磁流變車(chē)輛懸架系統(tǒng)的混沌振動(dòng)分析
2016-01-28 03:44:09黃苗玉王恩榮閔富紅
振動(dòng)與沖擊 2015年24期
黃苗玉, 王恩榮, 閔富紅
(南京師范大學(xué) 電氣與自動(dòng)化工程學(xué)院,南京 210042)
?
磁流變車(chē)輛懸架系統(tǒng)的混沌振動(dòng)分析
黃苗玉, 王恩榮, 閔富紅
(南京師范大學(xué) 電氣與自動(dòng)化工程學(xué)院,南京210042)
基于磁流變阻尼器(Magneto-Rheological Damper, MRD)的半主動(dòng)懸架,因其響應(yīng)速度快、減振效果好、功耗低等優(yōu)點(diǎn),已成為國(guó)內(nèi)外學(xué)者廣泛關(guān)注的新一代智能車(chē)輛懸架系統(tǒng)[1]。然而,MRD是通過(guò)直流磁場(chǎng)控制來(lái)實(shí)現(xiàn)阻尼力無(wú)級(jí)調(diào)節(jié)的減振器件,具有很強(qiáng)的滯環(huán)特性,使得MR懸架系統(tǒng)會(huì)表現(xiàn)出多值、非光滑的非線性特性,且在一定的載荷、激勵(lì)和頻率范圍內(nèi)可能產(chǎn)生混沌振動(dòng)等復(fù)雜的非線性動(dòng)力學(xué)行為[2],這是目前影響MR懸架系統(tǒng)得到實(shí)際推廣應(yīng)用的重要制約因素之一。為此,揭示出MR懸架系統(tǒng)的混沌運(yùn)動(dòng)特性,進(jìn)而綜合出具有可靠穩(wěn)定性和實(shí)時(shí)控制精度的MR懸架系統(tǒng)半主動(dòng)控制器具有重要意義。
目前,針對(duì)傳統(tǒng)的被動(dòng)懸架車(chē)輛系統(tǒng)的非線性動(dòng)力學(xué)分析,已開(kāi)展了一定的研究工作[3-7]。但由于選取的被動(dòng)懸架系統(tǒng)模型相對(duì)簡(jiǎn)單,不能進(jìn)行阻尼力的控制調(diào)節(jié),因此無(wú)法改善車(chē)輛的懸架性能。隨著人們對(duì)車(chē)輛駕乘舒適性和運(yùn)行安全性的要求不斷提高,MR懸架系統(tǒng)的半主動(dòng)控制迅速成為研究熱點(diǎn),充分掌握MR懸架系統(tǒng)的動(dòng)力學(xué)特性是設(shè)計(jì)其半主動(dòng)控制器的重要理論基礎(chǔ),已初步取得了一些成果[8-10]:吳參等[8]應(yīng)用MRD的測(cè)驗(yàn)數(shù)據(jù),采用擬合方法得到了修正的Bouc-wen阻尼力-速度(F-v)模型,分析了2-DoF 1/4車(chē)輛MR懸架系統(tǒng)的頻率響應(yīng)特性和經(jīng)由環(huán)面破裂通向混沌的途徑;張海龍等[9]建立了基于修正Bouc-wen滯環(huán)F-v模型的2-DoF 1/4車(chē)輛MR懸架系統(tǒng)的動(dòng)力學(xué)方程,研究了系統(tǒng)在單頻激勵(lì)下的動(dòng)力學(xué)特性,確定了周期運(yùn)動(dòng)與混沌運(yùn)動(dòng)出現(xiàn)的頻率范圍,但是系統(tǒng)并未考慮輪胎的阻尼特性;吳瑩等[10]以MR整車(chē)懸架系統(tǒng)為研究對(duì)象,從路面激勵(lì)頻率的角度進(jìn)行了仿真分析,得到了系統(tǒng)垂直、側(cè)傾、俯仰運(yùn)動(dòng)形式的多種運(yùn)動(dòng)狀態(tài),由于選取的阻尼器模型不含電流項(xiàng),無(wú)法應(yīng)用于MR半主動(dòng)懸架系統(tǒng)的控制器設(shè)計(jì)。上述研究成果雖能在一定程度上反映MR懸架系統(tǒng)在路面激勵(lì)下的混沌運(yùn)動(dòng)特性,但因所取的研究參數(shù)比較單一,且未考慮半主動(dòng)控制策略對(duì)MR懸架系統(tǒng)的影響,不能系統(tǒng)地揭示MR懸架系統(tǒng)產(chǎn)生混沌運(yùn)動(dòng)的機(jī)理。
基于以上分析,為全面揭示MR車(chē)輛懸架系統(tǒng)產(chǎn)生混沌運(yùn)動(dòng)的機(jī)理,本文選取王恩榮教授提出的MRD滯環(huán)阻尼力-速度(F-v)模型,建立了考慮輪胎阻尼特性的2-DoF 1/4車(chē)輛MR懸架系統(tǒng)動(dòng)力學(xué)模型。首先,應(yīng)用分岔圖、最大Lyapunov指數(shù)、相平面、Poincaré截面等方法,研究路面諧波激勵(lì)頻率和幅度參數(shù)對(duì)MR懸架系統(tǒng)發(fā)生混沌的影響。其次,將半主動(dòng)控制策略轉(zhuǎn)化為直流控制電流的取值,來(lái)分別研究懸架系統(tǒng)在兩個(gè)固有頻段內(nèi)時(shí)隨電流參數(shù)變化產(chǎn)生周期振動(dòng)和混沌振動(dòng)的內(nèi)在規(guī)律,為進(jìn)一步完善MR懸架系統(tǒng)的半主動(dòng)控制器設(shè)計(jì)提供了理論指導(dǎo)。
11/4車(chē)輛MR懸架系統(tǒng)模型
車(chē)輛懸架是由彈簧、阻尼器、輪胎等非線性器件組成的復(fù)雜系統(tǒng),用以緩沖和衰減路面沖擊對(duì)車(chē)輛產(chǎn)生的振動(dòng)。當(dāng)僅考慮汽車(chē)懸架系統(tǒng)的平順性,即車(chē)輛垂直方向的振動(dòng)特性時(shí),1/4車(chē)輛懸架系統(tǒng)模型是公認(rèn)的。為建立該系統(tǒng)的動(dòng)力學(xué)方程,根據(jù)麥弗遜式懸架結(jié)構(gòu)(阻尼器做懸架的主要減振部件),需做出如下假設(shè):1汽車(chē)左右輪的不平度一樣,關(guān)于軸線嚴(yán)格對(duì)稱;2輪胎的剛度和懸架彈簧線性化處理;3車(chē)身為剛性,整車(chē)質(zhì)量在懸架上的分配達(dá)到一定數(shù)值,如式(1)所示,式中ρy為繞車(chē)體縱軸的回轉(zhuǎn)半徑數(shù)值,a和b是前后車(chē)輪到整車(chē)重心的距離[10]。
ρy/(ab)=1
(1)
基于以上假設(shè),圖1示出了2-DoF1/4車(chē)輛MR懸架系統(tǒng)模型[11]。其中,ms、mu分別為1/4車(chē)身質(zhì)量和輪胎質(zhì)量,ks、kt分別為懸架系統(tǒng)和車(chē)輪的彈性系數(shù),ct為車(chē)輪阻尼系數(shù),xs、xu分別為車(chē)身和車(chē)輪的垂直位移,xin為路面激勵(lì),F(xiàn)d為MRD輸出的可控阻尼力。根據(jù)牛頓運(yùn)動(dòng)定律,2-DoF 1/4車(chē)輛MR懸架系統(tǒng)的動(dòng)力學(xué)方程為:

(2)
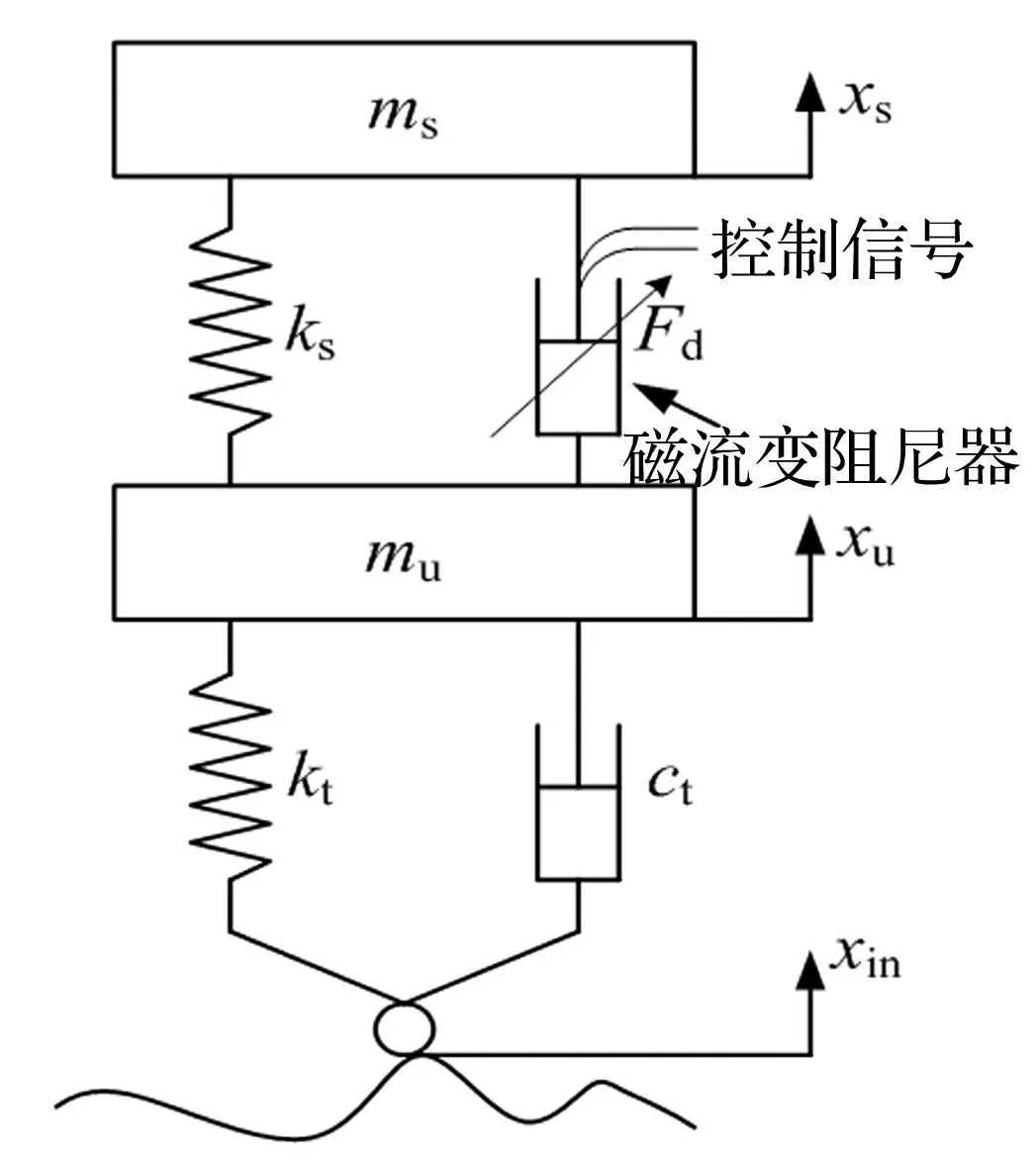
圖1 2-DoF 1/4車(chē)輛MR懸架模型Fig.1 2-DOF quarter-vehicle model of MR suspension
這里,MRD的滯環(huán)阻尼力-速度(F-v)模型的選取是MR半主動(dòng)懸架控制系統(tǒng)設(shè)計(jì)的關(guān)鍵環(huán)節(jié)之一。高精度的MRD滯環(huán)F-v模型不僅有助于準(zhǔn)確地揭示MRD的動(dòng)力學(xué)特性,而且有助于設(shè)計(jì)實(shí)時(shí)性高、控制效果好的半主動(dòng)控制策略。在已發(fā)表的眾多MRD滯環(huán)F-v模型中,王恩榮提出的基于Sigmoid函數(shù)的通用F-v模型[11],其特性曲線如圖2所示,不僅能準(zhǔn)確地描述MRD直流電流控制的非線性飽和特性,而且能準(zhǔn)確描述MRD的滯環(huán)特性,表示為:
(3)
式中:c(i)是MRD依賴于直流控制電流i的控制增益函數(shù),表示為:
(4)
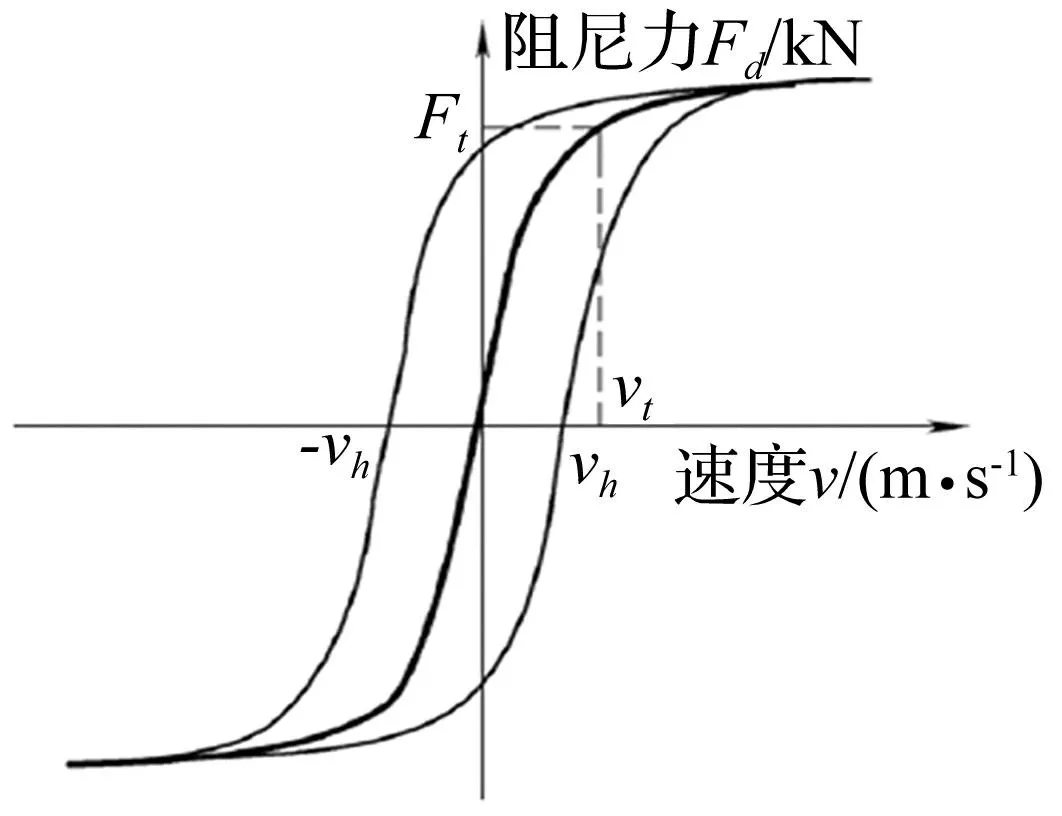
圖2 MRD滯環(huán)F-v特性曲線Fig.2 Thehysteretic F-v characteristic of MRD
式中:
(6)
α=a0/(1+k0vm)
(7)
kv=k1e-a3vm
(8)
(9)
式中:f0,a0,…,a3,k0,…,k3均為正的常數(shù),I0為任意常數(shù)。參變量vh表示阻尼力過(guò)零點(diǎn)的速度,即滯環(huán)寬度的一半,α表示滯環(huán)的斜率,kv是激勵(lì)性質(zhì)變化對(duì)阻尼力的影響系數(shù),vm表示激勵(lì)信號(hào)的峰值速度,隱含了激勵(lì)性質(zhì)(幅值和頻率)信息。

(1+k2/(1+e-a2(i+I0))-k2/(1+e-a2I0))×
(10)
式中:x1、x2為車(chē)身垂直位移、速度;x3、x4為車(chē)輪垂直位移、速度;x為車(chē)身與車(chē)輪的相對(duì)位移,即MRD阻尼器活塞的相對(duì)位移;
本文對(duì)CARRERA公司研發(fā)的用于車(chē)輛懸架的一款MRD進(jìn)行了性能測(cè)試研究,并辨識(shí)出如表1所示的模型參數(shù)[12]。
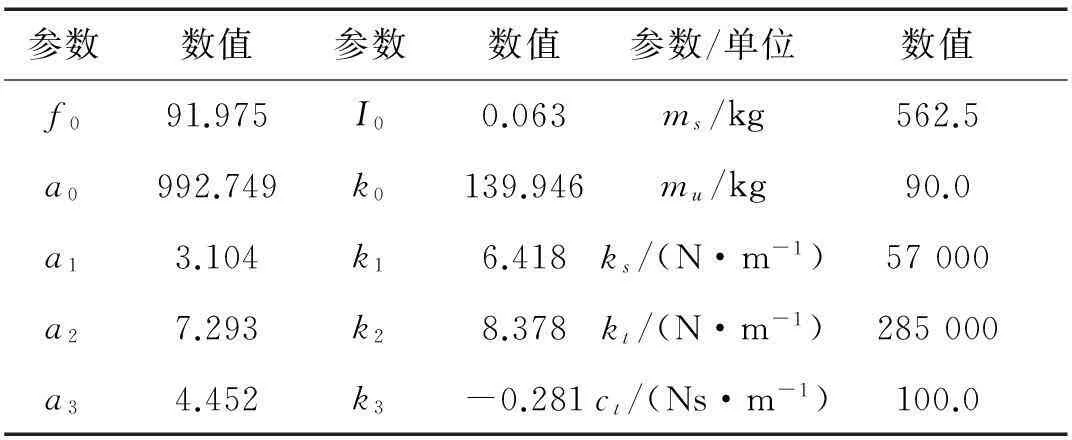
表1 MRD辨識(shí)參數(shù)及車(chē)輛懸架系統(tǒng)參數(shù)
2路面激勵(lì)下MR懸架系統(tǒng)的動(dòng)力學(xué)分析
路況是導(dǎo)致車(chē)輛振動(dòng)的重要激勵(lì)源,車(chē)輛荷載和周?chē)h(huán)境的長(zhǎng)期作用會(huì)導(dǎo)致路面產(chǎn)生持久性損壞(車(chē)轍)或疲勞破壞(裂縫),從而使路面結(jié)構(gòu)發(fā)生變形,路面的不平整反過(guò)來(lái)又會(huì)激勵(lì)車(chē)輛產(chǎn)生振動(dòng),從而嚴(yán)重影響行車(chē)的安全性與舒適性。由此可見(jiàn),研究路面對(duì)車(chē)輛懸架非線性動(dòng)力行為的激勵(lì)作用,不僅能夠揭示車(chē)輛產(chǎn)生混沌振動(dòng)的機(jī)理,還能為車(chē)輛系統(tǒng)設(shè)計(jì)與路況建設(shè)提供有益的理論依據(jù)。
在車(chē)輛振動(dòng)研究領(lǐng)域,一般采用正弦周期、隨機(jī)路面、減速帶和擬脈沖等激勵(lì)信號(hào)來(lái)模擬實(shí)際路況,以進(jìn)行車(chē)輛懸架系統(tǒng)振動(dòng)響應(yīng)特性的研究。其中,正弦激勵(lì)信號(hào)可以從頻率和幅值兩方面描述實(shí)際路面情況,因此得到廣泛的應(yīng)用。本文選取xin=Asin(2πf·t)為激勵(lì)信號(hào),控制電流取值i=0.5 A,車(chē)輛懸架各參數(shù)見(jiàn)表1。采用變步長(zhǎng)的Runge-Kutta113算法從頻率和幅值兩方面分別對(duì)MR懸架系統(tǒng)進(jìn)行數(shù)值仿真。
2.1激勵(lì)頻率影響
實(shí)際路面擾動(dòng)的幅值通常為1~10 cm,幅值越大,表明當(dāng)前路況越糟糕,對(duì)懸架系統(tǒng)的不利影響越嚴(yán)重。當(dāng)懸架系統(tǒng)幅值保持不變,但車(chē)速發(fā)生變化時(shí),路面對(duì)車(chē)輛的激勵(lì)頻率將隨之發(fā)生變化。因此,本文考慮較差的路況,取A=8 cm,并針對(duì)人體敏感的0~8 Hz頻域進(jìn)行仿真分析。圖3示出了MR懸架系統(tǒng)的分岔圖和最大Lyapunov指數(shù),從圖中可以看出,當(dāng)激勵(lì)頻率f從0 Hz增加到8 Hz的過(guò)程中,簧載速度x2呈現(xiàn)出較為復(fù)雜的動(dòng)力學(xué)現(xiàn)象,其中比較明顯的有倍周期分岔、切分岔和陣發(fā)性混沌[13]。
為了更加清晰地呈現(xiàn)演化過(guò)程,將激勵(lì)頻率f限制在3.2~5.2 Hz和5.6~7.2 Hz區(qū)間內(nèi),得到如圖4所示的低頻和中頻局部分岔圖。由圖可知,當(dāng)f<3.34時(shí),Lyapunov指數(shù)小于零,MR懸架系統(tǒng)處于穩(wěn)定周期1運(yùn)動(dòng)狀態(tài);當(dāng)f=3.34 Hz時(shí),系統(tǒng)經(jīng)倍周期分岔轉(zhuǎn)變?yōu)橹芷?、周期4運(yùn)動(dòng);當(dāng)f在4.23~5 Hz之間,對(duì)應(yīng)的Lyapunov指數(shù)正負(fù)跳變,系統(tǒng)出現(xiàn)大面積混沌區(qū)域,期間伴隨著陣發(fā)性混沌出現(xiàn)零散的周期窗口[14-15],其中主周期窗口的頻率區(qū)間為4.49~4.56 Hz;在f=5.0 Hz時(shí),系統(tǒng)通過(guò)切分岔的方式轉(zhuǎn)變?yōu)橐灾芷?開(kāi)始的倍周期分岔運(yùn)動(dòng),由于在這之前的混沌運(yùn)動(dòng)狀態(tài)已經(jīng)暗示了周期2狀態(tài)即將產(chǎn)生,故物理學(xué)上將這種不規(guī)則的混沌運(yùn)動(dòng)稱為“湍流相”。當(dāng)f=5.98 Hz時(shí),由切分岔產(chǎn)生的倍周期運(yùn)動(dòng)結(jié)束,MR懸架系統(tǒng)再次進(jìn)入短暫的混沌狀態(tài),并在f=6.47 Hz處,以倒倍周期分岔的方式從周期8運(yùn)動(dòng)逐漸轉(zhuǎn)向穩(wěn)定的周期1運(yùn)動(dòng)。

圖3 簧載速度x2隨f變化的分岔圖和最大Lyapunov指數(shù)Fig.3 Bifurcation diagram and largest Lyapunov exponent of sprung velocity x2 varying with f
圖5和圖6給出在不同f 值下系統(tǒng)的相平面圖和Poincaré截面圖。當(dāng)f=2 Hz時(shí),系統(tǒng)處于單周期運(yùn)動(dòng)狀態(tài);f=3.8 Hz時(shí),系統(tǒng)處于2周期運(yùn)動(dòng)狀態(tài)f=4.3 Hz時(shí),系統(tǒng)處于混沌運(yùn)動(dòng)狀態(tài);f=4.54 Hz時(shí),系統(tǒng)處于12周期運(yùn)動(dòng)狀態(tài);f=4.8 Hz時(shí),系統(tǒng)處于混沌運(yùn)動(dòng)狀態(tài);f=5.8 Hz時(shí),系統(tǒng)處于4周期運(yùn)動(dòng)狀態(tài);f=6.2 Hz時(shí),系統(tǒng)處于混沌運(yùn)動(dòng)狀態(tài);當(dāng)f=7.2 Hz時(shí),系統(tǒng)處于單周期運(yùn)動(dòng)狀態(tài)。
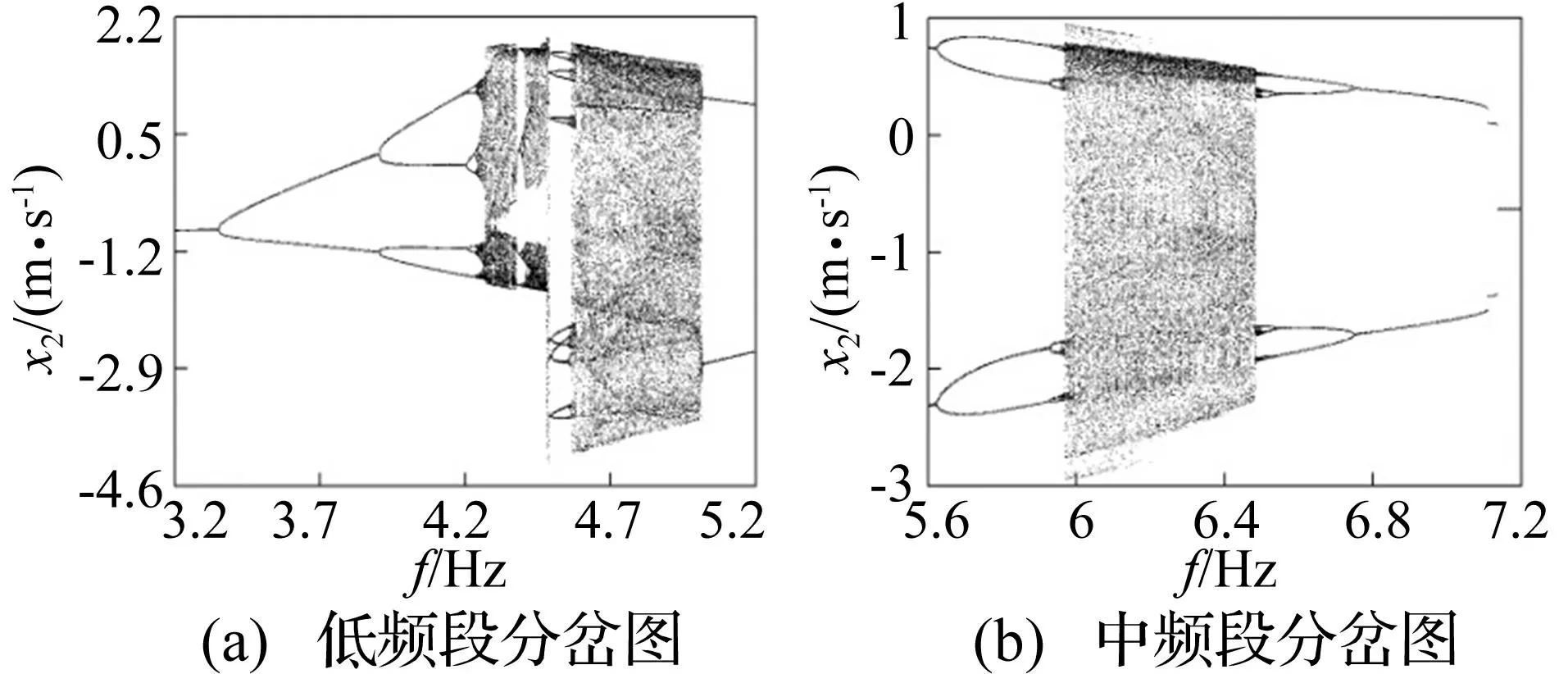
圖4 局部分岔圖Fig.4 Partial bifurcation diagram
綜上所述,當(dāng)路面激勵(lì)幅值較大時(shí),頻率的變化能誘導(dǎo)MR懸架系統(tǒng)產(chǎn)生諸如倍周期分岔、倒倍周期分岔和切分岔等不同的分岔特性,導(dǎo)致系統(tǒng)在全頻段內(nèi)產(chǎn)生豐富的動(dòng)力學(xué)行為,交替出現(xiàn)周期運(yùn)動(dòng)與混沌運(yùn)動(dòng)。而混沌運(yùn)動(dòng)是一種高頻且極不穩(wěn)定的運(yùn)動(dòng)狀態(tài),會(huì)使車(chē)身和車(chē)輪具有頻繁的垂直動(dòng)行程,一方面影響了汽車(chē)的駕乘舒適性,另一方面加劇了汽車(chē)零部件的疲勞損傷,降低其使用壽命,對(duì)行駛安全構(gòu)成威脅[10,16]。
2.2激勵(lì)幅值影響
車(chē)輛懸架系統(tǒng)存在兩個(gè)固有頻率,分別是低頻段的簧載固有頻率f-ms和高頻段的非簧載固有頻率f-mu。本文由于是針對(duì)人體敏感的中低頻段進(jìn)行駕乘舒適性研究,故將路面激勵(lì)頻率也設(shè)定為低頻段,此時(shí)系統(tǒng)容易發(fā)生共振現(xiàn)象,導(dǎo)致系統(tǒng)失穩(wěn),因此,研究幅值變化對(duì)系統(tǒng)的動(dòng)力學(xué)特性影響是十分必要的。
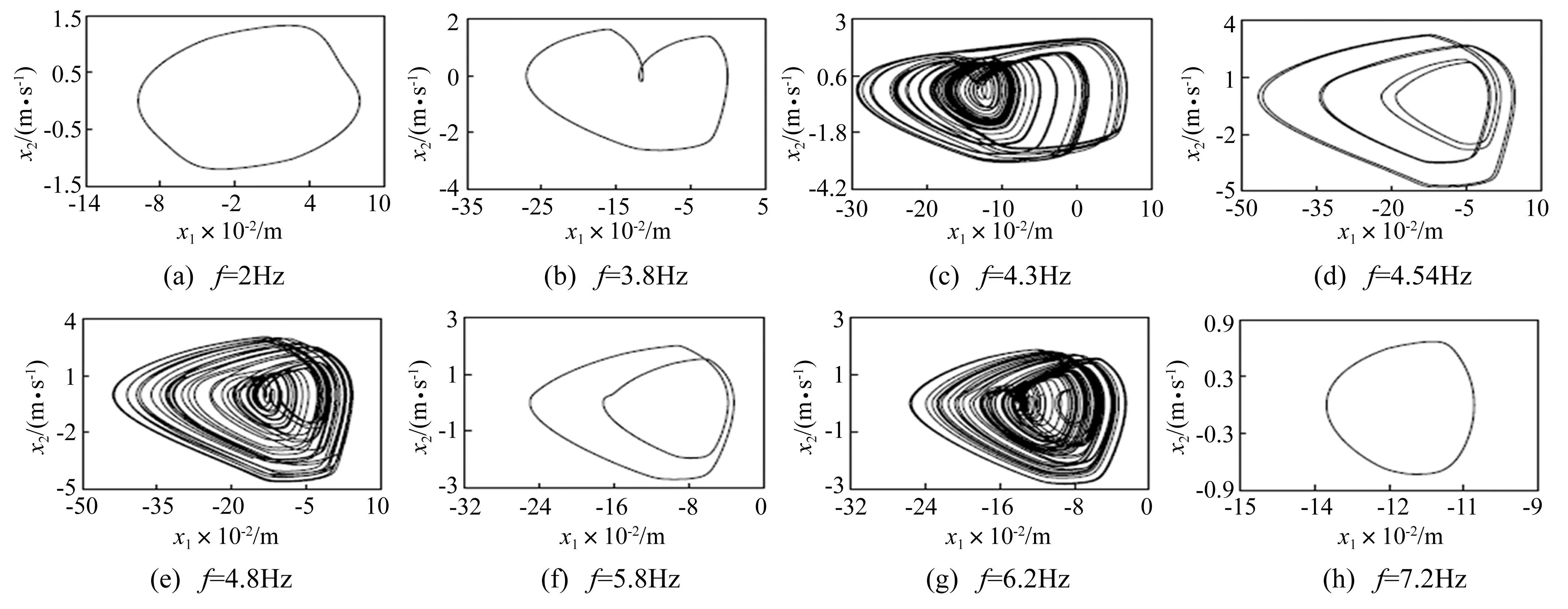
圖5 系統(tǒng)在不同頻率下的相平面圖Fig.5 The phase diagram at different frequency
圖6 系統(tǒng)在不同頻率下的Poincaré截面Fig.6 The Poincaré map at different frequency
圖7為f=3.5 Hz時(shí),MR懸架系統(tǒng)簧載速度x2隨激勵(lì)幅值變化的分岔圖和最大Lyapunov指數(shù),兩者具有很好的一致性。可以看出,在激勵(lì)幅值變化過(guò)程中,系統(tǒng)主要是由倍周期分岔級(jí)聯(lián)至混沌運(yùn)動(dòng)。當(dāng)A<7.47 cm時(shí),系統(tǒng)處于穩(wěn)定周期1對(duì)應(yīng)的Lyapunov指數(shù)小于0,僅在A=5.22 cm時(shí),系統(tǒng)發(fā)生極為短暫的陣發(fā)性混沌運(yùn)動(dòng),對(duì)應(yīng)的Lyapunov指數(shù)跳變?yōu)檎浑S著A的逐漸增大,系統(tǒng)分別在7.47 cm和8.95 cm發(fā)生第一次和第二次倍周期分岔,由穩(wěn)定的周期1依次進(jìn)入周期2、周期4,此時(shí)的Lyapunov指數(shù)仍然小于0;當(dāng)A=9.5 cm時(shí),系統(tǒng)進(jìn)入由周期加倍級(jí)聯(lián)現(xiàn)象導(dǎo)致的混沌運(yùn)動(dòng)狀態(tài)。
為了更加全面直觀地描述系統(tǒng)對(duì)隨激勵(lì)幅值的敏感性,在由上述分析所確定的參數(shù)區(qū)間內(nèi)選取一組特定幅值,結(jié)合圖8~圖11所示的時(shí)序圖、相平面圖、Poincaré截面和功率譜圖,進(jìn)一步探討車(chē)身的垂直運(yùn)動(dòng)特性。可以看出,當(dāng)簧載速度x2表現(xiàn)為與激勵(lì)周期頻率緊密相關(guān)的周期運(yùn)動(dòng)時(shí)(見(jiàn)圖8~圖10),系統(tǒng)相平面圖為有限個(gè)封閉的曲形,對(duì)應(yīng)的龐加萊截面上為有限個(gè)獨(dú)立點(diǎn),功率譜則是由分立的離散譜線組成;當(dāng)系統(tǒng)處于混沌運(yùn)動(dòng)狀態(tài)時(shí)(見(jiàn)圖11),其運(yùn)動(dòng)軌跡不重復(fù)且雜亂無(wú)章,龐加萊截面截面均由充滿整個(gè)狀態(tài)空間且具有分形結(jié)構(gòu)的密集點(diǎn)組成,而功率譜具有類(lèi)似噪聲的背景和寬峰,成廣域連續(xù)分布狀態(tài)。
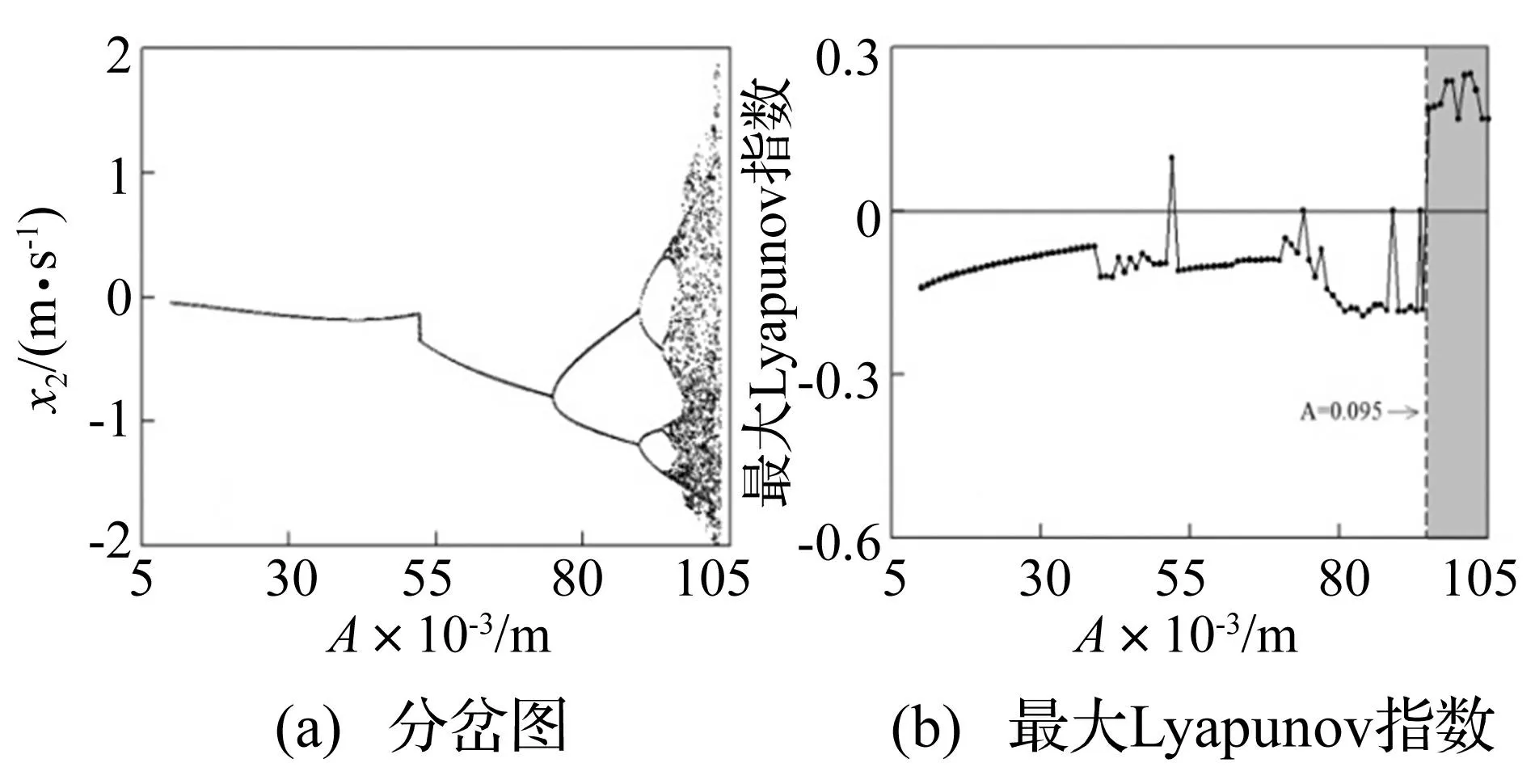
圖7 簧載速度x2隨A變化的分岔圖和最大Lyapunov指數(shù)Fig.7 Bifurcation diagram and largest Lyapunov exponent of sprung velocity x2 varying with A
綜上分析可知,在MR車(chē)輛懸架系統(tǒng)內(nèi)部參數(shù)固定的情況下,通過(guò)改變外部路面激勵(lì)的頻率和幅值均能改變系統(tǒng)的運(yùn)行特性,使系統(tǒng)產(chǎn)生復(fù)雜的動(dòng)力學(xué)行為。因此,在汽車(chē)設(shè)計(jì)過(guò)程中,應(yīng)充分考慮不同路面狀態(tài)的影響,選擇合適的懸架參數(shù),使系統(tǒng)盡量避開(kāi)混沌振動(dòng),以減輕行駛過(guò)程中對(duì)汽車(chē)和公路帶來(lái)的損傷。

圖8 A=6 cm時(shí)的簧載速度時(shí)序圖、相平面圖、Poincaré截面和功率譜Fig.8Time history of sprung velocity, phase diagram, Poincaré map and power spectrum (A=6 cm)

圖9 A=8.7 cm時(shí)的簧載速度時(shí)序圖、相平面圖、Poincaré截面和功率譜Fig.9 Time history of sprung velocity, phase diagram, Poincaré map and power spectrum (A=8.7 cm)

圖10 A=9.22 cm時(shí)的簧載速度時(shí)序圖、相平面圖、Poincaré截面和功率譜Fig.10 Time history of sprung velocity, phase diagram, Poincaré map and power spectrum (A=9.22 cm)

圖11 A=10 cm時(shí)的簧載速度時(shí)序圖、相平面圖、Poincaré截面和功率譜Fig.11 Time history of sprung velocity, phase diagram, Poincaré map and power spectrum (A=10 cm)
3MRD控制電流對(duì)MR懸架系統(tǒng)的穩(wěn)定性影響分析
半主動(dòng)懸架既克服了被動(dòng)懸架阻尼力不能實(shí)時(shí)調(diào)節(jié)的缺陷,又無(wú)需采用主動(dòng)懸架能量消耗較大的執(zhí)行器,僅輸入少量的調(diào)節(jié)能量便可獲得幾乎和主動(dòng)懸架一樣的減振性能,大大降低了實(shí)現(xiàn)成本。本世紀(jì)初以來(lái),應(yīng)用MRD的智能車(chē)輛懸架半主動(dòng)控制研究已成為國(guó)內(nèi)外學(xué)者的熱點(diǎn)課題,其基本原理是將式(10)中車(chē)輛運(yùn)行狀態(tài)x1-x4實(shí)時(shí)傳送給半主動(dòng)控制器,計(jì)算并給出MRD的控制電流i,通過(guò)改變MRD內(nèi)部磁場(chǎng)強(qiáng)度和磁流液的粘滯系數(shù)的方式,對(duì)MRD的輸出阻尼力Fd進(jìn)行實(shí)時(shí)控制調(diào)節(jié),從而改善車(chē)身運(yùn)動(dòng)性能。
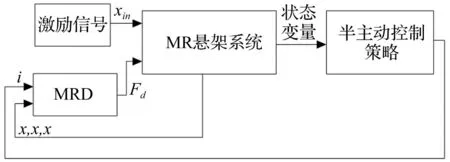
圖12 MR懸架系統(tǒng)半主動(dòng)控制原理圖Fig.12 Schematic diagram of MR-suspension semi-active control
如圖12所示,MR懸架系統(tǒng)的各種半主動(dòng)控制策略最終均是通過(guò)直流控制電流的改變來(lái)實(shí)現(xiàn)的,因此,研究控制電流對(duì)MR懸架系統(tǒng)動(dòng)力學(xué)性能的影響是十分重要的,將為高級(jí)半主動(dòng)控制器的設(shè)計(jì)提供有益的理論指導(dǎo)。為此,本文以電流i為變量,MRD的實(shí)際最大控制直流電流為1 A,取路面激勵(lì)幅值A(chǔ)=8 cm,分別針對(duì)低頻f=3.5 Hz和中頻f=6 Hz的正弦路況進(jìn)行仿真研究,得到系統(tǒng)隨電流變化的分岔曲線如圖13所示。

圖13 簧載速度x2隨電流i變化的分岔圖Fig.13 Bifurcation diagram of sprung velocity x2 varying with current i
當(dāng)i=0,即MRD未施加直流控制電流時(shí),方程(4)中電流控制增益c(i)=1,此時(shí)MR懸架系統(tǒng)等效于阻尼系數(shù)固定的被動(dòng)懸架,在低頻路面激勵(lì)下表現(xiàn)為周期1運(yùn)動(dòng),而在中頻激勵(lì)下呈現(xiàn)混沌狀態(tài)。從圖13(a)中可以看出,當(dāng)控制電流施加作用后,f=3.5 Hz低頻狀態(tài)下的周期1運(yùn)動(dòng)只存在于極小的一段區(qū)域,當(dāng)電流一旦達(dá)到i=0.027 A時(shí)便發(fā)生了倍周期分岔,轉(zhuǎn)變?yōu)橹芷?運(yùn)動(dòng),直到增大到最大控制電流時(shí),仍然處于此種狀態(tài)。結(jié)合圖14的時(shí)序圖可知,低頻時(shí)外加電流僅在MRD由被動(dòng)阻尼器向正常工作狀態(tài)轉(zhuǎn)變的極為短暫的過(guò)程中,改變了系統(tǒng)的動(dòng)力學(xué)特性,一旦MRD正常工作,系統(tǒng)便不再受其影響。
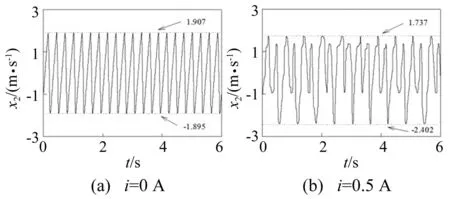
圖14 f=3.5 Hz時(shí)簧載速度x2時(shí)序圖Fig.14 Time histories of sprung velocity x2 (f=3.5 Hz)
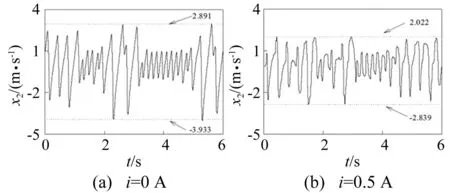
圖15 f=6 Hz時(shí)簧載速度x2時(shí)序圖Fig.15 Time histories of sprung velocity x2 (f=6 Hz)
從圖13(b)中可以看出,當(dāng)控制電流施加作用后,系統(tǒng)在f=6 Hz中頻狀態(tài)下的并未發(fā)生動(dòng)力分岔行為,一直保持混沌狀態(tài)。為了更加清晰的了解系統(tǒng)運(yùn)動(dòng)狀態(tài)的微小變化,圖15給出了兩種典型的控制電流下的時(shí)序圖,值得注意的是,雖然運(yùn)動(dòng)都是雜亂無(wú)章毫無(wú)規(guī)律可言的混沌運(yùn)動(dòng),但是簧載速度x2上下振動(dòng)的幅值卻因?yàn)榭刂齐娏鞯淖饔枚黠@減小,車(chē)輛運(yùn)行狀態(tài)得到了些許的改善。
4結(jié)論
本文建立了2-DoF 1/4車(chē)輛MR懸架系統(tǒng)的動(dòng)力學(xué)模型,系統(tǒng)地研究了MR懸架系統(tǒng)的非線性動(dòng)力學(xué)行為,通過(guò)對(duì)比分岔圖和最大Lyapunov指數(shù),分析了簧載速度對(duì)頻率和幅值變化的敏感性,并結(jié)合相平面圖、Poincaré截面和功率譜圖,進(jìn)一步觀測(cè)MR懸架系統(tǒng)的動(dòng)力學(xué)演化過(guò)程。當(dāng)激勵(lì)幅值較大時(shí),MR懸架系統(tǒng)對(duì)頻率變化較為敏感,在4.23 Hz~6.47 Hz中頻段內(nèi)便會(huì)多次出現(xiàn)混沌振動(dòng);當(dāng)激勵(lì)頻率較小時(shí),MR懸架能夠長(zhǎng)久保持周期運(yùn)動(dòng),僅在A≥9.5 cm即路況極為糟糕的情況下,才會(huì)轉(zhuǎn)化為混沌振動(dòng);將MR懸架系統(tǒng)的半主動(dòng)策略轉(zhuǎn)化為MRD的直流控制電流,通過(guò)分岔圖研究其在低頻和中頻段的動(dòng)力學(xué)行為,發(fā)現(xiàn)系統(tǒng)的運(yùn)動(dòng)特性僅在極小的控制電流下才會(huì)有所改變。上述研究結(jié)果表明:MR懸架系統(tǒng)屬于強(qiáng)非線性系統(tǒng),運(yùn)動(dòng)狀態(tài)容易受到路面激勵(lì)頻率和幅值的影響,而對(duì)MRD控制電流的變化并不敏感。本文研究結(jié)果也對(duì)MR系統(tǒng)半主動(dòng)控制策略的研究有著十分重要的指導(dǎo)意義,可以通過(guò)完善控制器設(shè)計(jì)來(lái)有效抑制MR懸架系統(tǒng)混沌振動(dòng)的發(fā)生。
參 考 文 獻(xiàn)
[1] Turnip A, Park S, Hong K.Sensitivity control of a MR-damper semi-active suspension[J].International Journal of Precision Engineering and Manufacturing,2010,11(2):209-218.
[2] 吳光強(qiáng), 盛云.混沌理論在汽車(chē)非線性系統(tǒng)中的應(yīng)用進(jìn)展[J].機(jī)械工程學(xué)報(bào), 2010, 46(10):81-87.
WU Guang-qiang, SHENG Yun. Review on the application of chaos theory in automobile nonlinear system [J]. Journal of Mechanical Engineering, 2010,46(10):81-87.
[3] Li S H, Yang S P, Guo W W.Investigation on chaotic motion in hysteretic non-linear suspension system with multi-frequency excitations[J].Mechanics Research Communications, 2004,(31):229-236.
[4] 申永軍, 祁玉玲, 楊韶普,等.含時(shí)滯的單自由度半主動(dòng)懸架系統(tǒng)的動(dòng)力學(xué)分析[J].振動(dòng)與沖擊, 2012,31(24):38-40.
SHEN Yong-jun, QI Yu-ling, YANG Shao-pu,et al. Dynamic analysis of a SDOF semi-active suspension system with time-delay [J]. Journal of Vibration and Shock, 2012, 31(24):38-40.
[5] Litak G, Borowiec M, Ali M, et al. Pulsive feedback control of a quarter car model forced by a road profile [J].Chaos, Solitons(and)Fractals, 2007(33):1672-1676.
[6] 高大威, 崔玲, 王昊.追蹤控制雙頻激勵(lì)下汽車(chē)懸架系統(tǒng)的混沌運(yùn)動(dòng)[J].振動(dòng)與沖擊, 2010, 29(5):58-61.
GAO Da-wei, CUI Ling, WANG Hao. Tracking control for chaos motion of an automobile suspension system with dual-frequency excitations [J]. Journal of Vibration and Shock, 2010, 29(5):58-61.
[7] 肖海斌, 方明霞.四自由度汽車(chē)遲滯非線性系統(tǒng)的混沌[J].動(dòng)力學(xué)與控制學(xué)報(bào),2008, 6(4):377-380.
XIAO Hai-bin, FANG Ming-xia. Chaos in Nonlinearity considered 4-degree automobile system [J]. Journal of Dynamics and Control, 2008, 6(4):377-380.
[8] 吳參, 王維銳, 徐博候,等.路面激勵(lì)下車(chē)輛懸架滯回模型的混沌研究[J].浙江大學(xué)學(xué)報(bào)工學(xué)版,2011,45(7):1259-1264.
WU Can, WANG Wei-rui, XU Bo-hou, et al. Chaotic behavior of hysteretic suspension model excited by road surface profile[J]. Journal of Zhejiang University(Engineering Science), 2011, 45(7):1259-1264.
[9] 張海龍, 閔富紅, 王恩榮.磁流變阻尼器的車(chē)輛懸架系統(tǒng)混沌分析與控制[C]//第31屆中國(guó)控制會(huì)議,合肥, 2012:425-428.
[10] 吳瑩, 農(nóng)多敏, 李佳佳,等.磁流變懸架汽車(chē)的非線性振動(dòng)特性分析[J].動(dòng)力學(xué)與控制學(xué)報(bào), 2013, 11(3):235-240.
WU Ying, NONG Duo-min, LI Jia-jia, et al. Nonlinear vibration analysis of automobile with suspension system of magnetorheological damper [J]. Journal of Dynamics and Control, 2013, 11(3):235-240.
[11] 王恩榮, 陳余壽, 馬曉青,等.阻尼器控制與滯環(huán)特性相分離的-模型[J].機(jī)械工程學(xué)報(bào), 2005, 41(7):186-191.
WANG En-rong, CHEN Yu-shou, MA Xiao-qing, et al. MR-DamperF-vmodel decoupling control and hystersis properties [J]. Chinese Journal of Mechanical Engineering, 2005, 41(7):186-191.
[12] 王皖君, 應(yīng)亮, 王恩榮.可控磁流變阻尼器滯環(huán)模型的比較[J].機(jī)械工程學(xué)報(bào), 2009, 45(9):100-108.
WANG Wan-jun, YING Liang, WANG En-rong. Comparison on hysteresis models of controllable magneto-rheological damper [J]. Journal of Mechanical Engineering, 2009, 45(9):100-108.
[13] 謝玲玲, 龔仁喜, 卓浩澤,等.電壓模式控制不連續(xù)傳導(dǎo)模式boost變換器切分岔研究[J].物理學(xué)報(bào), 2012, 6(5):058401-1-058401-7.
XIE Ling-ling, GONG Ren-xi, ZHUO Hao-ze, et al. Investigation of tangent bifurcation in voltage mode controlled DCM boost converters [J]. Acta Phys. Sin, 2012, 6(5):058401-1-058401-7.
[14] 王平, 陳蜀梅, 王知人. 大撓度簡(jiǎn)支矩形薄板受熱力磁耦合作用分岔與混沌[J]. 振動(dòng)與沖擊, 2013, 32(7):129-134.
WANG Ping, CHEN Shu-mei, WANG Zhi-ren. Bifurcation and chaos of a thin rectangular plate simply supported with large deflection in a coupled environment of heating, force and magnetic field [J]. Journal of Vibration and Shock, 2013, 32(7):129-134.
[15] 張惠, 楊智春, 張新平,等. 結(jié)構(gòu)參數(shù)對(duì)機(jī)翼非線性顫振系統(tǒng)混沌運(yùn)動(dòng)特性的影響[J]. 振動(dòng)與沖擊, 2013, 32(12):174-178.
ZHANG Hui, YANG Zhi-chun, ZHANG Xin-ping, et al. Effects of structural parameters on chaotic motion behavior of nonlinear flutter for a two dimensional wing [J]. Journal of Vibration and Shock, 2013, 32(12):174-178.
[16] 方錫邦, 黃新洪. 基于Matlab/simulink的汽車(chē)整車(chē)模型非線性仿真[J]. 汽車(chē)科技, 2008, 6:28-30.
FANG Xi-bang, HUANG Xin-hong. Nonlinear simulink on a full-vehicle model based on Matlab/simulink [J]. Auto Mobile Science & Technology, 2008, 6:28-30.
第一作者 黃苗玉 女,碩士生,1990年2月生
郵箱:erwang@njnu.edu.cn
摘要:針對(duì)雙自由度1/4車(chē)輛模型,采用磁流變阻尼器(MRD)的滯環(huán)阻尼力-速度(F-v)模型,建立磁流變(MR)懸架系統(tǒng)的動(dòng)力學(xué)方程。分別研究了系統(tǒng)在簡(jiǎn)諧路面作用下隨激勵(lì)頻率、激勵(lì)幅值的分岔特性,并利用相平面圖、Poincaré截面和功率譜等詳細(xì)描述了通向混沌振動(dòng)的路徑。同時(shí),結(jié)合MR懸架系統(tǒng)半主動(dòng)控制原理,進(jìn)一步探討了懸架系統(tǒng)在低頻段和中頻段內(nèi)對(duì)控制電流的敏感性。研究結(jié)果表明:MR懸架系統(tǒng)運(yùn)動(dòng)狀態(tài)易受到路面激勵(lì)頻率和幅值的影響,但對(duì)MRD控制電流的變化并不敏感,可以通過(guò)完善控制器設(shè)計(jì)來(lái)有效抑制MR懸架系統(tǒng)混沌振動(dòng)的發(fā)生。
關(guān)鍵詞:磁流變阻尼器;車(chē)輛懸架;混沌振動(dòng);半主動(dòng)控制
Chaotic vibration analysis of vehicle suspension system with magneto-rheological damper
HUANGMiao-yu,WANGEn-rong,MINFu-hong(School of Electrical and Automation Engineering, Nangjing Normal University, Nangjing 210042, China)
Abstract:The dynamic equation of a 2-DOF quarter-car magneto-rheological suspension system was established based on a hysteretic force-velocity (F-v) model of magneto-rheological damper. The bifurcation characteristics affected by the frequency and amplitude of harmonic excitation were deeply studied by using the methods of phase diagram, Poincaré map and power spectrum. According to the principle of semi-active control, the sensitivity to control current for the suspension system was further investigated in the low frequency band and middle frequency band. The results show that the dynamic behaviors of MR suspension system are easily affected by the road excitation frequency and amplitude, and less sensitive to the control current of MRD. The conclusions provide a useful theoretical guidance for consummating the synthesis of MR semi-active suspension system and effectively suppressing its chaotic vibration.
Key words:magneto-rheological damper (MRD); vehicle suspension; chaotic vibration; semi-active control
中圖分類(lèi)號(hào):U461;O322
文獻(xiàn)標(biāo)志碼:A DOI:10.13465/j.cnki.jvs.2015.24.022
通信作者王恩榮 男,教授,博士生導(dǎo)師,1962年生
收稿日期:2014-09-26修改稿收到日期:2014-12-03
- 振動(dòng)與沖擊的其它文章
- 一種改進(jìn)的特征系統(tǒng)實(shí)現(xiàn)算法及其在海洋平臺(tái)上的應(yīng)用
- 列車(chē)運(yùn)行引起的CFG樁復(fù)合路基動(dòng)力響應(yīng)分析
- 基于絕對(duì)節(jié)點(diǎn)坐標(biāo)法的柔性多體系統(tǒng)靈敏度分析
- 葉片旋轉(zhuǎn)噪聲激勵(lì)下旋渦風(fēng)機(jī)殼體聲輻射計(jì)算理論及分析
- 地鐵車(chē)輛交會(huì)對(duì)單洞雙線隧道影響的數(shù)值模擬
- 基于量子計(jì)算的限制波爾茲曼機(jī)網(wǎng)絡(luò)模型及分類(lèi)算法