液壓舵機(jī)與操舵裝置控制系統(tǒng)接口分析
2016-03-10 01:22:23蔣曉亮鄭天祥
江蘇船舶
2016年6期
王 榮,蔣曉亮,鄭天祥
(上海船舶研究設(shè)計(jì)院,上海 201203)
液壓舵機(jī)與操舵裝置控制系統(tǒng)接口分析
王 榮,蔣曉亮,鄭天祥
(上海船舶研究設(shè)計(jì)院,上海 201203)
在船舶航行中,一般采用自動(dòng)舵、手動(dòng)操舵(隨動(dòng)FU和非隨動(dòng)NFU)和應(yīng)急操舵3種操舵方式來操控舵機(jī)。從船舶電氣設(shè)計(jì)工作角度出發(fā),分析船舶上選用閥控型和泵控型電液舵機(jī)時(shí),與操舵控制系統(tǒng)連接時(shí)在接口信號(hào)上的差異,對(duì)設(shè)備選型和電氣系統(tǒng)設(shè)計(jì)有幫助。
液壓舵機(jī);操舵系統(tǒng);系統(tǒng)接口
0 引言
操舵系統(tǒng)是船舶的一個(gè)重要控制系統(tǒng),其性能的好壞直接影響著船舶航行的操縱性、經(jīng)濟(jì)性和安全性。舵機(jī)和操舵裝置控制系統(tǒng)有著操縱和被操縱的關(guān)系,他們的接口就像工作中的一種良好合作關(guān)系,也是整個(gè)航行線路高效、安全的保障。由于不同種類舵機(jī)的工作原理不同,它與自動(dòng)舵的接口也會(huì)有差異,因而這個(gè)問題在系統(tǒng)設(shè)計(jì)和設(shè)備選型中給設(shè)計(jì)人員帶來了困惑。
1 舵設(shè)備的組成及作用
舵設(shè)備主要有舵角指示器、操舵裝置、傳動(dòng)裝置、舵機(jī)、轉(zhuǎn)舵裝置、舵組成,其組成簡(jiǎn)圖見圖1。
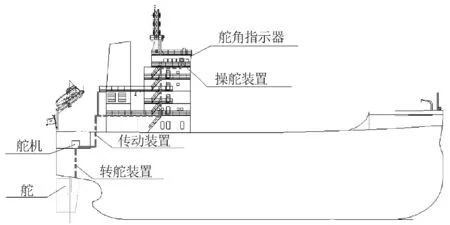
圖1 舵設(shè)備簡(jiǎn)圖
圖1中舵設(shè)備的各部件布置和作用如下。
(1) 操舵裝置控制系統(tǒng)就是舵工或駕駛員操舵用的手柄或手輪,一般會(huì)配置專門的操舵臺(tái),可以和駕控臺(tái)組合一起,也可以獨(dú)立地放在駕駛室內(nèi)。在主操舵臺(tái)的視線需要左右各60°視角。對(duì)于一人橋樓的船舶,在左、右兩翼臺(tái)需要配置NFU手柄。
(2)舵角指示器是反饋舵葉實(shí)際轉(zhuǎn)動(dòng)角度的儀表,駕駛員在駕駛室能實(shí)時(shí)了解舵的實(shí)際位置。……
登錄APP查看全文
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
