯著性檢驗(yàn)[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,1981,6(2):46-64.
[7]TSAI V J.Automatic Photo Reordering in a Simultaneous Bundle Adjustment [J].PE&RS,1995,1(7):899-908
[8]王建梅,朱紫陽.利用已有像控點(diǎn)的多期航空影像光束法區(qū)域網(wǎng)聯(lián)合平差[J].測繪學(xué)報(bào),2010,39(1):22-27.
[9]袁修孝,季順平,謝酬.基于已知定向參數(shù)影像的光束法區(qū)域網(wǎng)平差[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2005,30(11):955-959.
[責(zé)任編輯:劉文霞]

