基于雷達(dá)實(shí)裝數(shù)據(jù)的點(diǎn)跡模擬器設(shè)計(jì)?
2016-01-10 06:51:26鈕俊清任清安朱明清
雷達(dá)科學(xué)與技術(shù) 2016年1期
關(guān)鍵詞:信息
鈕俊清,任清安,朱明清
(1.中國電子科技集團(tuán)公司第三十八研究所,安徽合肥230088;2.孔徑陣列與空間探測安徽省重點(diǎn)實(shí)驗(yàn)室,安徽合肥230088;3.智能情報處理重點(diǎn)實(shí)驗(yàn)室,安徽合肥230088)
0 引言
近年來,隨著雷達(dá)技術(shù)不斷發(fā)展,雷達(dá)模擬器在雷達(dá)應(yīng)用中得到廣泛的應(yīng)用[1-5],大部分雷達(dá)模擬器采用硬件和軟件相結(jié)合的半實(shí)物仿真方式,但這類設(shè)計(jì)費(fèi)用較高,對雷達(dá)數(shù)據(jù)處理(航跡處理、顯控、波束調(diào)度)等軟件的調(diào)試不夠靈活。
點(diǎn)跡模擬器采用純軟件的方式模擬實(shí)裝雷達(dá)DSP處理后的凝聚點(diǎn)跡,包括目標(biāo)點(diǎn)跡、雜波點(diǎn)跡(海雜波、地雜波、云雨雜波)、干擾點(diǎn)跡、目標(biāo)點(diǎn)跡、雜波區(qū)域、干擾區(qū)域等信息,且設(shè)置靈活,可以充分驗(yàn)證雷達(dá)軟件的以下性能:
1)航跡處理性能:點(diǎn)跡處理能力、航跡處理能力、機(jī)動目標(biāo)跟蹤能力、雜波起始能力和抗干擾能力等;
2)顯控性能:點(diǎn)跡顯示能力、航跡顯示能力和戰(zhàn)術(shù)操作能力等;
3)波束調(diào)度性能:事件調(diào)度成功率、時間利用率等。
但現(xiàn)有的點(diǎn)跡模擬器有很大的缺陷:①雜波/干擾的仿真和真實(shí)情況的差距較大;②雷達(dá)掃描波束的仿真與雷達(dá)實(shí)際工作方式差距較大,特別是相控陣?yán)走_(dá);③運(yùn)動平臺的姿態(tài)信息的仿真和真實(shí)雷達(dá)的平臺差距較大。同時真實(shí)的雷達(dá)點(diǎn)跡數(shù)據(jù)也有缺陷:①目標(biāo)類型比較單一,大多數(shù)為民航飛機(jī);②目標(biāo)運(yùn)動模型比較簡單,很少出現(xiàn)編隊(duì),交叉等飛行的目標(biāo);③大多數(shù)目標(biāo)很難獲得GPS數(shù)據(jù);④雜波區(qū)域比較固定,缺少不同類型的干擾數(shù)據(jù)。
為了解決以上問題,本文以雷達(dá)的真實(shí)數(shù)據(jù)(包括時統(tǒng)、平臺、波束)代替雷達(dá)點(diǎn)跡模擬器的平臺、波束信息,并通過場景編輯軟件中設(shè)置目標(biāo)、雜波、干擾、隨機(jī)目標(biāo)等參數(shù)實(shí)現(xiàn)真實(shí)的雷達(dá)點(diǎn)跡上的雜波、干擾、目標(biāo)/隨機(jī)目標(biāo)的任意疊加,對雷達(dá)數(shù)據(jù)處理軟件的功能和性能進(jìn)行充分的測試。
1 雷達(dá)點(diǎn)跡模擬器設(shè)計(jì)
1.1 軟件組成及功能
雷達(dá)點(diǎn)跡模擬器軟件系統(tǒng)組成如圖1所示。
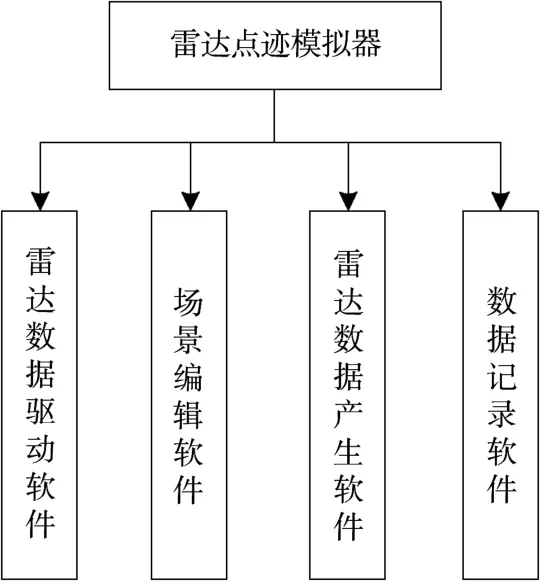
圖1 雷達(dá)點(diǎn)跡模擬器軟件組成
雷達(dá)模擬器的軟件功能如下:
1)雷達(dá)數(shù)據(jù)驅(qū)動軟件
雷達(dá)數(shù)據(jù)驅(qū)動軟件主要完成以下功能:
(a)仿真控制:對整個模擬器進(jìn)行仿真開始、結(jié)束等控制;
(b)時統(tǒng):對整個系統(tǒng)進(jìn)行時統(tǒng);
(c)波束統(tǒng)一:整個系統(tǒng)掃描波束保持一致;
(d)平臺統(tǒng)一:對整個系統(tǒng)的平臺位置等信息與實(shí)際雷達(dá)采集的平臺信息一致;
(e)點(diǎn)跡信息:將點(diǎn)跡信息發(fā)送到航跡處理。
2)場景編輯軟件
場景編輯軟件主要完成以下功能:
(a)目標(biāo)設(shè)置:根據(jù)需求設(shè)置不同目標(biāo)及運(yùn)動軌跡;
(b)雜波/干擾設(shè)置:根據(jù)要求設(shè)置雜波的等級以及干擾個數(shù)和區(qū)域,以及區(qū)域的形狀;
(c)設(shè)置隨機(jī)目標(biāo)數(shù)。
3)雷達(dá)數(shù)據(jù)產(chǎn)生軟件
(a)雜波/干擾:根據(jù)接收到的波束位置及雜波/干擾信息,產(chǎn)生雜波和干擾點(diǎn),發(fā)送到航跡處理軟件,并在顯示界面顯示;
(b)目標(biāo)點(diǎn)跡解算:根據(jù)接收到的波束位置和目標(biāo)的位置信息,以及雷達(dá)的參數(shù)(比如波束寬度、檢測概率、由GIS信息計(jì)算的地形遮擋等),解算目標(biāo)的點(diǎn)跡信息,并發(fā)送到航跡處理軟件,并在顯示界面顯示;
(c)產(chǎn)生隨機(jī)目標(biāo):根據(jù)接收到的隨機(jī)目標(biāo)的個數(shù),初始化目標(biāo)的參數(shù),包括位置、速度、航向、運(yùn)動模型等。
4)數(shù)據(jù)記錄軟件
將波束調(diào)度的信息、目標(biāo)的真值、目標(biāo)的航跡保存到數(shù)據(jù)庫里,作為航跡處理評估、波束調(diào)度評估的基礎(chǔ)數(shù)據(jù),同時可以將記錄的數(shù)據(jù)進(jìn)行重演。
1.2 軟件的處理流程
雷達(dá)點(diǎn)跡模擬器軟件處理流程如圖2所示。其中左側(cè)為實(shí)裝雷達(dá)軟件,右側(cè)為模擬器。
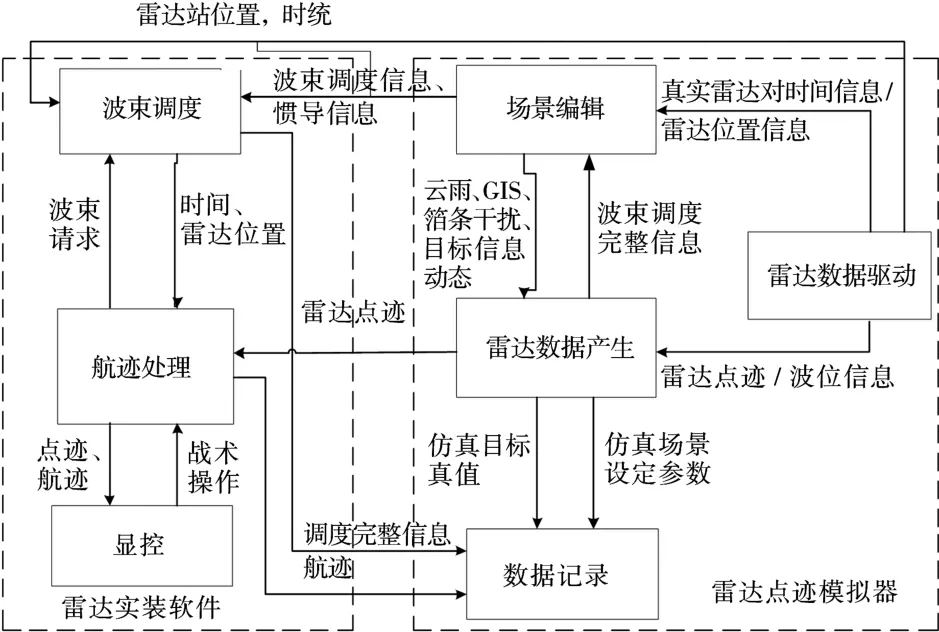
圖2 雷達(dá)點(diǎn)跡模擬器軟件處理流程
首先場景編輯軟件,根據(jù)雷達(dá)站的位置進(jìn)行如下信息的設(shè)置:①設(shè)置目標(biāo)的類型、參數(shù)和運(yùn)行軌跡;②設(shè)置雜波、干擾的范圍、形狀、強(qiáng)度和速度等參數(shù);③設(shè)置隨機(jī)目標(biāo)數(shù)。然后雷達(dá)數(shù)據(jù)驅(qū)動進(jìn)行仿真開始控制,并將雷達(dá)站的平臺信息、時統(tǒng)信息、雷達(dá)波束信息實(shí)時地發(fā)送到波束調(diào)度和場景編輯軟件。最后雷達(dá)數(shù)據(jù)產(chǎn)生軟件根據(jù)接收到的實(shí)時目標(biāo)的位置、平臺、雜波干擾、地形遮擋、發(fā)現(xiàn)概率等信息,解算雷達(dá)點(diǎn)跡發(fā)送到航跡處理、并把真值發(fā)送到數(shù)據(jù)記錄軟件。同時數(shù)據(jù)記錄軟件將目標(biāo)的真值、目標(biāo)的航跡信息及波束的調(diào)度信息保存在數(shù)據(jù)庫中,用于波束調(diào)度和航跡處理軟件性能評估。
2 雷達(dá)點(diǎn)跡模擬器關(guān)鍵算法
2.1 坐標(biāo)轉(zhuǎn)換
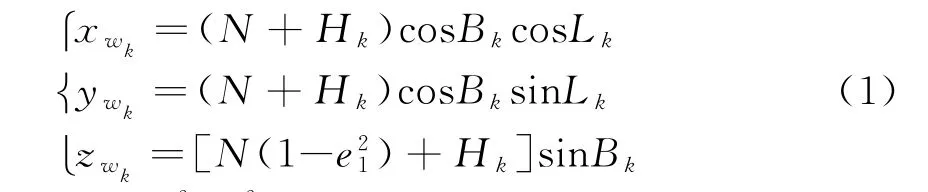
1)大地坐標(biāo)系轉(zhuǎn)WGS-84直角坐標(biāo)系
假設(shè)目標(biāo)的大地坐標(biāo)為(L k,B k,H k),轉(zhuǎn)換后的地心直角坐標(biāo)系坐標(biāo)為(x wk,y wk,z wk),轉(zhuǎn)化公式如下:
2)WGS-84直角坐標(biāo)系到地心直角坐標(biāo)系轉(zhuǎn)換
假設(shè)地面站的坐標(biāo)為(L r,B r,H r),地心直角坐標(biāo)為(x or,y or,z or),轉(zhuǎn)化公式如下:
故地心直角坐標(biāo)系轉(zhuǎn)換到站心坐標(biāo)系坐標(biāo)(x rk,y rk,z rk),轉(zhuǎn)化公式如下:
式中,

3)地面直角坐標(biāo)系轉(zhuǎn)換到地面球面坐標(biāo)系轉(zhuǎn)換
假設(shè)站心球面坐標(biāo)為(r k,θk,ηk),故由目標(biāo)的地面直角坐標(biāo)(x rk,y rk,z rk)轉(zhuǎn)化為地面極坐標(biāo)的(r k,θk,ηk)的坐標(biāo)變換為
2.2 關(guān)鍵參數(shù)計(jì)算
1)目標(biāo)點(diǎn)跡發(fā)現(xiàn)概率
對Swerling I類目標(biāo),計(jì)算雷達(dá)作用距離的方程如下式[6]所示:

根據(jù)雷達(dá)的參數(shù)表及目標(biāo)的RCS、求出目標(biāo)在發(fā)現(xiàn)概率為0.5時的最大距離Rmax,此時的信噪比SNR0,利用當(dāng)前目標(biāo)的位置R,求出當(dāng)前的信噪比如下式所示:

對Swerling I類目標(biāo),目標(biāo)點(diǎn)跡的發(fā)現(xiàn)概率與信雜噪比之間的關(guān)系如式(8)所示。

式中,P f0=10-6。
2)地形遮擋計(jì)算
首先根據(jù)雷達(dá)在距離R、方位θ和俯仰η上的威力,建立三維數(shù)據(jù)表(R i,θj,ηk),其中,

在場景編輯軟件接收到雷達(dá)站的位置,然后根據(jù)GIS數(shù)據(jù),計(jì)算建立的三維數(shù)據(jù)表(R i,θj,ηk)所對應(yīng)的遮蔽信息D i,j,k。
3)場景編輯技術(shù)
編輯復(fù)雜的戰(zhàn)場態(tài)勢,就要將數(shù)據(jù)和圖形結(jié)合起來進(jìn)行目標(biāo)軌跡的設(shè)計(jì)。在設(shè)計(jì)目標(biāo)運(yùn)動軌跡上,我們采用了“所畫即所得”方法,通過按住鼠標(biāo),在顯示器屏幕上繪制你所需要的軌跡圖,將軌跡像素點(diǎn)的屏幕坐標(biāo)轉(zhuǎn)化為經(jīng)緯度坐標(biāo),形成目標(biāo)的真值軌跡數(shù)據(jù),并通過運(yùn)動模型對軌跡進(jìn)行修正。目標(biāo)在模擬仿真的時候是按照真值航線運(yùn)動的,運(yùn)動的速度和高度可以人工設(shè)置。這樣做的好處就是目標(biāo)的運(yùn)動都是按照指定的軌跡,每次模擬的過程都是一致的。
3 應(yīng)用效果
3.1 仿真目標(biāo)疊加
考慮在雷達(dá)實(shí)際探測過程中可能遇到的情況,比如目標(biāo)編隊(duì)、高速高機(jī)動、雜波起始、穿雜波穩(wěn)定跟蹤、交叉飛行跟蹤等情況,在雷達(dá)真實(shí)數(shù)據(jù)上疊加這些目標(biāo)信息,其中編隊(duì)和穿雜波穩(wěn)定跟蹤性能測試的場景編輯如圖3所示,目標(biāo)疊加后航跡處理的顯示效果如圖4所示。
圖3 編隊(duì)目標(biāo)場景編輯
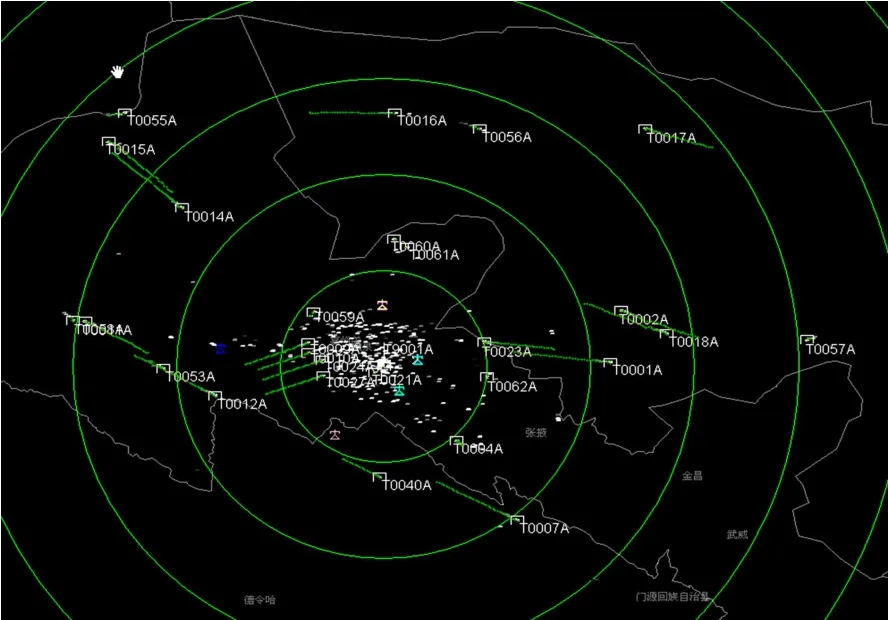
圖4 編隊(duì)穿雜波場景中的航跡處理效果
3.2 雜波干擾疊加
可以根據(jù)實(shí)際情況,在雷達(dá)的干凈區(qū)域的真實(shí)目標(biāo)附近疊加雨云等雜波和干擾,可以檢驗(yàn)航跡處理軟件真實(shí)目標(biāo)的雜波、干擾起始能力、穿雜波和干擾的能力、雜波干擾的抑制能力。加雜波區(qū)域的航跡處理效果如圖5所示。

圖5 疊加雜波場景中的航跡處理效果
3.3 隨機(jī)雜波和隨機(jī)目標(biāo)疊加
通過在真實(shí)雷達(dá)數(shù)據(jù)上疊加隨機(jī)目標(biāo)可以驗(yàn)證航跡處理軟件的航跡處理性能(比如600批/幀),疊加隨機(jī)雜波可以驗(yàn)證航跡穩(wěn)定跟蹤的性能。隨機(jī)雜波疊加和隨機(jī)目標(biāo)疊加如圖6和圖7所示。
圖6 疊加隨機(jī)雜波場景中的航跡處理效果
圖7 疊加隨機(jī)目標(biāo)場景中的航跡處理效果
4 結(jié)束語
本文針對當(dāng)前雷達(dá)點(diǎn)跡模擬器的缺陷和雷達(dá)數(shù)據(jù)處理軟件接口、性能和功能的測試要求,采用雷達(dá)真實(shí)數(shù)據(jù)和雷達(dá)點(diǎn)跡模擬器相結(jié)合的技術(shù),即以真實(shí)雷達(dá)的時統(tǒng)、平臺、波束取代雷達(dá)點(diǎn)跡模擬器的相應(yīng)信息,以真實(shí)雷達(dá)的點(diǎn)跡作為雷達(dá)點(diǎn)跡模擬器的背景信息,在場景編輯中靈活地設(shè)置目標(biāo)、干擾、雜波、隨機(jī)目標(biāo),得到近似實(shí)裝的靈活多變的場景,實(shí)現(xiàn)對雷達(dá)數(shù)據(jù)處理軟件的接口、功能、性能進(jìn)行詳盡而徹底的測試。
[1]KANG E W.Radar System Analysis,Design and Simulation[M].Boston:Artech House,2008:112-133.
[2]李承志,李煒.雷達(dá)仿真系統(tǒng)場景生成模塊設(shè)計(jì)[J].火控雷達(dá)技術(shù),2012,41(3):18-21.
[3]郭佳意,馬敏,任清安.岸基雷達(dá)模擬器的設(shè)計(jì)與實(shí)現(xiàn)[J].現(xiàn)代電子技術(shù),2012,35(14):90-96.
[4]郭佳意,任清安,馬敏.雷達(dá)模擬器中判定目標(biāo)點(diǎn)跡發(fā)現(xiàn)的解耦算法[J].空軍預(yù)警學(xué)院學(xué)報,2013,27(2):102-104,107.
[5]江建民,賀瑞龍.通用搜索雷達(dá)模擬器的設(shè)計(jì)[J].雷達(dá)科學(xué)與技術(shù),2006,4(1):7-11.JIANG Jianmin,HE Ruilong.Design of General-Purpose Surveillance Radar Simulator[J].Radar Science and Technology,2006,4(1):7-11.(in Chinese)
[6]SKOLNIK M I.Radar Handbook[M].3rd ed.New York:Mc Graw-Hill,2008.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32