車輛轉向穩定性控制策略聯合仿真*
2016-03-04 06:13:39李勝琴
武漢理工大學學報(交通科學與工程版) 2016年1期
李勝琴 楊 慶
(東北林業大學交通學院 哈爾濱 150040)
?
車輛轉向穩定性控制策略聯合仿真*
李勝琴楊慶
(東北林業大學交通學院哈爾濱150040)
摘要:本文對車輛在轉向行駛過程中穩定性的控制策略進行研究.在ADAMS/Car中建立整車系統模型并加以驗證.根據車輛失穩的主要原因,在MATLAB/Simulink中設計以控制各車輪制動力為目標的控制器,依據模糊控制理論建立車輛轉向穩定性控制聯合仿真模型,在不同路面附著系數下,分別針對雙移線、正弦延遲及蛇形工況下車輛進行仿真試驗,分析在有無控制下車輛橫擺角速度和質心側偏角的變化.仿真結果表明,施加控制的車輛行駛路徑保持較好,橫擺角速度和質心側偏角能夠得到很好的控制,車輛行駛穩定性得到保障,證實了控制策略的有效性.
關鍵詞:轉向穩定性;ADAMS/Car;模糊控制;聯合仿真
李勝琴(1976- ):女、工學博士,副教授,主要研究領域為車輛系統動力學及控制
*國家自然科學基金青年基金資助項目(批準號:51205055)、中央高校基本科研業務費專項資金項目(批準號:DL13CB07)資助
0引言
據不完全統計,僅在過去的10 a當中,我國就有近90萬人死于各類道路交通事故.相關專業部門分析了導致這種嚴重傷亡交通事故的原因,結果顯示,超過60%的事故都是因為發生了側向失穩碰撞,30%~40%的事故起因是超速行駛、突然轉向或者操作不當;而據另一項數據統計顯示,車輛行駛速度越高就越容易發生交通事故,當車速在80~100 km/h范圍內時,與車輛側向失穩有關的事故大概約占到40%,當車速超過160 km/h時,全部交通事故幾乎都由側向失穩造成[1-2].所以提高車輛的安全性,尤其是提高車輛高速轉向時的主動安全性成為汽車設計及研發人員面對的一項艱巨任務.
國外學者對車輛穩定性控制算法進行了大量理論性的研究.Buckholtz[3]研究的重點是如何通過分配車輪的滑移率,進而在模糊控制理論的基礎上控制車輛的橫擺角速度和質心側偏角;Toshihiro Hiraoka等[4]也對車身橫擺角速度和質心側偏角的控制進行了研究,但他們是以滑模變結構控制理論作為研究的理論基礎;Masao Nagai等[5]在控制車輛穩定性的時候,采用的是復合反饋的方法;van Zanten等[6]基于最優控制原理開發了Bosch被廣泛應用的電子穩定程序——ESP.國內對汽車操縱穩定性的研究始于上世紀70年代,起步比較晚.由于缺少試驗條件,大多數學者只是基于理論研究,通過仿真的形式,提出ESP系統的設計中具體遇到的問題,他們研究的側重點各有不同,一部分學者探討的是ESP系統具體實現問題,一部分學者把研究重點放在控制算法的驗證上.宋健等[7]對ABS系統中的電磁閥特性進行了分析,并在此基礎上討論了ESP的控制算法及策略;上海交通大學開展的“汽車動力學控制系統開發與實車試驗”項目,建立了ESP混合仿真模擬試驗臺并在試驗臺的基礎上研究了ESP系統的動態特性,為國內對ESP系統的深入研究提供了極具參考價值的數據和經驗[8];劉昭度等[9]從集成化液壓控制單元及液壓特性方面入手,進行ESP集成控制系統的研究;郭孔輝等[10-11]在ESP控制算法和ESP系統評價方法方面做了大量深入的研究,應用邏輯門限值方法,分析車輛在不同狀態下的控制邏輯,并且根據人-車-路閉環系統模型,對ESP系統進行評價.除了各大高校,中國重汽集團、上海大眾、奇瑞等汽車企業也在車輛穩定性控制方面開展了研究工作.
文中以車輛轉向穩定性作為研究重點,利用仿真軟件ADAMS建立車輛動力學模型并與MATLAB結合進行聯合仿真,以車身的橫擺角速度和質心側偏角作為控制目標建立模糊控制器,進行車輛轉向穩定性的模擬仿真,與試驗結果對比,并驗證控制策略的有效性.
1車輛動力學模型
汽車是由幾萬個零部件組成的,而整車建模又是一個極其復雜的過程,對車輛的真實結構進行建模,工作量大,若根據研究目的的不同,對車輛結構進行相應的、合理的簡化,操作起來更為方便的同時又能得到比較合理的研究結果.
ADAMS/Car是ADAMS軟件的模塊之一,是一種基于模板建模和仿真的工具,簡化了建模的步驟并加快了建模的速度,用戶只需要在模板中輸入數據,就可以快速的建立高精度整車虛擬樣機模型,模型中包括車身系統、懸架系統、傳動系統、發動機、轉向機構系統、制動系統等.
本文根據給定的某車型基本參數確定硬點坐標及各部件之間的連接,建立各系統模型.圖1中a)~f)為建立好的各系統模型.把建立好的各個子系統模型組裝即可創建整車模型,建立好的整成模型見圖2.

圖1 各子系統模型

圖2 整車動力學模型
為了驗證所建立的整車動力學模型是否正確、有效,進行干路面工況下的車輛轉向穩定性的一系列仿真試驗,并與實車路上試驗數據進行對比.
運用ADAMS/Car軟件進行轉向穩定性的仿真,首先需要編寫與整車轉向穩定性試驗相關的數據文件,包括驅動控制文件和驅動控制數據文件.在驅動控制試驗中,將轉向盤轉向、節氣門開度、離合器開合、檔位大小和制動等作為控制變量,通過改變它們的數值,來完成整車轉向穩定性的仿真與結果分析.
圖3為干路面工況下雙移線的試驗值及模擬值的比較,檔位為三檔、車速為40 km/h,仿真時間7 s,步長0.01 s,μ=0.8;圖4為三檔檔位、車速40 km/h,仿真時間12 s,步長0.01 s時在干路面工況下蛇形繞障試驗的試驗值與模擬值比較,μ=0.8.

圖3 雙移線試驗車輛橫擺角速度對比

圖4 蛇形試驗車輛橫擺角速度對比
由圖3、圖4可見,所建立的整車動力學模型的仿真結果與試驗結果吻合較好,認為所建模型準確,可以用來進行整車動力學性能的仿真分析,兩者之間未能完全重合可能是由于建立模型時對各系統進行了相應的簡化造成的.
2聯合仿真模型
采用目前廣泛應用的二維模糊控制器.具體說來就是選取車輛的實際橫擺角速度、實際質心側偏角與車輛參考模型的理想橫擺角速度、理想質心側偏角之間的誤差e以及誤差變化率ec作為模糊控制器的輸入變量,模糊控制器的輸出變量設為車輪的制動力矩u.控制器將根據輸入變量的變化,計算出所需要的制動力矩的大小,最后由制動力分配器通過各個車輪上的控制器進行制動力的分配,最主要的目標就是使這兩個參數的理想值和實際值的偏差達到最小.在實際應用中為了表達的更清楚,一般用模糊規則表的形式見表1.
最后,由輸入變量、輸出變量的隸屬函數及模糊控制規則建立起來的雙輸入、單輸出的Mamdani模糊控制器見圖5,建立完成之后保存到仿真文件夾中以備調用.設計的模糊控制模型見圖6.

表1 模糊規則表

圖5 模糊控制器
在ADAMS/Car中設置4個輸入變量為:左前輪制動力矩、左后輪制動力矩、右前輪制動力矩、右后輪制動力矩.4個輸出變量為:橫擺角速度、縱向速度、方向盤轉角、質心側偏角.建立聯合仿真模型見圖7.

圖6 模糊控制模型 圖7 聯合仿真模型
圖中“adams_sub”模塊是由ADAMS/Car導出的S-function模塊,這個模塊包含了整車的全部信息;“desired”模塊為線性二自由度理想模型,它完成車輛期望狀態參數的計算,“fuzzy”模塊是聯合仿真系統的核心,即制動力分配器,它主要完成車輛穩定性判斷和制動力的分配.
3控制策略驗證
3.1雙移線仿真
3.1.1干路面仿真
在干路面時,設定雙移線工況為三檔檔位、車速v=60 km/h、路面附著系數μ=0.8,仿真時間t=5 s、仿真步長0.01 s.仿真分析曲線見圖8~9.可以看出,在未施加控制時,車身從2.5 s便開始有明顯抖動,橫擺角速度和質心側偏角迅速變化,車體發生嚴重側偏,失去穩定性,偏離軌跡,駛離車道,說明此時可能已出現側滑或甩尾現象,易導致交通事故.而有控制時車輛能夠按照試驗路徑行駛,維持穩定狀態,安全性得到了保障.

圖8 干路面雙移線試驗-橫擺角速度
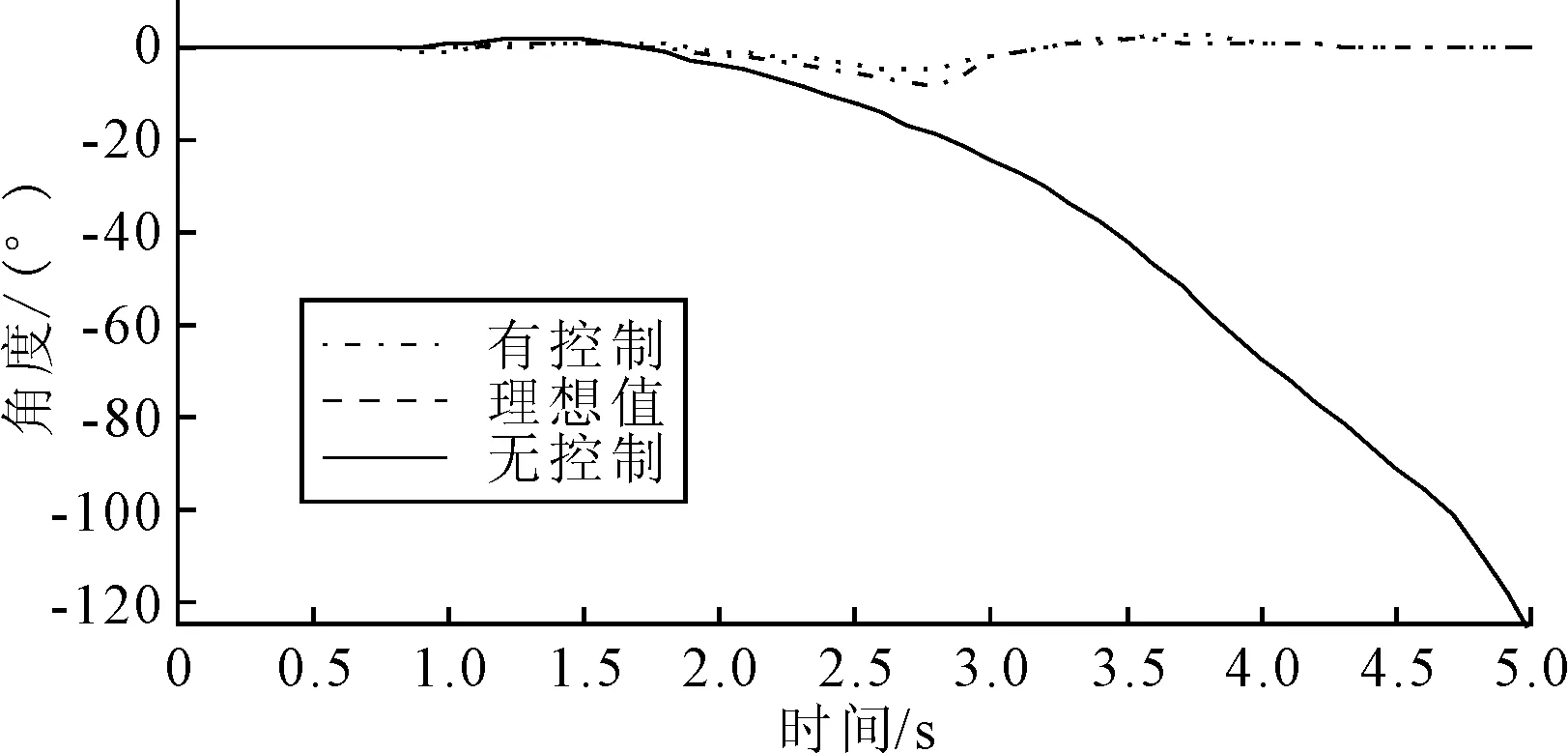
圖9 干路面雙移線試驗-質心側偏角
3.1.2冰雪路面仿真
將干路面試驗的轉向盤轉角作為輸入,進行冰雪路面條件下的雙移線試驗仿真,檔位仍為三檔、車速v=40 km/h、路面附著系數為μ=0.2、仿真時間t=5 s,仿真步長0.01 s.仿真曲線顯示,在冰雪路面上,沒有施加控制的車輛在開始階段的行駛比較平穩,2.5 s時出現不穩定趨勢,3.5 s之后完全失穩,橫擺角速度和質心側偏角的極速增大,車輛的最大橫擺角速度達到了-3 (°)/s,質心側偏角最大為-2.3°.而加入控制的車輛在整個行車過程中表現較好,得到的控制效果較為理想,橫擺角速度和質心側偏角的變化相對平緩,接近理想狀態,見圖10~11.
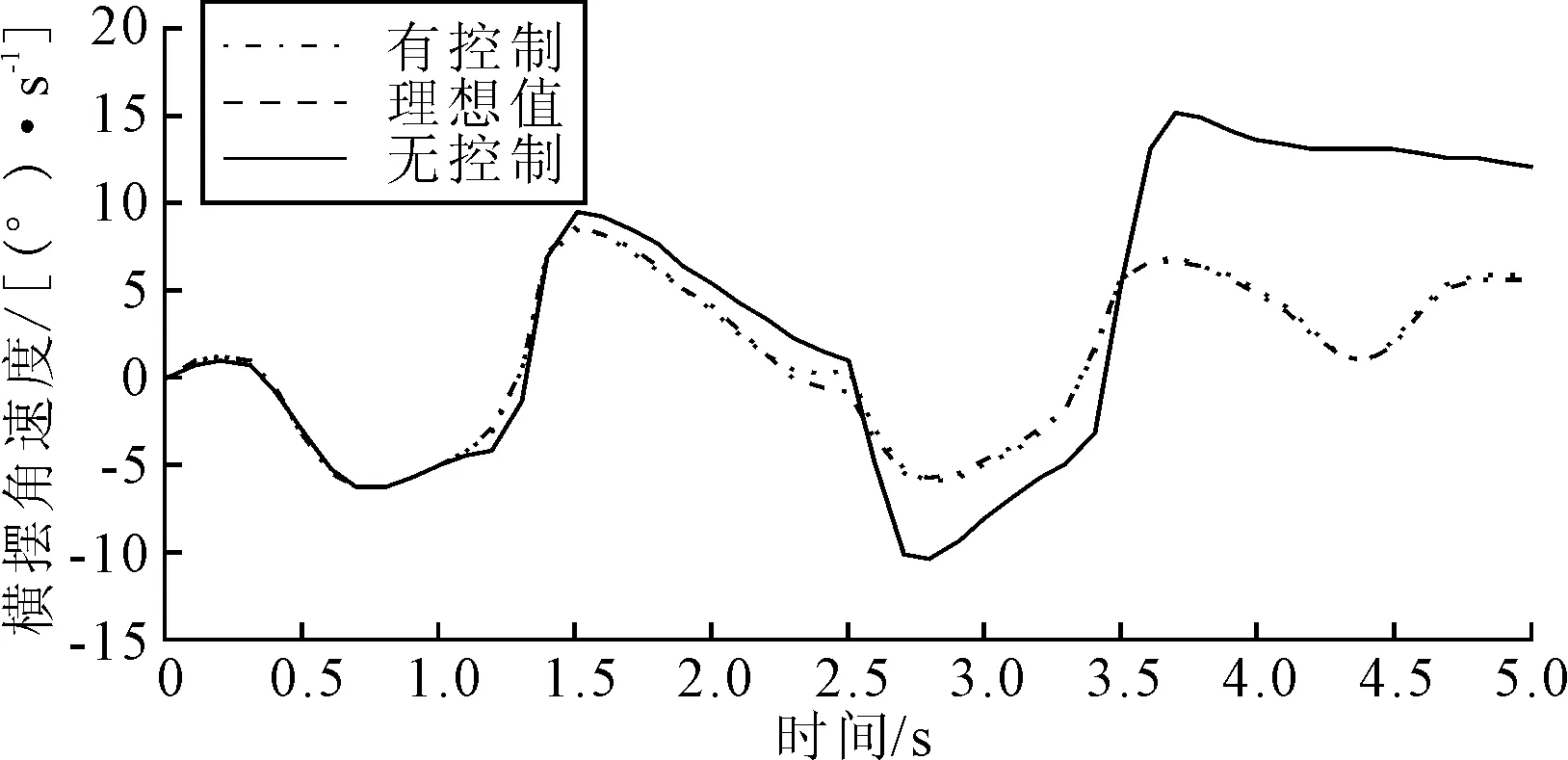
圖10 冰雪路面雙移線試驗-橫擺角速度

圖11 冰雪路面雙移線試驗-質心側偏角
3.2正弦延遲試驗仿真
3.2.1干路面仿真
設定的工況為四檔檔位、車速v=80 km/h、路面附著系數為μ=0.8、仿真時間t=5 s,仿真步長0.01 s,仿真曲線見圖12~13.根據曲線變化可知,沒有施加控制的車輛在2 s之前可以保持車身的行駛姿態,3 s之后開始出現不穩定狀況,3.5 s發生較為明顯的抖動,隨即失去控制,偏離軌跡,橫擺角速度最大值達到50 (°)/s,側偏角最大達到-14°.而加入控制的車輛,雖然相較于理想值較晚回正,但最終仍能保持運動軌跡,調整姿態后恢復穩定行駛狀態,接近理想值,保證了安全.

圖12 干路面正弦延遲試驗-橫擺角速度

圖13 干路面正弦延遲試驗-質心側偏角
3.2.2冰雪路面仿真
在這組冰雪路面的試驗中,設定車速小于干路面時的車速,v=70 km/h、檔位仍為四檔、路面附著系數為μ=0.2、仿真時間t=5 s,仿真步長0.01 s,仿真曲線見圖14~15.0~0.5 s時間內,未施加控制的車身保持運行平穩,0.5 s開始逐漸偏離運行軌跡,2.5 s時突然產生變化,車身側偏嚴重并有甩尾現象;車輛在冰雪路面上行駛,車身有控制時,試驗值與理想值之間有很小的差距,但整個運行過程中可以較好的保持行駛軌跡,能夠保證車輛運行的安全性.
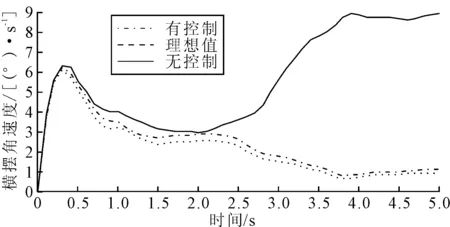
圖14 冰雪路面正弦延遲試驗-橫擺角速度
3.3蛇形試驗仿真
3.3.1干路面仿真
設定的工況為四檔、車速v=70 km/h、路面附著系數為μ=0.8、仿真時間t=7 s,仿真步長0.01 s,仿真曲線見圖16~17.沒有施加控制的車輛在4.6 s時候失去控制,出現甩尾的情況,同時也發生較為嚴重的側偏,最大側偏角達到-38°;而加入控制的車輛,能夠與理想值較為吻合,說明設計的控制器起到了一定的控制效果,可以使車輛一直保持較為理想的狀態.

圖16 干路面蛇形試驗-橫擺角速度
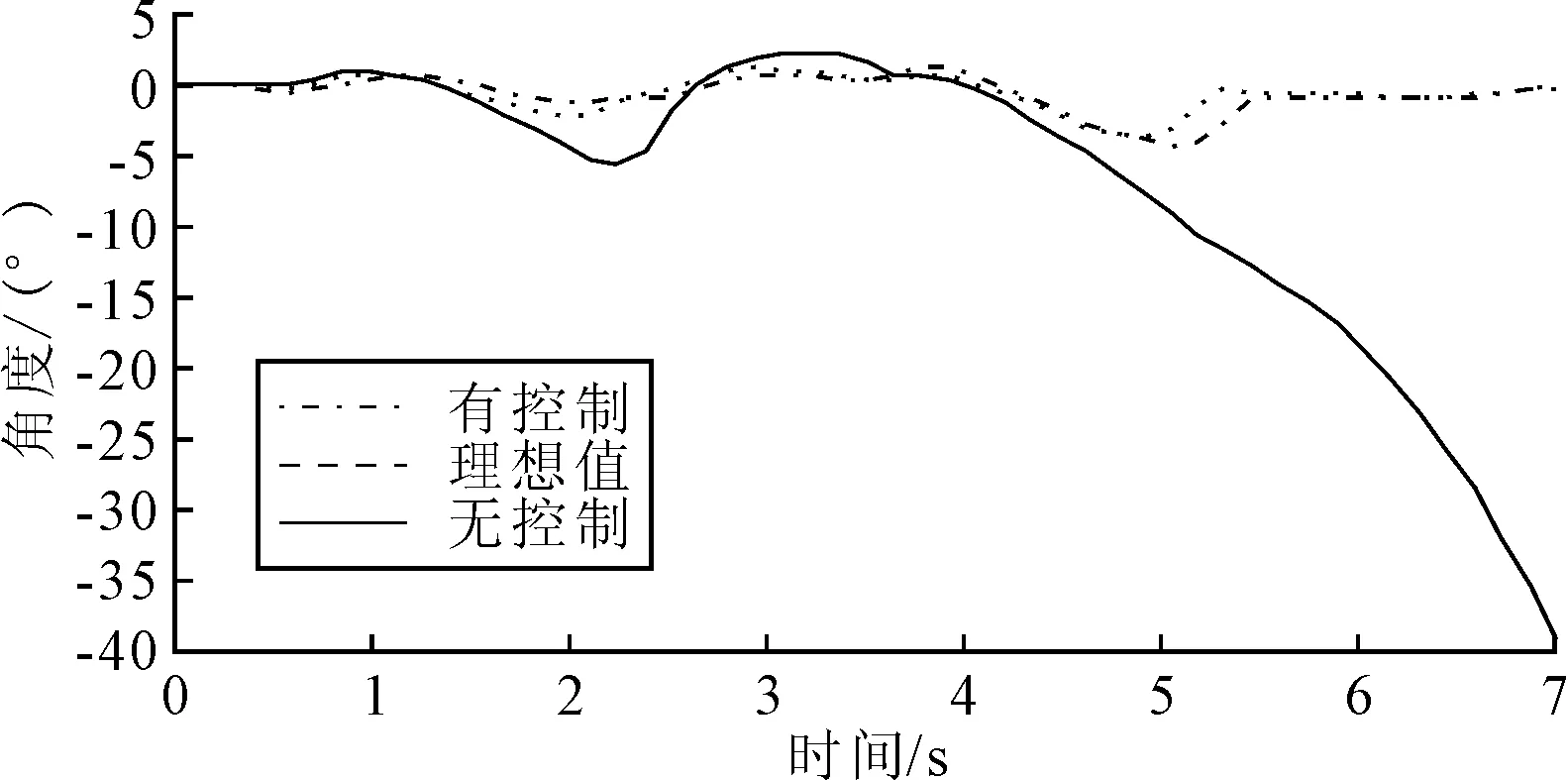
圖17 干路面蛇形試驗-質心側偏角
3.3.2冰雪路面仿真
將冰雪路面蛇形試驗的工況設定為三檔、車速v=40 km/h、路面附著系數為μ=0.2、仿真時間t=7 s,仿真步長0.01 s,仿真曲線見圖18~19.在沒有施加控制的時候,0~2.3 s內的行駛較為穩定,但隨即表現出了不穩定的趨勢,2.3 s時突然失去控制,橫擺角速度最大值達到-17°/s,側偏現象明顯,最后側偏角達到51°,直接可能導致車身甩尾和側偏,對汽車的行駛安全造成威脅,而加入控制之后便能很好的跟蹤理想值的曲線,表現出了較好的穩定性,同時也保證了行駛的安全.

圖18 冰雪路面蛇形試驗-橫擺角速度

圖19 冰雪路面蛇形試驗-質心側偏角
4結論
1) 以某型車為原型,利用ADAMS/Car建立包括前后懸架系統、制動系統等子系統在內的整車動力學模型,利用車輛試驗數據對動力學模型加以驗證,結果表明,所建立的動力學模型精度基本符合要求,能夠用于車輛轉向穩定性的仿真研究.
2) 對車輛轉向失穩的原因進行分析,基于模糊控制理論,以車輛橫擺角速度和質心側偏角的誤差及誤差變化率為輸入變量、車輛恢復穩定狀態所需要的制動力矩為輸出變量,設計模糊控制器,建立基于ADAMS/Car和MATLAB/Simulink的聯合仿真模型.
3) 選擇雙移線、正弦延遲、蛇形等三種路徑進行模擬仿真,設定不同的試驗工況,分別在干路面和冰雪路面進行模擬試驗,對車輛運動姿態進行比較分析.仿真分析結果表明,所建立的模糊控制策略,能夠相對的針對車輛在轉向過程中的出現的失穩狀態加以控制,可有效維持車輛的行駛穩定性.
參 考 文 獻
[1]NAGAI M. The perspectives of research for enhancing actives safety based on advanced control technology[J] .Vehicle System Dynamics,2007,45(5):413-431.
[2]Federal Motor Vehicle Safety Administration.Electronic stability control,No. 126[R].Washington, DC: National Highway Traffic Safety Administration,2006.
[3]BUCKHOLTZ K R. Use of fuzzy logic in wheel slip assignment-Part 1: yaw rate control with side slip angle limitation[J]. SAE,2002(1):1220-1226.
[4]TOSHIHIRO H, OSAMU N, HIROMISTR K.Model-following sliding mode control for active four-wheel steering vehicle[J]. JSAE,2004,25(4):305-313.
[5]MOTOKI S, MASAO N. Yaw-moment control of electric for improving handling and stability[J]. JSAE Review,2001,22:473-480.
[6]ANTON T, RAINER E, KLAUS L, et al. VDC System Development and perspective[J]. SAE Paper,NO.980235.
[7]鄭銀環,董森,趙燕.車輛道路耦合振動建模及仿真分析[J].武漢理工大學學報:交通科學與工程版,2015,39(2):325-328.
[8]王家輝.汽車ESP系統半動態測試臺架開發[D].上海:上海交通大學,2004.
[9]裴曉飛,劉昭度.車輛縱向動力學集成控制系統研究[J].汽車工程,2012(2):55-58.
[10]郭孔輝,丁海濤.輪胎附著極限下差動制動對汽車橫擺力矩的影響[J].汽車工程,2002(2):122-125.
[11]李幼德,劉巍,李靜,等.汽車穩定性控制系統硬件在環仿真[J].吉林大學學報:工學版,2007,37(4):89-92.
Co-simulation of Steering Stability Control Tragedy on Vehicle
LI ShengqinYANG Qing
(TrafficCollege,NortheastForestUniversity,Harbin150040,China)
Abstract:In this paper, the main research was about the control strategy on vehicle stability during the steering process. A vehicle system model was established in ADAMS/Car and confirmed the correctness.According to the main reason for the instability of the vehicle, a controller was designed to control the braking force of each wheel in the MATLAB/Simulink, the co-simulation model of the vehicle was established, used the fuzzy control strategy. accordingto some conditions like double lane change, the sine-delay and snake-like on different road adhesion coefficient,somevirtual testsof the vehicle modelwere proposed, to analyze the change of yaw rate and vehicle sideslip within or without control. Results showed that the vehicle could keep good agreement of traveling path if it was under the control, either the yaw rate and sideslip angle. It guaranteed safety of the vehicle, and the effectiveness of the control strategy was confirmed.
Key words:steering stability; ADAMS/Car; fuzzy control; co-simulation
收稿日期:2015-11-21
doi:10.3963/j.issn.2095-3844.2016.01.013
中圖法分類號:U461
