基于Matlab的線性二次高斯控制教學
——以旋翼飛行機器人的控制為例
2016-03-06 09:40:44陳陽吳春富馬桂芳
韶關學院學報 2016年12期
陳陽,吳春富,馬桂芳
(龍巖學院機電工程學院,福建龍巖364000)
基于Matlab的線性二次高斯控制教學
——以旋翼飛行機器人的控制為例
陳陽,吳春富,馬桂芳
(龍巖學院機電工程學院,福建龍巖364000)
以基于線性二次高斯控制的旋翼飛行機器人的速度跟蹤穩定控制為例,在Matlab軟件中進行編程計算及仿真,將抽象的線性二次高斯控制問題具體化,并就代價函數參數矩陣的選擇對系統的控制響應性能的影響進行了分析.整個建模仿真過程能夠幫助學生理解和掌握線性二次高斯控制理論.
線性二次高斯;旋翼飛行機器人;計算機輔助教學
在現代控制理論課程中,線性二次高斯(LQG)控制一般安排在該課程的最后教學環節中,其涉及了該課程前期的系統狀態空間描述、能控制、能觀性及穩定性等理論,通過LQG控制技術的學習能夠將現代控制理論教學內容有機地結合起來[1].然而實際教學往往采用公式推導的方式開展理論教學,導致學生對這一現代控制技術理解不夠深入.特別是LQG控制技術中涉及的狀態空間方法有著實際工程背景,其狀態轉移矩陣描述了被控對象的內在聯系.在一些復雜系統的控制中,LQG控制技術設計的控制器能夠考慮到系統狀態之間的耦合關系,因此其在雷達天線的旋轉跟蹤控制[2],船舶的運動控制[3],飛行器的飛行控制[4],汽車懸架控制[5]等領域都得到應用.基于LQG控制技術是一項與實際工程的模型系統密切相關的理論技術的考慮,如何幫助學生形象地理解并掌握LQG控制技術是教學中的難點.
本文以實際科研過程中的旋翼飛行機器人水平面動力學模型的速度跟蹤穩定控制為例,進行控制器設計,由于旋翼飛行機器人與生俱來的動力學狀態耦合[6],采用LQG控制技術能夠綜合考慮系統狀態間的聯系.本文將基于Matlab控制系統輔助設計軟件進行LQG速度跟蹤穩定控制器的設計、仿真與分析,并對LQG設計過程中涉及到的兩個關鍵權值矩陣對系統響應性能的影響進行分析,整個系統在Matlab的Simulink環境中進行仿真,形象直觀,利于學生掌握線性二次高斯控制理論的各個環節.
1 基于LQG技術的旋翼飛行機器人的姿態穩定控制
1.1 旋翼飛行機器人水平面動力學模型描述
當小型旋翼飛行機器人工作于懸停或低速飛行狀態下時,其動力學可分為耦合性可以忽略的兩個部分:一是作用于水平面的動力學,二是作用于垂直面的動力學,其中水平面的動力學主要由主旋翼產生的橫向與側向運動構成.此時旋翼飛行機器人用于控制律設計的水平面線性化模型的狀態空間表示形式如下式所示:

其中,系統狀態向量x=[u v θ φ q p asbs]T,u與v分別為前向及側向線速度、θ與φ分別為俯角及滾轉角、q與p分別為俯仰角速率及滾轉角速率、as與bs為帶有伺服小翼的旋翼揮舞運動在俯仰及滾轉通道的描述.系統控制向量u=[B1sA1s]T,B1s及A1s分別為俯仰及偏航通道的控制量.狀態轉移矩陣A、控制矩陣B及觀測矩陣C分別為:

式(2)矩陣C中的I6×6為6階單位矩陣,O6×6為6行2列的零矩陣.對于式(1)及式(2)所示的線性時不變系統,其狀態轉移矩陣A的特征值為系統的極點,可以體現系統的穩定性[1,7].在Matlab中通過命令Eig函數可以求出矩陣的特征值及特征向量,通過分析特征值與特征向量可以分析系統的動力學特性[7],包括穩定性與否,每種模態的固有頻率、阻尼比,以及系統中每個狀態量對給定輸出的貢獻程度的大小.表1所示為旋翼飛行機器人水平面模型對應的8個特征值,可以發現其中存在兩個包含正實部的特征根,此組特征值對應旋翼飛行機器人的非穩定模態,主要由前向及側向速度引起,可知系統不能長時間保持穩定懸停狀態,這與實際情況相符.因此小型旋翼飛行機器人在懸停或低速飛行時,其在長周期模態下是不穩定的.
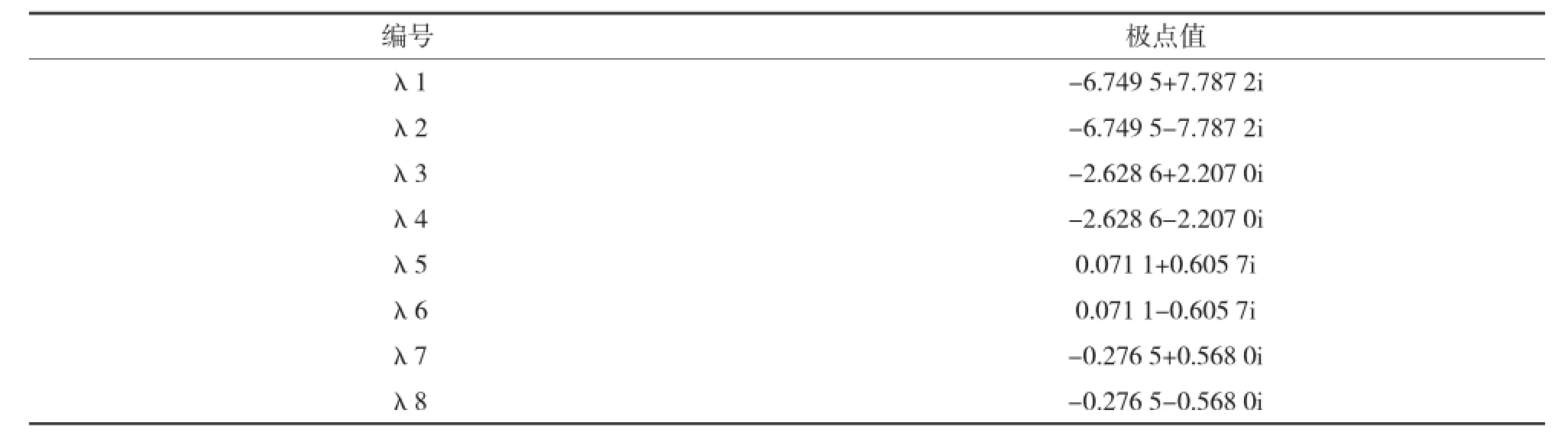
表1 旋翼飛行機器人水平面模型的系統極點
1.2 基于LQG的速度姿態穩定跟蹤控制
從上一節可以發現,旋翼飛行機器人的水平面動力學模型的狀態轉移矩陣包含一對非穩定的特征根,因此需要控制器鎮定其中的非穩定模態以保證飛行機器人的穩定控制.另一方面,從旋翼飛行機器人的線性模型可以知道,水平面模型中的狀態量as及bs不能通過傳感器直接測量出來.實際工程中的LQG設計是通過將線性二次狀態反饋調節器(LQR)與觀測器結合起來而完成的.一方面LQR技術將鎮定系統的非穩定狀態,另一方面觀測器將估計系統中的非測量狀態,同時能夠很好地跟蹤參考線速度uref及vref.整個控制器設計依據分離原則,包括LQR設計及線性二次估計(LQE)設計兩部分.圖1所示為在Matlab/Simulink中搭建的基于LQG的飛行機器人速度跟蹤控制器仿真圖、其中的前饋環節、積分環節及反饋環節的參數由LQR設計,估計器由LQE設計.
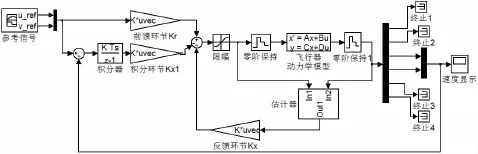
圖1 Matlab/Simulink中進行LQG控制器仿真
1.2.1 LQR跟蹤控制器
LQR控制器考慮了系統本身的耦合特性以鎮定旋翼飛行機器人,同時控制器中的積分及前饋兩個環節是為了提高跟蹤精度及響應速度.
為考慮系統對給定速度的跟蹤性能,將系統(1)增加性能輸出向量z如下:

參考指令r(t)與性能輸出z(t)之差表示為e=r-z,則e的積分為并定義新的狀態向量為x^=得到新的狀態方程為:


式(5)中Q是一半正定對稱矩陣,R為正定對稱矩陣.應用最優控制理論[1,7]可得優化控制器如下:

式(6)中控制參數kx^及kr可通過Matlab中Lqr函數求得.
1.2.2 LQE設計
考慮線性系統模型式(1)包含擾動的形式如下:

式(7)中w為過程噪聲,v為觀測噪聲,并假設為互不相干的零均值高斯白噪聲,且協方差矩陣分別為Qf及Rf.則可得優化估計器為:

式(8)中估計增益kf可通過Matlab中Lqe函數求得.
2 Matlab中仿真實驗分析
在使用LQG技術進行速度姿態穩定跟蹤控制時,從式(6)可知,矩陣Q及R分別是一個4維及2維的對稱方陣,為了簡化計算,實際中分別取Q及R為對角矩陣,根據LQR相關優化理論可知,大致有當Q陣中某一元素的權值增大時,與其對應的狀態量的動態響應過程好轉,系統快速性得到明顯提高,但相應地引入一些振蕩;當R中某一元素權值增大時,被控量幅值顯著減小,對應的動態性能有所改善,但不顯著.故首先通過在Matlab上針對不同Q、R下通過編程進行控制器計算,而后在Matlab中的Simulink環境中進行仿真,最后對比相關性能選取一組較為合適取值下的控制器參數.解算LQE估計器時涉及的Qf及Rf分別取為:Qf=0.001I8×8,Rf=0.001I6×6.
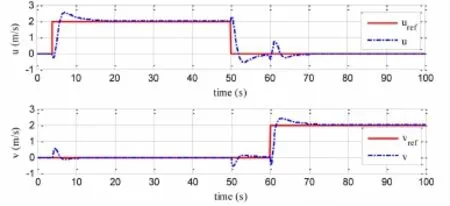
圖2 Q=diag(0.3,0.6,0.018,0.036),R=diag(15,10)下速度跟蹤響應

圖3 Q=diag(0.3,0.75,0.015,0.0375),R=diag(15,20)下速度跟蹤響應
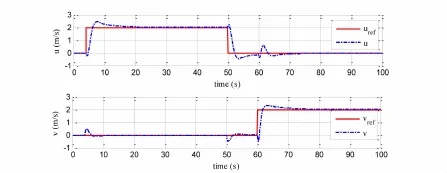
圖4 Q=diag(0.3,0.6,0.0075,0.015),R=diag(20,10)下速度跟蹤響應
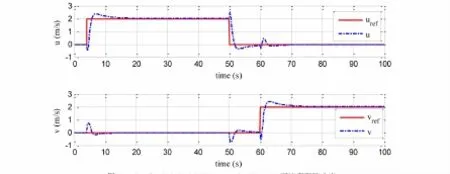
圖5 Q=diag(4,3,0.16,0.12),R=diag(37.5,50)下速度跟蹤響應
圖2~5所示為不同Q、R下,基于擴展LQG控制器的前向及側向目標速度跟蹤響應圖,可以發現4種Q、R取值情況下,速度跟蹤響應曲線都有一定程度的超調,但最后都回歸到了穩態,實際上前饋部分的引入在加快系統響應的同時,另一方面也引入了一定的超調,盡管如此,通過調節Q、R值,能夠在超調與響應時間之間得到一個折衷的選擇.為進一步比較上述四種不同Q、R取值情況下的控制系統響應性能,定義三個性能指標,一是階躍響應上升時間為:系統響應從0%到最終值95%所需的時間;二為最大超調量:(系統階躍響應最大值—系統階躍響應穩態終值)/系統階躍響應穩態終值;三為系統階躍響應與設定值之間的均方差;表2展示了不同Q、R取值情況下橫向及側向速度的跟蹤性能.

表2 不同Q、R取值情況下橫向及側向速度的跟蹤性能比較
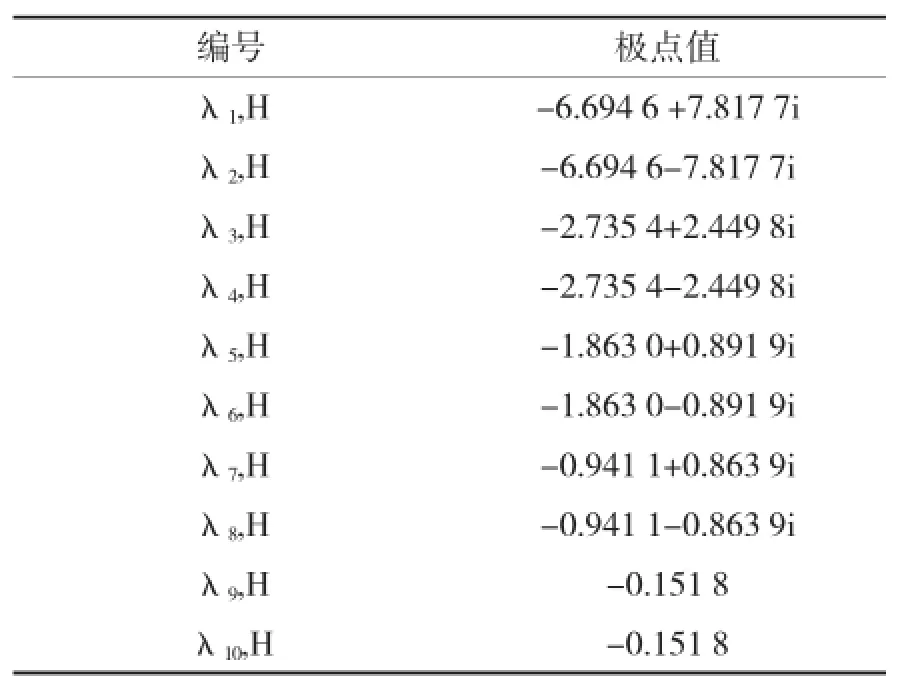
表3 旋翼飛行機器人增廣水平面模型鎮定后的極點
從表2可以看出,不同Q、R取值下得到的控制器對前向及側向目標速度的跟蹤性能在三個指標上具有差異性,從系統的響應速度上來說,矩陣Q上的值越大,對應目標速度跟蹤響應越快,但是從表中對比可以發現,控制系統對目標速度的響應時間、超調量及跟蹤精度不可能所有都達到最優,亦即當最大超調量為小時,系統的上升時間未必為短,如此,在實際控制器參數選擇時,需要進行一個折衷的考慮,根據上表可以發現,不同參數下得到的控制器對目標前向速度的響應時間在1.861~2.087 s之間,對目標側向速度的響應時間在1.488~1.622 s之間,當飛行機器人工作于懸停及低速飛行狀態時,可以認為此長度的響應時間對飛行機器人的飛行影響不大,因此上升時間的指標不作為實際控制器設計的一個重要指標.考察最大超調量及速度跟蹤均方差兩個指標時,發現基于第三種Q、R參數下所得到的控制器產生的響應性能相對較優(超調與MSE均較小),故選擇此情況下得到的控制器用以實現水平面模型的速度姿態穩定跟蹤控制.表3所示為第三種參數下旋翼飛行機器人增廣水平面模型鎮定后的極點,相比較于表1,可發現非穩定極點得到了鎮定.
3 結論
本文針對線性二次高斯控制問題,以實際科研中涉及的旋翼飛行機器人的水平動力學速度跟蹤穩定控制為例,利用Matlab語言編程,分析了模型的穩定性,而后求解速度姿態穩定控制器,并針對LQG中涉及的參數矩陣的不同取值進行了仿真分析,在教學中實現了把抽象現代控制理論知識具體化和形象化,加深了學生對相關概念的理解,提高了學生應用Matlab解決控制問題的能力.
[1]俞立.現代控制理論[M].清華大學出版社,2007.
[2]Gawronski W.Modeling and Control of Antennas and Telescopes[M].Netherlands:Springer,2008.
[3]Zhang G,Li P.Augmented LQG Method for Optimal Control of Ship Shaft-Generator[J].Journal of Convergence Information Technology,2013,8(1):362-372.
[4]Minh L D,Ha C.Modeling and Control of Quadrotor MAV using Vision-based Measurement[C].International Forum on Strategic Technology,2010:70-75.
[5]劉海生.Simulik在汽車主動懸架LQG控制仿真中的應用[J].機械設計與制造,2008(8):106-107.
[6]Cai G,Chen B M,Dong X,et al.Design and Implementation of a Robust and Nonlinear Flight Control System for an Unmanned Helicopter[J].Mechatronics,2011,21(5):803-820.
[7]鄭大鐘.線性系統理論[M].北京:清華大學出版社,2012.
Teaching Linear Quadratic Gaussian Control Based on Matlab——A Case Study of the Stability Control of a Rotor Flying Robot
CHEN Yang,WU Chun-fu,MA Gui-fang
(1.School of Mechanical and Electrical Engineering,Longyan University,Longyan 364000,Fujian,China)
The velocity tracking control of the rotor flying robot based on the Linear quadratic Gaussian(LQG) technique was taken as an example which was programmed and simulated in MATLAB.The abstract linear quadratic Gaussian control problem was specific,and the parameter matrix of the cost function which will influence the system's control response performance was analyzed.The processing of the modeling and simulation can help students to understand and master the linear quadratic Gaussian control theory.
linear quadratic Gaussian;rotor flying robot;computer-aid instruction
G642.0
A
1007-5348(2016)12-0078-06
(責任編輯:邵曉軍)
2016-07-06
福建省中青年教師教育科研項目(JA15492);龍巖學院2014年教改項目(2014JY38).
陳陽(1985-),男,福建龍巖人,龍巖學院機電工程學院講師;研究方向:飛行機器人導航制導與控制.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
