抽水蓄能機組連續盤車相位識別方法研究
2016-03-23 00:47:36楊夢起周尚謀中國南方電網有限責任公司調峰調頻發電公司廣州50000廣東工業大學廣州50006
中國農村水利水電 2016年1期
彭 鋮, 楊夢起, 周尚謀(.中國南方電網有限責任公司調峰調頻發電公司,廣州 50000;.廣東工業大學,廣州 50006)
0 引 言
抽水蓄能機組的軸線測量、分析和調整是機組檢修中最為關鍵的工序。盤車時間的長短將直接關系到整個安裝檢修的直線工期控制,盤車質量的好壞對機組的運行狀況也有著重要的影響[1]。目前我國絕大多數水輪發電機組,如三峽左岸電站700 MW常規水電機組,廣蓄二期300 MW抽水蓄能機組,其軸線調整都采用傳統盤車人工等角測量。傳統的等角盤車人工讀數方法存在不可克服的失真弊病,如:測數不準,無法一步調整到位,造成反復、無效勞動多;勞動強度大,工作效率低;現場布置繁雜,安全生產與勞動質量存在一定問題[2,3]。因此,水電機組軸線測量調整技術必將朝著智能化、自動化方向發展,以減少人工測量誤差,得到真實有效的盤車數據,這也成為提高機組軸線調整技術的突破口[4-7]。
抽水蓄能機組連續盤車系統就是針對上述問題開發出來的。首先,通過在盤車裝置上增加傳感系統,使盤車過程變為連續過程,被測點數不受限制,也不需要停留在被測部位,這樣在大大節省盤車工序時間的同時,還可顯著提高測量精度。其次,通過在旋轉軸上沿圓周等距離布置若干光帶紙,然后配合光電傳感器與測量擺度的渦流傳感器同步采樣就可以減少轉速不均勻所帶來的誤差,解決測點的軸位問題。
1 連續盤車系統體系
結合國內外抽水蓄能機組軸線調整的現狀及趨勢,綜合考慮產業化發展需求,本系統采用的方案如圖1所示。
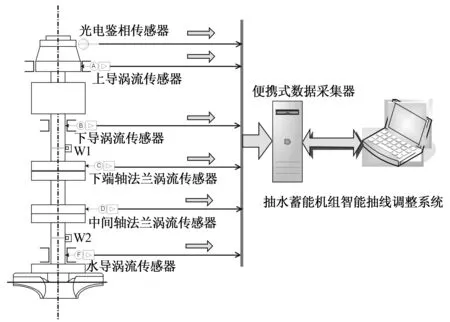
圖1 抽水蓄能機組智能軸線調整系統Fig.1 Intelligent axis adjustment system in pumped storage units
該盤車系統主要包括以下內容。①盤車動力系統:出于成本及項目要求,采用的是人工盤車,盤車過程都不能保證大軸轉速勻速,因此測點軸號間的相位并不是等角。因此,需要一種相位鑒別技術來確定采樣點的相位。另外初始相位如何確定也一直是影響連續盤車系統一個重要關鍵因素。②傳感器標定系統:對盤車前各通道傳感器進行標定。③數據采樣系統:采用多通道獨立并行方式進行采樣。④相位識別系統:由于大軸轉速的不均勻,導致測點軸號間的相位并不是等角,所以需要采用相位識別技術對初始相位及采樣點相位進行識別和標記。⑤數據濾波系統:因為抽水蓄能機組所處環境可能導致采樣信號中混有雜波信號,而盤車時間一般較長(3 min左右1圈),頻率較低,所以采用FIR低通數字濾波。⑥正弦擬合系統:盤車的擺度曲線理論上應該是一條正弦曲線,因此采用進化算法獲取擺度正弦曲線的3個參數,即擺度幅值、擺度初相位和擺度直流分量[8,9]。
2 相位識別技術
2.1 初始相位識別技術
由于該項目采用傳統人工盤車方式,采樣點非常多且不能保證轉角均勻,為計算被測部位最大擺度方位角,需要一種相位鑒別技術來確定采樣點的相位。所以初始相位如何確定是影響抽水蓄能機組連續盤車系統一個重要關鍵因素。首先,在旋轉軸上沿圓周等距離布置若干光帶紙,(參見圖2,為滿足精度要求建議采用8或16條光帶,這里采用的是8條光帶),建議在實際應用中按精度要求增加光帶紙的數量,安裝光帶紙時應保證盡可能均勻地沿軸頸圓周上分布,由此可減小相位角測量的誤差。然后在布置的光帶紙中任選一條,在其鄰近處多貼一條相同的光帶紙,如此一來就可以巧妙地判斷測點的初始相位。圖3是初始相位識別方法的原理流程方案圖。
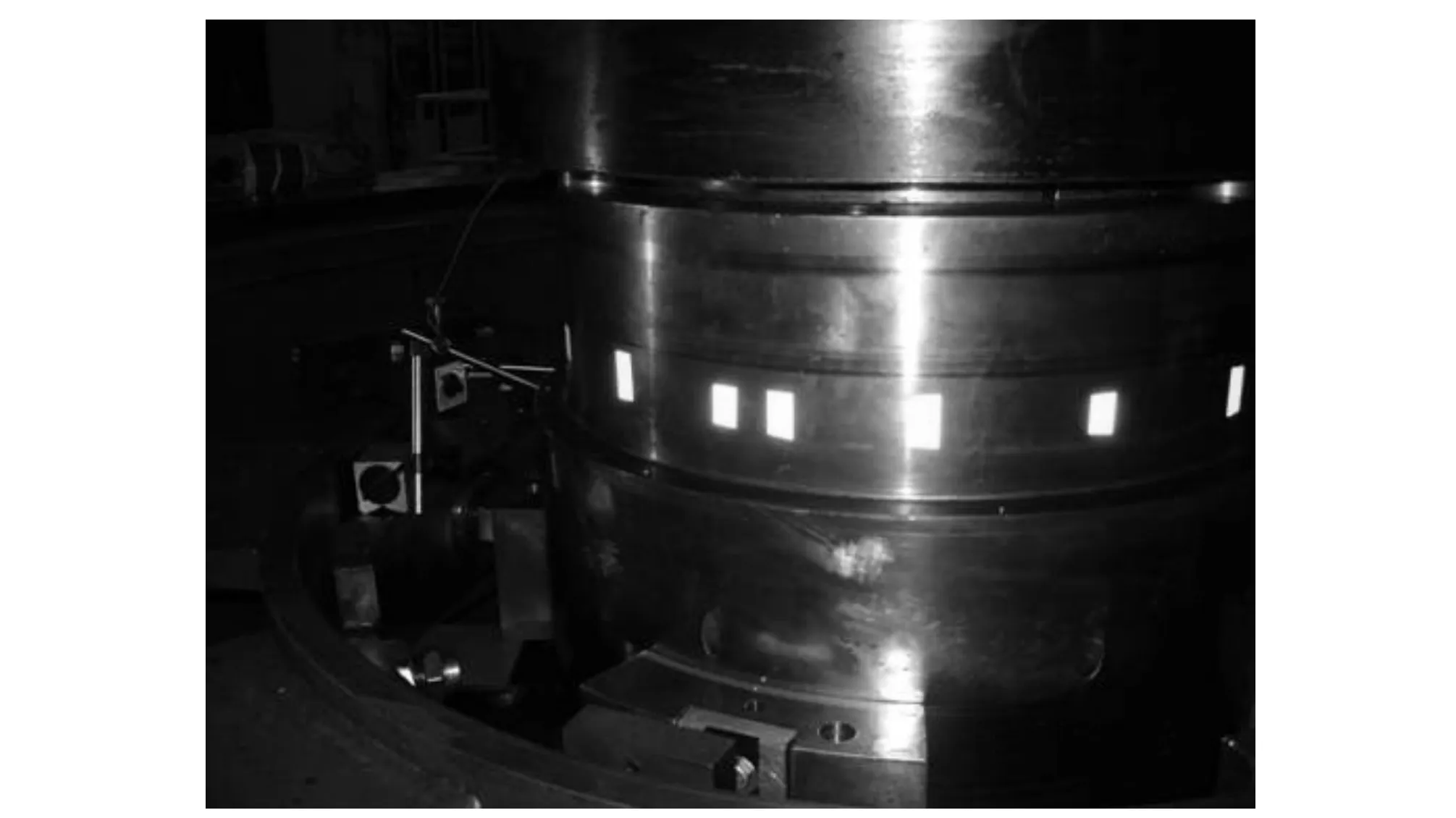
圖2 光帶紙布置示意圖Fig.2 Light paper layout diagram
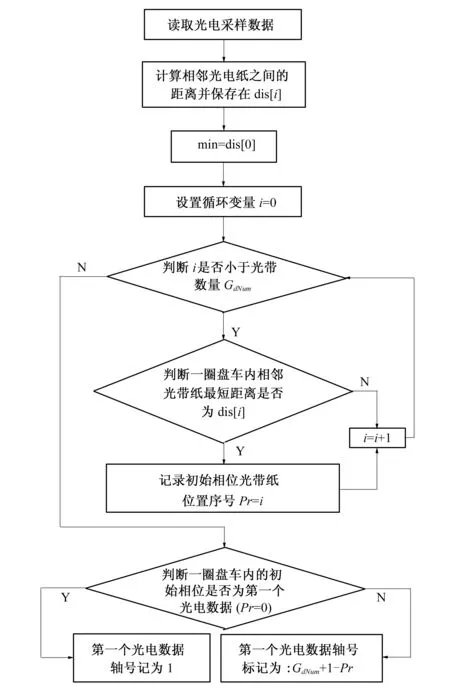
圖3 初始相位識別原理圖Fig.3 The principle diagram of the initial phase identification
初始相位識別是擺度計算的一個關鍵基礎,在希望將某光帶前邊緣視為初始相位的相鄰之處增加一條相同光帶,這樣就可以區別開其他光帶。算法關鍵在于如何從光電采樣數據中找出初始相位。圖3初始相位識別原理的兩個關鍵點在于:①從盤車一個周期內的光電采樣數據中計算所有相鄰兩條光帶的距離(實際上是指相鄰兩條光帶間的時間采樣點數),從而找出其中最短的距離,便可以確定相鄰兩條光帶為最短距離的前一條光帶的前邊緣為初始相位。②計算第一條光帶對應軸號的序號,這里有兩種情況需要考慮:一種情況是盤車的初始相位恰好為第一個光電數據,顯然此時的軸號為1;另外一種情況是初始相位并不是第一個光電數據。
2.2 相位轉換技術
因為是人工盤車方式,所以不能保證轉角均勻,為了將不均勻的采樣點圖轉換至均勻的相位圖,需要利用在旋轉軸上沿圓周等距離布置的光帶紙(如圖2),配合光電傳感器與測量擺度的渦流傳感器同步采樣。這樣一來雖然軸速不能保證絕對均勻,但是由于光帶點比較密集,所以把光帶點之間的擺度采樣點做近似等距離處理并不會造成很大誤差。圖4是相位轉換方法的原理流程圖。其中相位轉換公式如下:
(1)
式中:i為第i個擺度采樣點;Xi為第i個擺度采樣點對應的相位,(°);GdNum為布置的光帶數目;j為第j個軸號;Lj為第j個軸號的光帶位置數據(即對應的采樣點數據)。
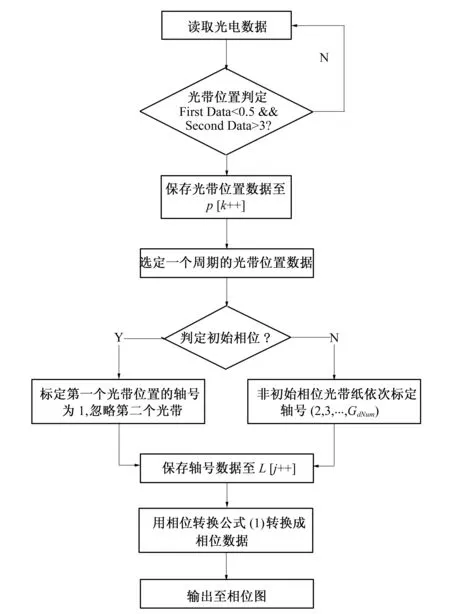
圖4 相位轉換原理圖Fig.4 The principle diagram of the phase transformation
3 應用案例
本試驗以某抽水蓄能電廠盤車采樣數據為例,數據包括由渦流傳感器測量的上導、下導、法蘭處的擺度采樣數據(水導處沒有加裝傳感器)以及由光電傳感器測量的相位數據。首先,由于采樣數據可能混有許多干擾信號,先對數據進行濾波處理。然后,將濾波后的數據取出一個周期進行相位轉換,把濾波后的數據(大軸轉速不均勻)轉換到均勻的相位圖中。圖5是原始采樣4000點數據界面,圖6是將濾波后信號裝換至相位圖界面。
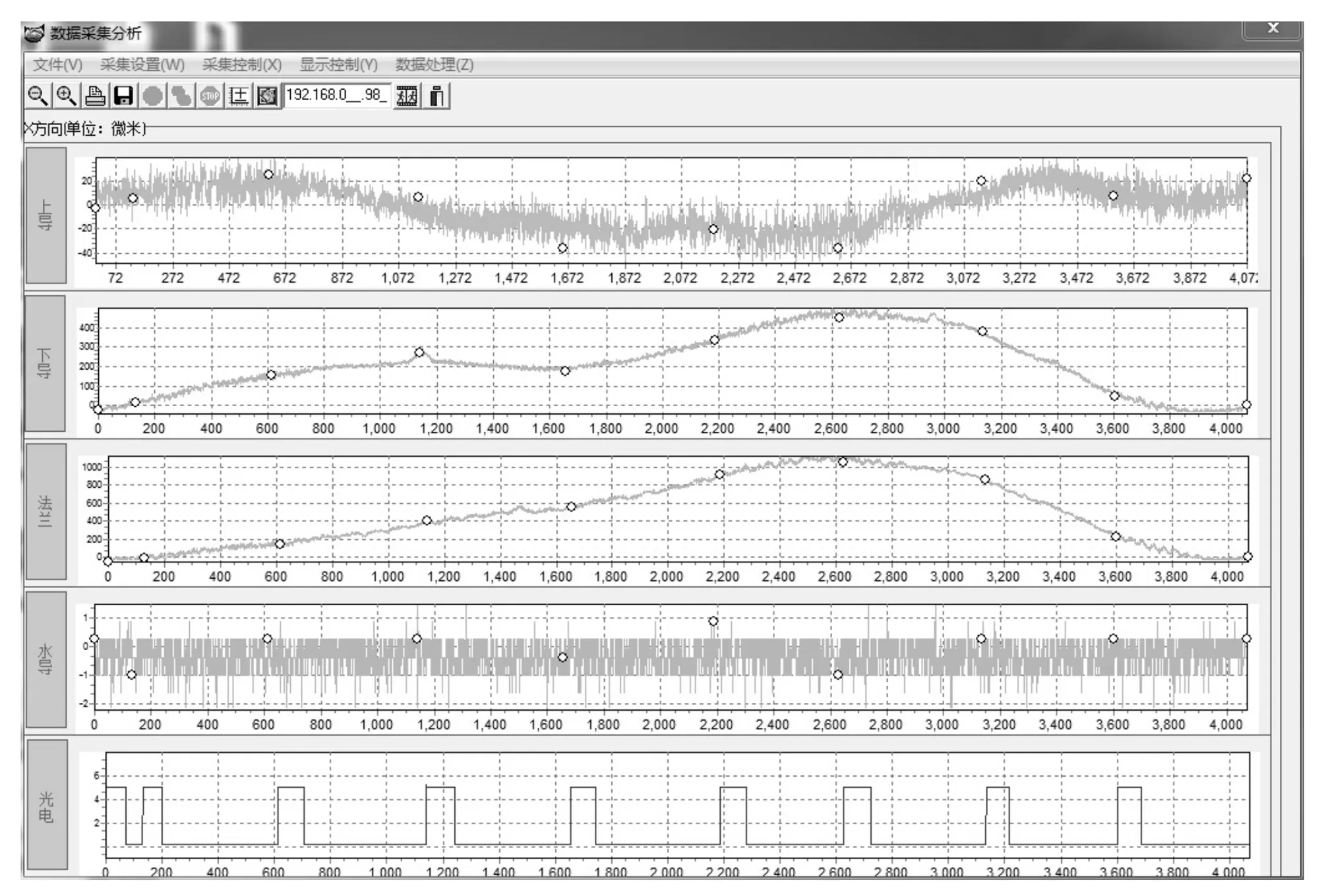
圖5 連續采樣界面Fig.5 Continuous sampling interface
圖5光電數據中距離最近的2個上升沿是初始相位,其他光電數據上升沿間的采樣點數不同是因為連續盤車時大軸轉速不均勻造成的。因此,我們利用相位轉換技術,流程圖如圖4,就能將不均勻的采樣點圖轉換成均勻的相位圖,得到如圖6的界面。
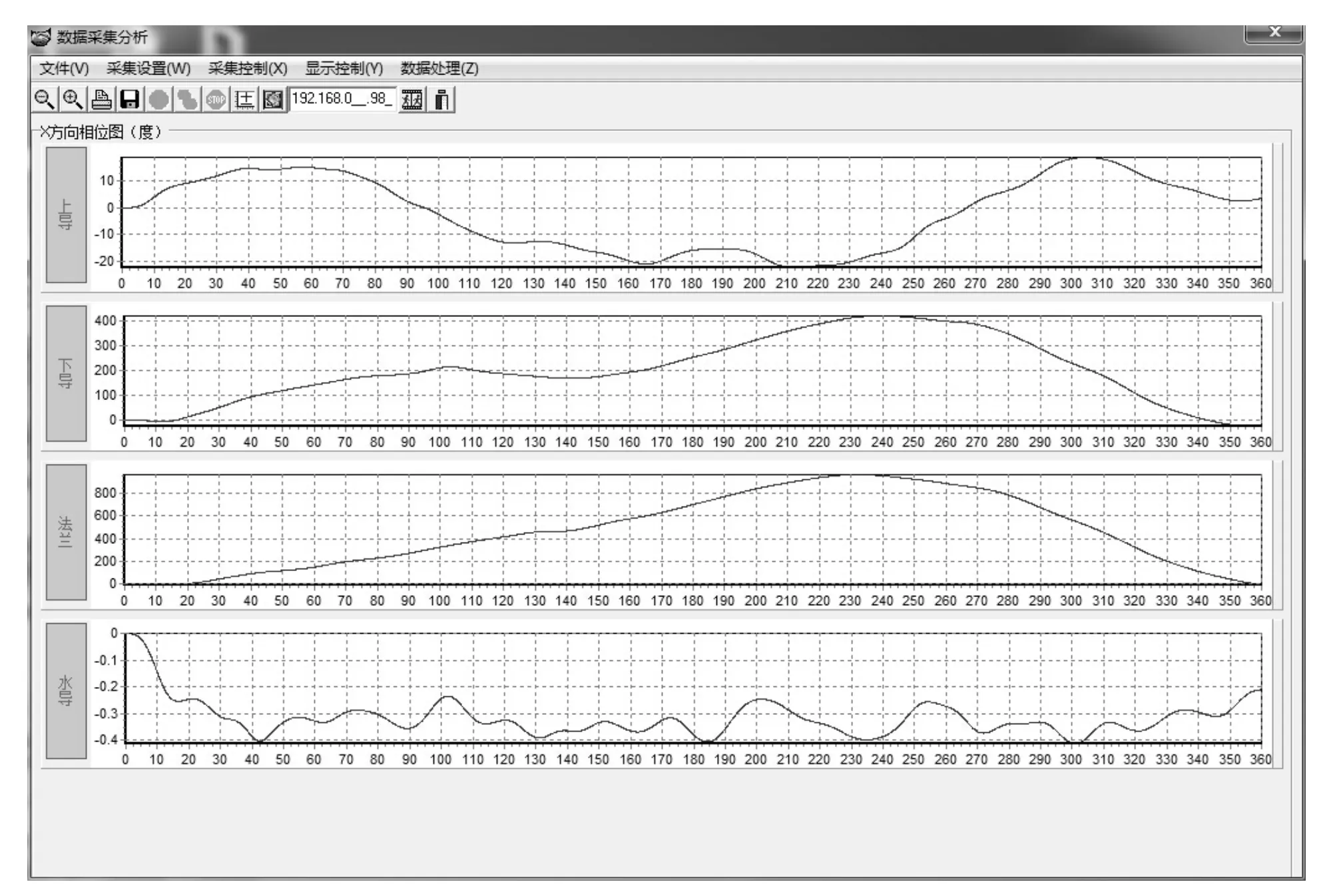
圖6 相位圖界面Fig.6 The phase diagram interface
4 結 語
本文簡單介紹了抽水蓄能機組連續盤車系統,著重闡述了該連續盤車系統的相位識別技術。通過渦流傳感器配合光電傳感器同步采集信號,運用初始相位識別和相位轉換技術,解決了連續盤車相位識別問題。減少了系統誤差,提高了盤車的準確性。由上述成功案例說明該解決方案可行有效,有良好的實用及推廣價值。
□
[1] 王勝超. 簡析水輪發電機組盤車[J]. 電工文摘,2012,(4):54-58.
[2] 徐 剛. 任意轉角盤車新方法研究[J]. 東北電力技術,1998,(10):18-21.
[3] 徐 剛,劉 健. 龍灘1號機組盤車數據處理的優化[J]. 紅水河,2008(,2):72-74.
[4] 孟安波,劉秀良,閔占奎,等. 水電機組全自動智能盤車系統設計與應用[J]. 大電機技術,2012,(1):31-33, 64.
[5] 孟安波,劉秀良,徐海波,等. 水電機組智能盤車系統關鍵技術探討與實踐[J]. 自動化與信息工程,2011(2):36-38.
[6] 史恩澤,齊經緯. 太平灣電廠多點任意角盤車軟件開發及功能介紹[J]. 水電站機電技術,2009,(5):22-24.
[7] 劉潤根,楊 虹,李 輝,等. 水電站機組智能盤車系統設計與應用[J]. 中國水利水電科學研究院學報,2015,(1):74-80.
[8] 孟安波,徐海波. 基于遺傳算法的水電機組盤車數據處理方法研究[J]. 水力發電,2011,(10):61-62.
[9] 彭 麗. 粒子群算法在曲線擬合中的應用[J]. 軟件導刊,2011,(2):55-56.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
