捷聯導引頭線性區策略研究*
2016-03-02 06:24:31黃敘磊郗俊杰黎海青
彈箭與制導學報 2016年5期
黃敘磊,郗俊杰,黎海青,王 根
(中國兵器工業第203研究所,西安 710065)
捷聯導引頭線性區策略研究*
黃敘磊,郗俊杰,黎海青,王 根
(中國兵器工業第203研究所,西安 710065)
文中介紹了捷聯激光導引頭工作原理,提出了旋轉彈捷聯激光導引頭線性區判斷的問題,并提出了幾種線性區判定策略,同時分別對各策略進行了詳細分析,確定了一種較優的策略。研究了導引頭工作在線性區外時的控制方案,此方案對我國低成本捷聯制導彈藥裝備發展具有一定的借鑒意義。
捷聯導引頭;線性區;控制
0 引言
捷聯尋的制導通常包括全捷聯和半捷聯兩種方式。全捷聯方式徹底取消了機械回轉機構,優點是體積、成本均大幅降低,可靠性提高,跟蹤速度和跟蹤精度不受機械限制和摩擦力矩影響,缺點是探測器需要較大的瞬時視場,同時視線角速率提取十分困難。根據尋的制導方式不同,目前廣泛應用的激光半主動捷聯尋的制導、捷聯成像尋的制導和捷聯雷達尋的制導等均可實現全捷聯制導。下面線性區策略研究以激光捷聯導引頭為例。
1 捷聯激光導引頭線性區原理
相對于平臺激光導引頭來說,捷聯激光導引頭沒有內外區之分,其只有線性區與非線性區的區別。在不考慮導引頭死區、線性度等對輸出的影響下,其輸出曲線如圖1所示。
從圖1可以看出圖中虛線所畫部分內導引頭輸出的曲線呈線性變化,虛線外的部分由于探測器的硬件因素,因此無法滿足線性化的要求,所以必須對導引頭輸出信號進行限幅。
激光捷聯導引頭輸出的兩路角偏差信號uΔy、uΔz,其能夠輸出的所有值的集合構成了線性區。
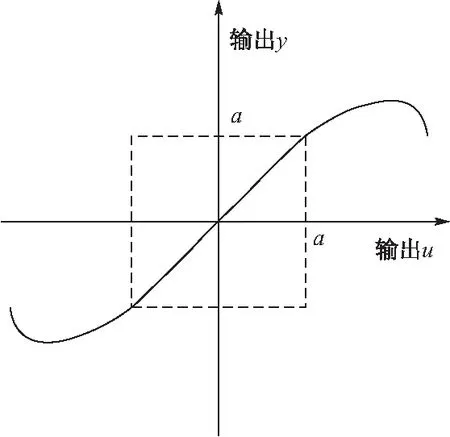
圖1 導引頭輸出曲線
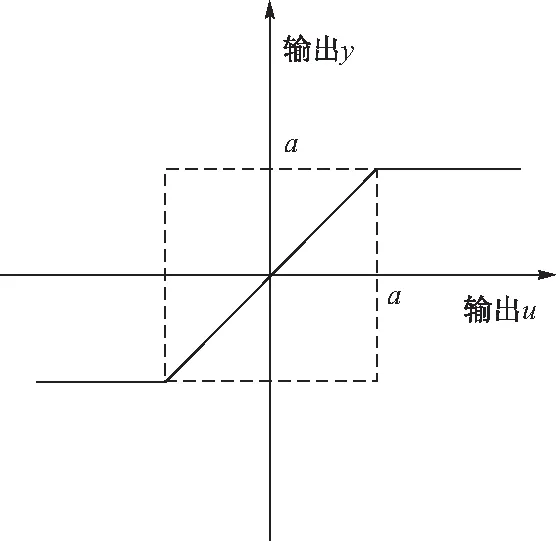
圖2 導引頭限幅后的輸出曲線
如圖3所示虛線區域內為線性區,實線部分內為導引頭的視場,虛實線之間為導引頭非線性區(即限幅區)。由圖3可以看出導引頭其線性區比較小。當飛行過程中由方案控制段轉入導引段時,即導引頭剛捕獲目標時,導引頭輸出的角偏差信號一般處于非線性區,所以必須減少導引頭處于非線性區工作時間,盡快進入線性區。
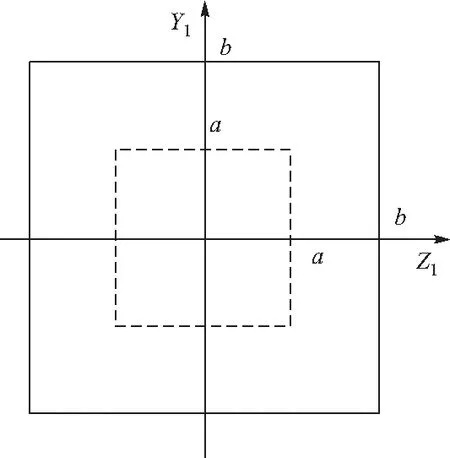
圖3 導引頭線性區
2 捷聯激光導引頭非線性區控制策略
通過控制系統作用,當捷聯導引頭在非線性區時,通過偏置追蹤末制導方式控制指令使彈軸快速向彈目線方向轉動,使捷聯導引頭盡快工作在線性區;線性區內采用導引控制,非線性區采用偏置追蹤末制導方式控制,線性區內外控制方式自動切換。
具體的指令設計為:
式中:Uy、Uz分別為俯仰、偏航通道導引頭輸出幅值;U1、U2分別為俯仰、偏航控制指令;Tdy為導引頭捕獲目標時刻;c為導引頭線性區系數;k1、k2為俯仰、偏航通道控制器系數,如為軸對稱彈則k1=k2。
彈體在飛行過程中,當導引頭捕獲目標且進入控制系統設計的導引開始時間時刻Tb,開始判斷導引頭偏差信號,當連續N幀信號均小于a°即進入線性區,按導引方案進行制導,當連續N幀信號均大于a°時即進入線性區外時,再次按偏置追蹤末制導方式控制,直至拉入線性區內,且兩種制導方式在初次切換過程中設計過渡時間,保證切換過程指令平滑性,使彈體姿態變化平緩。
式中:Td為彈體時間常數;Tz為激光編碼照射周期。
圖4為某彈飛行數據,在Tdy=5.296 s時刻開始由方案控制段轉入制導段,剛進入制導段時,導引頭輸出的角偏差信號處于非線性區(B=0,B為線性區標志量值),此時按偏置追蹤末制導方式進行控制;當7.508 s時,導引頭輸出的角偏差信號處于線性區(B=1),此時按導引方案進行制導;當9.432 s時,導引頭輸出的角偏差信號處于非線性區(B=2),此時按偏置追蹤末制導方式進行控制,且兩種末制導方式不再過渡;從圖4看出,此發彈在飛行過程中進行了6次線性區邊緣的自動切換,直至最終命中目標,表明此捷聯導引頭線性區邊緣控制方法可行。
圖4 線性區邊緣控制方式自動切換標志量
3 旋轉彈捷聯導引頭線性區控制問題的提出
通過數據可以看出上述控制策略對傾斜穩定彈是可行的,但對于旋轉彈則出現了新的問題。

圖5 旋轉彈導引頭線性區示意圖
4 旋轉彈捷聯導引頭線性區控制策略
針對旋轉彈在線性區邊緣的現象研究出以下策略:
將旋轉彈在彈體系下測的角誤差信號投影到準彈體坐標系,對于超出輸出軸線性區的角誤差信號進行限幅,Y2、Z2軸輸出的信號分別為Uy、Uz。其計算公式為:
(3)
式中r為彈體滾轉角。
圖6 準彈體系下導引頭線性區示意圖


策略5:半徑為a的圓。

策略6:改進的半徑為a的圓。
5 仿真結果研究
為了驗證以上6種策略的效果,對其進行彈道仿真。仿真條件選取某型導彈遠射程典型彈道,該型導彈為旋轉彈使用捷聯激光導引頭,其飛行的彈道特點為末制導段其導引頭輸出處于線性區邊緣。
仿真結果見表1。

表1 旋轉彈捷聯激光導引頭線性區控制策略對比結果
為了進一步驗證各策略方法在實際條件下的適用情況,對該導彈增加側向10 m/s的恒值常風,仿真結果如表2。
從表1和表2可以看出,策略4和6在無風條件下出線性區次數和脫靶量無差別,相比策略5脫靶量還要略高。但在常風干擾作用下,導引頭側向輸出值變大,導致策略4出線性區次數及脫靶量直接上升,綜合考慮策略6方法較其余方法更優。
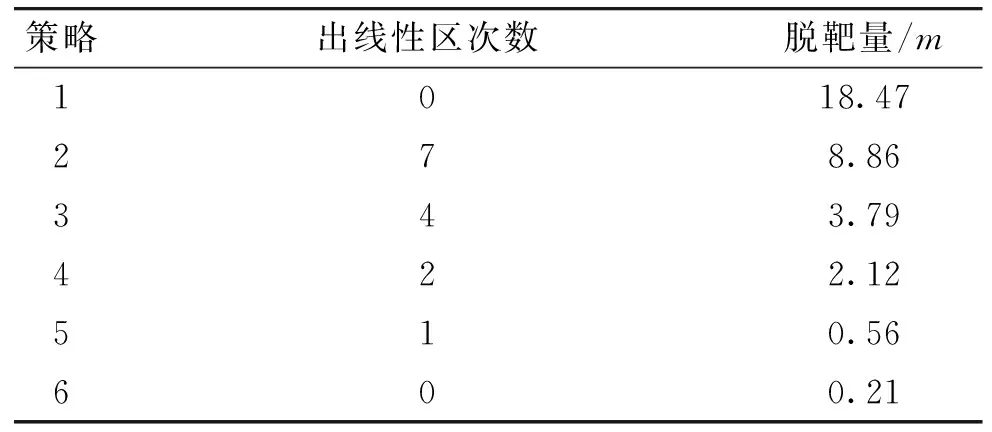
表2 旋轉彈捷聯導引頭線性區控制策略對比結果(恒風)
6 結論
文中通過介紹捷聯激光導引頭工作原理引出了旋轉彈捷聯激光導引頭線性區判斷的問題,在闡述問題的同時提出了線性區外控制方案及幾種線性區判定策略,并分別對各策略進行了詳細分析,最終確定了一種較優的策略。
[1] 鄧仁亮. 光學制導技術 [M]. 北京: 國防工業出版社, 1992.
[2] 林喆. 捷聯成像尋的系統制導信息處理方法研究 [D]. 哈爾濱: 哈爾濱工業大學, 2007.
[3] 李璟璟. 捷聯成像導引頭視線角速率估計方法研究 [D]. 哈爾濱: 哈爾濱工業大學, 2008.
[4] 梅林林, 李擎, 范軍芳. 基于捷聯導引頭的比例導引制導律設計 [J]. 系統仿真學報, 2011, 23(增刊): 200-203.
[5] 張躍, 儲海榮. 捷聯式光學導引頭特性與多維度最優制導律 [J]. 紅外與激光工程, 2013, 42(11): 2967-2973.
Study on Strategy of Linear Region of Strapdown Seeker
HUANG Xulei,XI Junjie,LI Haiqing,WANG Gen
(No.203 Research Institute of China Ordnance Industries, Xi’an 710065, China)
In this paper, the working principle of strapdown laser seeker was introduced. The problem of judging linear region of strapdown laser seeker was proposed. Several linear region decision strategies were proposed, and the strategies of each strategy were analyzed in detail. A better strategy was determined. The control scheme for seeker working out of the linear was studied. This scheme has certain reference significance for development of low cost strapdown guidance ammunition equipment in our country.
strapdown seeker; linear region; control
2016-02-26
黃敘磊(1985-),男,陜西西安人,工程師,碩士,研究方向:導彈制導控制。
TJ765.339
A
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
數學大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(2016年1期)2016-04-16 04:57:26