
淺析航道水深的測量方法
2016-04-23 14:36:17喬朋起
科學與財富 2016年5期
喬朋起
摘 要:船舶的實時運動以及河底的不可見性決定了航道水深測量不同于其它常規測量。本文著重介紹在航道水深測量中的測量方法及所使用的測量儀器。
關鍵詞:航道水深測量;前方交會法;極坐標交會法;GPS后方交會法
引言
航道是指沿海、江河、湖泊、運河內船舶、排筏可以通航的水域。航道由可通航水域、助航設施和水域條件組成。按著形成原因可分為天然航道和人工航道。其中天然航道是指自然形成的江、河、湖、海等水域中的航道,包括水網地區在原有較小通道上拓寬加深的那一部分航道,如廣東的東平水道、小欖水道等。人工航道是指在陸上人工開發的航道,包括人工開辟或開鑿的運河和其他通航渠道,如平原地區開挖的運河,山區、丘陵地區開鑿的溝通水系的越嶺運河,可供船舶航行的排、灌渠道或其他輸水渠道等。
航道要求有以下幾個方面:有足夠的航道深度;有足夠的航道寬度;有適宜的航道轉彎半徑;有合理的航道許可流速以及有符合規定的水上外廓。對于不合乎航道要求的區段應開拓航道和改善航道航行條件的工程,常包括以下幾個方面:①航道疏浚;②航道整治,如山區航道整治、平原航道整治、河口航道整治;③渠化工程及其他通航建筑物;④徑流調節,利用在淺灘上游建造的水庫調節流量,以滿足水庫下游航道水深的要求;⑤絞灘;⑥開挖運河。而這些常常需要航道水深測量。
正文 航道水深測量一般來說有三種方法。
1 前方交會法
該方法是一個二維坐標的施測方法。設有A、B、P三點,其中A、B為已知坐標的點,P為未知點,用儀器測得∠PAB和∠PBA,根據A、B的坐標可求得P點的坐標,這種測定未知點P的平面坐標的方法稱為前方交會法(如圖1)。
此方法需三組儀器共同配合進行水深測量(兩組經緯儀,一組測深儀)。在一岸選取A、B兩個互為通視的已知點作為測站點,分別架設經緯儀并互為后視。船上測量人員根據不同比例尺要求按照船行的距離通過對講機或旗語的方式要求定位,三組儀器同時記錄該點位點的平面位置和水深。即:陸地測量人員利用經緯儀分別記錄船位的α及β角;船間測量人員利用測深儀記錄該點位點的水深。內業處理時通過交會展點及量深,展匯成圖。此種方法應用儀器簡單,只用兩臺經緯儀、一臺測深儀。但是對測區工況條件要求較高,控制點之間要互為通視,而且只適用區段較小的測區,根據經驗雙經緯儀觀測角α及β角度應控制在30°-120°之間范圍,如超出這個范圍,在內業測深點展繪時會影響測點的平面精度。所以測區區段較大,會造成連續搬站的弊端。另外,在測深點定位時不能達到實時同步。運用此種方法外業儀器操作人員數量不低于六人,人工投入大。
2 極坐標交會法
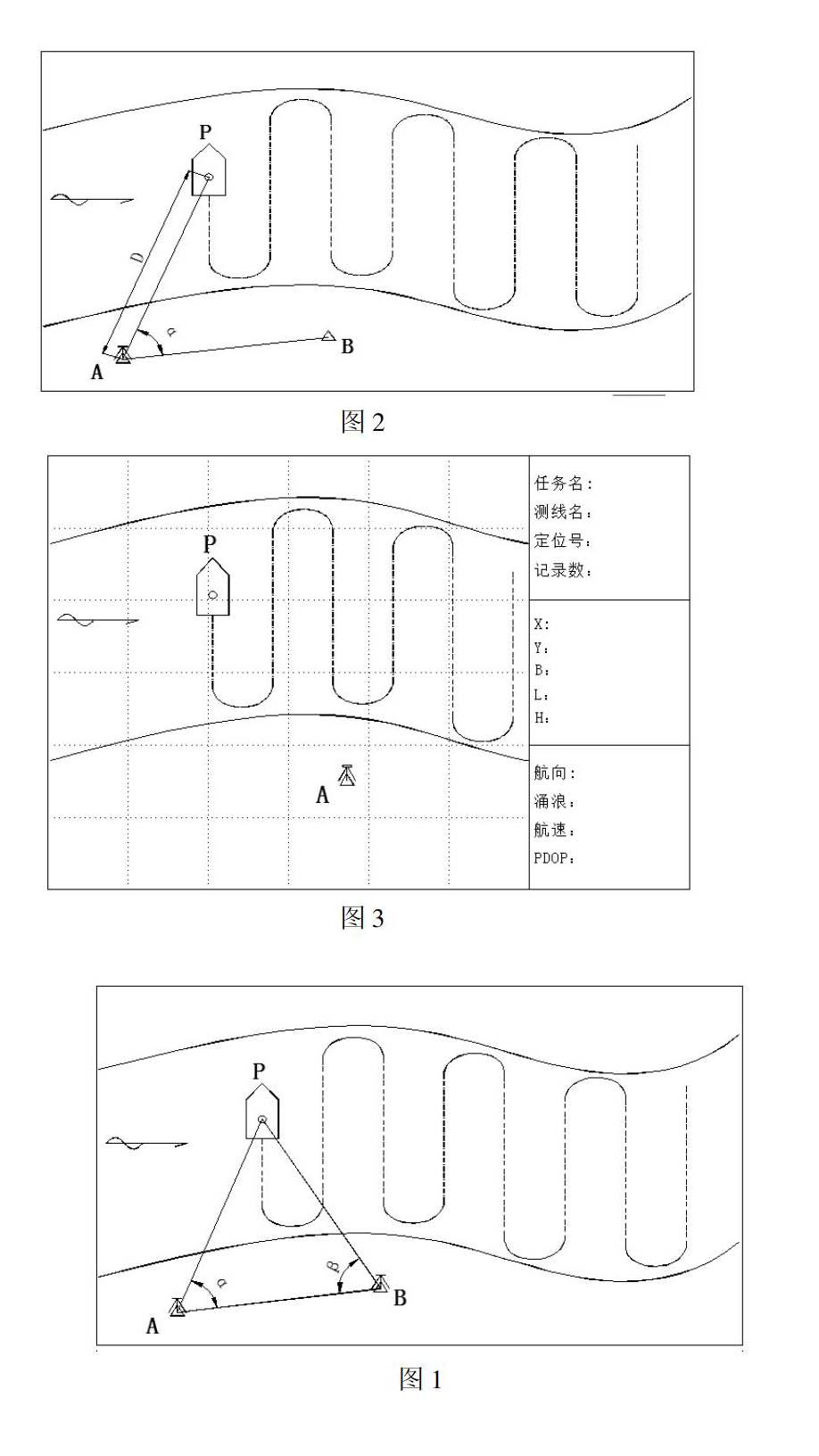
該方法也是一個二維坐標的施測方法。是在控制點上測設一個角度和一段距離來確定求算點的平面位置。位置線是岸臺(已知點)至船(待定點)的方向線和由岸臺至船的距離形成的以岸臺為圓心、以岸臺至船的距離為半徑的圓弧線.位置方向線與位置圓弧線相交即可確定船位平面坐標的一種,利用某點到原點的距離和角度來確定這一點位置的方法(如圖2)。
此方法需兩組儀器共同配合進行水深測量(一組經緯儀配激光測距儀,一組測深儀)。在一岸或選取A、B兩個互為通視的已知點,在其中一點(A)架設經緯儀及激光測距儀,以另外一點(B)為后視。船上測量人員根據不同比例尺要求按照船行的距離通過對講機或旗語的方式要求定位,兩組儀器同時記錄該點位點的平面位置和水深。即:陸地測量人員利用經緯儀、激光測距儀分別記錄船位的α角及距離D;船間測量人員利用測深儀記錄該點位點的水深。內業處理時通過交會展點及量深,展匯成圖。此種方法應用儀器簡單,只用一臺經緯儀,一臺激光測距儀以及一臺測深儀。但是對測區工況條件也要求較高,控制點之間要互為通視,而且也不適用于區段較大的測區,根據經驗,激光測距儀測距范圍應控制在1.5千米以內,超出這個范圍激光測距儀測量移動船舶距離難度極大。如遇區段較大的測區同樣造成連續搬站的弊端。另外,在測深點定位時也不能達到實時同步。運用此種方法外業儀器操作人員數量不低于四人,人工投入相對大。
3 GPS三維后方交會法
GPS定位,實際上就是通過保證在任一時刻、任一地點高度角15度以上都能夠觀測到4顆以上的衛星來確定GPS接收器的位置。運行于宇宙空間的GPS衛星,每一個都在時刻不停地通過衛星信號向全世界廣播自己的當前位置坐標信息。任何一個GPS接收器都可以通過天線很輕松地接收到這些信息,并且能夠讀懂這些信息。目前定位精度最高的是差分定位,或稱相對定位。就是通過增加一個參考GPS接收器來提高定位精度。
采用GPS進行航道水深測量大幅度減少了外業工作強度,同時對測區的工況條件要求也降低了很多。在測區內選取A、B兩個已知點(并不要求互為通視),在其中一點架設GPS基站,求取其單點三參數做為移動臺的修改參數。移動臺在另一已知點檢校,如滿足精度要求即可施測(如圖3)。
該方法是一個四維坐標的施測方法。在船間配備GPS移動臺、數字測深儀以及安裝了測深軟件的筆記本電腦(數字測深儀自帶測量軟件系統),通過連接線將其連接。根據測圖的不同要求,可在測量外業軟件內按比例尺或時間設定不同的定位點采集間隔。所采集的改點數據是四維格式:及X、Y-坐標;H-水深;T-時間。在測量界面直接顯示出來并實時存入相應文件內。通過測量內業軟件將所測得的外業數據整理編輯導入相應的繪圖軟件成圖。此方法由軟件自動定位,GPS測定的平面位置與數字測深儀測得的該點水深能同步進行,運用此種方法外業儀器操作人員數量兩人,人工投入小。
結束語
隨著科技的不斷發展,航道水深測量將會越來越便捷準確。尤其中國自主研發北斗衛星導航系統(BeiDou Navigation Satellite System,BDS)是中國自行研制的全球衛星導航系統。是繼美國全球定位系統(GPS)、俄羅斯格洛納斯衛星導航系統(GLONASS)之后第三個成熟的衛星導航系統。北斗時代的到來會為航道水深測量帶來更便利的測量方式。■
