基于轉子磁場定向的永磁同步電動機矢量控制系統對比分析
2016-01-22 02:28:32王飛宇趙朝會田井呈卓克瓊
上海電機學院學報 2015年5期
王飛宇, 趙朝會, 田井呈, 卓克瓊
(上海電機學院 電氣學院, 上海 201306)
基于轉子磁場定向的永磁同步電動機矢量控制系統對比分析
王飛宇,趙朝會,田井呈,卓克瓊
(上海電機學院 電氣學院, 上海 201306)
摘要:介紹了基于轉子磁場定向的永磁同步電動機(PMSM)矢量控制系統的原理,依據Clark變換、Park變換、空間矢量調制(SVPWM)和磁場定向控制等理論,借助Matlab/Simulink搭建了PMSM矢量控制仿真系統,研究了比例-積分-微分(PID)、積分分離式PID和比例-積分(PI)3種控制方式下PMSM矢量控制系統的啟動性能、抗干擾性能和調速性能。仿真結果表明: 采用積分分離式PID控制方式較傳統PID和PI控制方式的PMSM矢量控制系統具有更好的啟動特性、動態響應、調速性能和轉矩性能。
關鍵詞:永磁同步電動機; 矢量控制; 積分分離式PID控制
收稿日期:2015 - 09 - 09
基金項目:上海市教育委員會科研創新項目資助(13ZZ142)
作者簡介:王飛宇(1990-),男,碩士生,主要研究方向為電機驅動和控制,E-mail: wangfeiyu0202@163.com
通信作者:趙朝會(1963-),男,教授,博士,主要研究方向為電力電子及電力傳動,E-mail: zhaoch@sdju.edu.cn
文章編號2095 - 0020(2015)05 -0260 - 07
中圖分類號:TM 351; TM 341
文獻標志碼:A
Abstract:This paper introduces the principle of permanent magnet synchronous motor (PMSM) vector control system using field oriented control system based on rotor. According to the principle of Clarke and Park transformation, space vector pulse width modulation(SVPWM), and the theory of field oriented control, the paper builds a control simulation system of PMSM with Matlab/Simulink. Starting anti-jamming and speed control performance of PMSM vector control system are studied using three difference control styles: PID, integral separated PID, and PI. Simulation results show that a PMSM vector control system using integral separated PID has good startup characteristic, fast dynamic response, wide speed range and good torque performances as compared with PID and PI.
Comparative Study of Permanent Magnet Synchronous MotorControl System Based on Rotor Field Oriented Control
WANGFeiyu,ZHAOChaohui,TIANJingcheng,ZHUOKeqiong
(School of Electrical Engineering, Shanghai Dianji University, Shanghai 201306, China)
Key words: permanent magnet synchronous motor(PMSM); vector control system; integral separated PID control
永磁同步電動機(Permanent Magnet Synchronous Motor, PMSM)具有高效率、高功率密度、損耗小和結構簡單等優點。伴隨著數字交流伺服控制芯片的發展,PMSM矢量控制系統越來越多地被用于高動態性能、高精度的場合[1-2]。PMSM矢量控制系統通過Clark和Park正交坐標變換,將電動機電流分解成兩個獨立的直軸分量和交軸分量,實現了電流兩個分量的解耦[3-4];這樣,PMSM可以對定子電流的幅值、頻率和相位進行靈活地調節和控制,進而通過調節直軸和交軸分量電流分別控制電動機的磁通和轉矩,具有與控制直流電動機同樣的效果[5],轉矩分量與勵磁分量的解耦使得PMSM矢量控制系統成為高性能的驅動系統。
在矢量控制系統中,電流的直軸和交軸分量經控制器調節輸出電壓信號。電壓信號使空間矢量脈沖調制(Space Vector Pulse Width Modulation, SVPWM)[6-8]模塊發出脈沖,逆變器通過脈沖指令來獲得合適的電壓矢量和作用時間,并在指定的時間達到需求值,完成對轉矩分量和勵磁分量的有效控制[9]。
在PMSM矢量控制系統中,電流環[10-11]和轉速環[11]解耦所需的調節器往往選擇使用比例-積分(PI)控制器。PI控制器具有簡易性、魯棒性和操作簡單等優點。但是,在一些控制精度較高的場合,傳統固定增益的PI調節器已不能滿足需求,因此,研究人員對其進行了改進。文獻[12]中采用一種變參數PI控制器,在一定程度上改善了控制精度。另外,在許多場合電動機需要面對頻繁啟動、突加負載和轉速突變等工況;這些工況帶來的輸入信號偏差會使積分作用產生很大的負面效果,產生較大的超調、引起振蕩和穩定性降低等,PMSM需要具備應對這些工況的能力。文獻[13]中分析了一種抗積分飽和比例-積分-微分(PID)控制器,限定了輸入誤差信號偏差的最大幅值,避免了控制量長時間地停留在飽和區。文獻[14]中分析了積分分離式PID控制器,當輸入偏差超過一定值時,取消積分作用,避免了由于積分作用產生的超調;當偏差較小時,引入積分作用,以取消靜差。另外,有研究人員將PID控制與智能控制算法結合[15],取得了不錯的效果。
本文對基于轉子磁場定向的PMSM矢量控制系統進行了理論分析與研究,對矢量控制系統中電流環電流的解耦給出了分析,擴展了電流環和速度環PID控制器,對比分析了PID、PI和積分分離式PID控制3種控制方式,并通過MATLAB/Simulink對矢量控制系統建模和仿真驗證。
1PMSM的數學模型及矢量控制原理
PMSM是多變量耦合的系統。為更好地分析PMSM,本文做如下假設: ① 氣隙磁場與感應電動勢均為正弦分布;② 磁路不飽和;③ 轉子無阻尼繞組;④ 永磁體磁動勢恒定。
1.1 PMSM數學模型
PMSM矢量控制是建立在等效坐標變換理論基礎上的控制方法,其在三相坐標系中的數學模型經過Clark、Park變換后可得到在dq坐標系的數學模型,其中,電壓方程為
(1)
式中,ud、uq、id、iq分別為d、q軸電壓和電流;Rs為定子繞組電阻;Ld、Lq為定子d、q軸等效電感;ωr為轉子角速度;ψd、ψq為d、q軸等效磁鏈分量。
磁鏈方程為
(2)
式中,ψf為永磁體的勵磁磁鏈。
電磁轉矩方程為
Te=np(ψdiq-ψqid)
(3)
式中,Te為電磁轉矩;np為極對數。
運動方程為
(4)
式中,TL為負載轉矩;J為轉動慣量。
1.2 矢量控制原理
PMSM矢量控制可以理解為對電磁轉矩和磁阻轉矩的控制,也就是對d、q軸電流的控制。依據對d、q軸電流控制方法的不同,有不同的控制方式,其中主要的矢量控制方式有id=0控制、恒轉矩控制、最大轉矩電流比控制、弱磁控制等[6]。
本文采用id=0控制。該控制方式使電流矢量全部位于q軸(即d軸分量為零),定子電流全部產生轉矩,這樣,就可以通過單一地控制q軸電流分量來控制電磁轉矩,獲得與控制直流電動機相同的作用效果。由于id=0,轉矩方程可簡化為
(5)
可見,反饋電流經變換后得到iq,其與設定電流值id經過調制可獲得電壓信號uα和uβ;然后根據uα和uβ的大小和方向合成需求電壓矢量u,此時需要空間矢量脈沖調制(Space Vector Pulse Width Modulation, SVPWM)與逆變器的配合來合成控制電動機所需的電壓矢量。
SVPWM技術在PMSM矢量控制系統中起著至關重要的作用。SVPWM將逆變器系統與交流電動機視為一個整體,以產生圓形旋轉磁場作為控制逆變器動作的目的;其控制方式是通過交替使用幾個不同的電壓空間矢量來實現對磁鏈的跟蹤。
SVPWM脈沖形成有以下4個步驟:
(1) 判斷空間矢量電壓所在的扇區;
(2) 計算晶體管導通的時間t1、t2,公用值X、Y、Z;
(3) 確定空間矢量的切換配合時間;
(4) 與三角載波比較生產6路PWM波形。
1.3 矢量控制系統框圖
PMSM矢量控制系統框圖如圖1所示。

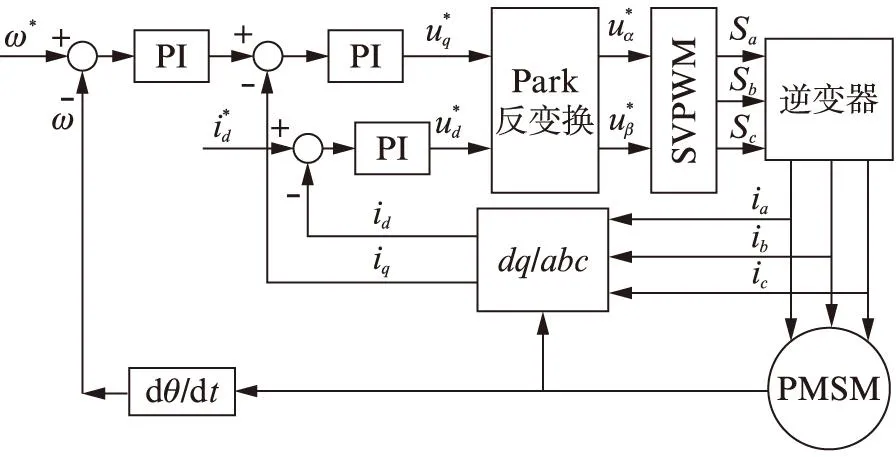
圖1 永磁同步電動機磁場定向控制框圖Fig.1 Diagram of field oriented control system for PMSM
23種PID控制方式分析
在PMSM矢量控制系統中,PID調節器常用于耦合量之間的解耦控制[4]。同步旋轉的dq坐標系的激磁電流分量與轉矩電流分量之間存在耦合,由式(1)、(2)設計得到電流解耦控制框圖如圖2所示。
圖中,電流調節器Cd(s)和Cq(s)常采用PID控制器。PID控制器具有控制簡單、易于操作和成本低等優點,是生產過程中最普遍采用的控制方法,技術也最為成熟,在機電、冶金和機械自動化的控制系統中都有廣泛應用[14]。PID是將偏差的比例(P)、積分(I)和微分(D)通過線性組合構成控制量,對被控對象進行控制。
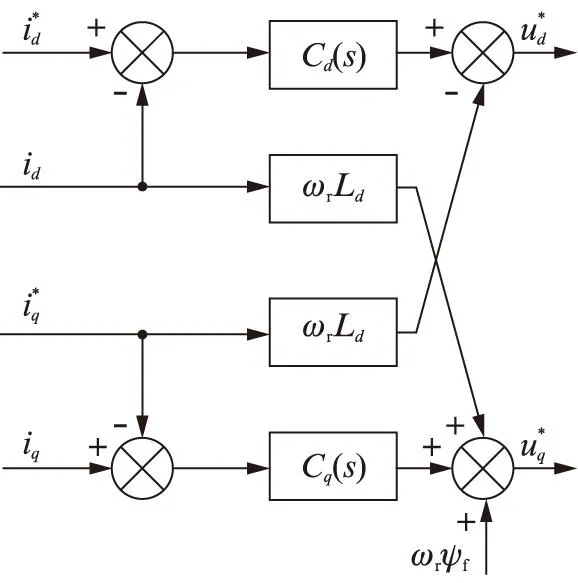
圖2 電流解耦的控制框圖Fig.2 Diagram of the current decoupling control
2.1 傳統PID控制與PI控制
在一些控制精度要求不太高的控制系統中,常使用PI控制器就能滿足需求。PI控制框圖如圖3所示。
在控制精度要求較高的矢量控制系統中,如電動機矢量控制系統是一個多變量輸入、輸出的非線性系統,其中電感參數的非線性會導致解耦項的偏差。由于解耦項為前饋量,其偏差的大小會影響電流的跟隨特性,故往往需要增加微分(D)作用,以加速對偏差信號變化趨勢的跟隨速度,并在偏差信號變得過大之前,在系統中引入一個有效的早期修正信號,這樣既可加快系統的動態響應,又可有效節約調節的時間。PID控制框圖如圖4所示。

圖3 PI控制框圖Fig.3 Configuration of PI
PID的控制規律為

圖4 PID控制框圖Fig.4 Configuration of PID
(6)
式中,kP、kI、kD分別為比例、積分、微分系數;e(t)為輸入偏差。kP和kI的大小可根據電動機參數,如電動機的直軸電感Ld、交軸電感Lq和電樞電阻Rs來確定。
2.2 積分分離式PID控制
積分分離式PID控制的思路是當偏差較大時,取消積分,以避免因積分的作用使得系統的穩定性降低的情況發生;而當誤差較小時,引入積分,取消凈差,以提高系統的控制精度。選擇積分分離式PID來替代傳統的PID控制器,可以減少因矢量控制系統的非線性引起的較大偏差信號所導致的波形大幅波動。在設計積分分離式PID控制器時,對輸入的信號進行離散化處理,不僅可減少非線性參數對電流跟隨的影響,而且由于積分的分離作用,當偏差較大時取消積分,還可避免因積分飽和產生的超調量;而當偏差接近給定值時,加入積分,可產生調節作用,系統又可得到較好的穩定性。
積分分離式PID可作如下數學描述:

kD[e(k)-e(k-1)]/T
(7)
式中,T為采樣時間;ξ為積分相的開環系數;
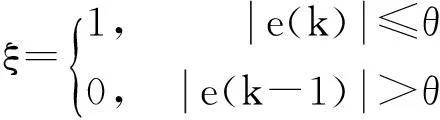
(8)

積分分離式PID控制框圖如圖5所示。
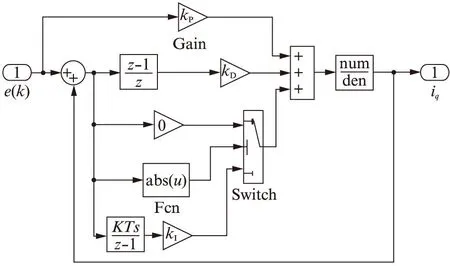
圖5 積分分離式PID控制框圖Fig.5 Configuration of integral separated PID
3仿真分析
本文研究的PMSM矢量控制系統的仿真實驗是建立在假設的理想化條件下,與實際情況有差別,但仿真有效地反映了矢量控制系統的性能趨勢,可作為實際開發過程中有價值的參考量。圖6給出了PMSM矢量控制系統仿真框圖。圖中包括電動機本體模塊、Clark變換模塊、Park變換模塊、PID調節器模塊、逆變器模塊和SVPWM模塊等。仿真分別采用PI、PID、積分分離式PID控制方式來驗證PMSM矢量控制系統的特性。3種控制方式均采用雙閉環調節,速度環均采用PI調節方式,具體參數如下:kP=0.32,kI=25;交軸電流環調節器參數kP=1.2,kI=28;直軸電流環調節器參數kP=9.8,kI=200;采用積分分離式PID和傳統PID控制方式的微分調節參數kD=0.2,采用ode45算法,允許誤差為0.001,仿真時間為0.2s。

圖6 永磁同步電動機矢量控制系統仿真模型Fig.6 Simulation model of vector control system of PMSM
本文采用的電動機參數如下: 額定電壓u=380V;額定功率P=7.5kW;額定轉速n=1500r/min;nP=2;RS=2.875Ω;Ld=0.65μH,Lq=0.105μH;ψ1=0.175Wb;J=1.8g·m2。
3.1 電動機空載啟動性能
圖7給出了系統空載啟動時,3種控制下Te、I和n的仿真曲線圖。
由圖7(a)可見,在積分分離式PID控制方式下,系統在t=10ms時轉矩達到穩定;而傳統PID控制方式下,系統在t=20ms時產生超調,當t=30ms時達到穩定;在PI控制方式下,系統在t=30ms時達到穩定且無超調量。因此,空載啟動時,積分分離式PID控制方式下系統的轉矩響應和恢復時間最快,傳統的PID控制方式次之且有超調,PI控制方式下的響應較慢。由7(b)可見,啟動電流在t=40ms后穩定為空載電流,且電流峰值在允許范圍內滿足矢量控制系統的要求。由圖7(c)可見,在積分分離式PID控制方式下,系統在t=10ms內達到給定參考轉速值,轉速響應較快;在傳統PID控制方式下,由于積分的作用,當t=20ms時系統產生超調,當t=40ms時達到給定參考轉速值;而在PI控制方式下,當t=30ms時系統達到給定參考轉速,無超調。由此可見,在積分分離式PID控制方式下系統的空載啟動性能較好。
3.2 電動機負載啟動和抗干擾能力
在3種控制方式下,系統在給定轉速n*= 1500r/min,恒定負載TL=5N·m下啟動;速度達到穩定后,當t=0.1s時突加負載轉矩TL=10N·m 的擾動。3種控制方式下的Te、I和n的仿真曲線如圖8所示。
由圖8(a)可見,當t=10ms時,在傳統PID控制方式下,系統轉矩有些波動,在0.1s內系統帶負載啟動與系統空載啟動的轉矩變化趨勢大致相同;當t=0.1s突加負載出現干擾時,Te未出現大的波動并迅速達到穩態。由圖8(b)可見,負載電流經短時波動后,當t=10ms時I穩定在6A,突加負載后I迅速穩定在12A,無大的波動。由圖8(c)可見,當系統突加負載時,3種方式控制方式下的n均有波動: 在積分分離式PID控制方式下,系統轉速波動2.6%(轉速最大值為1460r/min),
當t=0.13s時系統恢復額定轉速;在傳統的PID控制方式下,系統轉速波動5.3%(轉速最大值為 1420r/min),當t=0.15s時系統恢復額定轉速;在PI控制方式下,系統轉速波動6.6%(轉速最大值為 1400r/min),當t=0.14s時系統恢復額定轉速。由此可見,積分分離式PID控制方式較傳統PID和PI控制方式的啟動速度快,波動小,轉速恢復快,抗干擾能力強。

圖7 空載啟動時,3種PID控制器控制下,轉矩、轉速、電流與時間的關系Fig.7 Curve of torque and speed and current without load with three different PID
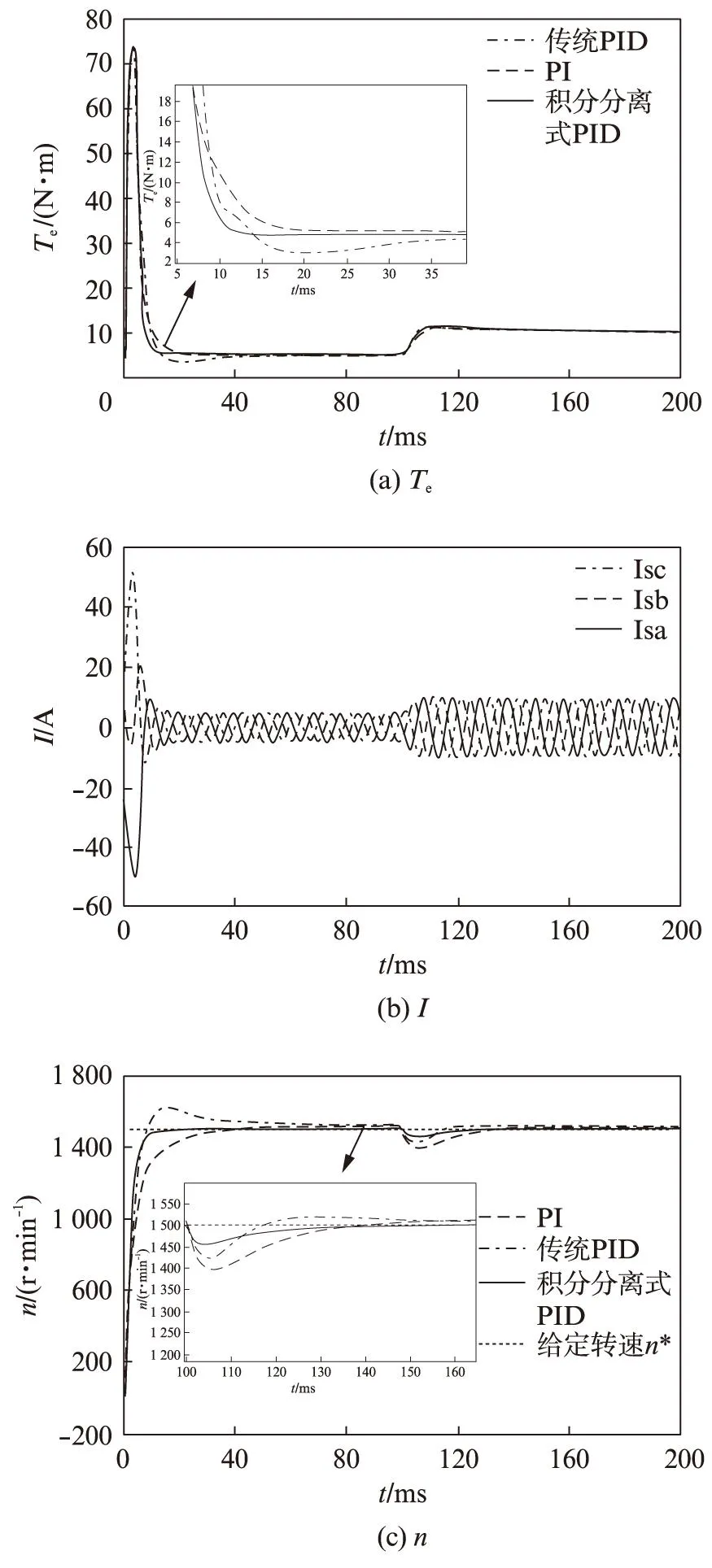
圖8 3種PID控制器控制下轉速、轉矩和電流曲線Fig.8 Curve of speed and torque and current with three different PID
3.3 電動機調速性能
在3種控制方式下,當t=0.10s時,電動機轉速由1500r/min突變為-500r/min,轉速響應波形如圖9所示。
由圖(9)可見,當t=0.10s時,電動機轉速突變為-500r/min,在積分分離式 PID控制方式下系統約在0.11s時到達給定參考轉速,調速較快。在傳統PID控制方式下,由于輸入偏差增大導致積分飽和,當t=0.12s時系統產生了超調;在PI控制方式下,當t=0.15s時系統穩定為參考轉速且無超調,調速稍慢。由此可見,3種控制方式中,采用積分分離式PID控制方式調速性能更優。
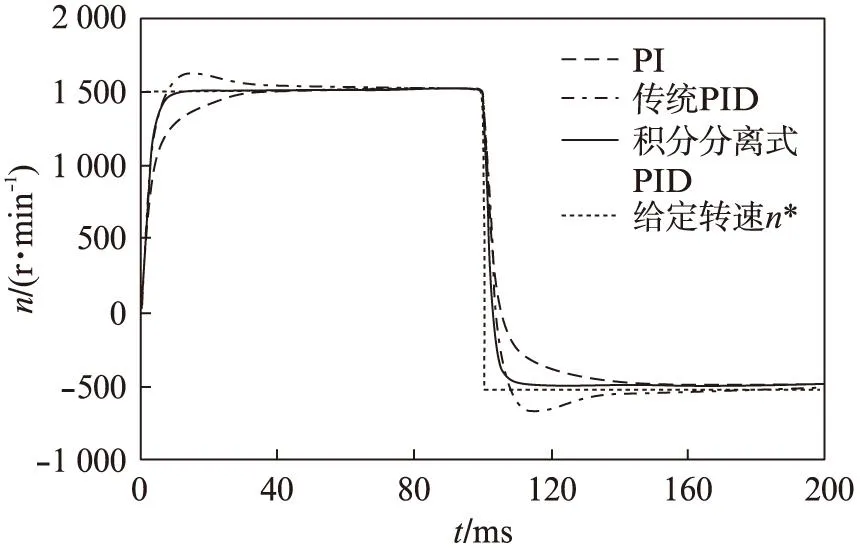
圖9 3種PID控制器控制下轉速突變時的轉速響應Fig.9 Response of speed when the reference change suddenly with three different PID
4結論
本文對按轉子磁場定向的永磁同步電機控制系統進行了理論分析和仿真,分析了3種PID控制方式對系統空載啟動、突加負載和給定參考轉速突變等狀況下的仿真結果:
(1) 在啟動速度上,與PI控制的矢量控制系統相比,在積分分離式PID和傳統PID的控制方式下系統啟動速度快;從產生的超調來看,采用積分分離式PID與PI控制的矢量控制系統無超調量,而傳統PID控制有超調。總體而言,采用積分分離式PID較傳統PID和PI的矢量控制系統啟動性能好。
(2) 在抗干擾能力上,采用積分分離式PID較傳統PID和PI控制的矢量控制系統轉速波動小、轉速恢復快,具有明顯的優勢。
(3) 在調速性能上,3種控制方式均能實現穩定調速,但采用PI控制方式響應速度稍慢,采用積分分離式PID控制方式有超調;就響應速度和超調量而言,積分分離式PID控制方式調速性能更優,可適用的范圍廣。
參考文獻:
[1]王曉遠,王曉光.盤式無鐵心永磁同步電機矢量控制技術分析[J].中國電機工程學報,2014,34(18): 2952-2959.
[2]趙輝,魯超,岳友軍,等.基于三電平逆變器的永磁同步電機控制策略研究[J].電氣自動化,2010,32(3): 1-3,44.
[3]劉賢興,卜言柱,胡育文,等.基于精確線性化解耦的永磁同步電機空間矢量調制系統[J].中國電機工程學報,2007,27(30): 55-59.
[4]王恩德,黃聲華.表貼式永磁同步電機伺服系統電流環設計[J].中國電機工程學報,2012,32(33): 82-88,179.
[5]楊圣蓉,王劍平,張果.基于SVPWM的異步電機矢量控制及調節器設計實現[J].電氣自動化,2015,37(1): 17-20.
[6]程啟明,王映斐,胡曉青,等.基于SVPWM的永磁同步電機矢量控制系統的建模與仿真[J].上海電力學院學報, 2012, 28(4): 329-335.
[7]Zhao Gang,Wu Fozhu.The simulation study based vector modulation method for PMSM control system[C]∥Tianjin Key laboratory for Control Theory & Applications in Complicated Systems.Tianjin,China: IEEE,2011: 217-219.
[8]陳娟,何英杰,王新宇,等.三電平空間矢量與載波調制策略統一理論的研究[J].中國電機工程學報,2013,33(9): 71-78.
[9]王偉華,肖曦.永磁同步電機高動態響應電流控制方法研究[J].中國電機工程學報,2013,33(21): 117-123,200.
[10]王萌,楊家強,張翔,等.一種表貼式永磁同步電機電流矢量閉環I/f控制方法[J].中國電機工程學報,2015,35(10): 2513-2521.
[11]Kamalaselvan A,Prakash S L.Modeling simulation and analysis of closed loop speed control of PMSM drive system[C]∥2014 International Conference on Circuit,Power and Computing Technologies[ICCPCT].Trichirappalli,India: IEEE,2014: 692-697.
[12]肖衛文,熊芝耀,李世耀,等.基于變參數PI的永磁同步電動機矢量控制系統[J].電力電子技術,2009,43(4): 32-33.
[13]楊立永,付嚴偉.抗積分飽和永磁同步電動機弱磁控制策略研究[J].冶金自動化,2012(S2): 185-188.
[14]韓明文,劉軍.基于積分分離的永磁同步直線電機PID控制控制系統[J].電機與控制應用,2013,40(1): 22-24,34.
[15]陸華才,徐月同,楊偉民,等.永磁直線同步電機進給系統模糊PID控制[J].電工技術學報,2007,22(4): 59-63.