機載測云雷達探測模式分析?
2016-01-10 11:40:16
雷達科學與技術 2016年2期
關鍵詞:飛機
(安徽四創(chuàng)電子股份有限公司,安徽合肥230088)
0 引言
工作頻率在30~300 GHz(波長為10~1 mm)范圍內的雷達,常稱為毫米波雷達。毫米波在細微粒子中具有較強的散射特性[1],利用這一特性可以提高對云霧的探測能力,有利于提高對氣象目標形成的微物理過程的認識,因此測云雷達常采用毫米波頻段(例如Ka,W波段[2]),毫米波設備具有體積小、重量輕等特點。機載毫米波測云雷達以高機動的飛機作為搭載平臺,直接進入試驗區(qū)域實現(xiàn)大范圍的云霧探測。
國際上,毫米波測云雷達的研制和試驗已進入成熟階段,車載和機載毫米波測云雷達均有多種型號,在技術實現(xiàn)上,脈沖壓縮、調頻連續(xù)波、多極化、雙頻段等技術都有應用,而且載有W波段測云雷達的衛(wèi)星已于2005年送上軌道,用以測量全球云垂直分布。
近年來,我國已經研制出Ka波段、W波段測云雷達,包括固定式、車載式、機載式產品。本文根據當前國際上典型機載毫米波測云雷達技術參數,結合我國采用載機的特點,探討機載測云雷達探測模式,并進行簡單分析和說明。
1 機載測云雷達主要參數
根據我國毫米波雷達現(xiàn)有技術水平和研制能力,并參考國外同類雷達的工作參數,筆者認為:我國首部機載測云雷達樣機宜采用全相參多普勒體制,選擇國產運-7飛機為搭載平臺,雷達工作頻率為W波段(波長3 mm),通過發(fā)射水平極化電磁波,同時接收回波信號的水平和垂直極化分量,用以估測云反射率因子Z、線性退極化比LDR、徑向速度V、譜寬W等基本參數,以便提供云分布、云的狀態(tài)屬性,以及云相態(tài)和云中氣流分布等分析資料。
雷達系統(tǒng)主要技術指標暫定為:
工作頻率:W波段(94~95 GHz)
探測范圍:距離0.2~20 km
強度:-50~+20 d Bz
速度:-17~+17m/s(9k Hz/
6k Hz雙PRF模式)
譜寬:0~8 m/s
退極化比:-5~-30d B
波束掃描:在飛行方向垂直面內作扇形掃描,掃描范圍60°
掃描速度:10°/s、20°/s、40°/s、60°/s可選
天線增益:≥47 dB
波束寬度:≤0.7°
發(fā)射功率:≥1.5 k W(峰值)
脈沖寬度:0.25μs,0.5μs(可選)
重復頻率:2~12 k Hz
載機飛行速度:120 m/s(典型)
飛行高度:5 000 m(典型)
2 探測模式和相關計算
2.1 波束掃描方式
國外機載測云雷達的載機最大飛行高度一般比較高,例如美國NASA(美國宇航局)的哥達德宇航中心(Goddard Space Flight Center)研制的機載W波段測云雷達系統(tǒng)(CRS)裝載于NASA的ER-2型高空飛機上,其飛行高度可達20 km。而云的高度主要在12 km以下,因此CRS主要在云的上方向下探測。
國外機載毫米波測云雷達大多數沒有波束掃描功能,但由于飛行高度較高,容易實現(xiàn)對高云的探測,而國內運-7飛機的飛行高度為5 km左右,對于高層云探測,需要將波束向上調整,因此雷達天線波束需具有掃描功能,對于大多數情況,可采用“側掃”方式,雷達波束透過吊艙的側窗向側面發(fā)射,并上下掃描;如果需要對飛機下部的云層作重點探測,可采用“下掃”方式,雷達波束透過下窗向下發(fā)射,并作左右掃描。“側掃”和“下掃”如圖1所示。
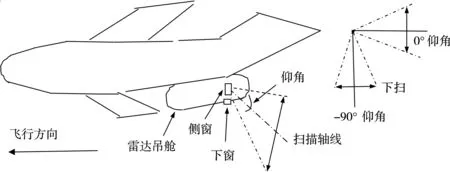
圖1 波束掃描示意圖
在結構設計上應該保證不論側掃還是下掃狀態(tài),雷達波束均與飛行方向垂直,因此,飛機航行引起的多普勒頻率可以忽略。
側掃:雷達波束在飛行方向的垂直面內俯仰掃描,掃描范圍-30°~+30°,掃描中心線(軸線)即為透波窗法線方向,當飛機以平穩(wěn)姿態(tài)飛行時,掃描軸線平行于地面(即仰角0°)。
下掃:雷達波束在飛行方向的垂直內俯仰掃描,掃描范圍-60°~-120°,當飛機以平穩(wěn)姿態(tài)飛行時,掃描軸線垂直于地面(即仰角-90°)。
定向:雷達波束在飛行方向的垂直面上固定指向于仰角范圍-30°~+30°內的某一位置,或-120°~-60°范圍內某一位置。
2.2 相關計算和分析
1)探測幅寬和縱向間隔
圖2為機載W波段測云雷達波束掃描示意圖。假設工作狀態(tài)是對飛機下方L處的云層左右掃描,掃描幅度為左右各30°,掃描軸線垂直向下,很顯然,對于距離飛機L處,探測幅寬為

探測幅寬W與距離L對應關系如表1所示。
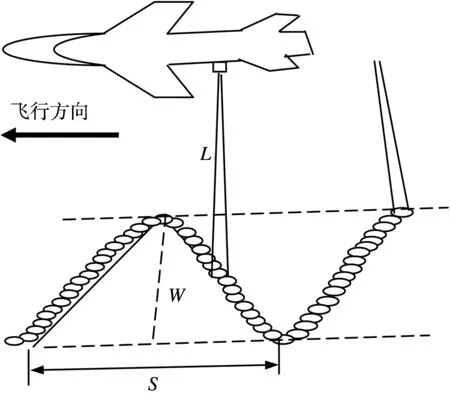
圖2 下視探測
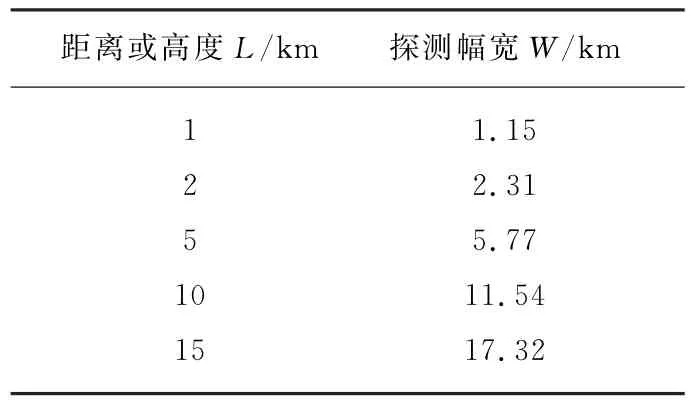
表1 探測幅寬與距離對應關系
從圖2可看出,飛行探測時,波束掃描線之間的縱向間隔S與飛機飛行速度v、波束掃描速度r有關,即

假設飛行速度v=120 m/s,由上式可計算出縱向間隔S與掃描速度r之間的對應關系如表2所示。
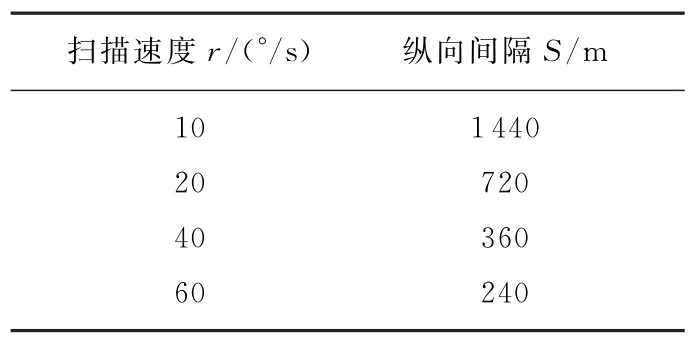
表2 縱向間隔與掃描速度對應關系(飛行速度=120 m/s)
從表2可以看出,在飛行速度一定的情況下,波束掃描速度越快,縱向間隔S越小,也就是說在飛行方向上的探測密度越大,這當然是我們所希望的,但另一方面,隨著波束掃描速度的加快,雷達波束對目標樣本的照射時間變短,也就是樣本回波的脈沖數變少,探測精度變差。所以在實際應用中,應根據探測要求合理選擇波束掃描速度。
2)脈沖樣本數(脈沖積累數設置)
氣象雷達作回波信號處理時需要對目標回波的多個脈沖樣本進行積累平均,以提高估值精度,例如一般天氣雷達對脈沖樣本積累數通常取32以上。顯然對于機載測云雷達,有效的脈沖積累數不僅與波束掃描速度、雷達重復頻率有關,還要受到飛機飛行速度的限制,以下根據計算數據提出對本雷達脈沖積累數的合理設置。
雷達波束掃描示意圖如圖3所示,假設:
雷達波束寬度0.7°,波束掃描速度0°/s(固定指向),10°/s,20°/s,40°/s,60°/s可選,飛機飛行速度典型值v=120 m/s(即430 km/h)。

圖3 波束掃描示意圖
假設所關注的是400 m以外的云目標,如圖4所示,對于400 m處,雷達波束照射區(qū)直徑為

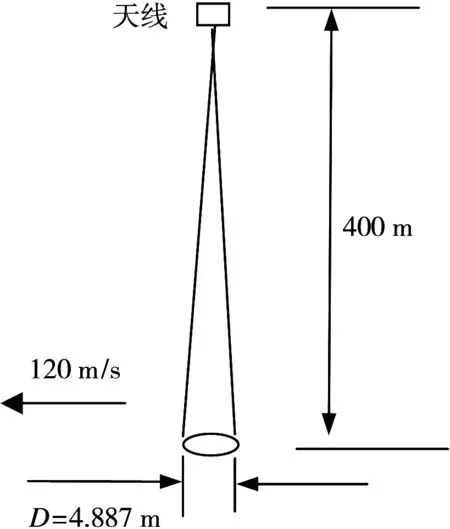
圖4 波束照射區(qū)直徑
① 固定指向(波束不掃描)
當波束為固定指向時,波束駐留時間[3]為

如果取雷達重復頻率為10 k Hz,當雷達波束為固定指向時,對于400 m以外的云目標,則脈沖積累數最大可設置為0.04 s×重復頻率=400。表3給出了在不同重復頻率時,脈沖積累數典型設置值。
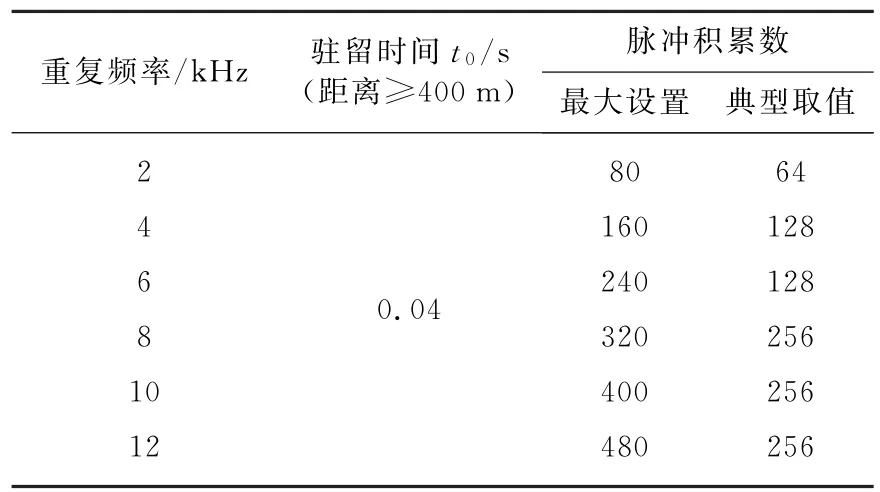
表3 脈沖積累的典型取值(波束為固定指向,飛行速度120m/s)
以上計算是針對400 m以外的云目標,對于200~400 m的近目標,顯然駐留時間要短些,嚴格說來,脈沖積累數的設置值應該比表3數據低,因此按表3設置脈沖積累數。盡管對于400 m以內的近目標并非合理,但對于機載測云雷達來說,更為關注的應該是400 m以外或更遠處的云目標,因此按表3設置脈沖積累數是可以接受的。
② 扇掃(±30°側掃或下掃)
如果假設飛機在空中是靜止的(飛行速度為0),在這種“理想”情況下,波束掃描過程中對點目標駐留時間僅取決于波束掃描速度,即駐留時間t1≈波束寬度/掃描速度,如表4所示。
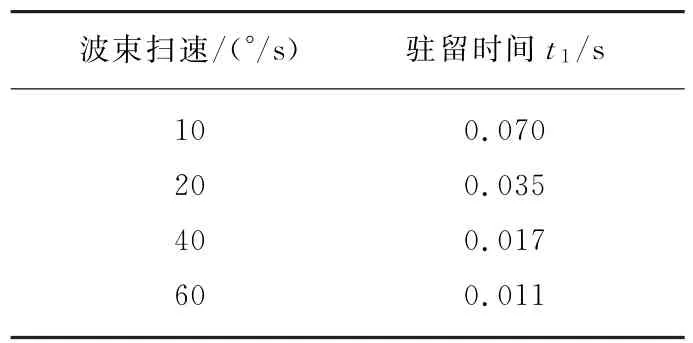
表4 波束駐留時間(假設飛機靜止,波束±30°扇掃)
表4是假設飛機飛行速度為0(空中靜止)的情況,實際上飛機是以120 m/s速度在飛行中,因此實際駐留時間應該比表4的短。綜合表3和表4數據,可以近似認為:當飛行速度為120 m/s,在扇掃(±30°)情況下,各種掃描速度下駐留時間近似值如表5所示。
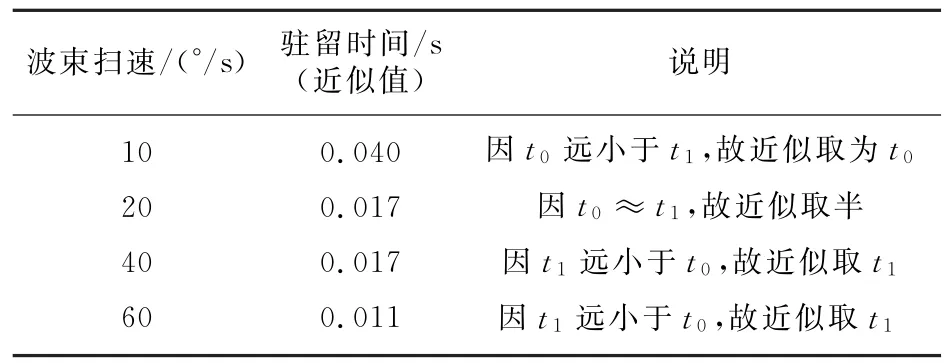
表5 波束駐留時間(飛機速度120m/s,波束±30°扇掃)
通過以上對駐留時間計算和分析,機載測云雷達信號處理器在脈沖積累數設置上可以參考表6進行。
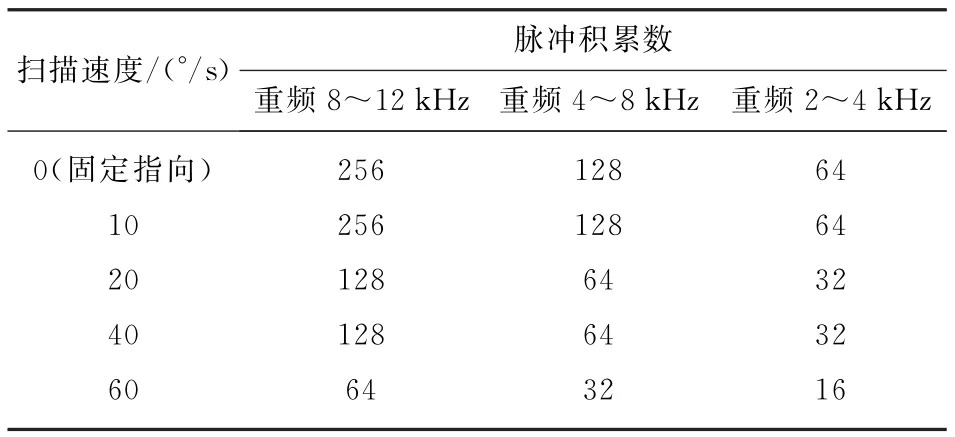
表6 脈沖積累數典型設置
2.3 典型探測模式
根據云目標分布特性,機載測云雷達探測模式[4]主要有以下兩種。
1)探測模式—側掃
主要是針對運-7飛機飛行高度以上的云探測,例如高積云、卷云、卷積云等,如圖5所示。重點關注云的分布,探測要素主要是云反射率和線性退極化比、徑向速度和譜寬。采用寬脈沖(0.5μs)發(fā)射,以提高靈敏度。為保證20 km探測范圍,雷達重復頻率相對較低,一般在6 k Hz以下。
雷達系統(tǒng)工作參數典型配置如下:
重復頻率:6 k Hz(不模糊測速范圍:±4.7 m/s)
脈沖寬度:0.5μs
波束掃描范圍:±30°
掃描速度:40°/s(掃描速度可選或定向)
脈沖積累數:64
在飛行探測試驗過程當中,在側掃模式下采用了定向和掃描兩種探測方式來探測云反射率和線性退極化比、徑向速度和譜寬,取得的飛行探測數據基本驗證了本文對典型探測模式的分析是基本正確的,飛行探測數據[5]如圖6和圖7所示。
2)探測模式—下掃
下掃主要是針對運-7飛機飛行高度以下的云探測,如雨層云、積雨云等。由于載機飛行高度在5 000 m左右,因此對中低云探測可采用下掃方式,如圖8所示,這種探測模式對探測云內上升、下沉氣流區(qū)比較有利,由于探測距離并不大,因此可選用較高的重復頻率,脈沖寬度采用0.5μs,雷達系統(tǒng)工作參數典型配置如下:
重復頻率:1 2 k H z(不模糊測速范圍:±9.5 m/s)
脈沖寬度:0.5μs
波束掃描范圍:±30°
掃描速度:40°/s(速度可選或定向)
脈沖積累數:128
在飛行探測試驗過程當中,在下掃模式時采用了定向探測方式來探測云反射率和線性退極化比、徑向速度和譜寬,取得的飛行探測數據基本驗證了本文對典型探測模式分析是基本正確的,飛行探測數據如圖9所示。
以上給出了兩種典型的探測模式,每種模式都對雷達系統(tǒng)工作參數作出了明確規(guī)定,但在試驗中為便于比較,還可能需要選擇其他參數,具體參數匹配原則可參考表6。
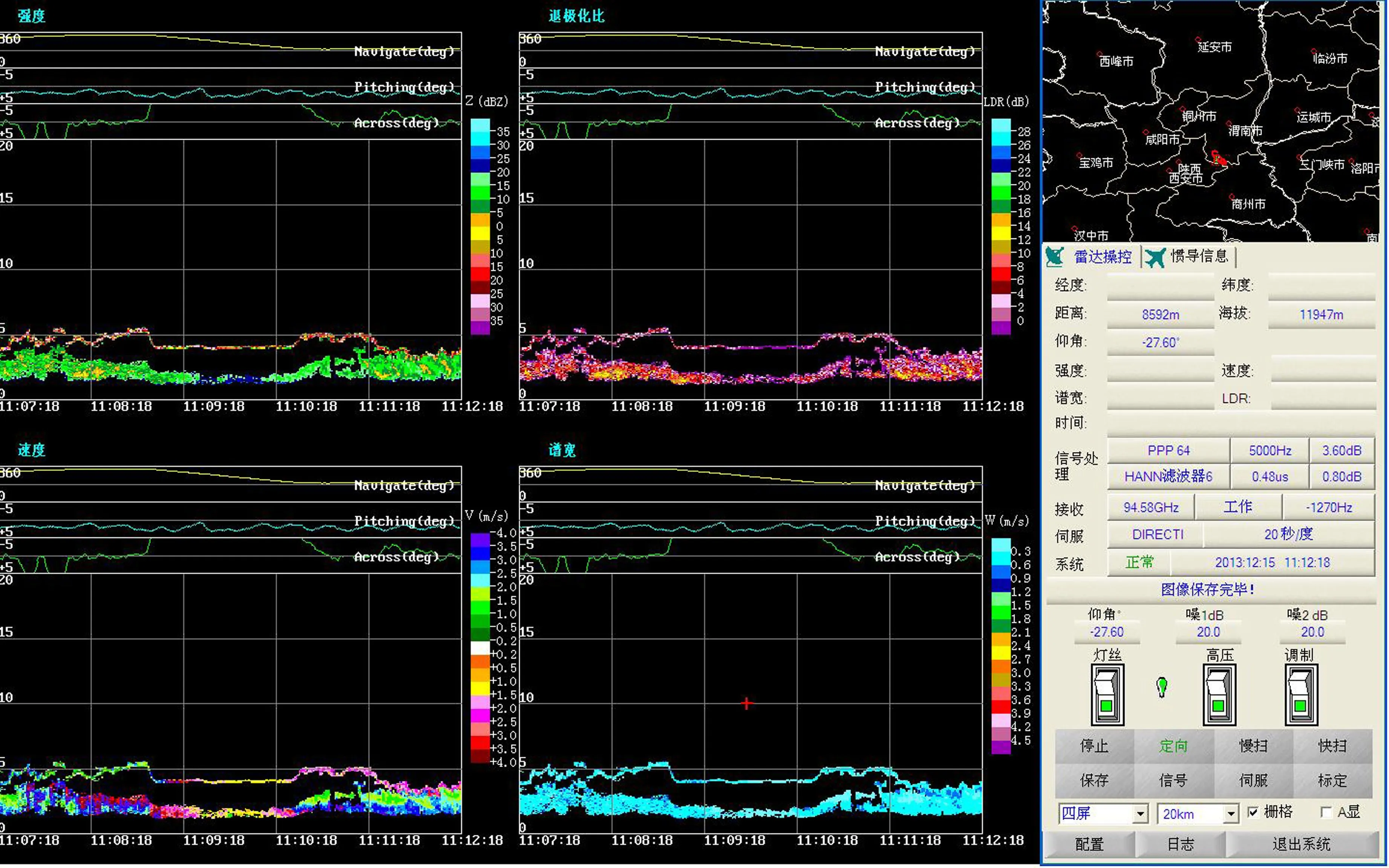
圖6 探測模式:側掃定向方式
圖7 探測模式:側掃掃描方式
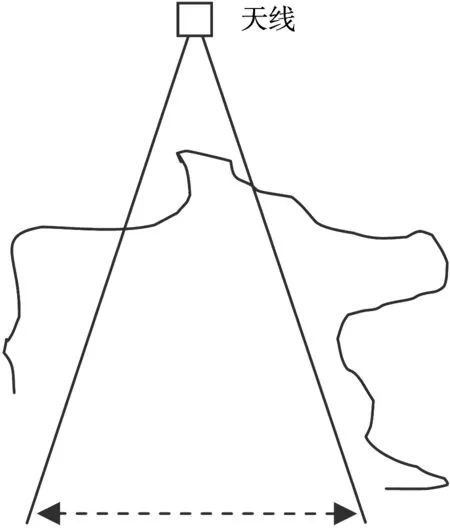
圖8 探測模式—下掃
3 結束語
以上分析中沒有考慮地形變化、天線旁瓣引起的地物回波等因素,實際上,在確定機載多普勒探測模式時(重復周期、脈沖積累數、掃描速度等),還應考慮飛機抖動、姿態(tài)變化等因素對探測效果的影響,因此雷達最佳探測模式需要綜合多種因素進行調整,本文提出的探測模式僅供相關人員參考。
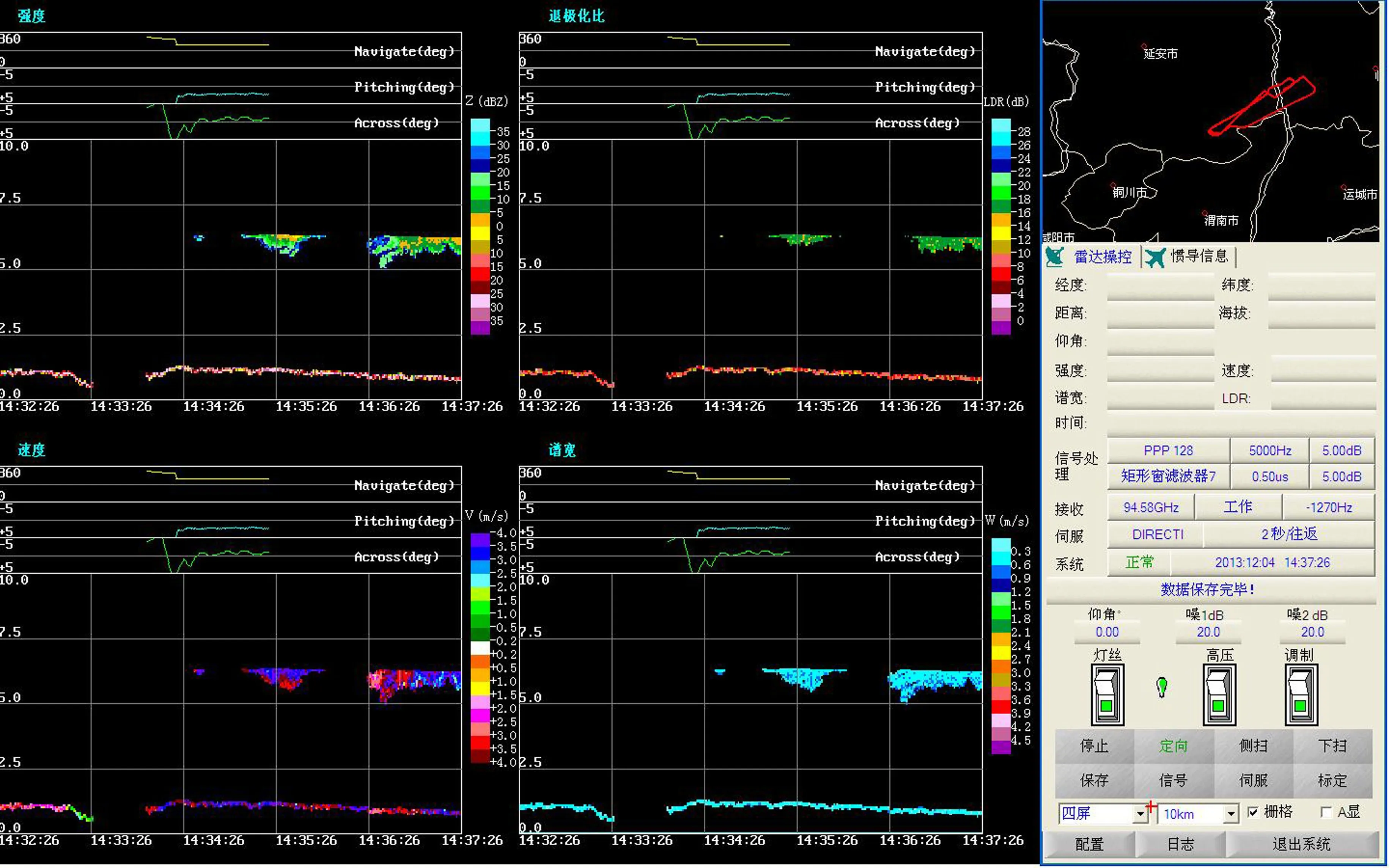
圖9 探測模式:下掃定向方式
[1]向敬成,張明友.毫米波雷達及其應用[M].北京:國防工業(yè)出版社,2005:29.
[2]SKOLNIK M I.雷達手冊[M].2版.南京電子技術研究所,譯.北京:電子工業(yè)出版社,2003:12-14.
[3]張培昌,杜秉玉,戴鐵丕.雷達氣象學[M].北京:氣象出版社,2001:159.
[4]蘇濤,高仲輝,黃興玉.94 GHz機載測云雷達總體技術研究[J].雷達科學與技術,2013,11(6):574-577,582.SU Tao,GAO Zhonghui,HUANG Xingyu.Research on Airborne Cloud Radar System[J].Radar Science and Technology,2013,11(6):574-577,582.(in Chinese)
[5]高仲輝,黃興玉,魏鳴,等.機載W波段雙線偏振測云雷達回波分析[J].雷達科學與技術,2014,12(5):561-568.GAO Zhonghui,HUANG Xingyu,WEI Ming,et al.Analysis of Cloud Echo Observed by Airborne W-Band Dual-Linear Polarization Cloud Radar[J].Radar Science and Technology,2014,12(5):561-568.(in Chinese)
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學)(2020年12期)2021-01-18 06:15:26
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學版)(2020年2期)2020-05-21 03:35:16
當代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33