機載多掃描氣象雷達的目標垂直輪廓重建?
2016-01-10 06:51:24李銀斌
雷達科學與技術 2016年1期
李銀斌,李 勇,何 力
(1.雷達成像與微波光子技術教育部重點實驗室(南京航空航天大學),江蘇南京210016;2.南京航空航天大學電子信息工程學院,江蘇南京210016)
0 引言
機載氣象雷達是飛機的眼睛,能夠有效地探測飛機運動前方雷暴、暴雨、颮線、冰雹等災害性天氣,為安全飛行提供保障,已經成為民航客機、運輸機等大飛機必不可少的電子設備。機載氣象雷達的重要價值主要體現在對氣象目標的連續探測和數據的實時處理、顯示,通過分析、處理航路前方氣象目標回波數據,將前方氣象狀況用清晰的圖像顯示出來,并將危害天氣狀況的警報信息及時提供給飛行員。
目前,大多數機載氣象雷達采用單一的方位向掃描,得到的氣象回波數據不足,所以通常僅能夠對氣象目標水平面或者傾斜面進行成像分析。為了給飛行員提供包括垂直厚度及強度分布在內的更為全面的氣象目標狀態信息,新型機載氣象雷達采用多掃描模式和距離高度顯示器以實現對氣象目標垂直輪廓探測與成像[1-2]。
本文針對現有技術的缺陷,提出了基于先驗模型的機載氣象雷達目標垂直輪廓重建方法,利用多掃描機載氣象雷達獲取至少8層的氣象目標數據,實現對飛機前方氣象目標垂直輪廓的顯示,快速、準確、全面地反映出氣象目標雷達反射率因子在高度維的強度變化與分布范圍。
1 問題描述
機載氣象雷達需要實時快速地獲取前方氣象狀態分布情況。在傳統應用中由于受到計算機實時處理能力以及天線掃描的限制,通常雷達采用方位扇掃工作模式,從而快速獲得載機前方水平范圍內的氣象分布情況。隨著計算機處理能力水平的提高,以及雷達伺服系統和天線掃描能力的提高,為了能夠通過雷達回波數據更加直觀地呈現出諸如降水云等氣象目標的垂直剖面分布信息[3],氣象雷達通常采用RHI掃描方式,即固定氣象雷達方位角,在有限下俯角情況時對氣象目標進行垂直掃描,也可以稱為多掃描工作模式。這種掃描方式可以提高飛機的安全性能和氣象雷達對災害性天氣的觀測能力,同時能夠獲取前方氣象目標的三維分布情況,為氣象信息處理提供了更多、更詳盡的基礎數據[4]。
本文中機載氣象雷達主要采用RHI掃描方式,為了滿足其實時、快速、有效地處理回波信號,實現氣象目標垂直輪廓的重建,機載氣象雷達需要在至少8層的波束多掃描模式下工作,探測得到足夠的氣象目標信息作為重建的基數據。載機一般飛行在十幾公里的高度上,降水云等氣象目標一般在其視線下方,所以機載氣象雷達通常處于下視的工作狀態。機載氣象雷達進行8層波束多掃描的示意圖如圖1所示。
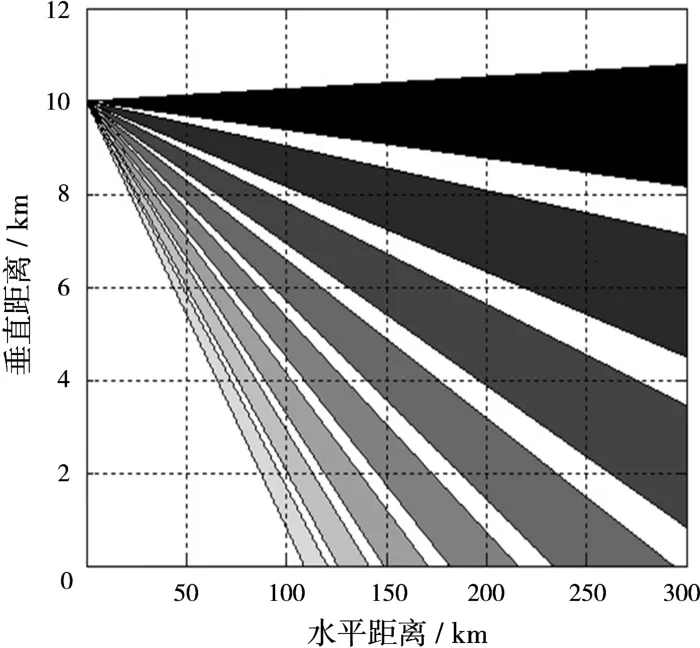
圖1 機載氣象雷達波束多掃描模式
在圖1中,載機飛行在10 km高度上,氣象雷達處于下視工作狀態,天線固定方位角,分別在0.1°,0.8°,1.5°,2.2°,2.9°,3.6°,4.3°和5°的下俯角情況進行探測。
在以上參數情況下,對前方150 km處降水云的氣象回波成像如圖2所示。
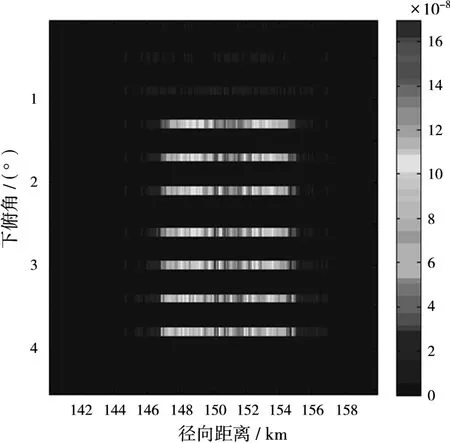
圖2 局部回波成像
圖2是截取雷達回波徑向距離140 km到160 km范圍信息進行的放大顯示。
從圖2可知,要想獲取氣象目標垂直輪廓信息,需要找到一種重建方法,能夠根據這10層回波數據盡量真實地還原每層回波數據之間缺失的氣象信息,最終實現氣象目標垂直輪廓的重建。
2 降水云模型的建立
降水云垂直輪廓重建是在多掃描氣象回波仿真基礎上進行的,本文中以降水云作為多掃描機載氣象雷達的探測目標,并在載機正前方對其進行10層多掃描。降水云三維物理模型[5]及其云層中心反射率因子參照降水云在大陸平原上統計變化規律[6-7],如圖3、圖4所示。
3 反射率因子的獲得與校正
目標垂直輪廓重建的核心在于機載氣象雷達掃描回波信息中各層降水云反射率因子的獲得和校正[8-10],本文提出的方法中首先獲取多掃描機載氣象雷達探測到的正前方10層降水云初始回波信息,即氣象雷達正前方位上各個下俯角隨探測距離的回波功率。然后根據回波功率估計出10層降水云反射率因子。p ij是第i個下俯角情況時第j個距離單元的回波功率。如果不考慮天線增益不均勻以及傳播衰減等因素的影響,可以用式(1)估算該距離單元上的反射率因子Z ij。

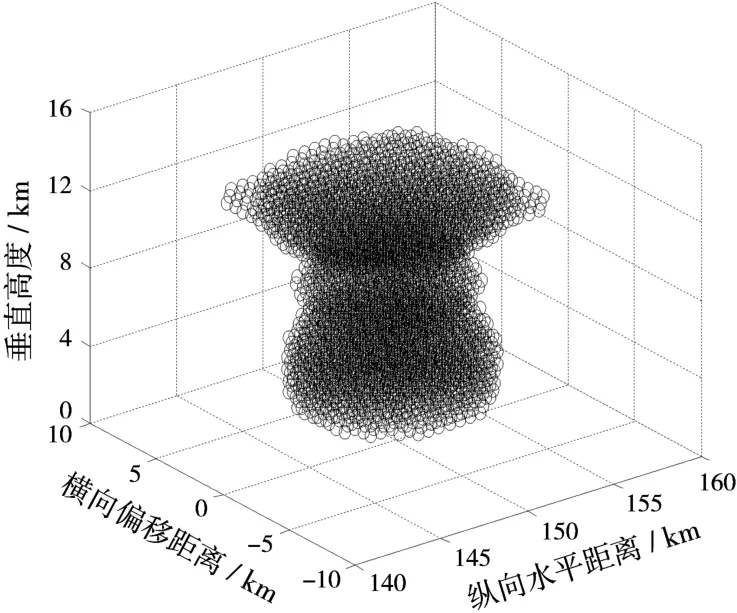
圖3 降水云三維模型
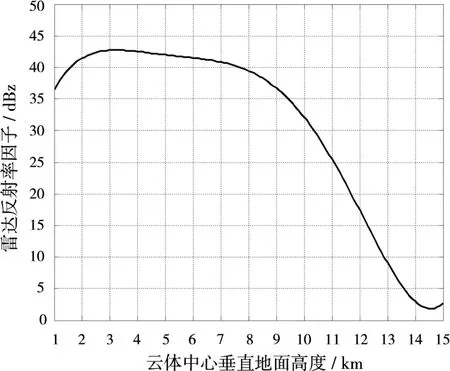
圖4 降水云中心反射率因子隨高度變化曲線
式中:Pt為雷達發射功率;G0為天線波束中心方向上的增益;|K|2為由散射粒子介電性質決定的常數,對于水取值0.93;λ為雷達波長;R ij為第i個下俯角情況時第j個距離單元與氣象雷達間的距離。將載機正前方各層反射率因子從極坐標轉換為按照水平距離和垂直高度存儲的直角坐標系。
機載氣象雷達在斜距R i、方位角θi、下俯角φi處的雷達反射率因子為Z(R i,θi,φi)。在載機正前方方位角θi等于0。載機飛行高度為hp,地球半徑為Re,那么該處在空間上距離地面高度H i為

同時,該處距離載機在空間上的水平距離L i和偏離載機飛行正前方的水平距離W i分別為
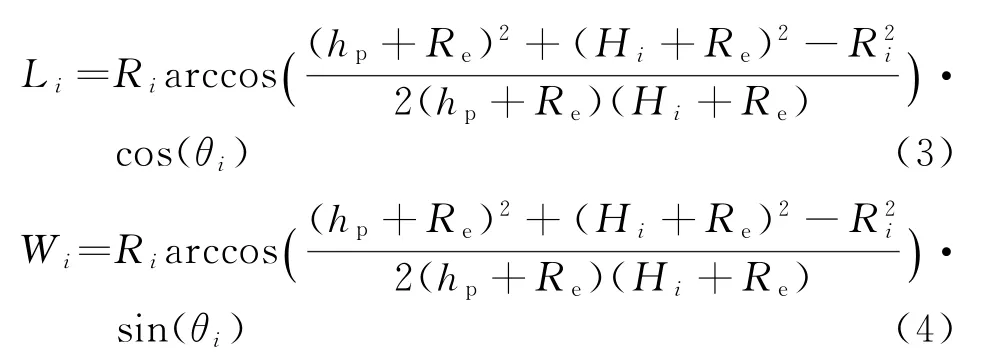
此時載機正前方W i=0。
在直角坐標系下建立的三維網格數據中,水平分辨距離為ΔL,垂直分辨距離為ΔH。那么Z(R i,θi,φi)在三維網格中位置為(x i,y i,z i),其中:

此時在載機正前方上y i=0。經過這個步驟,實現將極坐標下反射率因子轉換為直角坐標下的三維網格數據,為降水云垂直輪廓重建提供數據基礎。從網格數據中找出載機正前方10層降水云范圍內與氣象雷達的最近邊界和最遠邊界位置,以及各層降水云的中心位置。
將降水云反射率因子高度分布的先驗統計變化模型逼近已知10層降水云中心反射率因子,從而得到經過修正后的降水云中心反射率因子變化曲線。
選取網格數據中相鄰的第i層和第i+1層反射率因子,第i層最近邊界和最遠邊界與氣象雷達的距離分別是R i1和R i2,第i+1層最近邊界和最遠邊界與氣象雷達的距離分別是R(i+1)1和R(i+1)2,那么兩層降水云分別在邊界內利用最小二乘法擬合得到反射率因子隨距離的變化曲線,并用其中心反射率因子進行歸一化處理,得到Z i(r)和Z i+1(r)。機載氣象雷達估計第i層和第i+1層降水云的中心位置可能有偏差,并不一定在同一垂直方向上。根據兩層中心距離R i0和R(i+1)0,將歸一化曲線Z i(r)和Z(i+1)(r)分別變換到(R i1-R i0,R i2-R i0)和(R(i+1)1-R(i+1)0,R(i+1)2-R(i+1)0)范圍內。
第i層和第i+1層降水云的垂直高度分別是H i和H i+1,垂直分辨距離為ΔH,可以計算出兩云層垂直方向上共有n個距離分辨單元,其中n=
(H i+1-H i)/ΔH。從k=1開始選擇第k個距離單元,其所在云層反射率因子隨距離變化的歸一化曲線可以利用Z i(r)和Z(i+1)(r)經過線性插值得到,如式(6)。

其范圍在min(R i1-R i0,R(i+1)1-R(i+1)0)和max(R i2-R i0,R(i+1)2-R(i+1)0)之間。
利用式(7)和式(8)分別求出第k個垂直距離單元所在云層高度~H k以及中心水平距離R k0,然后根據修正后降水云的中心反射率因子變化曲線估算出該層中心反射率因子Z k。

選取兩層氣象目標之間其他垂直分辨距離上高度層,自下而上地逐層求出兩層之間所有垂直分辨單元上的目標反射率因子值。然后選取任意一組相鄰兩層氣象目標反射率因子作為輸入數據,自下而上地對全部多掃描回波數據進行處理,恢復出任意相鄰兩層氣象目標間所有垂直分辨單元上的目標反射率因子值,最終實現氣象目標垂直輪廓重建,如圖5所示。
4 算法仿真結果
本次仿真實驗參數如表1所示。
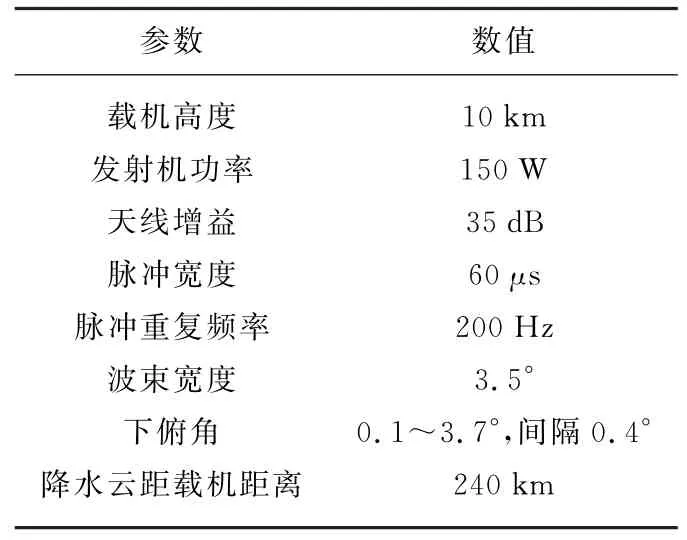
表1 仿真參數
在150 km處建立的降水云模型垂直剖面,如圖6所示,其反映了降水云內部雷達反射率因子的強度與分布。從圖中可以看出降水云中心強度最大,逐漸向兩邊減弱,且降水云底部強度比頂部大得多。
圖7反映了在載機正前方方位向上氣象雷達探測到10層降水云的雷達反射率因子信息,但這對了解氣象目標的垂直輪廓信息明顯是不夠的。因此,需要根據已經估算得到的10層降水云雷達反射率因子大小,繼續估計出相鄰兩層之前缺失的氣象信息,在盡可能不失真的情況下重建出氣象目標垂直剖面。
圖8將最靠近地面的相鄰兩云層間的氣象目標垂直信息重建出來。為了得到完整的氣象目標垂直輪廓信息,還需要選取其他云層重復上述過程。
圖9為得到的載機飛行正前方方向的氣象目標垂直輪廓,與圖6降水云垂直輪廓模型比較,可以看出重建得到的降水云垂直輪廓與原始輪廓基本符合。
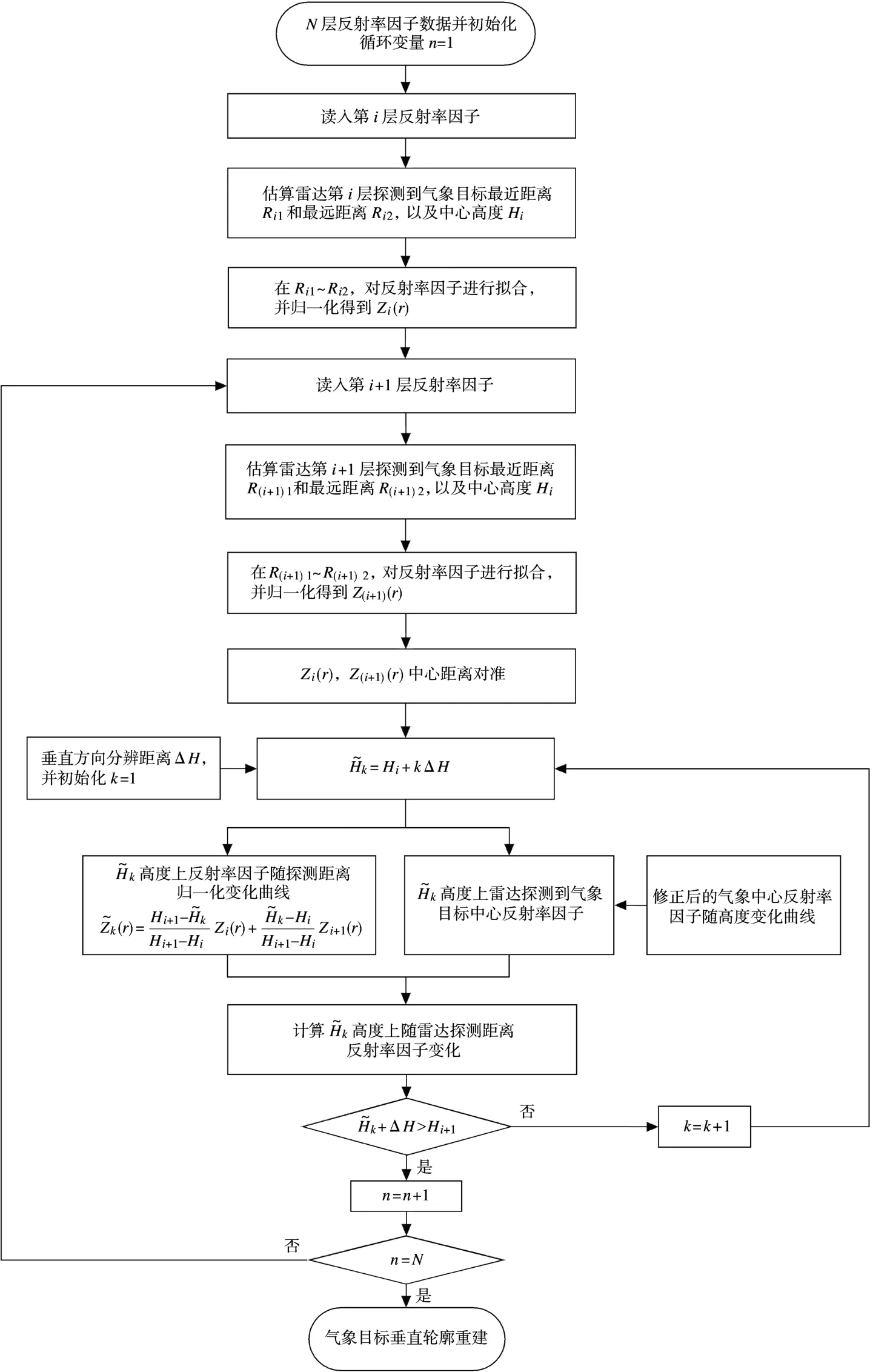
圖5 降水云垂直輪廓重建流程
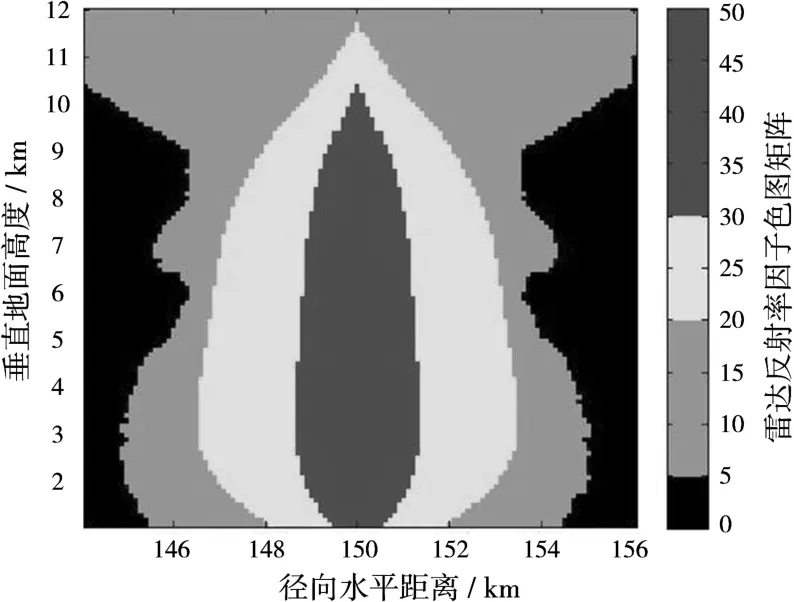
圖6 降水云垂直輪廓模型
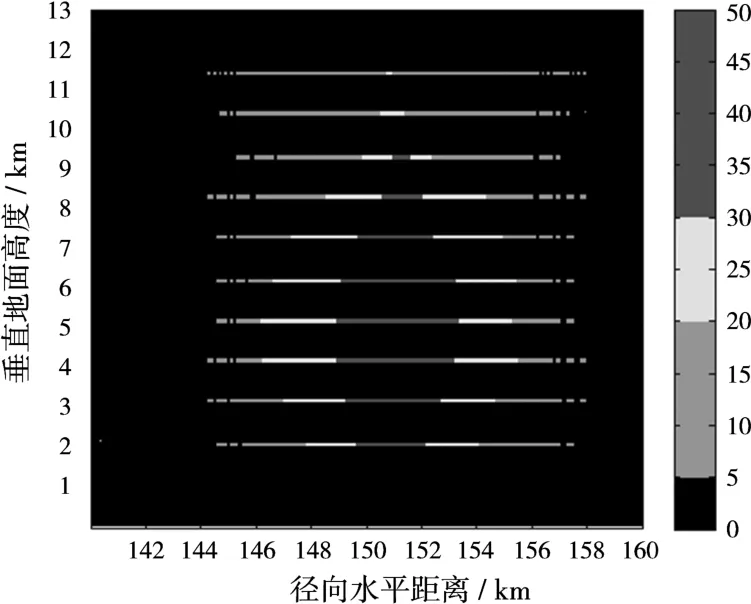
圖7 直角坐標下10層降水云反射率因子
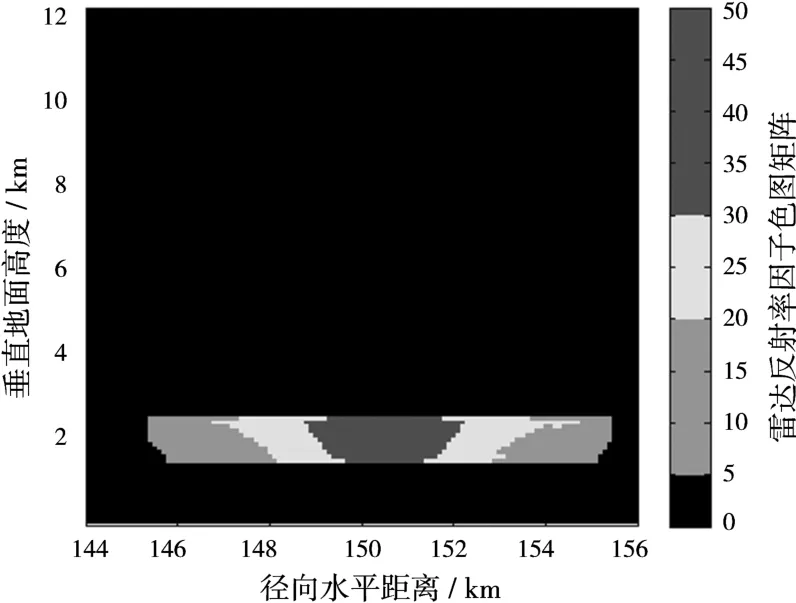
圖8 相鄰兩層垂直輪廓重建結果
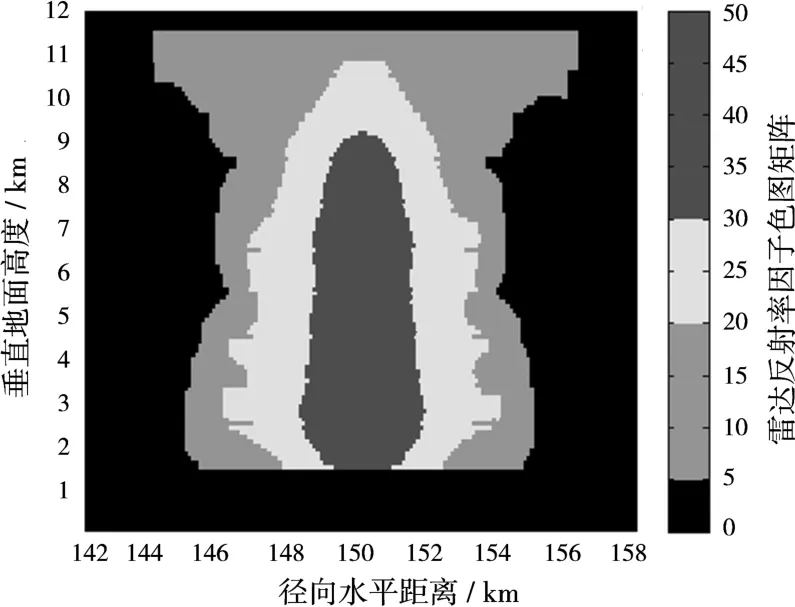
圖9 載機正前方降水云垂直輪廓重建結果
5 結束語
為了進一步保證飛機航線的安全,需要更全面、更清楚地了解飛行前方氣象目標的分布情況。在機載氣象雷達多掃描工作模式下,本文研究了一種基于先驗模型的氣象目標垂直輪廓重建方法,并進行了仿真驗證。
本文詳細介紹了利用機載氣象雷達多掃描過程得到氣象回波數據進行氣象目標垂直輪廓重建的流程,包括氣象數據的坐標系轉換、回波數據擬合和插值等一系列處理。通過與氣象目標垂直輪廓理論模型比較,驗證了該重建方法的正確性以及有效性。
[1]張培昌,杜秉玉,戴鐵丕.雷達氣象學[M].北京:氣象出版社,2001.
[2]吳仁彪,盧曉光,李海,等.機載前視風切變檢測氣象雷達的研究進展[J].數據采集與處理,2014,29(4):496-507.
[3]葛亮.強對流云體垂直剖面序列的構建與三維可視化方法研究[D].天津:天津大學,2010.
[4]王玉麗,趙永嘉.復雜多變環境下機載雷達目標探測模型的建立[J].系統仿真學報,2013,25(12):2833-2839.
[5]段化軍.機載氣象雷達回波信號模擬與地雜波抑制方法研究[D].南京:南京航空航天大學,2011.
[6]莊健,朱岱寅.機載氣象雷達下和差波束抑制地雜波研究[J].雷達科學與技術,2014,12(2):138-142.ZHUANG Jian,ZHU Daiyin.Ground Clutter Suppression for Airborne Weather Radar Based on Sum and Difference Beam[J].Radar Science and Technology,2014,12(2):138-142.(in Chinese)
[7]王紅光,章晗,吳振森.多普勒天氣雷達反常地物回波模擬研究[J].電子與信息學報,2013,35(12):2863-2867.
[8]趙恒軒,陳鐘榮,周楓.天氣雷達反射率因子的實時衰減訂正[J].高原氣象,2004,22(4):366-370.
[9]何力.波束多掃描機載氣象雷達信號處理技術研究[D].南京:南京航空航天大學,2014.
[10 VIGNAL B,GALLI G,JOSS J,et al.Three Methods to Determine Profiles of Reflectivity from Volumetric Radar Data to Correct Precipitation Estimates[J].Journal of Applied Meteorology,2000,39(10):1715-1726.