基于絕對節(jié)點坐標法的柔性多體系統(tǒng)靈敏度分析
2016-01-28 03:43:34王鐵成陳國平孫東陽
振動與沖擊 2015年24期
王鐵成, 陳國平, 孫東陽
(1.南京航空航天大學 機械結(jié)構(gòu)力學及控制國家重點實驗室,南京 210016; 2.重慶大學 航空航天學院 ,重慶 400044)
?
基于絕對節(jié)點坐標法的柔性多體系統(tǒng)靈敏度分析
王鐵成1, 陳國平1, 孫東陽2
(1.南京航空航天大學 機械結(jié)構(gòu)力學及控制國家重點實驗室,南京210016; 2.重慶大學 航空航天學院 ,重慶400044)
機械系統(tǒng)優(yōu)化設(shè)計可以提高機械系統(tǒng)的精度和穩(wěn)定性。為了避免優(yōu)化參數(shù)選擇的盲目性,提高設(shè)計效率,進行近似分析和預測設(shè)計趨勢,首先就需要對系統(tǒng)參數(shù)進行靈敏度分析。因此,靈敏度分析已經(jīng)成為機械系統(tǒng)動力學分析與優(yōu)化設(shè)計的橋梁,并成為機械系統(tǒng)優(yōu)化設(shè)計的核心問題。
靈敏度計算方法主要有直接微分法和伴隨變量法。直接微分法是通過計算系統(tǒng)的運動學或動力學方程對設(shè)計變量的偏導數(shù),得到目標函數(shù)對設(shè)計變量的靈敏度。潘振寬等[1]采用直接微分法對多剛體系統(tǒng)進行了靈敏度分析。針對遞推形式建立的鏈狀多體系統(tǒng),Haug等[2]采用直接微分法對其進行了靈敏度分析。直接微分法的優(yōu)點是直觀,易于理解,但隨著系統(tǒng)設(shè)計變量的增多,求解規(guī)模成倍增長,導致靈敏度求解的效率降低。伴隨變量法是通過引入伴隨變量,使多設(shè)計變量系統(tǒng)靈敏度分析計算效率得到提高,該方法已經(jīng)在多體系統(tǒng)的靈敏度分析中得到了重視和應用[3]。Etman等[4]采用伴隨變量法對多體系統(tǒng)動態(tài)特性進行了靈敏度分析。Li等[5]和Maly等[6]基于隱式微分代數(shù)方程,推導了多體系統(tǒng)靈敏度分析的伴隨變量法。目前,多體系統(tǒng)靈敏度分析大多是針對剛體系統(tǒng),柔性多體系統(tǒng)靈敏度分析的研究還比較少。主要原因是柔性多體系統(tǒng)具有高維數(shù)和強非線性特性,導致分析相對困難。雖然浮動坐標法是最常用的一種柔性多體系統(tǒng)建模方法,但是該方法基于小變形假設(shè),用于分析存在大變形的柔性多體系統(tǒng)會帶來較大誤差。Shabana等[7]提出了多柔性體絕對節(jié)點坐標建模方法,該方法的理論基礎(chǔ)是有限元和連續(xù)介質(zhì)力學[8-9],由該方法推導的多體系統(tǒng)方程的質(zhì)量陣為常數(shù)矩陣,且不存在科氏力和離心力項。為了對存在大變形的柔性多體系統(tǒng)進行靈敏度分析,同時考慮到多變量情況下伴隨變量法有更高的計算效率,本文采用伴隨變量法對基于絕對節(jié)點坐標法建立的柔性多體系統(tǒng)進行了靈敏度分析,并將其計算結(jié)果與直接法的計算結(jié)果進行了比較。
1絕對節(jié)點坐標建模的動力學方程
基于絕對節(jié)點坐標法的一維兩節(jié)點梁單元如圖1所示,單元上任意點的位置矢量可表示為:
(1)
式中:e為單元節(jié)點坐標,S是定義在總體坐標系上的形函數(shù),分別表示如下[7]
(2)

圖1 平面梁單元Fig.1Plane beam element
(3)
式中:s1=1-3ξ2+2ξ3,s2=ξ-3ξ2+2ξ3,s3=3ξ2-2ξ3,s4=l(ξ3-ξ2),這里ξ=x/l。
根據(jù)式(1),單元的動能可表示為
(4)
式中:Me=∫ρSTSdV,為單元的常數(shù)質(zhì)量陣,ρ和V分別是材料的密度和單元的體積。
根據(jù)連續(xù)介質(zhì)力學理論,單元的總應變能包含彎曲應變能Uel和軸向拉伸應變能Uet,表示為
(5)
式中:εi和κ分別為單元應變和曲率。
基于虛功原理建立單元的動力學方程表示為
(6)
其中:Qe為單元受到的廣義外力,Qk為單元廣義彈性力。
單元廣義彈性力由單元應變能對單元坐標求偏導獲得,即
(7)
式中:Kl和Kt分別表示單元的軸向拉伸非線性剛度陣和彎曲線性剛度陣。
則含約束的柔性體k的動力學方程為
(8)

其中:Be為布爾矩陣。
2靈敏度分析
伴隨變量法計算靈敏度,需要先求解動力學方程,然后根據(jù)動力學計算結(jié)果,逆向求解伴隨變量為未知量的微分方程組,其中,動力學計算結(jié)果需要擬合函數(shù),可使在伴隨變量微分方程的數(shù)值計算時,能取得在所計算時間內(nèi)的任意時刻的函數(shù)值。
本文選用積分型目標函數(shù)對絕對節(jié)點坐標法建模的柔性多體系統(tǒng)進行靈敏度分析。目標函數(shù)設(shè)為
(9)
狀態(tài)變量和設(shè)計變量分別為
q=[q1q2…qn]T
(10)
b=[b1b2…bl]T
(11)
多體系統(tǒng)動力學方程和約束方程分別為
(12)
Φ(q,b,t)=0
(13)
為了計算靈敏度,先用萊布尼茲法對目標函數(shù)求導,得到
(14)
(15)
(16)
引入伴隨變量μ和ν,分別乘以式(12)和式(13)并積分得
(17)
(18)
式(17)和式(18)對設(shè)計變量求導得
ΦTqbλ+ΦTqqλqb-Qb-Qqqb)dt=0
(19)
(20)
(21)
其中
將式(15),式(20)和式(21)相加得
(22)
選取伴隨變量使得積分式中qb和λb前的系數(shù)分別等于零,得如下關(guān)于伴隨變量的微分代數(shù)方程
(23)
Φqμ-Fλ=0
(24)

(25)
再由式(25)推出下面兩式
(26)
(27)
采用絕對節(jié)點坐標法建立的柔性多體系統(tǒng)動力學方程,質(zhì)量矩陣M為滿秩常數(shù)陣,進一步可得到
(28)
(29)
根據(jù)初始條件式(28)、(29),逆向求解關(guān)于伴隨變量的微分代數(shù)方程組(23)、(24),將計算結(jié)果代入式(16),得目標函數(shù)靈敏度

(30)
3算例分析
本文以受重力作用的矩形截面柔性單擺系統(tǒng)為研究對象,如圖2所示。
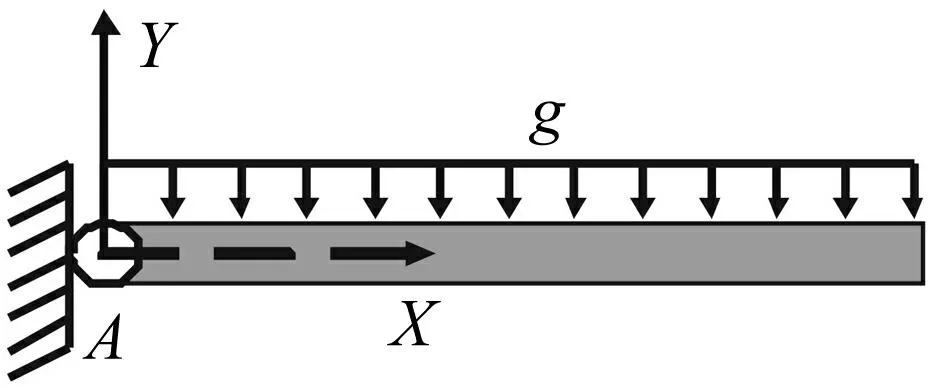
圖2 柔性單擺Fig.2 Flexible simple pendulum
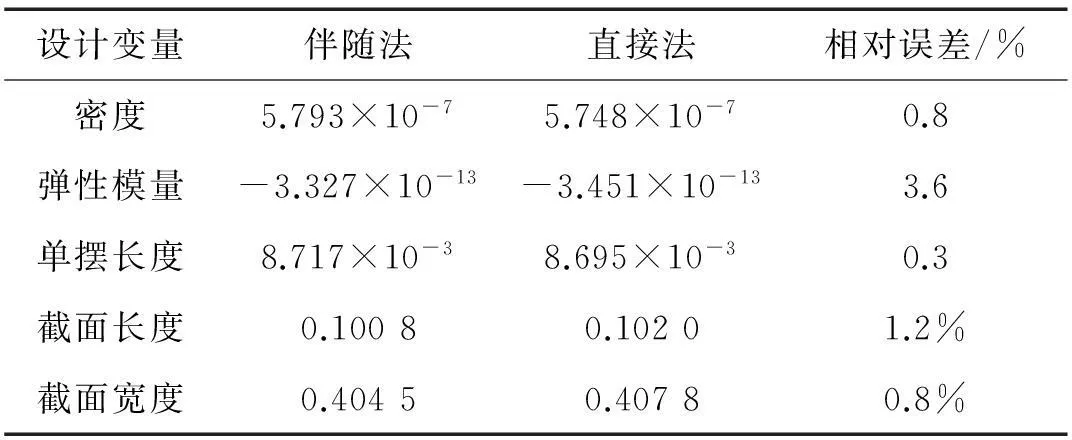
表1 兩種方法的靈敏度計算結(jié)果
表1給出了分別采用伴隨變量法和直接微分法得到的目標函數(shù)對單擺的密度、彈性模量、長度、截面長度和寬度的靈敏度。同時對比了兩種方法計算結(jié)果的相對誤差,可以發(fā)現(xiàn),其相對誤差都在4%以內(nèi)。而且可以發(fā)現(xiàn),目標函數(shù)對單擺長度、截面長度和寬度的變化比較敏感,而密度和彈性模量對目標函數(shù)的影響很小。采用直接微分法計算的單擺末端橫向位移對五個設(shè)計變量的靈敏度如圖3~圖7所示,由圖可知五個設(shè)計變量中長度的變化對末端橫向位移的影響最明顯,這與基于目標函數(shù)的靈敏度分析結(jié)論一致。

圖3 x對ρ的靈敏度Fig.3Thesensitivityofxwithrespecttoρ圖4 x對E的靈敏度Fig.4ThesensitivityofxwithrespecttoE圖5 x對l的靈敏度Fig.5Thesensitivityofxwithrespecttol
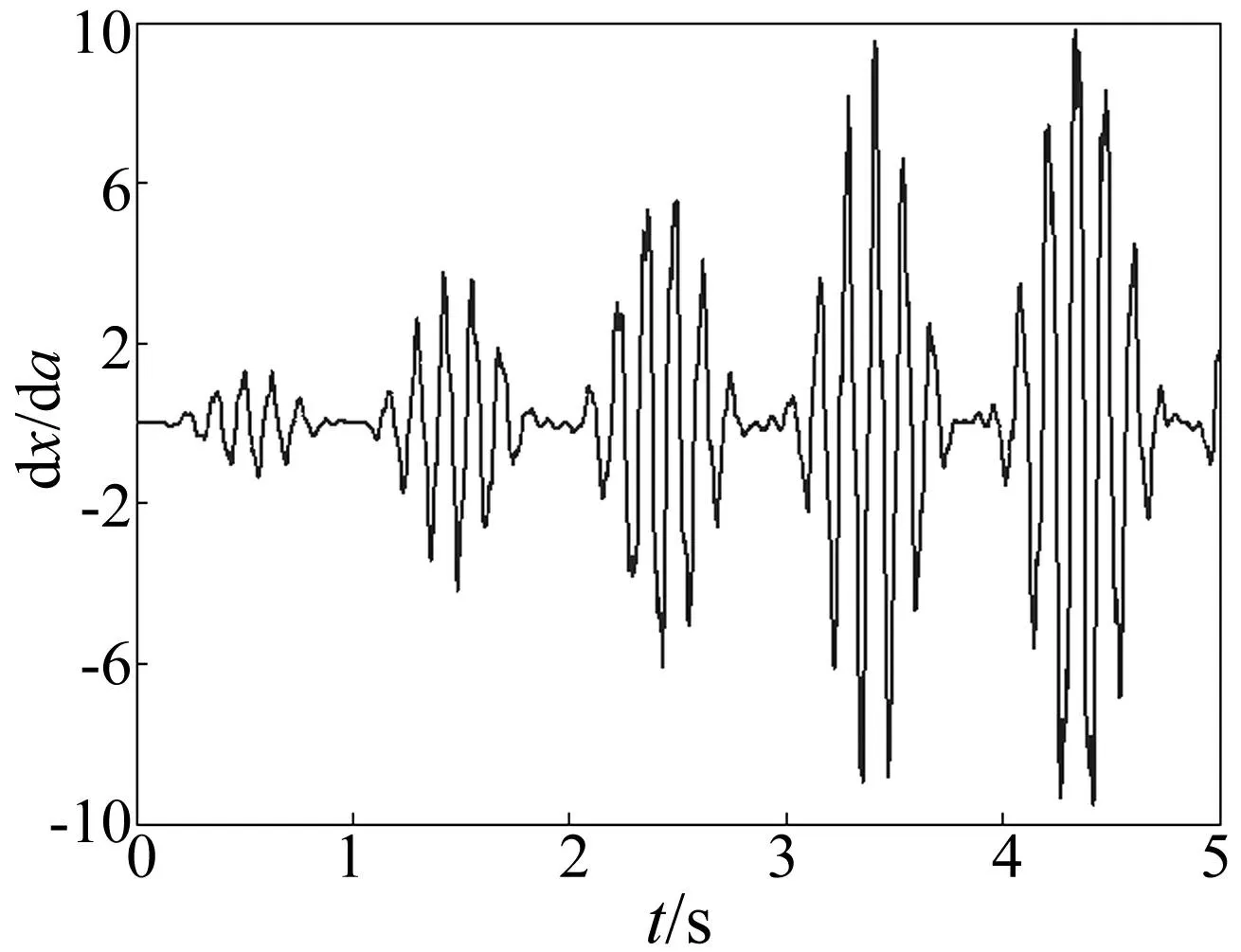
圖6 x對a的靈敏度Fig.6 The sensitivity of x with respect to a
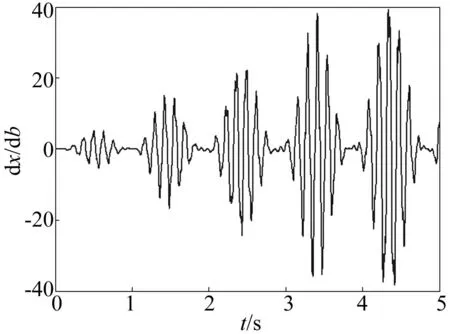
圖7 x對b的靈敏度Fig.7 The sensitivity of x with respect to b
為了分析伴隨變量法和直接微分法的計算效率,對比了五個設(shè)計變量情況下兩種方法的計算時間,如表2所示。 可以看出,考慮一個設(shè)計變量時,伴隨變量法所用計算時間多于直接微分法,約為直接微分法計算時間的2倍;考慮兩個設(shè)計變量時,兩種方法的計算時間基本相當;三個設(shè)計變量時,伴隨變量法所用時間約為直接微分法的75%,當五個設(shè)計變量的情況時,伴隨變量法的計算時間約為直接法計算時間一半。由此可見,隨著設(shè)計變量的增加,伴隨法的計算效率將高于直接微分法。這主要是因為隨著設(shè)計變量的增多,伴隨變量法隨之增加的計算時間主要就在靈敏度積分函數(shù)上,在此算例中大概耗時25 s左右,而直接微分法隨著設(shè)計變量增加,需要再計算一組微分方程,勢必增加求解時間。
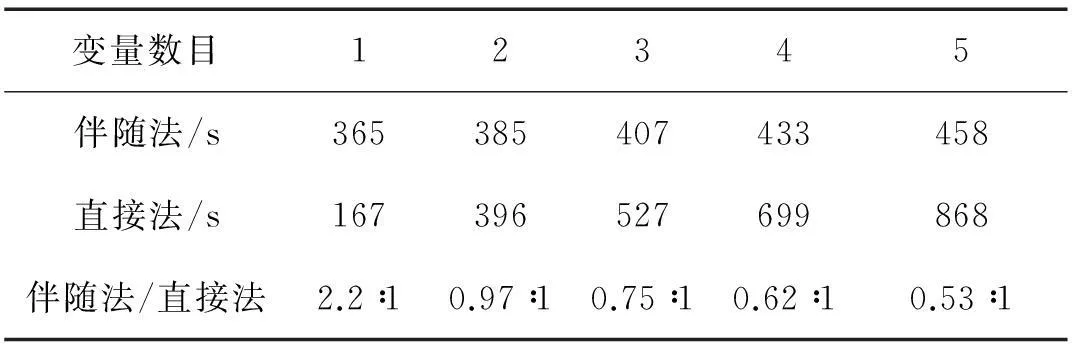
表2 兩種方法的計算時間
4結(jié)論
本文對基于絕對節(jié)點坐標法建立的柔性多體系統(tǒng)進行了靈敏度分析。以矩形截面的柔性單擺系統(tǒng)為例,以工程上常用的積分型函數(shù)為目標函數(shù),使用伴隨變量法和直接微分法分別計算了目標函數(shù)對柔性體長度、彈性模量、密度、截面的長度和寬度的靈敏度。通過分析發(fā)現(xiàn),兩種方法計算結(jié)果的相對誤差均在4%以內(nèi),因此,計算結(jié)果是可靠的。同時可以發(fā)現(xiàn)隨著設(shè)計變量的增加,伴隨變量法比直接法有更高的計算效率。為工程上,采用伴隨變量法對存在大變形的柔性多體系統(tǒng)的進行靈敏度分析提供了理論依據(jù)。
參 考 文 獻
[1] 潘振寬,丁潔玉,王鈺. 基于隱式微分/代數(shù)方程的多體系統(tǒng)動力學設(shè)計靈敏度分析方法[J]. 動力學與控制,2004, 2(2): 66-69.
PAN Zhen-kuan, DING Jie-yu, WANG Yu. Design sensitivity analysis of multibody system dynamics descrided by implicit differential/algebraic[J]. Journal of Dynamics and Control,2004, 2(2): 66-69.
[2] Haug E J,Neel K M, Krishnasawami P. Design sensitivity analysis and optimization of dynamically driven systems[M]. Computer Aided Analysis and Optim-ization of Mechanical System Dynamics.Springer Berlin Heidelberg,1983:555-636.
[3] 康新忠, 王寶元. 機械系統(tǒng)動態(tài)優(yōu)化設(shè)計的靈敏度方法[J]. 機械工程學報, 1990, 13(1): 18-23.
KANG Xin-zhong, WANG Bao-yuan. Sensitivity analysis method of the dynamic optimal design for mechanical systems[J]. Journal of Vibration Engineering,1990, 13(1): 18-23.
[4] Etman L F P, Van Campen D H, Schoofs A J G. Optimization of multibody systems using approximation concepts[C]//IUTAM.Symposium on Optimization of Mechanical Systems. Netherlands:Springer,1996:81-88.
[5] Li S, Petzold L. Software and algorithms for sensitivity analysis of large-scale differential-algebraic systems[J]. Journal of Computational and Applied Mathematics, 2000, 125:131-145.
[6] Maly T, Pctzold L R. Numerical methods and software for sensitivity analysis of differential-algebraic systems[J]. Applied Numerical Mathematics, 1996, 20: 57-59.
[7] Shabana A. An absolute nodal coordinates formulation for the large rotation and deformation analysis of flexible bodies[R]. University of Illionis at Chicago, 1996.
[8] Shabana A. Computational continuum mechanics[M]. New York: Cambridge University Press, 2011.
[9] Bonet J, Wood R. Nonlinear continuum mechanics for finite element analysis[M]. Cambridge: Cambridge University Press, 1997.
第一作者 王鐵成 男,博士生,1979年生
摘要:針對多個設(shè)計變量情況下的柔性多體系統(tǒng)靈敏度分析,采用伴隨變量法對基于絕對節(jié)點坐標法建立的柔性多體系統(tǒng)進行了研究。為了驗證的該方法的計算效率,分別采用直接微分法和伴隨變量法對受重力作用的柔性單擺進行了研究, 結(jié)果表明:這兩種方法計算結(jié)果的誤差很小,隨著設(shè)計變量數(shù)量的增加,伴隨變量法有更高的計算效率。
關(guān)鍵詞:多體系統(tǒng);絕對節(jié)點坐標法;靈敏度;伴隨變量法
Sensitivity analysis of flexible multibody systems based on absolute nodal coordinate formulation
WANGTie-cheng1,CHENGuo-ping1,SUNDong-yang2(1. The State Key Laboratory of Mechanics and Control of Mechanical Structures, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;2. College of Aerospace Engineering, Chongqing University, Chongqing 400044, China)
Abstract:For multiple design variables, an adjoint variable method was applied in sensitivity analysis of flexible multibody systems based on the absolute node coordinate formulation. In order to verify the computational efficiency of the method, a flexible pendulum under gravity was analysed by using the direct differentiation method and the adjoint variable method respectively. The results show that the errors of the two methods are both small, and the adjoint variable method has higher computational efficiency with the increase of design variables.
Key words:multibody system; sensitivity; absolute node coordinates formulation; adjoint variable method
中圖分類號:O313.7
文獻標志碼:A DOI:10.13465/j.cnki.jvs.2015.24.015
通信作者陳國平 男,教授,博士生導師,1956年生
收稿日期:2014-09-04修改稿收到日期:2014-11-26
基金項目:江蘇高校優(yōu)勢學科建設(shè)工程資助項目