月球鉆取采樣機(jī)構(gòu)的鉆桿結(jié)構(gòu)與運(yùn)動(dòng)參數(shù)分析
2016-02-24 07:01:14王麗麗劉志全吳偉仁張之敬
航空學(xué)報(bào) 2016年2期
關(guān)鍵詞:優(yōu)化結(jié)構(gòu)
王麗麗, 劉志全, *, 吳偉仁, 張之敬
1. 北京理工大學(xué) 機(jī)械與車輛學(xué)院, 北京 100081 2. 中國(guó)空間技術(shù)研究院, 北京 100094 3. 探月與航天工程中心, 北京 100037
月球鉆取采樣機(jī)構(gòu)的鉆桿結(jié)構(gòu)與運(yùn)動(dòng)參數(shù)分析
王麗麗1, 2, 劉志全1, 2, *, 吳偉仁1, 3, 張之敬1
1. 北京理工大學(xué) 機(jī)械與車輛學(xué)院, 北京 100081 2. 中國(guó)空間技術(shù)研究院, 北京 100094 3. 探月與航天工程中心, 北京 100037
針對(duì)月球鉆取式自動(dòng)采樣機(jī)構(gòu)空心外螺旋鉆桿取樣過(guò)程,分別建立了月壤內(nèi)聚力和月壤內(nèi)摩擦系數(shù)隨月壤深度變化的數(shù)學(xué)模型,建立了鉆進(jìn)過(guò)程中鉆桿運(yùn)動(dòng)參數(shù)(鉆進(jìn)速度和鉆桿轉(zhuǎn)速)與鉆桿結(jié)構(gòu)參數(shù)(鉆桿螺旋升角、外徑、槽寬比和螺旋槽深等)之間的關(guān)系。建模過(guò)程考慮了月壤物理和機(jī)械特性隨鉆進(jìn)深度變化特性、鉆桿鉆進(jìn)牽連速度及月壤微元相互間的抗剪性,使得鉆桿參數(shù)符合月球鉆取采樣的實(shí)際工況。對(duì)模型進(jìn)行了驗(yàn)證,利用該模型開(kāi)展了鉆桿結(jié)構(gòu)參數(shù)對(duì)運(yùn)動(dòng)參數(shù)的影響分析,給出了鉆桿結(jié)構(gòu)參數(shù)對(duì)鉆桿運(yùn)動(dòng)參數(shù)的影響規(guī)律,獲得了鉆桿結(jié)構(gòu)參數(shù)的最佳取值范圍。以鉆桿轉(zhuǎn)速與鉆進(jìn)速度比最小為優(yōu)化目標(biāo),以結(jié)構(gòu)參數(shù)為設(shè)計(jì)變量,基于遺傳算法對(duì)鉆桿結(jié)構(gòu)參數(shù)進(jìn)行了優(yōu)化,優(yōu)化后的鉆桿轉(zhuǎn)速與轉(zhuǎn)進(jìn)速度比降低了13.8%。該優(yōu)化結(jié)果降低了系統(tǒng)能耗,提高了鉆取采樣輸月壤效率,可為鉆取式自動(dòng)采樣機(jī)構(gòu)的設(shè)計(jì)提供理論依據(jù)。
鉆取采樣機(jī)構(gòu); 空心外螺旋鉆桿; 結(jié)構(gòu)參數(shù); 運(yùn)動(dòng)參數(shù); 月壤; 采樣
在月球、火星乃至未來(lái)其他星球的深空探測(cè)任務(wù)中,星球表面或表下土壤及巖石樣品的采集對(duì)于研究星球環(huán)境、地質(zhì)構(gòu)造、資源以及物質(zhì)組成等具有重要意義[1]。鉆取式自動(dòng)采樣機(jī)構(gòu)相比其他采樣機(jī)構(gòu),因能夠保持所采樣品的層理特性而備受關(guān)注。空心外螺旋鉆桿作為常用的一種鉆桿[2],是鉆取式自動(dòng)采樣機(jī)構(gòu)實(shí)現(xiàn)快速優(yōu)質(zhì)鉆進(jìn)的重要部件,用以傳遞鉆機(jī)動(dòng)力、承受軸向力和回轉(zhuǎn)扭矩。鉆桿的運(yùn)動(dòng)參數(shù)(轉(zhuǎn)速和鉆進(jìn)速度)影響著整個(gè)采樣機(jī)構(gòu)的取樣效率,若運(yùn)動(dòng)參數(shù)選擇不合理,會(huì)帶來(lái)堵鉆和燒鉆等風(fēng)險(xiǎn),因此對(duì)鉆桿結(jié)構(gòu)與運(yùn)動(dòng)參數(shù)的分析是設(shè)計(jì)鉆取式采樣機(jī)構(gòu)的關(guān)鍵之一。
國(guó)外對(duì)星球采樣的螺旋鉆桿結(jié)構(gòu)詳細(xì)設(shè)計(jì)與分析至今未見(jiàn)公開(kāi)報(bào)道。國(guó)內(nèi)文獻(xiàn)[2]建立了月壤與鉆桿作用力的數(shù)學(xué)模型,但未考慮月壤微元塊相互間的抗剪性、鉆桿提供給月壤的鉆進(jìn)牽連速度及月壤隨鉆進(jìn)深度動(dòng)態(tài)特性變化。文獻(xiàn)[3]雖考慮了鉆桿提供給月壤的鉆進(jìn)牽連速度,但忽略了月壤微元塊間的抗剪性,也未對(duì)模型進(jìn)行驗(yàn)證及參數(shù)優(yōu)化。文獻(xiàn)[4]以鉆桿輸出月壤所消耗的功率最小為目標(biāo),對(duì)鉆桿結(jié)構(gòu)參數(shù)進(jìn)行了優(yōu)化設(shè)計(jì),但所建立的阻力矩模型僅適用于鉆桿螺旋升角小于5°的情況,而不適用于鉆桿螺旋升角較大(10°~20°)的情況,也未對(duì)鉆桿運(yùn)動(dòng)參數(shù)進(jìn)行分析,而是直接采用定值。文獻(xiàn)[5]涉及的空心外螺旋鉆桿結(jié)構(gòu)雖然與月面鉆取式自動(dòng)采樣機(jī)構(gòu)的鉆桿結(jié)構(gòu)相似,但文獻(xiàn)[5]是基于地球土壤特性進(jìn)行分析的,而月壤與地球土壤的力學(xué)特性不同,若按地球土壤特性設(shè)計(jì)鉆桿,難以適應(yīng)月球采樣。文獻(xiàn)[6-7]雖然涉及了月壤鉆取采樣,但研究對(duì)象并非鉆桿而是鉆頭。
基于上述背景,本文在綜合考慮月壤物理和機(jī)械特性隨鉆進(jìn)深度變化特性、鉆桿鉆進(jìn)牽連速度及月壤微元塊相互間抗剪性的基礎(chǔ)上,分別建立月壤內(nèi)聚力和月壤內(nèi)摩擦系數(shù)隨月壤深度變化的數(shù)學(xué)模型,建立鉆進(jìn)過(guò)程中鉆桿運(yùn)動(dòng)參數(shù)(鉆進(jìn)速度和鉆桿轉(zhuǎn)速)與鉆桿結(jié)構(gòu)參數(shù)(鉆桿螺旋升角、外徑、槽寬比和螺旋槽深等)之間的關(guān)系,驗(yàn)證模型的有效性。借助這些模型,開(kāi)展鉆桿結(jié)構(gòu)參數(shù)對(duì)鉆桿運(yùn)動(dòng)參數(shù)的影響分析,獲取鉆桿結(jié)構(gòu)參數(shù)的最佳取值范圍,以鉆桿轉(zhuǎn)速與鉆進(jìn)速度比最小為目標(biāo),基于遺傳算法對(duì)鉆桿結(jié)構(gòu)參數(shù)進(jìn)行優(yōu)化,為鉆取式自動(dòng)采樣機(jī)構(gòu)的設(shè)計(jì)提供理論依據(jù)。
1 鉆取式采樣機(jī)構(gòu)的工作原理及月壤特性
圖1展示了蘇聯(lián)Luna-24月球探測(cè)器鉆取式自動(dòng)采樣機(jī)構(gòu)的工作原理[8-9]。采樣時(shí),鉆機(jī)和傳送機(jī)構(gòu)同時(shí)工作,鉆桿在周向回轉(zhuǎn)驅(qū)動(dòng)力矩和軸向加載力的共同作用下鉆入月壤。鉆桿橫截面為雙層同心圓結(jié)構(gòu),其內(nèi)層鉆桿的內(nèi)壁上裝有專門(mén)的柔性取樣袋。隨著鉆探深度增大,月壤逐漸進(jìn)入內(nèi)層鉆桿的空腔內(nèi),柱形月壤被柔性取樣袋收集其中。柔性取樣袋頂端封閉并與鋼絲繩連接,鋼絲繩沿著支撐桁架向上纏繞在回收機(jī)構(gòu)的卷筒上。當(dāng)鉆桿鉆入指定深度后,柔性取樣袋下端封住所取樣品。安裝于支撐桁架頂端的回收機(jī)構(gòu)通過(guò)電機(jī)驅(qū)動(dòng)回收卷筒和纏繞鋼絲繩將內(nèi)層鉆桿中的柔性取樣袋提出并纏繞至回收卷筒上。回收機(jī)構(gòu)中裝有釋放分離裝置,將纏繞了柔性取樣袋的卷筒彈入返回器內(nèi)。最后,火工裝置起爆斷開(kāi)支撐桁架與傳送機(jī)構(gòu)之間的連接[10]。

圖1 Luna-24月球探測(cè)器上的鉆取式自動(dòng)采樣機(jī)構(gòu)[8-9]
Fig.1 Automatic drilling sampling mechanism on Luna-24 explorer[8-9]
月壤是由固體顆粒組成的,顆粒間的連結(jié)強(qiáng)度遠(yuǎn)遠(yuǎn)小于顆粒本身的強(qiáng)度,故在外力作用下顆粒之間發(fā)生相互錯(cuò)動(dòng)[11-13]。月表分布面積最廣的地貌為相對(duì)平緩的均一地貌,該地區(qū)月壤的孔隙比約為0.8~1.0,更松散的月壤大多出現(xiàn)在具有較大坡度的地貌區(qū)。由月表月壤的孔隙比與承載力的對(duì)應(yīng)關(guān)系[9]可知,相對(duì)平緩和撞擊坑交疊區(qū),月表月壤的承載力為25~55 kPa的概率最大。月表月壤較為松散,承載力不高[14],鉆取式自動(dòng)采樣機(jī)構(gòu)不需要較大鉆壓力即可鉆入;而隨著月壤深度的增加,月壤的容重、內(nèi)摩擦角增大,孔隙比減小,月壤的壓實(shí)程度增加。月壤顆粒形態(tài)多樣,長(zhǎng)條狀、次棱角狀和棱角狀的顆粒形態(tài)較為常見(jiàn),棱角狀(特別是鋸齒狀)粒形使得月壤顆粒之間互鎖,相互滑行困難,這導(dǎo)致次月表月壤在抵抗外物鍥入方面幾乎類似于固體巖石,巖芯取樣器需要更大的壓力才能順利取樣。因此研究月壤微元塊運(yùn)動(dòng)分析時(shí),可把鉆桿螺旋面之間的月壤看成由n個(gè)正方體微元塊顆粒組成。研究其相互錯(cuò)位時(shí),需考慮月壤微元塊所受的剪切力,還需考慮月壤密度、摩擦系數(shù)及內(nèi)聚力隨著鉆進(jìn)深度的變化關(guān)系。
2 空心螺旋鉆桿與月壤相互作用力學(xué)模型
2.1 基本假設(shè)
根據(jù)鉆取式采樣機(jī)構(gòu)在月面鉆取月壤的特點(diǎn),為簡(jiǎn)化計(jì)算作如下假設(shè):①鉆桿的幾何尺寸、鉆桿材料的機(jī)械性能在鉆進(jìn)過(guò)程中保持不變,不考慮溫升對(duì)鉆桿運(yùn)行狀態(tài)的影響;②鉆桿橫截面剛性且與中心線正交,材料各向同性;③螺旋槽內(nèi)月壤被考慮為連續(xù)粘結(jié)體,前后方月壤對(duì)微元塊壓力等大且n個(gè)月壤微元塊相對(duì)螺旋面具有相同的螺旋向上運(yùn)動(dòng)和角速度。
2.2 月壤微元塊運(yùn)動(dòng)參數(shù)的解析模型
鉆桿在鉆進(jìn)月壤過(guò)程中,螺旋鉆桿以角速度ω回轉(zhuǎn)時(shí),月壤微元塊相對(duì)于螺旋葉片滑動(dòng)。設(shè)鉆桿一個(gè)螺距內(nèi)有n個(gè)剛體正方體微元塊自然堆積。月壤微元塊的受力如圖2所示,空心外螺旋鉆桿結(jié)構(gòu)如圖3所示。
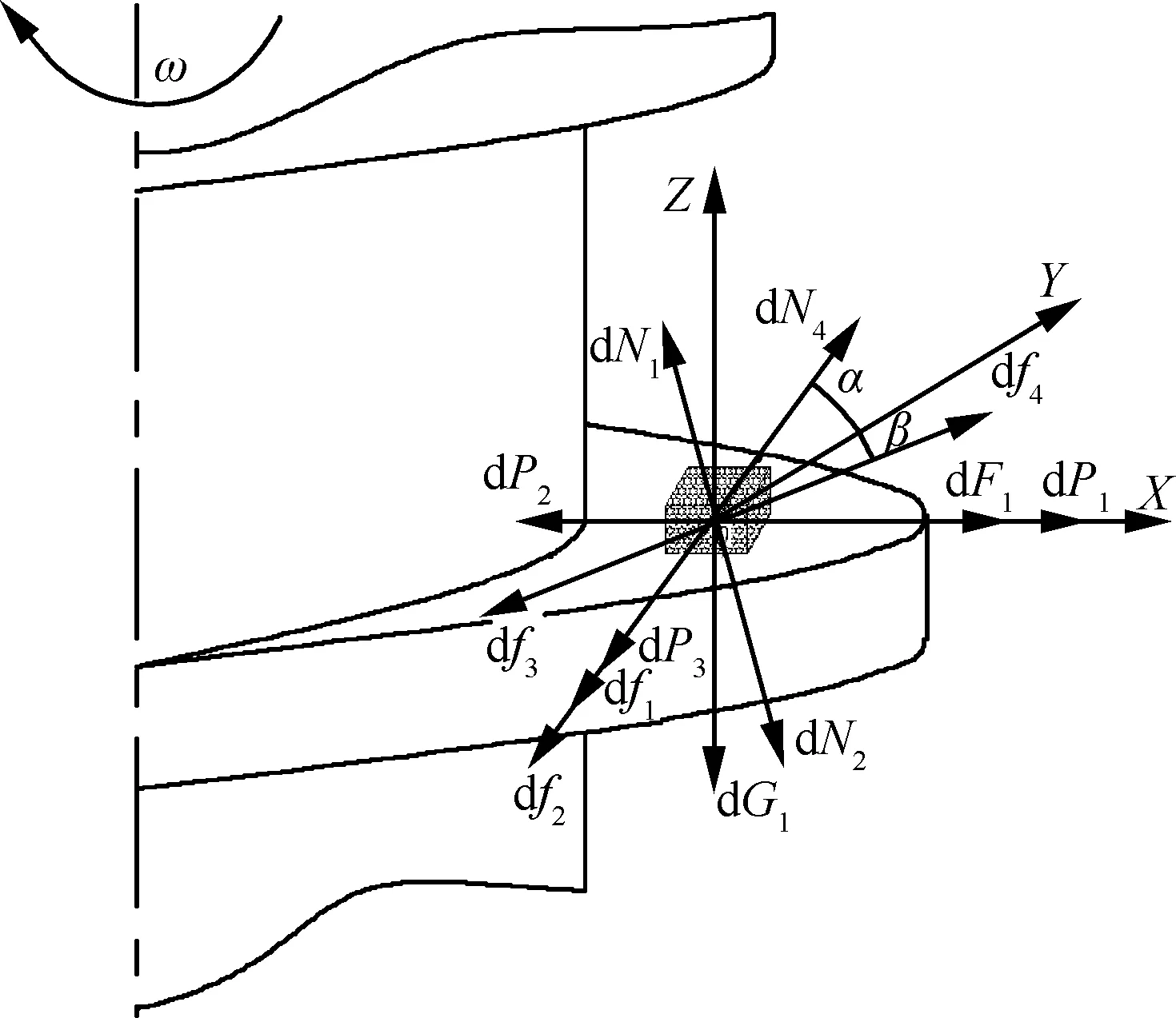
圖2 月壤微元塊受力圖
Fig. 2 Force diagram of lunar-soil infinitesimal
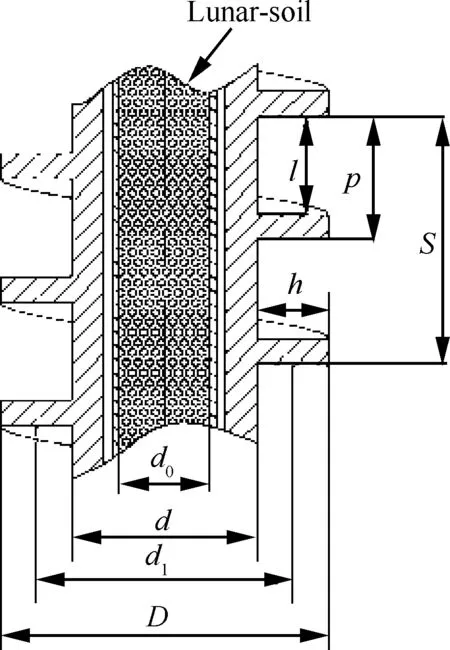
圖3 空心外螺旋鉆桿結(jié)構(gòu)
Fig. 3 Structure of hollow-external-screw drill stem
在圖2中,XYZ為三維直角坐標(biāo)系,X為徑向,Y為切向(周向),Z為軸向;α為鉆桿的螺旋升角;β為月壤微元塊的螺旋升角;dF1為微元塊在螺旋槽中運(yùn)動(dòng)的離心力;dG1為微元塊的重力;dN1、df1分別為螺旋葉片對(duì)月壤微元塊的支持力和摩擦力;dN2、df2分別為上方月壤對(duì)微元塊的壓力和剪切力;dP1、df3分別為左方月壤對(duì)微元塊的壓力和剪切力;dP2、df4分別為右方月壤對(duì)微元塊的壓力和剪切力;dP3、dP4分別為前方和后方月壤對(duì)微元塊的壓力,dP3和dP4等大反向。

(1)
當(dāng)β=0°時(shí),微元塊處于極限平衡狀態(tài),即微元塊保持在同一水平高度做圓周運(yùn)動(dòng),既不上升也不下滑,此時(shí)dP2≤dF1,dP1和df2不存在,存在臨界深度z0,使得dP2=dF1,通過(guò)平衡方程式(1),可獲得鉆桿排出月壤的臨界角速度ω0。
當(dāng)β>0°時(shí),進(jìn)一步增大鉆桿的回轉(zhuǎn)角速度,dF1逐漸增大,則左、右方微元塊的df3和df4分別增大,此時(shí)dP2>dF1,dP1和df2存在,由于微元塊受到了相對(duì)水平面向上運(yùn)動(dòng)的力,因此微元塊可從鉆孔底部排出。此時(shí)微元塊的運(yùn)動(dòng)過(guò)程,可認(rèn)為是微元塊相對(duì)水平面向上的運(yùn)動(dòng)和隨螺旋鉆桿回轉(zhuǎn)運(yùn)動(dòng)的復(fù)合,最終微元塊以β向上螺旋勻速轉(zhuǎn)動(dòng)。df1、df2、df3和df4的表達(dá)式為
(2)

(3)
緊貼圖2所示微元塊上方的微元塊(第2個(gè)月壤微元塊)的受力如圖4所示。
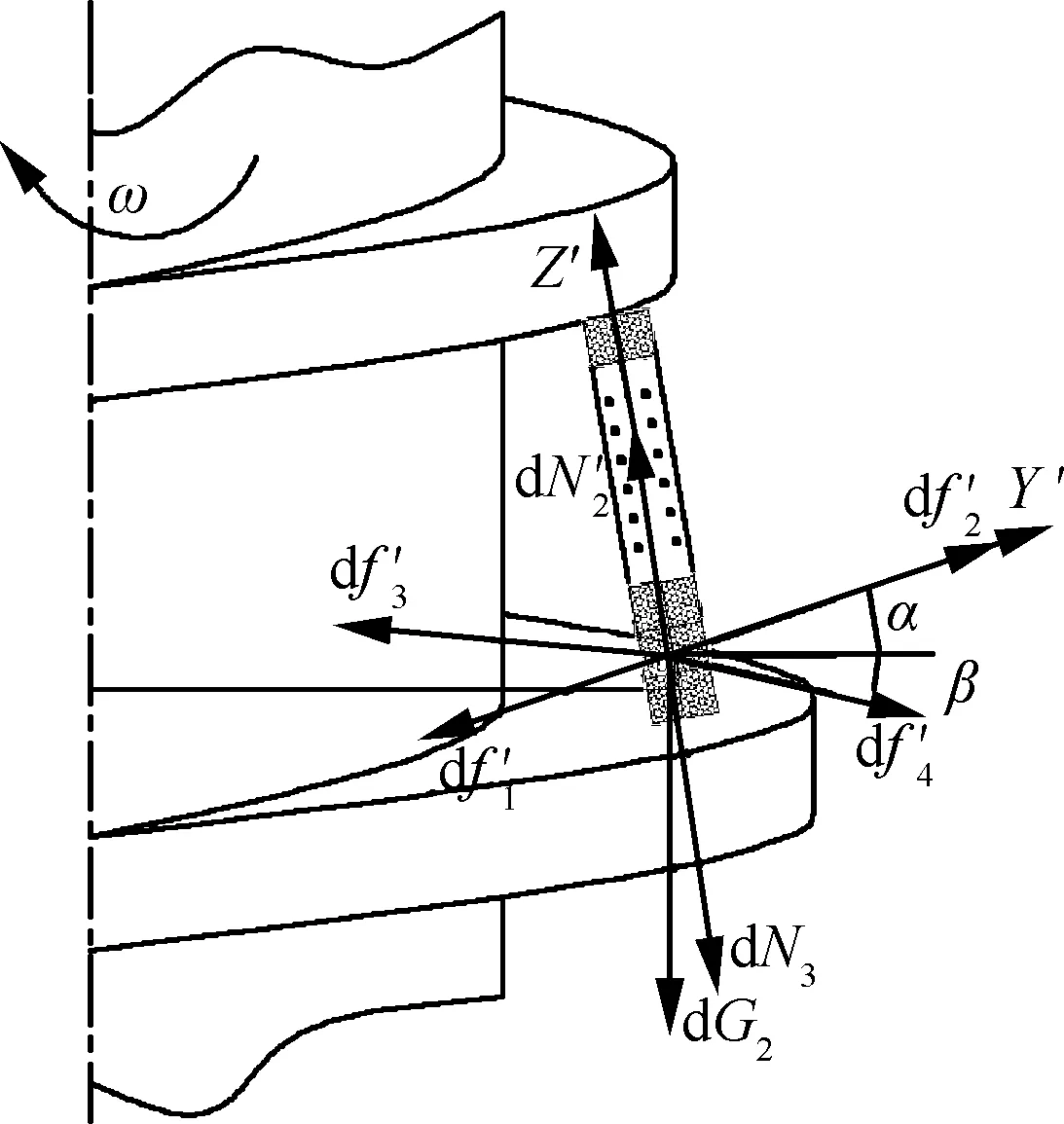
圖4 正壓力方向上的一個(gè)小微元塊受力圖
Fig. 4 Force diagram of a lunar-soil infinitesimal in positive pressure direction

(4)
據(jù)式(3)和式(4),同理可得在Z′方向上的n-1 個(gè)微元塊力平衡方程,則有
(5)

根據(jù)式(5),得

由式(1)及N1、N2可求得
(7)
把β=0°代入式(7)中,便可得微元塊的臨界角速度ω0,根據(jù)dP2=dF1,則有
(8)

2.3 鉆桿運(yùn)動(dòng)參數(shù)與月壤微元絕對(duì)角速度的關(guān)系
當(dāng)鉆取機(jī)構(gòu)實(shí)際轉(zhuǎn)速為nz時(shí),螺旋槽內(nèi)月壤在隨鉆取機(jī)構(gòu)旋轉(zhuǎn)的同時(shí),還相對(duì)螺旋面向上滑動(dòng),實(shí)現(xiàn)鉆屑的有效排出。槽內(nèi)微元塊的絕對(duì)運(yùn)動(dòng)也為螺旋運(yùn)動(dòng),其旋向與鉆桿螺旋面的旋向相反,與水平方向的夾角為β,微元塊在螺旋葉片上的絕對(duì)速度va由鉆桿回轉(zhuǎn)牽連速度vp、鉆桿鉆進(jìn)牽連速度vj和槽內(nèi)月壤微元相對(duì)螺旋面的滑行速度vr合成,即va=vp+vj+vr,如圖5所示,可分解為垂直向上的速度vt和水平周向速度vh,則有鉆頭單位時(shí)間內(nèi)切削月壤的體積SD等于單位時(shí)間內(nèi)通過(guò)空心螺旋內(nèi)鉆桿體積Sd與單位時(shí)間內(nèi)通過(guò)螺旋槽垂直截面月壤的體積Sk的和,即
(9)

圖5 月壤微元運(yùn)動(dòng)分析
Fig. 5 Kinematic analysis of lunar-soil infinitesimal
SDvj=Sk(vt+vj)+Sdvj
(10)
式中:SD=π(0.5D)2;Sd=π(0.5d0)2;Sk=ψπφ-1((0.5D)2-(0.5d)2)=0.25ψφ-1π(D2-d2),其中φ為螺旋槽內(nèi)月壤的松散體積系數(shù),取φ=1.6[3]。
由式(10)可得螺旋鉆桿鉆進(jìn)速度v(即vj)
(11)
式(11)為鉆進(jìn)過(guò)程中v與ωs的關(guān)系式。
把式(9)和式(10)代入式(11),整理可得螺旋鉆桿轉(zhuǎn)速為
(12)
式(12)即鉆進(jìn)過(guò)程中nz與ωs的關(guān)系式,可見(jiàn)v和nz都與鉆桿結(jié)構(gòu)參數(shù)、鉆桿月壤間摩擦系數(shù)、月壤螺旋升角、月壤特性相關(guān)。
3 月壤內(nèi)聚力、月壤內(nèi)摩擦系數(shù)隨月壤深度的變化
美國(guó)的Mitchell院士利用地面玄武巖配制了不同孔隙比e的模擬月壤[15],通過(guò)數(shù)據(jù)擬合給出了式(13)所示的線性關(guān)系:
tanφ=1.377 9e-1-0.392 5
(13)

(14)
(15)
月壤與鈦合金鉆桿的摩擦系數(shù)暫無(wú)文獻(xiàn)報(bào)道,根據(jù)月壤物理特性并考慮到月壤屬于不飽和粘土,該摩擦系數(shù)近似按模擬月壤與鈦合金的摩擦系數(shù)試驗(yàn)值選取μ1=0.35[3]。
4 試驗(yàn)驗(yàn)證
為了驗(yàn)證式(11)和式(12)的正確性,用某鉆取式自動(dòng)采樣機(jī)構(gòu)的試驗(yàn)數(shù)據(jù)與理論數(shù)據(jù)進(jìn)行比對(duì),將試驗(yàn)參數(shù)及μ1=0.35代入理論模型式(12)中,得到D與nz的關(guān)系曲線如圖6所示。
由圖6可見(jiàn),理論曲線與試驗(yàn)曲線變化趨勢(shì)基本吻合,二者最大相對(duì)誤差(理論值與試驗(yàn)值差的絕對(duì)值除以理論值)為8.62%,驗(yàn)證了所建模型的正確性。理論與試驗(yàn)數(shù)據(jù)之間的誤差主要來(lái)源于二者之間所用模擬月壤特性的差異。
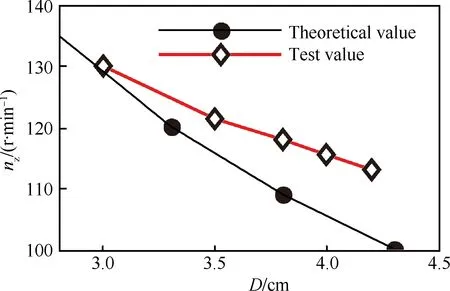
圖6 試驗(yàn)數(shù)據(jù)與理論數(shù)據(jù)對(duì)比
Fig. 6 Comparison between test value and theoretical value
5 鉆桿結(jié)構(gòu)參數(shù)對(duì)運(yùn)動(dòng)參數(shù)的影響分析
在u0=10/13,D=3.5 cm,h=0.4 cm的情況下結(jié)構(gòu)參數(shù)α和β對(duì)運(yùn)動(dòng)參數(shù)的影響如圖7所示。
由圖7(a)可見(jiàn),在β=0°~10°,α=0°~20°時(shí),v隨α變化近似成線性關(guān)系,但斜率很小,v的變化很小,當(dāng)α=20°~30°時(shí),v和α成非線性關(guān)系,隨著α增大而急劇增大,β的影響較為明顯。由圖7(b)可見(jiàn),nz-α曲線存在極小值,nz的極小值分別發(fā)生在α=9°,β=5°;α=11.5°,β=8°;α=12.5°,β=10°時(shí);在相同α值下,β越大,nz越大,由此可推斷出為了減小鉆桿能耗,盡可能使nz取極小值,β盡可能小。由圖7(c)和圖7(d)可見(jiàn),在α一定的情況下,v和nz隨β的增大而增大,由圖7(d)可見(jiàn),當(dāng)β增大到一特定值時(shí),v和nz變?yōu)?,即發(fā)生停鉆(Luna-20曾發(fā)生過(guò)停鉆現(xiàn)象),α越大,發(fā)生停鉆的β值越小,α越小,發(fā)生停鉆前β值的可取范圍更大,則較小的α和較小的β組合,可使得nz較小,達(dá)到降低功耗效果。可見(jiàn)α對(duì)鉆桿運(yùn)動(dòng)特性影響較大,須對(duì)α取值加以控制,只有當(dāng)α小于arctanμ1時(shí),微元塊間的相互作用力與月壤屑運(yùn)動(dòng)方向相同,才成為驅(qū)動(dòng)力,使月壤屑勻速運(yùn)動(dòng),因此α≤arctanμ1=19.29°,綜合以上分析,α在9°~19°區(qū)間選擇最有利。
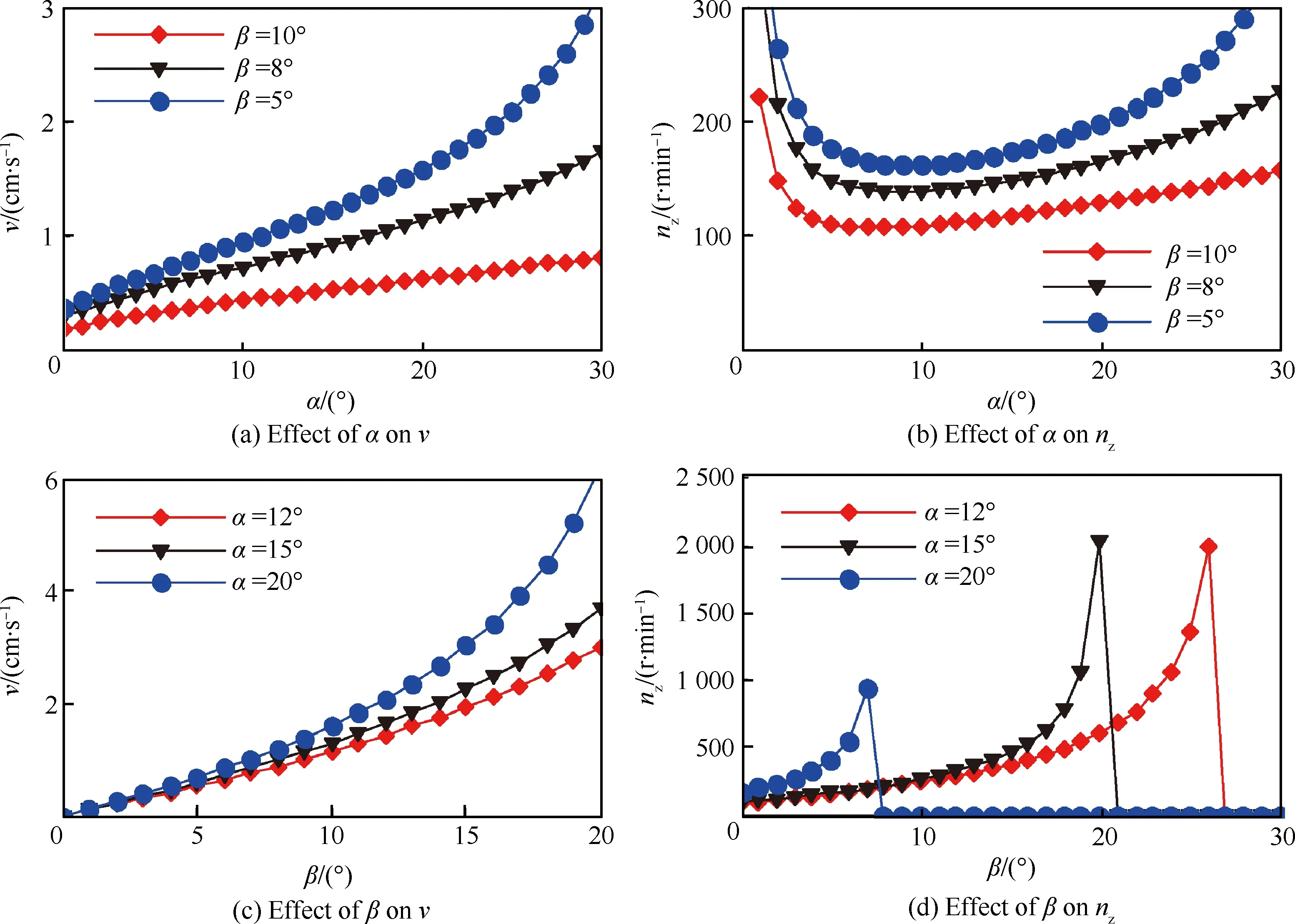
圖7 螺旋升角對(duì)鉆桿運(yùn)動(dòng)參數(shù)的影響
Fig. 7 Effect of spiral angle on drill stem kinematic parameters
在α=15°,D=3.5 cm,h=0.4 cm的情況下結(jié)構(gòu)參數(shù)u0對(duì)運(yùn)動(dòng)參數(shù)的影響如圖8所示。
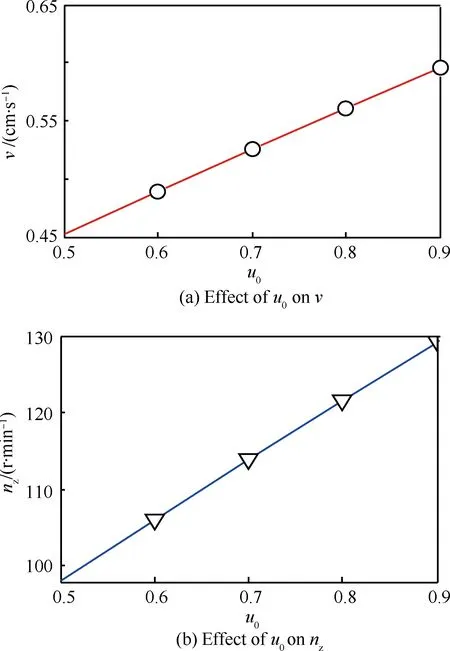
圖8 槽寬比對(duì)鉆桿運(yùn)動(dòng)參數(shù)的影響
Fig. 8 Effect of groove width ratio on drill stem kinematic parameters
由圖8可見(jiàn),v和nz均與u0成正比,隨u0的增大而線性增大,而u0的增大意味著螺旋槽內(nèi)月壤容量增加,在鉆桿扭轉(zhuǎn)功率和鉆進(jìn)功率一定的情況下,u0的增大有利于減小鉆進(jìn)壓力和鉆桿扭矩,有利于增大輸月壤量及其效率,反之u0過(guò)小,容易造成月壤排屑不暢和鉆桿堵鉆。因此在滿足鉆桿結(jié)構(gòu)強(qiáng)度裕度的前提下,盡可能取較大的u0值(在u0的取值范圍(u0<1)內(nèi)),可提高月壤排屑的流暢性,建議u0的取值范圍為0.7~0.9。
在α=15°,u0=10/13,h=0.4 cm的情況下結(jié)構(gòu)參數(shù)D對(duì)運(yùn)動(dòng)參數(shù)的影響如圖9所示。
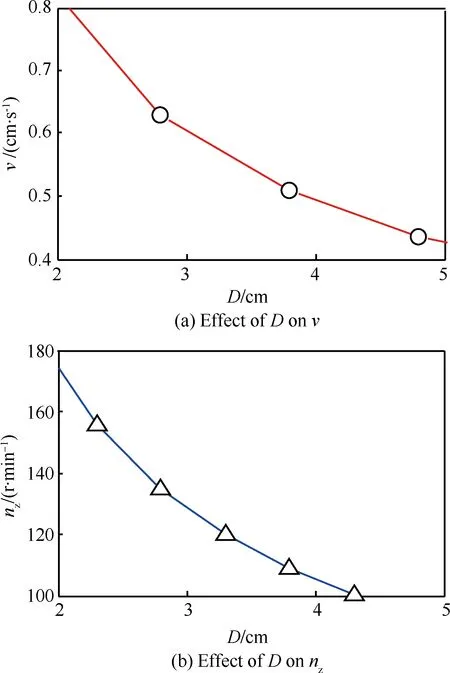
圖9 外徑對(duì)鉆桿運(yùn)動(dòng)參數(shù)的影響
Fig. 9 Effect of outer diameter on drill stem kinematic parameters
由圖9可見(jiàn),v和nz分別與D成負(fù)相關(guān),且在D=3.4cm之后變化趨于平緩,由圖9(a)所示,D越小v越高,鉆取采樣輸月壤效率越高。由圖9(b)可知適當(dāng)增加D可降低排屑時(shí)對(duì)nz的要求,從而減少系統(tǒng)能耗,但當(dāng)D繼續(xù)增大時(shí)鉆桿與月壤摩擦面積增大,則鉆桿的輸月壤功率呈增大趨勢(shì),因此D的增大不利于軸向鉆進(jìn)和提高v,且運(yùn)輸功耗相對(duì)提高,因此D的取值范圍為3.4~4.0cm。
在α=15°,u0=10/13,D=3.5 cm的情況下結(jié)構(gòu)參數(shù)h對(duì)運(yùn)動(dòng)參數(shù)的影響如圖10所示。

圖10 螺旋槽深對(duì)鉆桿運(yùn)動(dòng)參數(shù)的影響
Fig. 10 Effect of Spiral groove depth on drill stem kinematic parameters
由圖10可見(jiàn),v和nz分別與h成正相關(guān),且h對(duì)v的影響幅度較大,由圖10(a)可知,v在h=0.4 cm之后變化趨于平緩,h越大d越小,d的首要任務(wù)是完成鉆壓力及旋轉(zhuǎn)扭矩的傳遞,在剛度和強(qiáng)度要求得到滿足時(shí),適當(dāng)增加h可提高排屑的通暢性;由圖10(b)可知h的減小可降低排屑時(shí)對(duì)nz的要求,從而減少系統(tǒng)能耗。基于鉆孔空間、系統(tǒng)能耗、鉆桿內(nèi)徑強(qiáng)度和剛度的限制,由于鉆采孔徑較小,根據(jù)經(jīng)驗(yàn)值,h的取值范圍為0.1D~0.15D。
由以上分析可知,若想降低系統(tǒng)能耗,提高鉆取采樣輸月壤效率,則nz/v比值越小越好,因此以nz/v為優(yōu)化目標(biāo),對(duì)鉆桿結(jié)構(gòu)參數(shù)進(jìn)行優(yōu)化。
6 鉆桿結(jié)構(gòu)參數(shù)優(yōu)化
本文作者曾以鉆桿總功耗等為優(yōu)化目標(biāo),對(duì)鉆桿結(jié)構(gòu)參數(shù)進(jìn)行了多目標(biāo)優(yōu)化[21],此處不再贅述。本文以nz/v最小為優(yōu)化目標(biāo),開(kāi)展鉆桿結(jié)構(gòu)參數(shù)優(yōu)化。
設(shè)計(jì)變量為X={D,u0,α,h},目標(biāo)函數(shù)為
(16)
由圖11可見(jiàn),在迭代53次后收斂,nz/v最佳值為214.180。鉆桿結(jié)構(gòu)參數(shù)的優(yōu)化結(jié)果見(jiàn)表1。
由表1可見(jiàn),優(yōu)化后的nz/v降低了13.8%。可按表1的優(yōu)化結(jié)果選取鉆桿結(jié)構(gòu)參數(shù)。

圖11 遺傳算法優(yōu)化圖
Fig. 11 Optimization by genetic algorithm
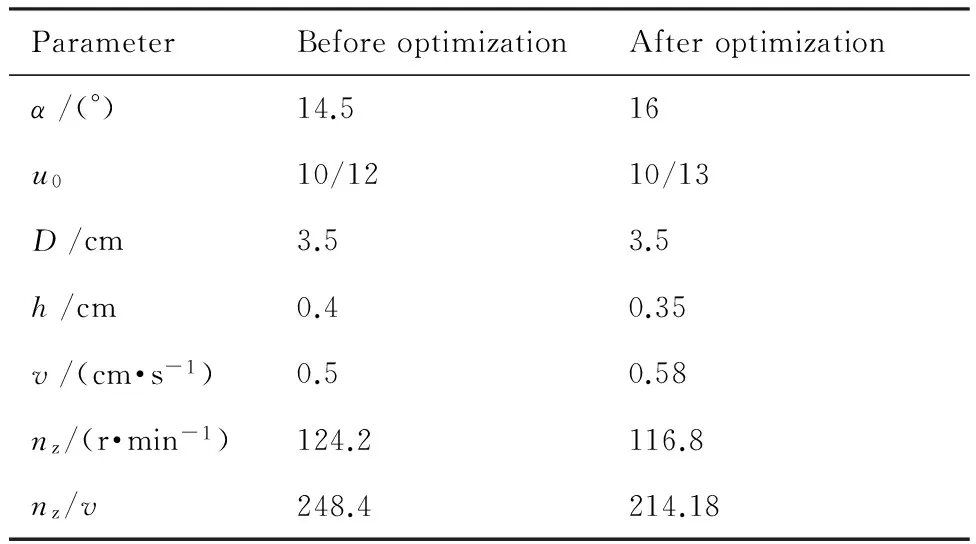
表1 優(yōu)化前后鉆桿結(jié)構(gòu)參數(shù)的對(duì)比
Note: * Trial value is from some type automatic drilling sampling mechanism.
7 結(jié) 論
1) 在綜合考慮了月壤物理和機(jī)械特性隨鉆進(jìn)深度變化關(guān)系、鉆桿鉆進(jìn)牽連速度及月壤微元相互間的抗剪性的情況下,所建立的鉆桿結(jié)構(gòu)參數(shù)與鉆桿運(yùn)動(dòng)參數(shù)之間的模型符合月球鉆取采樣的工作要求,鉆桿運(yùn)動(dòng)參數(shù)的理論值與試驗(yàn)值之間誤差為8.62%,驗(yàn)證了所建模型的正確性。
2) 基于本文某鉆取機(jī)構(gòu)的運(yùn)動(dòng)參數(shù),可選擇表1給出的鉆桿結(jié)構(gòu)優(yōu)化參數(shù)。
3) 鉆桿螺旋葉片升角α在9°~19°區(qū)間,月壤塊螺旋升角β為5°時(shí),鉆桿提供較小的回轉(zhuǎn)速度即可實(shí)現(xiàn)孔底鉆屑的排出,此時(shí)系統(tǒng)能耗小、穩(wěn)定性好。
4) 鉆桿鉆進(jìn)速度v和轉(zhuǎn)速nz分別與槽寬比u0成正比關(guān)系,在功率允許的條件下,適當(dāng)?shù)脑黾觰0,可提高月壤排屑的流暢性,u0的取值范圍為0.7~0.9。
5) 鉆桿鉆進(jìn)速度v和轉(zhuǎn)速nz分別與外徑D呈負(fù)相關(guān),且在D=3.4cm之后變化趨于平緩,D越小鉆取采樣輸月壤量效率越高,要盡量減小D。而適當(dāng)增加D可以降低排屑時(shí)對(duì)鉆桿回轉(zhuǎn)速度的要求,從而減少系統(tǒng)能耗,D的取值范圍為3.4~4.0cm。
6) 鉆桿鉆進(jìn)速度v和轉(zhuǎn)速nz分別與螺旋槽深h成正相關(guān),在剛度和強(qiáng)度要求得到滿足時(shí),適當(dāng)增加h可提高排屑的通暢性;h的減小可降低排屑時(shí)對(duì)nz的要求,從而減少系統(tǒng)能耗。根據(jù)經(jīng)驗(yàn)值,h的取值范圍為0.1D~0.15D。
[1] 吳偉仁, 周健亮, 高薇, 等. 繞月探測(cè)衛(wèi)星飛行控制[M]. 北京: 中國(guó)宇航出版社, 2012: 5-20. WU W R, ZHOU J L, GAO W, et al. Lunar exploration satellite flight control[M]. Beijing: China Astronautic Publishing House, 2012: 5-20 (in Chinese).
[2] 龐彧, 劉志全, 李新立. 月面鉆取式自動(dòng)采樣機(jī)構(gòu)的設(shè)計(jì)與分析[J]. 中國(guó)空間科學(xué)技術(shù), 2012, 32(6): 16-23. PANG Y, LIU Z Q, LI X L. Design and analysis of automatic drilling sampling mechanism for lunar exploration[J]. Chinese Space Science and Technology, 2012, 32(6): 16-23 (in Chinese).
[3] 劉飛, 侯緒研, 全齊全, 等. 空心外螺旋鉆桿與月壤相互作用力學(xué)模型研究[J]. 機(jī)械制造, 2011, 49(567): 29-31. LIU F, HOU X Y, QUAN Q Q, et al. Study on the interaction mechanical model between hollow-external-screw drill rod and Lunar-soil[J]. Machinery, 2011, 49(567): 29-31 (in Chinese).
[4] 田野, 鄧宗全, 唐德威, 等. 月壤鉆探采樣裝置中的鉆桿結(jié)構(gòu)參數(shù)優(yōu)化設(shè)計(jì)及模擬試驗(yàn)[J]. 機(jī)械工程學(xué)報(bào), 2012, 48(23): 10-14. TIAN Y, DENG Z Q, TANG D W, et al. Structure parameters optimization and simulation experiment of auger in Lunar-soil drill-sampling device[J]. Journal of Mechanical Engineering, 2012, 48(23): 10-14 (in Chinese).
[5] 趙偉民, 顧迪民, 牛紅, 等. 螺旋鉆具上的土的運(yùn)動(dòng)分析[J]. 哈爾濱建筑大學(xué)學(xué)報(bào), 1999, 32(2): 71-73. ZHAO W M, GU D M, NIU H, et al. Motion analyses of the soil on the earth auger[J]. Journal of Harbin University of Civil Engineering and Architecture, 1999, 32(2): 71-73 (in Chinese).
[6] 李大佛, 雷艷, 許少寧. 月球鉆探取心特種鉆頭研制與試驗(yàn)[J]. 探礦工程 (巖土鉆掘工程), 2013, 40(2): 1-6. LI D F, LEI Y, XU S N. Study on particular coring bit for Lunar-soil drilling[J]. Exploration Engineering (Rock & Soil Drilling and Tunneling), 2013, 40(2): 1-6 (in Chinese).
[7] 鄧宗全, 田野, 唐德威, 等. 用于地外星體探測(cè)的一種新結(jié)構(gòu)取心鉆頭研究[J]. 機(jī)械工程學(xué)報(bào), 2013, 49(19): 104-110. DENG Z Q, TIAN Y, TANG D W, et al. Reseach on new structure coring bit for extraterrestrial bodies exploration[J]. Journal of Mechanical Engineering, 2013, 49(19): 104-110 (in Chinese).
[8] ROBERT C. The mission of Luna 24 [EB/OL]. (1998-02-12)[2010-05-6]. http://www.zarya.info/Diaries/ Luna/Luna24.php.
[9] ROBERT C. The mission of Luna 16[EB/OL]. (1998-02-12)[2010-05-26]. http://www.zarya.info/Diaries/ Luna/Luna16.php.
[10] 劉志全, 龐彧, 李新立. 深空探測(cè)自動(dòng)采樣機(jī)構(gòu)的特點(diǎn)及應(yīng)用[J]. 航天器工程, 2011, 20(3): 120-125. LIU Z Q, PANG Y, LI X L. Characteristic and application of automatic sampling mechanisms for deep space exploration[J]. Spacecraft Engineering, 2011, 20(3): 120-125 (in Chinese).
[11] 鄒猛, 李建橋, 何鈴, 等. 不同粒徑分布模擬月壤承壓特性試驗(yàn)研究[J]. 航空學(xué)報(bào), 2012, 33(12): 2338-2346. ZOU M, LI J Q, HE L, et al. Experimental study on the pressure-sinkage characteristic of the stimulant lunar regolith with different particle size distributions[J]. Acta Aeronautica et Astronautica Sinica, 2012, 33(12): 2338-2346 (in Chinese).
[12] 鄭永春, 歐陽(yáng)自遠(yuǎn), 王世杰, 等. 月壤的物理和機(jī)械性質(zhì)[J]. 礦物巖石, 2004, 24(4): 14-19. ZHENG Y C,OUYANG Z Y, WANG S J, et al. Physical and mechanical properties of lunar regolith[J]. Journal of Mineralogy and Petrology, 2004, 24(4): 14-19 (in Chinese).
[13] 鄧宗全, 丁亮, 高海波, 等. 月壤特性對(duì)月球車輪地相互作用力的影響[J]. 哈爾濱工業(yè)大學(xué)學(xué)報(bào), 2010, 42(11): 1724-1729. DENG Z Q, DING L, GAO H B, et al. Influence of soil properties on lunar rover’s wheel-soil interaction mechanics[J]. Journal of Harbin Institute of Technology, 2010, 42(11): 1724-1729 (in Chinese).
[14] 金大瑋, 李建橋, 黨兆龍, 等. 滑轉(zhuǎn)條件下月球車輪沉陷模型研究[J]. 航空學(xué)報(bào), 2013, 34(5): 1215-1221. JIN D W, LI J Q, DANG Z L, et al. Study on model for sinkage of lunar rover wheel under slip[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(5): 1215-1221 (in Chinese).
[15] MITCHELL J M. Mechanical properties of lunar soil: Density, porosity, cohesion, and angle of interal friction[C]//Proceedings of the Third Lunar Science Conference. Houston, Texas: Lunar Science Institute and NASA, 1972(3): 3235-3253.
[16] 丁希侖, 李可佳, 尹忠旺. 面向月壤采集的多桿深層采樣器[J]. 宇航學(xué)報(bào), 2009, 30(3): 1189-1194. DING X L, LI K J, YIN Z W. Multi rod deep driller for lunar subsurface sampling[J]. Journal of Astronautic, 2009, 30(3): 1189-1194 (in Chinese).
[17] 褚桂柏, 張熇. 月球探測(cè)器技術(shù)[M]. 北京: 中國(guó)科學(xué)技術(shù)出版社, 2007: 59-60. CHU G B, ZHANG H. Lunar exploration technology[M]. Beijing: China Science and Technology Press, 2007: 59-60 (in Chinese).
[18] ORAVEC H A, ZENG X, ASNANI V M. Design and characterization of GRC-1: A soil for lunar terramechanics testing in Earth-ambient conditions[J]. Journal of Terramechics, 2010, 47(6): 361-377.
[19] JANOSI Z, HANAMOTO B. Analytical determination of drawbar pull as a function of slip for tracked vehicle in deformable soils[C]//Proceedings of 1st International Conference of ISTVS. Torino: International Society for Terrain-Vehicle Systems, 1961: 707-726.
[20] HEIKEN G, VANIMAN D, FRENCH B, Lunar sourcebook—a user’s guide to the moon[M]. New York: Cambridge University Press, 1991: 522-530.
[21] 王麗麗, 劉志全, 吳偉仁, 等. 月球鉆取式自動(dòng)采樣機(jī)構(gòu)螺旋鉆桿結(jié)構(gòu)參數(shù)的多目標(biāo)優(yōu)化[J]. 宇航學(xué)報(bào), 2015, 36(6): 723-730. WANG L L, LIU Z Q, WU W R, et al. Multi-objective optimization to drill stem structural parameters of lunar automatic drilling sampling mechanism[J]. Journal of Astronautics, 2015, 36(6): 723-730.
王麗麗 女, 博士研究生, 主要研究方向: 航天器結(jié)構(gòu)與機(jī)構(gòu)技術(shù)。
E-mail: liliwang5188@163.com
劉志全 男, 博士, 研究員, 博士生導(dǎo)師, 中國(guó)航天科技集團(tuán)公司學(xué)術(shù)技術(shù)帶頭人。主要研究方向: 航天器結(jié)構(gòu)與機(jī)構(gòu)技術(shù)、可靠性技術(shù)。
Tel.: 010-68747342
E-mail: liuzhiquanymj@sina.com
Received: 2015-01-07; Revised: 2015-01-26; Accepted: 2015-03-12; Published online: 2015-03-30 15:00
URL: www.cnki.net/kcms/detail/11.1929.V.20150330.1500.002.html
Foundation item: National Key Project of Science and Technology (TY3Q2011xxx01)
*Corresponding author. Tel.: 010-68747342 E-mail: liuzhiquanymj@sina.com
Analysis of drill stem structural and kinematic parameters of lunar drilling sampling mechanism
WANG Lili1, 2, LIU Zhiquan1, 2, *, WU Weiren1, 3, ZHANG Zhijing1
1.MechanicalandVehicularEngineeringCollege,BeijingInstituteofTechnology,Beijing100081,China2.ChinaAcademyofSpaceTechnology,Beijing100094,China3.LunarExplorationandAerospaceEngineeringCenter,Beijing100037,China
In respect of the sampling process of the hollow-external-screw drill stem for automatic drilling sampling mechanism, the mathematical models between the cohesive force, friction coefficient of lunar-soil and the lunar-soil depth are built separately; the relationships between drill stem kinematic parameters (drill stem drilling speed and rotary speed) and the structural parameters (drill stem spiral angle, outside diameter, groove width ratio and spiral grooved depth in the drilling process) are also established. These models take into account not only the characteristics of lunar-soil physical and mechanical parameters changing with drilling depth and drill stem drilling convected velocity, but also the shear resistance among lunar-soil infinitesimals. Such approach subjects the drill stem’s parameters to the job requirement of lunar drilling sampling. The effectiveness of the model is validated and the analysis of the influence of the drill stem structural parameters on its kinematic parameters is conducted with the models. As a result, the influence law of the drill stem structure parameters on its kinematic parameters is revealed, and the best value range of drill stem structure parameters is obtained. Taking the minimum value of the ratio between the drill stem rotary speed and drilling speed as optimal object and the structural parameters as design variables, based on genetic algorithm, the structural parameters of drill stem are optimized. Before and after optimization, the ratio of drill stem rotary speed to drilling speed is reduced by 13.8%. The research results will reduce the energy consumption and improve the efficiency, which provide a theoretical basis for the design of automatic drilling sampling mechanism.
drilling sampling mechanism; hollow-external-screw drill stem; structural parameters; kinematic parameters; lunar-soil; sampling
2015-01-07; 退修日期: 2015-01-26; 錄用日期: 2015-03-12; < class="emphasis_bold">網(wǎng)絡(luò)出版時(shí)間:
時(shí)間:2015-03-30 15:00
www.cnki.net/kcms/detail/11.1929.V.20150330.1500.002.html
國(guó)家重大科技專項(xiàng)(TY3Q2011xxx01)
.Tel.: 010-68747342 E-mail: liuzhiquanymj@sina.com
王麗麗, 劉志全, 吳偉仁, 等. 月球鉆取采樣機(jī)構(gòu)的鉆桿結(jié)構(gòu)與運(yùn)動(dòng)參數(shù)分析[J]. 航空學(xué)報(bào), 2016, 37(2): 738-748. WANG L L, LIU Z Q, WU W R, et al. Analysis of drill stem structural and kinematic parameters of lunar drilling sampling mechanism[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(2): 738-748.
http://hkxb.buaa.edu.cn hkxb@buaa.edu.cn
10.7527/S1000-6893.2015.0075
V19
: A
: 1000-6893(2016)02-0738-11
*
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中華詩(shī)詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50