基于極化特征的雷達目標識別技術(shù)?
2016-01-10 06:51:39宋新景
雷達科學與技術(shù) 2016年1期
關(guān)鍵詞:特征
宋新景
(1.中國電子科技集團公司第三十八研究所,安徽合肥230088;2.孔徑陣列與空間探測安徽省重點實驗室,安徽合肥230088;3.智能情報處理重點實驗室,安徽合肥230088)
0 引言
雷達作為重要的電子信息設(shè)備,自誕生起就在戰(zhàn)爭中發(fā)揮了極其重要的作用。但隨著進攻武器裝備的發(fā)展,只具有探測和跟蹤功能的雷達已經(jīng)不能滿足信息化戰(zhàn)爭的需要,迫切要求雷達不僅要具有探測和跟蹤功能,而且還要具有目標識別功能。雷達目標識別在防空預警系統(tǒng)、海情監(jiān)控系統(tǒng)、彈道導彈防御系統(tǒng)等技術(shù)領(lǐng)域發(fā)揮出了很大威力。
雷達目標識別的基本原理是利用目標在雷達遠區(qū)所產(chǎn)生散射場的特征,獲得用于目標識別的信息,包括回波信號的幅度、相位、頻譜和極化等目標特征信息。對獲取的目標信息進行特征提取,與已知目標的特性進行比較,從而達到目標識別的目的。
雷達回波的極化特征是繼幅度、相位和多普勒頻移之后的另一個重要特征。雷達目標在受到電磁波的輻射時,其散射的電磁波的極化狀態(tài),一般都不再與入射的電磁波的極化狀態(tài)相同,因而雷達目標起著一個極化變換器的作用,且這種作用由目標的形狀、結(jié)構(gòu)和材料決定任何目標都有其特定的極化變換作用,故可以利用目標回波中的極化現(xiàn)象來識別目標。
1 基于極化特征的目標識別方法
1.1 國內(nèi)外研究現(xiàn)狀
從公開文獻上看,當前國內(nèi)外研究得比較多的是極化SAR圖像目標識別,主要用于遙感等,取得了較成功的研究。目前國內(nèi)具有極化能力的雷達較少,主要是成本較高,但隨著科技的發(fā)展以及工藝的改進,相信具有全極化測量能力的極化雷達會得到進一步的應(yīng)用。
1.2 極化特征識別研究方法概述
極化特征是與目標形狀本質(zhì)有密切聯(lián)系的特征,目標的形狀、尺寸、結(jié)構(gòu)和取向決定了對照射電磁波的極化變換作用。
利用極化信息進行雷達目標識別的方法[1],主要分為:
1)根據(jù)極化散射矩陣來識別目標是利用極化信息識別目標的基本方法;
2)根據(jù)從目標極化散射矩陣中導出的目標極化參數(shù)集來識別目標;
3)根據(jù)目標的最佳極化或極化叉來識別目標;
4)對高分辨雷達,通過極化重構(gòu)與已知目標數(shù)據(jù)庫對比獲得識別結(jié)果;
5)將極化信息與已有的成像識別技術(shù)相結(jié)合,進行目標識別;
6)將極化信息與沖激響應(yīng)結(jié)合起來,利用目標瞬態(tài)極化響應(yīng)進行目標識別。
1.3 極化散射矩陣
在極化識別方向,極化散射矩陣[2]的概念提出較早,即利用二維復散射矩陣表示特定姿態(tài)和輻射源頻率下的目標散射特性。
極化特征通常由極化散射矩陣獲取。極化散射矩陣表征了目標對極化波的散射特性,與目標的形狀、大小、材料、結(jié)構(gòu)、姿態(tài)、雷達頻率等因素有關(guān),包含了豐富的目標信息。
散射矩陣中的元素通常為復數(shù),表示成一個與雷達散射截面(以功率度量)相關(guān)的電場分量,其值取決于收發(fā)極化狀態(tài)、目標的視角以及散射特性。在雷達視角及入射頻率一定的條件下,一個目標確定一個散射矩陣,表示形式如下:

式中,Ei和Es分別為入射波和散射波的極化狀態(tài)。下標“1”和“2”表示一組正交極化分量。第一個下標表示接收天線的極化方式,第二個下標表示發(fā)射信號的極化方式。用S1=S11+S22和S2=S11-S22分別表示散射矩陣[S]的跡和反跡。
采用水平線極化和垂直線極化分時發(fā)射的形式實現(xiàn)雙極化操作,其極化散射矩陣可表示為
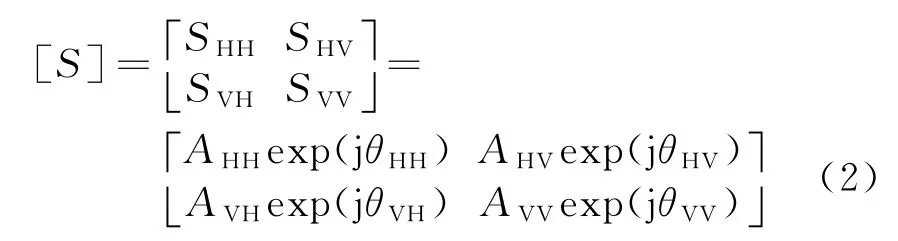
式中,A為回波幅度,θ為回波相位。對于互易性目標,可以近似地認為SHV≈SVH。
極化散射矩陣表征目標在給定取向上的散射特性,與目標的姿態(tài)角及收發(fā)天線選取的極化基有關(guān)。目標姿態(tài)坐標系如圖1所示。坐標系XYZ的原點O選取在目標的幾何中心上,選擇Z軸沿雷達視線方向,目標的姿態(tài)變化可以分解為繞3個軸的轉(zhuǎn)動。目標繞雷達視線的旋轉(zhuǎn)稱為俯仰,用φ度量;繞另兩個垂直于視線軸的旋轉(zhuǎn)分別稱為橫滾和偏航,分別用ρ和η度量。φ,ρ,η統(tǒng)稱為歐拉角,任一個歐拉角的改變都會使目標極化散射矩陣隨之改變。
對于雷達觀測者,極化基的改變或目標繞雷達視線旋轉(zhuǎn)都不增加新的目標極化信息。因此,尋找與目標繞視線旋轉(zhuǎn)和極化基無關(guān)的目標特征可消除三維姿態(tài)變化中的一維變化。
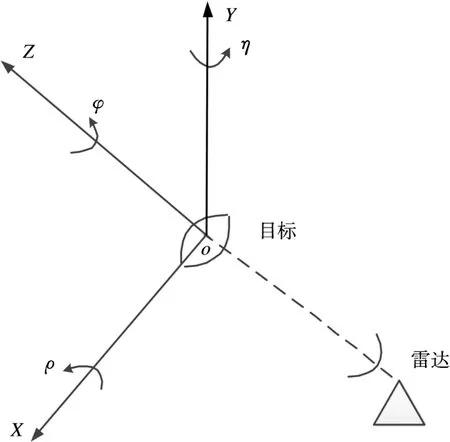
圖1 目標姿態(tài)的分解
1.4 極化不變量
采用極化不變量[3]表征目標的極化散射特性由Brickel提出,由于該量值不受法拉第旋轉(zhuǎn)(極化平面的旋轉(zhuǎn))或目標繞視線旋轉(zhuǎn)以及天線極化的某些誤差的影響,在目標識別中有著良好的應(yīng)用。
極化不變量完整地確定了在給定取向下目標的后向散射特性,表征了雷達從視線方向上觀察目標所能獲得的最大目標信息[4]。
極化不變量不隨俯仰角φ和雷達極化基改變,包括散射矩陣行列式的值、功率矩陣的跡、去極化系數(shù)、本征極化方向角和本征極化橢圓率,簡介如下:
1)散射矩陣行列式的值Δ

目標繞雷達視線旋轉(zhuǎn)或雷達繞目標視線旋轉(zhuǎn)時,散射矩陣行列式的值保持不變。
對于線目標,如金屬絲,Δ=0;對各向同性目標,如金屬球,Δ=A2(A為一實數(shù));對于對稱目標,Δ=S11S22。因此,不變量Δ粗略地反映了目標的粗細或“胖瘦”。
2)功率矩陣的跡P1
格雷夫斯(Graves)定義的功率散射矩陣為

式中,“?”代表共軛,“T”代表轉(zhuǎn)置。
功率矩陣的跡為繞雷達視線旋轉(zhuǎn)不變的量,代表了一對正交極化天線所接收到的總功率。功率矩陣的跡P1可用散射矩陣的元素表示:

它表征了全極化下的目標RCS值,可大致反映目標回波能量的大小。
3)去極化系數(shù)D

S1與P1均為極化不變量,因此去極化系數(shù)D亦如此。D大致反映了目標散射中心的數(shù)量,對于一些孤立散射中心,D通常小于0.5;較大的值(0.5<D≤1)多對應(yīng)多個散射中心的組合體目標。
4)本征極化方向角φd

式中,該特征反映了目標的極化方向。
5)本征極化橢圓率τd

總之,5個極化不變量完整地確定了在給定取向下目標的后向散射特性,表明雷達從視線方向觀察目標所能獲得的最大目標信息,不隨目標繞視線旋轉(zhuǎn)或雷達極化基改變而改變。具體地說,無須考慮雷達天線的極化就可以確定Δ,P1,D,φd和τd。Δ和P1大致反映了目標的大小和粗細;去極化系數(shù)D表明了目標散射中心的數(shù)量;而本征極化橢圓率τd是表征目標的對稱性的一個物理量;本征極化方向角φd指示出雷達天線與本征極化橢圓軸之間的相對取向,表征了目標特定的俯仰姿態(tài)。
五維極化不變量中,本征極化方向角和本征極化橢圓率與散射矩陣的本征問題相關(guān)[5]。本征極化為能使輸出與輸入相一致的輸入極化,此時對應(yīng)的散射矩陣稱為目標本征極化散射矩陣[S]d,表示如下:

式中,λ1和λ2為本征值,可實現(xiàn)散射矩陣的對角線化形式。任何目標均具有本征極化方向角和本征極化橢圓率。當發(fā)射極化與目標本征極化相匹配時,目標回波極化的方向與發(fā)射極化方向一致或相差π。目標RCS的極大極小值分別對應(yīng)于λ1和λ2。由于本征值不隨目標繞雷達視線旋轉(zhuǎn)或極化基的改變而改變,因此,本征極化方向角φd和本征極化橢圓率τd同樣具有極化不變性。
2 仿真試驗
本文采用電磁散射計算仿真數(shù)據(jù)進行分析,圖2給出了本文電磁散射計算所用的3種目標的網(wǎng)格化結(jié)構(gòu)模型,極化方式采用線極化H H,VV,HV,VH極化。
本節(jié)仿真利用的3個飛機目標的電磁模型尺寸信息如表1所示。其中,MTA為多用途大型運輸機,Drone為無人機,L15為高級教練機。
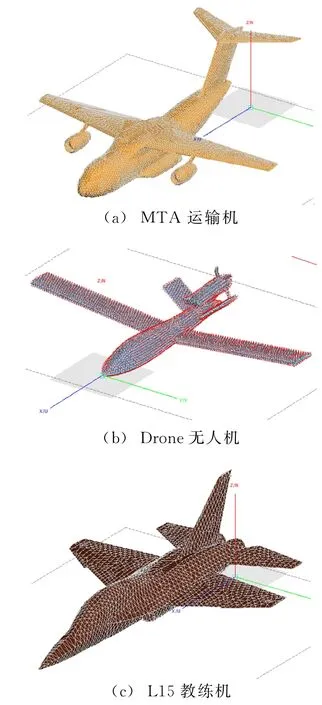
圖2 極化分析飛機電磁模型
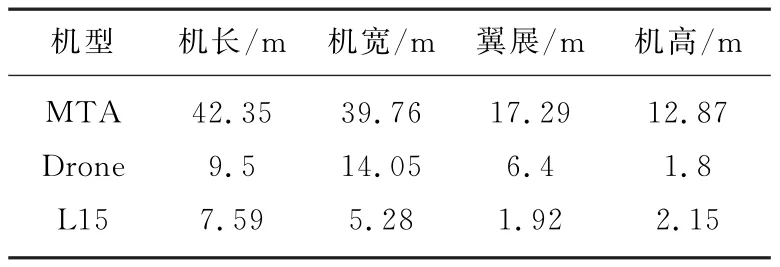
表1 3種機型的尺寸信息
利用電磁仿真軟件Feko Suite 6.0產(chǎn)生已知目標電磁模型的回波數(shù)據(jù)。頻率為50~75 MHz,頻率步進為1 MHz;方位角為0~180°,角度步進為1°,0°對應(yīng)于鼻錐,180°對應(yīng)于機尾。極化方式設(shè)置為水平、垂直線極化;選擇遠區(qū)觀察點,計算單站RCS;默認網(wǎng)格劃分;采用多層快速多極子算法迭代產(chǎn)生目標的回波數(shù)據(jù)。
3 特征提取與識別
3.1 特征提取與分析
依據(jù)電磁計算仿真數(shù)據(jù)提取極化散射矩陣,并進而提取極化不變量特征,圖3、圖4分別給出3個飛機目標在方位角為0°和90°下的極化不變量特征,行列式的值Δ、功率矩陣的跡P1、去極化系數(shù)D、本征極化方向角φd、本征極化橢圓率τd。
由圖3(a)、(b)和圖4(a)、(b)可知,Δ和P1特征除了量值的不同,其量值的變化趨勢是一致的。在90°方位下,MTA運輸機的Δ和P1遠遠大于無人機和教練機,與它們的尺寸信息相對應(yīng)。從圖3(c)、圖4(c)的D特征,在0°方位下,MTA的去極化系數(shù)特征0.6<D≤1,說明飛機目標是多散射中心目標,散射中心個數(shù)≥2,而Drone和L15在(0.3,0.6)范圍內(nèi),小型飛機在0°視線范圍只能觀測到分散的散射中心。在90°方位下,3個飛機去極化特征都0.6<D≤1,說明散射中心隨著方位角是變化的,并沒有規(guī)律性。
由圖3(d)、(e)和圖4(d)、(e)可知,3類目標的φd和τd特征也具有較明顯的差異,但在實際應(yīng)用當中,大型極化雷達很難保證極化相位的測量精度,而這兩個特征與相位關(guān)聯(lián)較明顯,因此本文對于這兩個特征不作深入分析,也不作為本文分類識別所用特征。

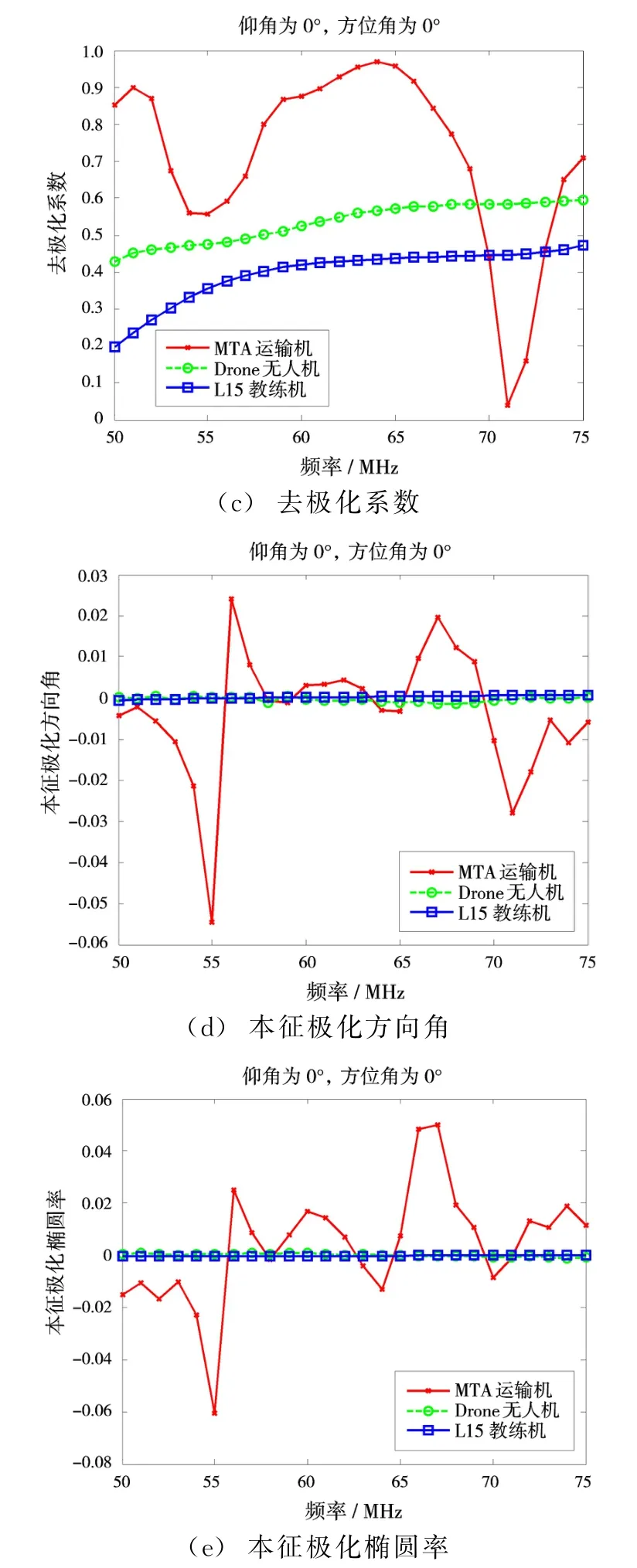
圖3 方位角0°時極化不變量的頻率分布曲線
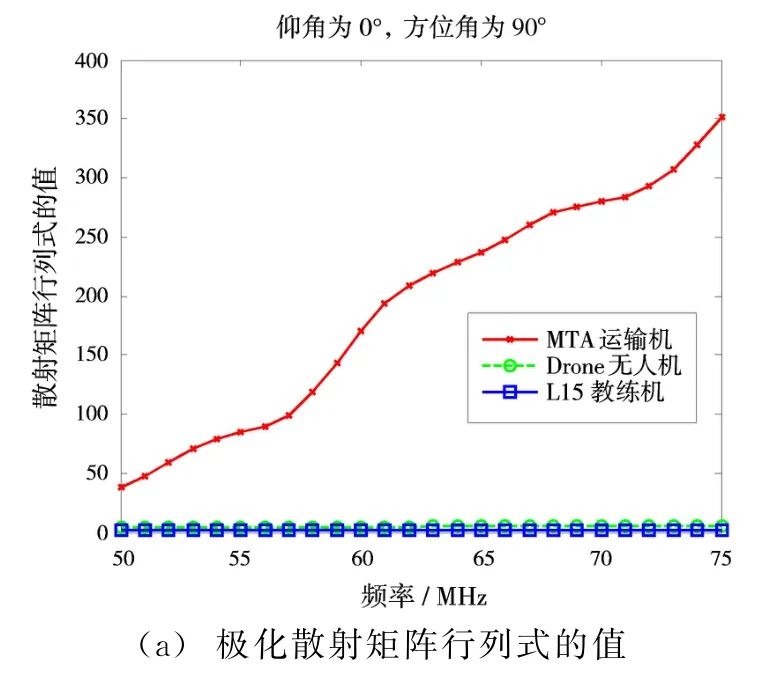
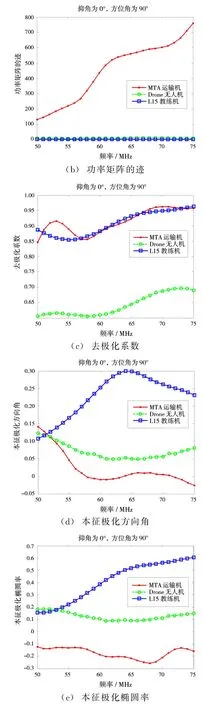
圖4 方位角90°時極化不變量的頻率分布曲線
3.2 識別結(jié)果及分析
圖5給出了極化目標分類識別的流程圖。根據(jù)前面公式可知,φd和τd特征容易受到相位的影響,而大型極化雷達很難保證極化相位測量精度,因此本文提出采用與幅度相關(guān)性較大的P1、D進行分類識別,而目標的幾何外形特征主要取決于極化的幅度信息。

圖5 極化目標分類識別流程圖
特征提取后進行分類識別,本文采用SVM分類器,SVM分類器的優(yōu)點泛化能力較強,收斂速度較快,且對小樣本訓練效果也較好。核函數(shù)采用高斯核函數(shù)。
由圖3(a)、(b)和圖4(a)、(b)可知,行列式的值和功率矩陣的跡特征變化較一致,在特征選擇時選擇一個特征進分類器,這里選取功率矩陣的跡P1,加上去極化系數(shù)特征D構(gòu)成兩維特征向量。特征分布二維圖如圖6所示。
從圖6可以看出,在不同方位下,這兩類特征不同目標之間的差別較大,具有一定的同類聚合性和異類之間的分離性。通過設(shè)計不同分類界面。考慮到在實際識別過程中,目標方位角度的細分,或引起運算速度降低,因此在分類過程,以10°為間隔設(shè)計分類器,目標姿態(tài)會由于各種因素的干擾而呈現(xiàn)出較隨機的變化,因此在特征提取過程中,開了一個3°的方位窗口,在方位窗口內(nèi)對特征量進行平滑。
在分類識別過程中,對獲取的仿真數(shù)據(jù),一半數(shù)據(jù)作為訓練集,剩余一半作為測試集。識別結(jié)果如表2所示。
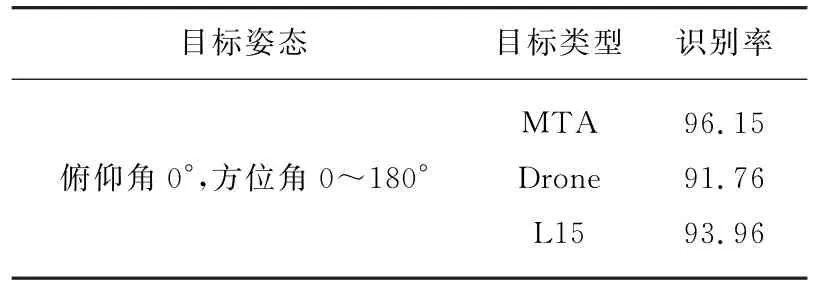
表2 基于P1、D特征的目標分類識別結(jié)果
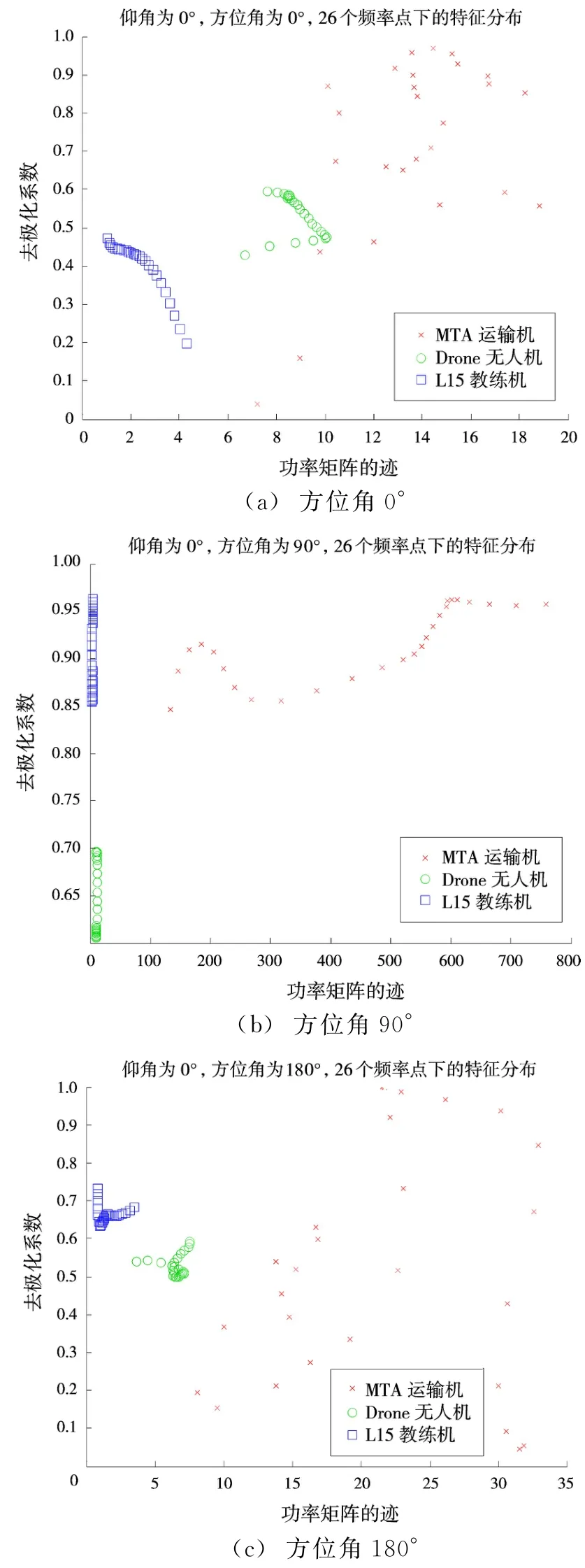
圖6 極化特征二維分布圖
4 結(jié)束語
本文在電磁計算飛機模型仿真數(shù)據(jù)基礎(chǔ)上對極化不變量特征進行提取,利用SVM分類器,對其中兩種特征進行分類識別,分類試驗結(jié)果驗證了極化特征的有效性。對于飛機外形存在較大差異的3種飛機,基于功率矩陣的跡和去極化系數(shù)有較好的分類識別效果,為區(qū)分大中小飛機提供了一種解決方法。
[1]伍光新.諧振區(qū)雷達目標特征提取與目標識別研究[D].哈爾濱:哈爾濱工業(yè)大學,2008:6-7.
[2]王福友,羅釘,劉宏偉.基于極化不變量特征的雷達目標識別技術(shù)[J].雷達科學與技術(shù),2013,11(2):165-172.
[3]閆昆.全極化雷達高分辨距離像目標識別方法研究[D].西安:西安電子科技大學,2013:15-30.
[4]肖順平,王雪松,莊釗文.基于極化不變量的飛機目標識別[J].紅外與毫米波學報,1996,15(6):439-444.
[5]黃培康,殷紅成,許小劍.雷達目標特性[M].北京:電子工業(yè)出版社,2005:16-18.
猜你喜歡
數(shù)學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數(shù)理化(高中版.高考數(shù)學)(2022年3期)2022-04-26 14:04:16
數(shù)學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數(shù)學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數(shù)學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38