基于Abaqus的缺口圓盤刀開溝作業有限元仿真及分析
2016-03-23 06:10:09高富強邱立春
農機化研究 2016年9期
關鍵詞:有限元法
齊 鵬,高富強,邱立春
(沈陽農業大學 工程學院,沈陽 110161)
?
基于Abaqus的缺口圓盤刀開溝作業有限元仿真及分析
齊鵬,高富強,邱立春
(沈陽農業大學 工程學院,沈陽110161)
摘要:為分析免耕播種機破茬開溝部件開溝作業時圓盤刀與土壤之間的相互作用情況,在Abaqus有限元分析軟件中建立了圓盤刀——土壤侵徹的三維動態有限元模型,在Explicit動態顯示模塊下進行仿真試驗分析。搭建了基于室內土槽的圓盤刀牽引平臺,通過土槽試驗對有限元模型的正確性、有效性進行驗證,結果表明:該有限元模型能準確模擬圓盤刀在土壤上進行開肥溝作業的過程。選取機組前進速度、圓盤刀入土深度和圓盤刀刀面與前進方向之間偏角等作為試驗因素進行基于上述有限元仿真的正交試驗,得到各因素及其一階交互作用對模型中肥溝深度和寬度的影響規律。同時得到:在機組前進速度為1.67 m/s、圓盤刀入土深度為12cm、圓盤刀面偏角為6°時,破茬開溝部件所開肥溝質量最佳。
關鍵詞:免耕播種機;缺口圓盤刀;有限元法
0引言
免耕播種是指在未經耕整覆蓋有秸稈殘茬的土壤上直接進行播種作業[1]。與傳統播種方式相比,最大的不同在于播種機前部配置有各式各樣的破茬開溝部件,主要作用是切斷秸稈殘茬并開出良好的肥溝便于排肥同時為接下來的播種作業做擾土準備。近年來,隨著國內材料工藝和金屬熱處理技術的日臻成熟,各式破茬開溝機構的強度及可靠性得到很大提高,完全能夠滿足秋季還田地的破茬作業要求。而隨著改良土壤、增加土地營養的施加玉米口肥作業的廣泛推廣,免耕播種作業時開肥溝作業日益受到重視。開肥溝作業受機組前進速度、部件入土深度和破茬開溝部件偏角等諸多因素的影響,在田間作業時經常出現所開肥溝過窄、過淺,肥溝直線度、均勻度不良等問題,從而使得化肥不能準確均勻地施放到農藝所要求的土層位置。按農藝要求,肥溝應盡可能做到深和寬,一般來講,破茬開溝器應切開表土開出一條3~8cm寬、8~12cm深的肥溝或種溝預開溝[2~3]。
本文旨在通過對免耕播種機缺口破茬開溝圓盤刀進行開肥溝作業的正交試驗,得出機組前進速度、部件入土深度和破茬開溝部件偏角等相關因素對肥溝質量的影響及其最佳作業參數組合。傳統方法研究此類入土部件與土壤的相互作用主要依靠土槽試驗,但使用土槽進行多因素多水平的正交試驗研究時,因其工作量大、耗時耗力,有時需加工多個不同試驗機具且誤差及偶然因素較多使得基于土槽的正交試驗難以進行[4-5]。
基于上述原因,本文采用將有限元模擬試驗與土槽驗證試驗相結合的方法得到所需的作業參數。即先通過Abaqus有限元分析軟件完成開肥溝部件模型與土壤模型的建立并對其裝配體進行部分因素水平下的有限元仿真試驗,得到相關試驗數據;再通過對應因素水平的土槽試驗對之前有限元試驗結果進行驗證,確定有限元試驗結果可靠。在所建模型準確、約束條件合理的情況下再進行所有因素水平下的有限元軟件內的正交試驗,以得出各因素對圓盤刀所開肥溝深度與寬度的影響大小的排序及開溝作業中最佳作業參數組合。
1仿真試驗材料與方法
1.1 圓盤刀—土壤有限元模型
由于Abaqus軟件自帶的圖形處理功能不夠完善,操作難度相對較大,故應用SolidWorks三維建模軟件,以國內某型免耕播種機缺口破茬開溝圓盤刀(見圖1)為藍本建立圓盤刀部件模型。其圓盤刀外徑435mm,圓盤厚5.5mm,刀刃厚2.5mm;圓盤上沿圓周均勻分布13個凸齒,凸齒呈圓角梯形,上底5cm,相鄰齒間腰呈圓弧均勻過度。為方便劃分網格,將不影響動力學有限元分析的中心軸承口及6個螺紋孔省略,將SolidWorks中建成的圓盤刀模型保存成IGS格式文件并導入Abaqus下Explicit模塊中。在Abaqus中定義材料為65Mn,抗拉強度為735MPa,屈服強度為430MPa,密度7 810kg/m3,泊松比為0.3,彈性模量為210GPa。創建65Mn截面并指派給導入后的圓盤刀部件[6-9]。
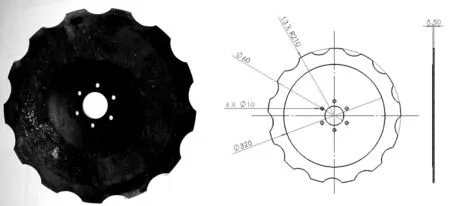
圖1 免耕播種機缺口圓盤刀
土壤模型直接在Abaqus中建立,為以XY平面對稱的300mm×500mm×400mm的長方體實體[9]。土壤模擬選用遼寧省農業機械化研究所土槽內土壤,土質為黃黏土,土壤模型采用Druker-Prager本構模型。其剪切準則確定為線性類型,硬化行為確定為剪切類型。定義材料屬性參數如表1所示[10]。土壤模型參數值以吉林大學佟金教授相關論文參數為模板,密度、摩擦角及含水率參數為本實驗室內測出;創建土壤截面并指派給土壤部件。
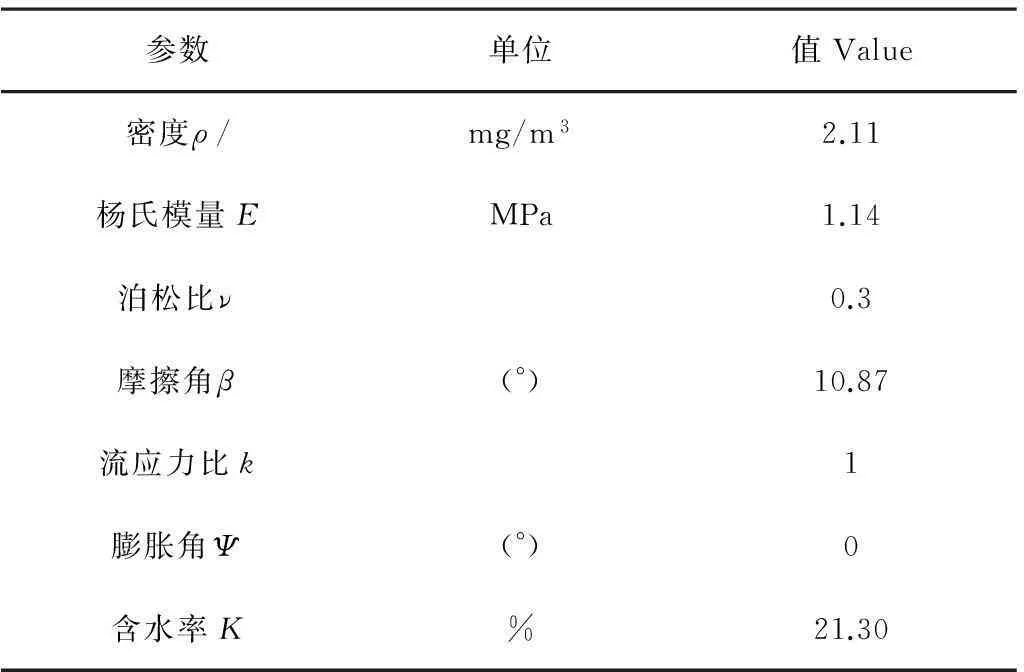
表1 有限元模型中的土壤參數
將兩部件劃分網格并裝配成仿真試驗模型。使圓盤刀與土壤外表面有一定距離,圓盤最下端距離土壤上表面垂直距離為8、10、12cm共3個水平,其值代表著破茬開溝部件開肥溝作業時的入土深度。圓盤平面可以與XY平面成0°、3°、6°角共3個水平,其值大小反映了破茬開溝部件開溝平面對機組前進方向的偏轉程度。當圓盤平面與XY平面存在夾角即試驗中模型位置偏角取3°和6°這兩個水平時,需對圓盤刀添加額外約束以使其不能在有限元分析過程中隨意轉動導致結果失真。
1.2 圓盤刀—土壤的動力學仿真
進行Abaqus有限元分析模塊的操作,包括分析步、接觸、預定義場與載荷等選項卡的參數確定與設置。
創建顯示動力學分析步,時間長度確定為0.5s,時間增量確定為0.001s,創建相應的場輸出與歷程輸出對象。
創建相互作用為接觸,其中接觸屬性設定為切向滿足懲罰函數的摩擦,確定摩擦因數為0.6;法向為硬接觸即當接觸面之間的接觸壓力變為0或者負值時,2個接觸面分離,約束被移開[11]。由于圓盤刀材料強度遠高于土壤的強度,故該模型中對圓盤刀創建剛體約束;在土壤長方體下表面創建邊界條件為完全固定,即限制底面的全部6個自由度,土壤模型上表面不施加任何約束。
在預定義場及邊界條件下同時創建圓盤具有X正方向初速度,速度作用點為圓盤剛體的中心,該中心命名為RP,速度取值為1.67、2.22、2.78m/s等3種情況,其值代表著正交試驗中機組作業的前進速度。這一因素下共有1.67、2.22、2.78m/s等3個水平[12-16]。完成上述全部步驟后創建作業,提交分析。
1.3 仿真試驗數據收集
每組有限元分析試驗完成后,在Abaqus軟件可視化模塊下都會得到20~40張數量不等的應力云圖用來顯示該模型的仿真結果,圖2顯示的是模型在分析工作完成前后的形態對比。
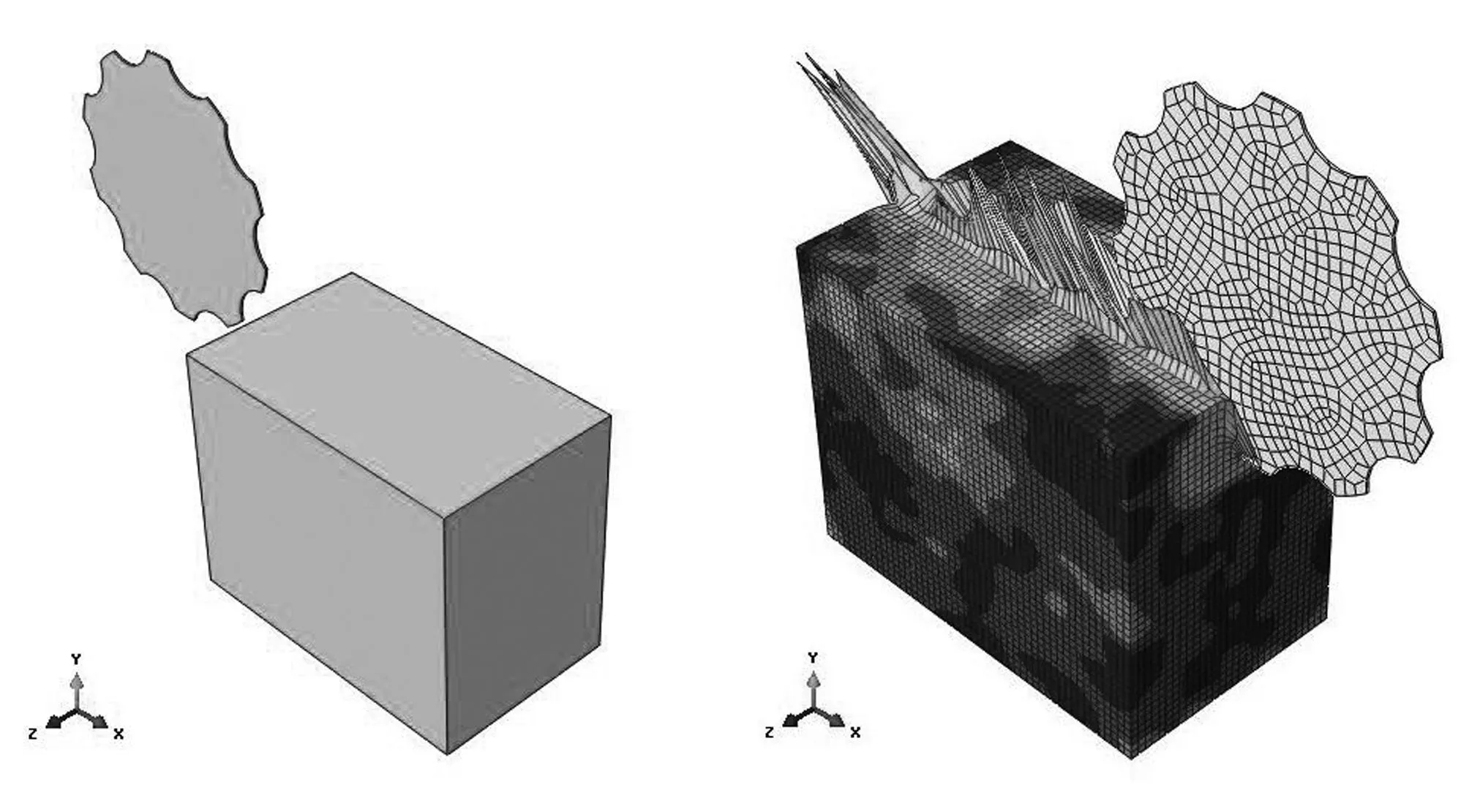
圖2 圓盤刀與土壤模型仿真結果示意圖
在可視化窗口下可查看有限元模型的變形云圖。選取每組試驗完成后所得云圖中的最后一幀云圖(最終變形狀態)進行溝槽深度、寬度的圖上測量,可利用Abaqus軟件中的查詢距離功能測量所需數據。為方便測量需要將圓盤刀模型隱藏,在測量溝槽深度、寬度時需分別作相應的切片處理。
1)溝槽深度測量:對云圖進行Z平面下的切片處理,以XY平面本身為中心將模型進行等分,可選取任一部分測量,此時溝槽最深點能完全暴露出來方便測量。由于所得切片的溝深在X方向上有一定起伏,故對土壤模型中溝槽部分全長進行沿X方向的3等分,分別測出3個等分點處的溝深,溝槽深度則記為3個深度的算術平均值。
2)溝槽寬度測量:對云圖進行Y平面下的切片處理,以與XZ平面平行且沿Y平面負方向平移9.5cm的平面為切刀將模型分成上下兩部分,保留下面部分。此時溝槽寬度為地表以下9.5cm的寬度,該深度為施肥的良好深度,故統一選取該深度的溝寬作為數據采集位置。所得切片溝槽寬度均較均勻,選取土壤模型中溝槽部分全長的中心為測點,測量該位置的溝寬作為該組試驗的溝槽寬度。
按照上述方法完成各組有限元仿真試驗的數據收集。
1.4 仿真試驗結果
在Abaqus顯示動力學模塊中對上述模型(包含變更作業條后重新裝配的模型)分別進行機組前進速度為1.67m/s、入土深度8cm、圓盤刀面偏角0°,機組前進速度2.22m/s、入土深度10cm、圓盤刀面偏角3°;機組前進速度為2.78m/s,入土深度12cm、圓盤刀面偏角6°等3種因素水平的有限元仿真試驗,各試驗分別記為試驗1、試驗2、試驗3。每組試驗進行2次重復試驗,所得試驗指標結果為組內各試驗數據的平均值。為方便圖上測量,對各試驗最后一幀云圖進行剖視、特征線顯示、背景色變更等處理,所得云圖如圖3所示。
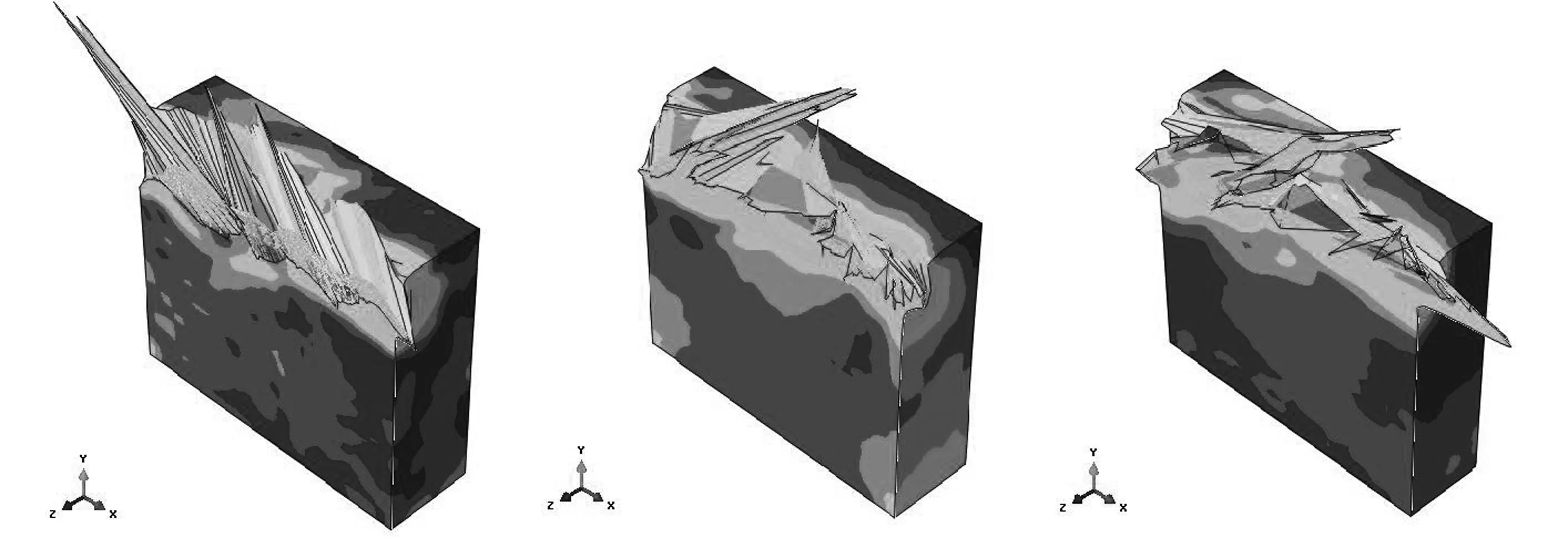
(a) 試驗1 (b) 試驗2 (c) 試驗3
按照上述試驗數據收集方法,對所做共3組6次試驗進行數據測量、收集和平均值處理。得到了3組試驗中所開溝槽寬度及深度數據如表2所示。
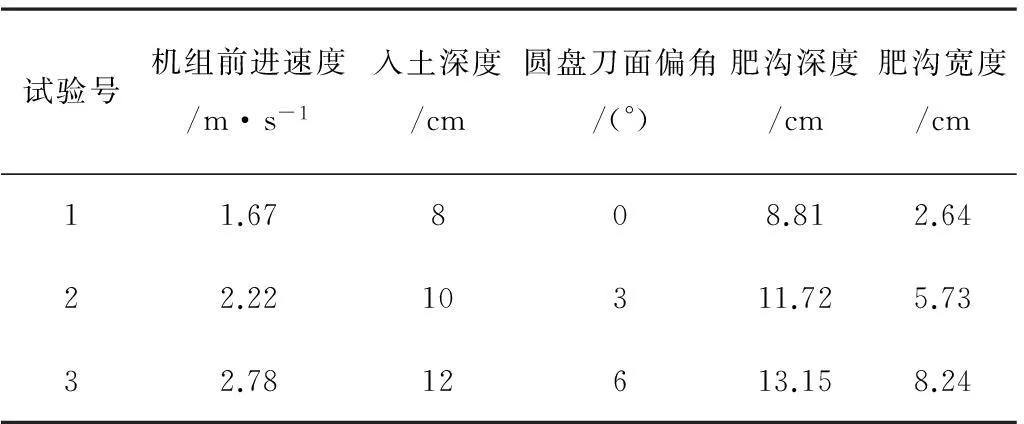
表2 Abaqus部分試驗數據表
2土槽驗證試驗
為了驗證所建立的有限元模型的準確性,選取溝槽寬度、深度兩者為驗證參數進行室內土槽試驗。試驗在遼寧省農業機械化研究所室內土槽平臺進行,土槽車作為牽引力來源提供試驗所需的3種速度,缺口破茬開溝機構通過調整懸掛位置調節其入土深度及圓盤刀面偏角。
分別對有限元仿真試驗中的3組試驗進行同等因素水平下的土槽試驗,試驗號一一對應。測量并采集肥溝深度、寬度等試驗數據進行比較。溝寬與溝深的數據測點及測量方法參照有限元試驗中的數據采集方式,每組土槽試驗進行3次重復試驗,所得試驗指標結果為組內各試驗數據的平均值。土槽試驗數據如表3所示。
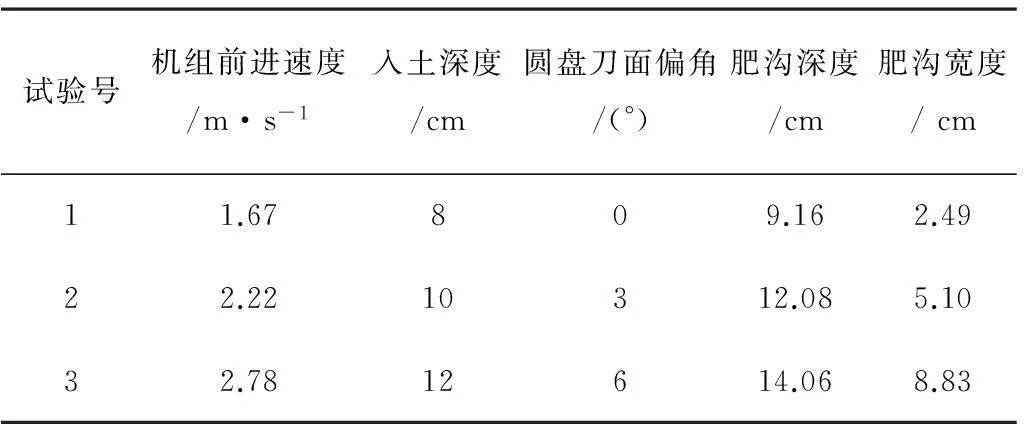
表3 土槽部分試驗數據表
將土槽試驗數據與有限元仿真試驗數據相比較,計算相對誤差。計算結果表明:試驗1中仿真試驗肥溝深度的相對誤差為3.82%,肥溝寬度的相對誤差為6.02%;試驗2中深度相對誤差為2.98%,寬度相對誤差為2.20%;試驗3中深度相對誤差為6.47%,寬度相對誤差為6.68%。3組試驗中兩個評價指標的仿真值與實測值相對誤差均小于7%,數據波動誤差較小,波動情況與自然規律相符,證明本研究所采用的建模及仿真方法準確可靠,可在該仿真模型下進行全面正交試驗研究。
3正交試驗及結果分析
3.1 正交試驗
由于有限元仿真試驗結果可靠,故在Abaqus中進行全部正交試驗。在正交表L18(37)(見表4)下安排3因素3水平有交互的正交試驗。其中,試驗1及試驗9的試驗數據沿用之有限元仿真試驗中的試驗1及試驗3的結果。

表4 正交試驗表及數據
K1~K3、k1~k3、R中的數據依次為肥溝深度和肥溝寬度。
3.2 試驗結果分析
因素影響的主次順序的確定主要依據表4中極差R數值的大小進行排列。由農藝常識知,在合理范圍內,肥溝的溝槽深度與寬度均為數值越大越好,故各因素對二者的影響大小的順序均為R值由大到小排列。
由表4可得排序結果如下:①各因素對肥溝深度的影響大小的順序為入土深度>圓盤刀面偏角>入土深度×圓盤刀面偏角>空列>機組前進速度>機組前進速度×入土深度>機組前進速度×圓盤刀面偏角;②各因素對肥溝寬度的影響大小的順序為圓盤刀面偏角>機組前進速度×圓盤刀面偏角>入土深度>機組前進速度×入土深度>入土深度×圓盤刀面偏角>空列>機組前進速度。
此外,在排除交互作用影響只考慮現有因素各水平的情況下可得對于肥溝深度、肥溝寬度的優方案均為A1B3C3,即機組前進速度為1.67 m/s、入土深度為12cm、圓盤刀面偏角為6°時,破茬開溝部件所開肥溝效果最為理想。
4結論
1)利用Abaqus有限元分析軟件可準確模擬免耕播種機破茬開溝缺口圓盤刀與土壤間的相互作用情況;與傳統的土槽試驗、田間試驗相比節省了大量的人力、物力和財力。
2)由試驗得出了各因素對及其一階交互作用對肥溝深度和寬度的影響大小順序。由此可以看出:入土深度對溝槽深度數值影響最大且與常識相符;需要指出的是,圓盤刀面偏角及其與入土深度的交互作用對肥溝深度影響也很顯著。機組前進速度對溝槽寬度的單獨影響較小;但在與圓盤刀面偏角交互作用下卻對溝槽寬度有顯著作用,僅次于圓盤刀面偏角對溝寬的影響。
3)在各因素既定的水平下,當機組前進速度為1.67m/s、圓盤刀入土深度為12cm、圓盤刀面偏角為6°時,破茬開溝部件所開肥溝最為深和寬,溝槽形態最為理想。由此反映出圓盤入土深度與刀面偏角分別作為肥溝深度與寬度的導向因素,其取值大小直接影響溝槽形態;機組速度作為補充因素,在其取值較小時溝槽的深度與寬度反而較大,針對這種對應關系需要做進一步的研究。
參考文獻:
[1]高煥文,李同盈.保護性耕作技術與機具[M].北京:化學工業出版社,2004.
[2]李寶筏.農業機械學[M]. 北京:中國農業出版社,2003:55-56.
[3]邱立春,紀鳳芳.農業生產技術研究—理論與實踐[M].北京:高等教育出版社,2002.
[4]馬洪亮,高煥文,李洪文.驅動圓盤刀切斷玉米秸稈和根茬的土槽試驗[J].農業機械學報,2007(5):47-50,54.
[5]馬洪亮,高煥文,魏淑艷.驅動缺口圓盤玉米秸稈根茬切斷裝置的研究[J].農業工程學報,2006,22(5):86-89.
[6]周桂霞,張偉,李玉清,等.免耕播種機破茬部件的仿真分析[J].黑龍江八一農墾大學學報,2010,22(4):2-23.
[7]楊帆,李問盈,李洪文,等.免耕播種機缺口圓盤刀有限元靜強度分析[J].農業機械學報,2010,41(6):54-55.
[8]何磊,曹衛彬,李樹峰.基于SolidWorks的破茬開溝犁刀的設計與強度分析[J].安徽農業科學,2011,39(3):1819-1821.
[9]曾德超.機械土壤動力學[M]. 北京:北京科學技術出版社,1995:87-92.
[10]佟金,張智泓,陳東輝.凸齒鎮壓器與土壤相互作用的三維動態有限元分析[J].農業工程學報,2014,30(10):48-58.
[11]夏俊芳,賀小偉,余水生.基于ANSYS/LS-DYNA的螺旋刀輥土壤切削有限元模擬[J].農業工程學報,2013,29(10):34-41.
[12]Abo-Elnor M, Hamilton R, Boyle J T.3D Dynamic analysis of soil-tool interaction using the finite element method[J].J Terramechanics,2003,40(1):51-62.
[13]石亦平,周玉蓉.ABAQUS 有限元分析實例詳解[M]. 北京:機械工業出版社,2006.
[14]費康,張建偉.ABAQUS 在巖土工程中的應用[M]. 北京:中國水利水電出版社,2009:491-494.
[15]朱向榮,王金昌.ABAQUS 軟件中部分土模型簡介及其工程應用[J].巖土力學,2004(11):144-148.
[16]丁峻宏,金先龍,郭毅之.土壤切削大變形的三維數值仿真[J].農業機械學報,2007,48(4):118-121.
[17]GB5262-2008-T農業機械試驗條件測定方法的一般規定[S].
Abstract ID:1003-188X(2016)09-0064-EA
The Finite Element Analysis and Simulation of the Gap Disc Trenching Based on ABAQUS
Qi Peng, Gao Fuqiang , Qiu Lichun
(College of Engineering,Shenyang Agricultural University,Shenyang 110161,China)
Abstract:In order to analysis the interaction between the no-till planter gap- disc and soil, we set up the disc-soil dynamic three-dimensional finite element model on Abaqus and proceed simulation experiment analysis under the its explicit dynamic display module. Established a traction platform based on the indoor soil bin and examined the validity and reliability of finite element model through it. The results show that the finite element model can simulate the process accurately.Forward speed, disc buried depth and angle between the disc surface and advance direction(deflection angle) were selected as three factors of the orthogonal simulation experiment. Explored the effect regularity on the depth and width of the fat groove caused by the factors and the primary reciprocal actions between each factor. At the same time ,it can be seen that the quality of groove is best when it was selected 1.67 m/s as the forward speed, 12 cm as the disc buried depth ,6°as the angle between the disc surface and advance direction.
Key words:no-till planter;gap-disc;finite element analysis
中圖分類號:S223.2+6;S220.3
文獻標識碼:A
文章編號:1003-188X(2016)09-0064-05
作者簡介:齊鵬(1990-),男,遼寧營口人,碩士研究生,(E-mail) 906547981@qq.com。通訊作者:邱立春(1957-),男,遼寧鐵嶺人,教授,博士生導師,(E-mail)qlc@syau.edu.cn。
基金項目:國家自然科學基金項目(51175354)
收稿日期:2015-09-01
猜你喜歡
裝備制造技術(2019年12期)2019-12-25 03:06:04
電測與儀表(2016年15期)2016-04-12 00:30:46
專用汽車(2016年8期)2016-03-01 04:16:43
電機與控制應用(2015年1期)2015-03-01 03:49:16
許昌學院學報(2015年5期)2015-02-28 18:20:26
中國衛生標準管理(2015年17期)2015-01-26 21:05:18
計算物理(2014年1期)2014-03-11 17:00:14
振動、測試與診斷(2014年4期)2014-03-01 01:14:06
無錫職業技術學院學報(2013年3期)2013-03-11 19:01:14
船海工程(2013年6期)2013-03-11 18:57:25
