運輸機超低空空投下滑階段PIO趨勢評估與抑制
2016-05-23 08:30:31呂茂隆孫秀霞王棟劉日徐光智
飛行力學 2016年1期
呂茂隆, 孫秀霞, 王棟, 劉日, 徐光智
(空軍工程大學 航空航天工程學院, 陜西 西安 710038)
?
運輸機超低空空投下滑階段PIO趨勢評估與抑制
呂茂隆, 孫秀霞, 王棟, 劉日, 徐光智
(空軍工程大學 航空航天工程學院, 陜西 西安 710038)
摘要:提出了超低空空投下滑階段的PIO問題,研究了空投下滑拉平階段產生PIO的主要原因。基于描述函數法分析了速率限制反饋(RLF)PIO抑制系統的相位補償能力和PIO產生機理,推導了抑制PIO發生的計算公式。應用RLF連續信號相位補償法抑制PIO的發生,對階躍、離散和正弦三種易于誘發PIO現象的跟蹤任務進行了數值仿真。結果表明,超低空空投下滑拉平階段會發生PIO,嚴重威脅飛行安全,RLF對PIO具有較好的抑制效果。
關鍵詞:超低空空投; 駕駛員誘發振蕩; Neal-Smith準則; 速率限制反饋抑制器
0引言
運輸機超低空空投主要用于重型武器、載人裝備的精確投放,是提高現代高技術戰爭條件下作戰能力的必要手段[1-2]。超低空空投過程包括準備、下滑、改平、牽引和拉起五個階段。為保證運輸機空投下滑階段快速精確地跟蹤基準下滑軌跡,駕駛員需頻繁操縱飛機來調整下滑軌跡,所以這是一個人機交互頻繁的過程。在人機交互過程中,駕駛員易受自身(精神高度緊張)或環境因素[3-4](如大氣紊流、降雨等)的影響而做出不當操縱,并誘發不同程度的PIO。
目前,舵機速率限制問題已成為引起電傳飛機PIO的主導原因[5]。提高舵機速率可抑制PIO,但是因舵機重量和尺寸的限制,該方法未能被廣泛應用[6]。此外,運用相位補償技術也可抑制PIO的發生[7]:一是減少了駕駛桿命令增益或減少了反饋控制增益;二是速率飽和被激活時能對系統進行相位補償,可采用邏輯條件法和連續信號法設計相位補償系統。邏輯條件法僅在控制系統需要相位補償時工作,而連續信號法對控制系統產生持續的補償信號,更為有效[8]。
本文首先提出了超低空空投下滑拉平階段的駕駛員誘發振蕩問題,建立了含速率限制器的人機閉環系統數學模型;其次,應用Neal-Smith準則對PIO趨勢進行評估,基于描述函數法探究了PIO的產生機理,并獲得了抑制PIO的方法;最后,運用描述函數法研究了RLF抑制系統相位補償能力,并以某運輸機為算例進行了仿真,驗證了RLF抑制PIO的有效性。
1PIO趨勢評估準則及參數計算方法
超低空空投下滑階段是駕駛員對俯仰角控制來精確跟蹤基準下滑軌跡的關鍵階段。本文采用Neal-Smith準則預測PIO趨勢,準則在如圖1所示的閉合回路中假設了一個包含式(1)駕駛員模型的閉環系統:
(1)
式中:Kpe為駕駛員操縱增益;Tp1,Tp2分別為駕駛員超前、滯后補償參數,各參數在滿足人機閉環帶寬ωBW(反映快速性)和下沉量Δ(反映跟蹤性)要求下進行優化求得。

圖1 含駕駛員模型的單位反饋系統Fig.1 Unit negative feedback systems including pilot model
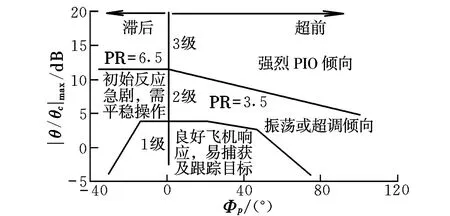
圖2 Neal-Smith參數平面Fig.2 Neal-Smith parameter plane
(2)
Neal-Smith準則對空投下滑拉平階段進行PIO趨勢評估的具體步驟如下[9]:
(1)選擇與空投任務相適應的帶寬頻率ωBW;
(2)調整駕駛員參數,獲得最佳閉環特性;
(4)根據圖2評估運輸機飛行品質。
2PIO致因及防范措施
2.1PIO致因分析
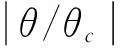
舵機速率限制已被視為導致發生PIO的主要誘因。原因如下:一是舵機速率限制造成了駕駛員操縱增益的減小,而駕駛員誤將這種滯后看作是控制效果的降低,從而使用更大的控制輸入,導致產生PIO;二是舵機速率限制在實際控制面和指令控制面位置之間產生額外的相位滯后或延遲,增加了駕駛員輸入和飛機響應之間的延遲。上述兩種情況如圖3所示,速率限制不嚴重時,舵機指令和舵機實際位置不一致,即輸入與輸出之間產生時間延遲,見圖3(a);速率限制嚴重時,輸出除相位延遲外還有幅值的明顯衰減,見圖3(b)。
圖3 飽和時速率限制環節時域響應Fig.3 Time domain response of saturated speed limit
2.2PIO防范措施
速率限制反饋抑制系統(RLF)是根據連續信號法設計的抑制系統。該系統由一個速率限制反饋和一個用于補償相位滯后的相位超前網絡構成,其結構如圖4所示[9]。
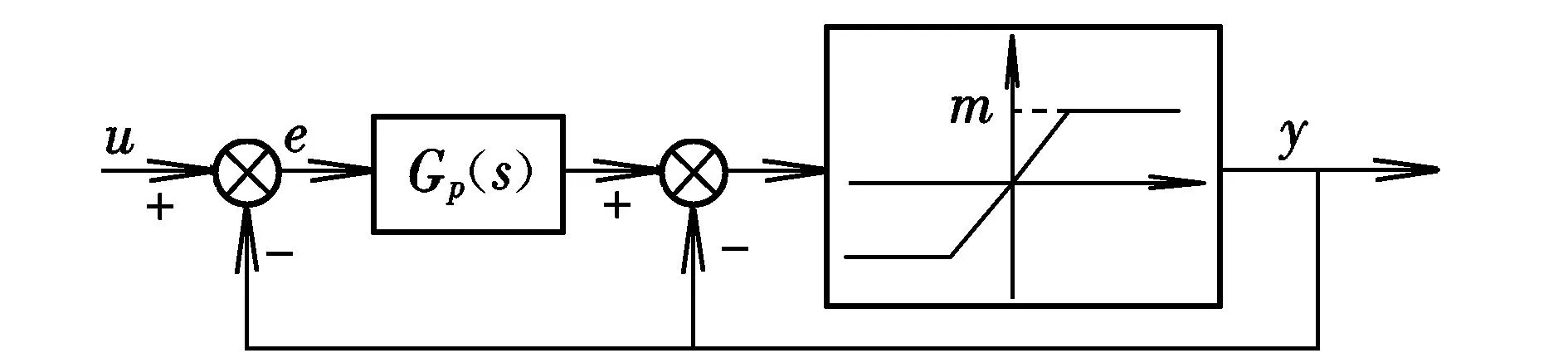
圖4 RLF抑制器結構框圖Fig.4 RLF suppressor structure diagram
采用RLF抑制器的人機閉環系統如圖5所示,駕駛員模型采用同步駕駛員模型[10],其中:
(3)

圖5 含RLF抑制器的人機閉環系統Fig.5 Closed-loop pilot-vehicle system including RLF suppressor
圖中:θ為運輸機俯仰角;θc為俯仰角指令;θe為俯仰角誤差;δc為操縱面指令;δ為操縱面偏角。用描述函數法分析圖5的非線性人機閉環系統,將人機閉環系統中的駕駛員、飛機本體等線性環節并入線性傳遞函數G(jω),用描述函數N(A,jω)表示速率限制舵機模型(G(jω)僅是頻率的函數,N(A,jω)是幅值和頻率的函數)。人機閉環非線性系統的閉環頻率特性可寫為:
(4)
上述非線性人機閉環系統穩定性取決于:

(5)
由式(5)得:
(6)
于是,線性傳遞函數成為描述函數的負倒數。G(jω)和-1/N(A,jω)的切點或交點即為閉環系統不穩定點。描述函數法對PIO進行預測的具體步驟如下:
(1)判定系統是否滿足函數描述法的應用條件;
(2)若滿足,則將速率限制環節負倒數描述函數和線性傳遞函數繪于同一Nichols圖中(見圖6);
(3)利用兩曲線之間相對位置判斷人機非線性系統的穩定性;
(4)若兩條曲線相切或相交,則切點和交點即為不穩定點。
抑制系統是否能抑制Ⅱ型PIO,取決于下式是否無解:
(7)
式中:∠Φ(A,jω)為抑制系統所能提供的相角。
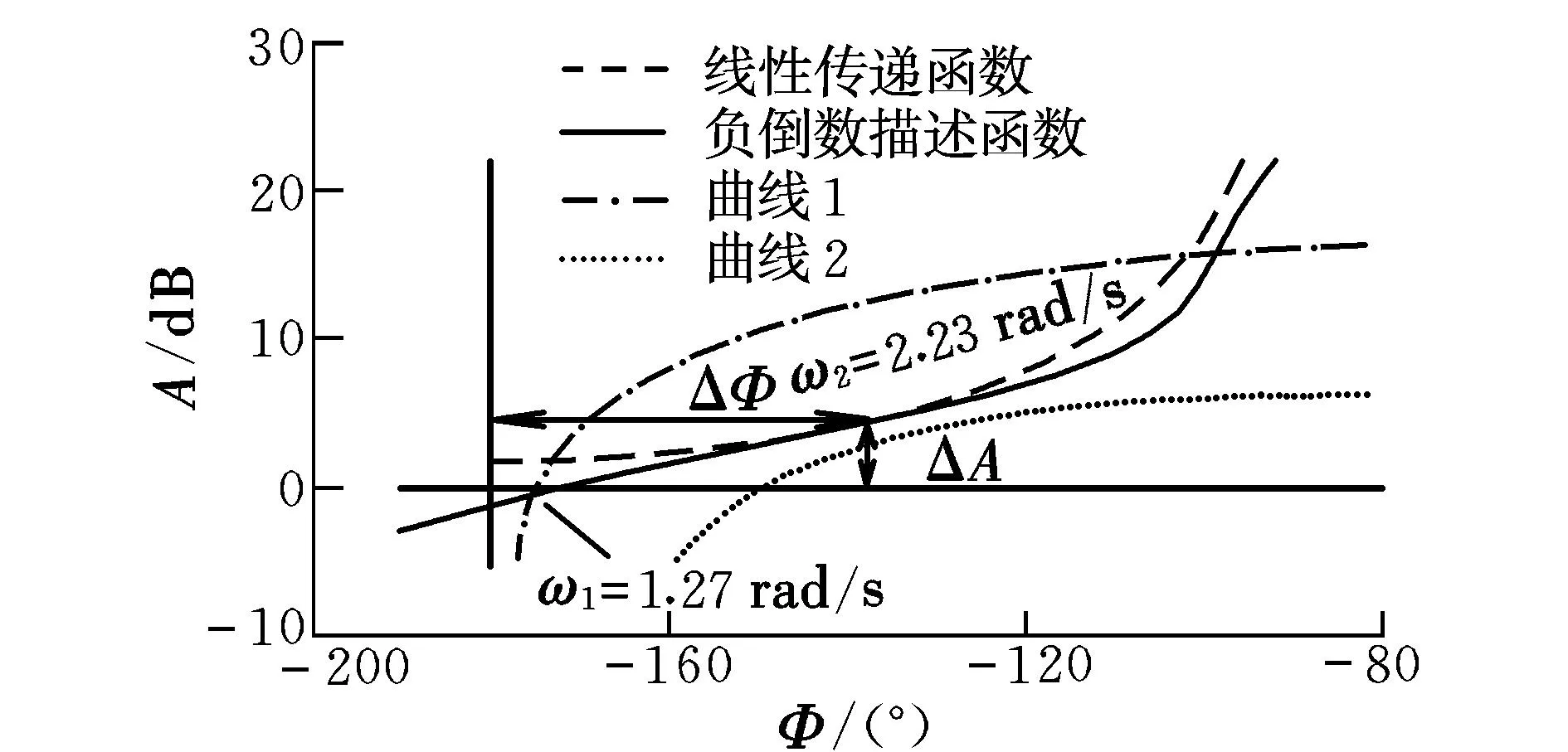
圖6 人機閉環系統Nichols圖Fig.6 Closed-loop pilot-vehicle system Nichols chart
從圖6可以看出:未加RLF時,線性傳遞函數曲線1和非線性描述函數曲線相交于兩個交點,RLF需提供在1.27~2.23 rad/s范圍內使系統穩定所需的相角,使兩條曲線既無交點也無切點; RLF抑制器使線性傳遞函數曲線2和非線性描述函數曲線相分離,兩曲線無交點,RLF補償了系統穩定所需相角,抑制了PIO的發生;因舵機速率限制引起的相位滯后ΔΦ=-40°和幅值衰減ΔA=-4.68 dB。
3仿真驗證與分析
3.1RLF性能分析

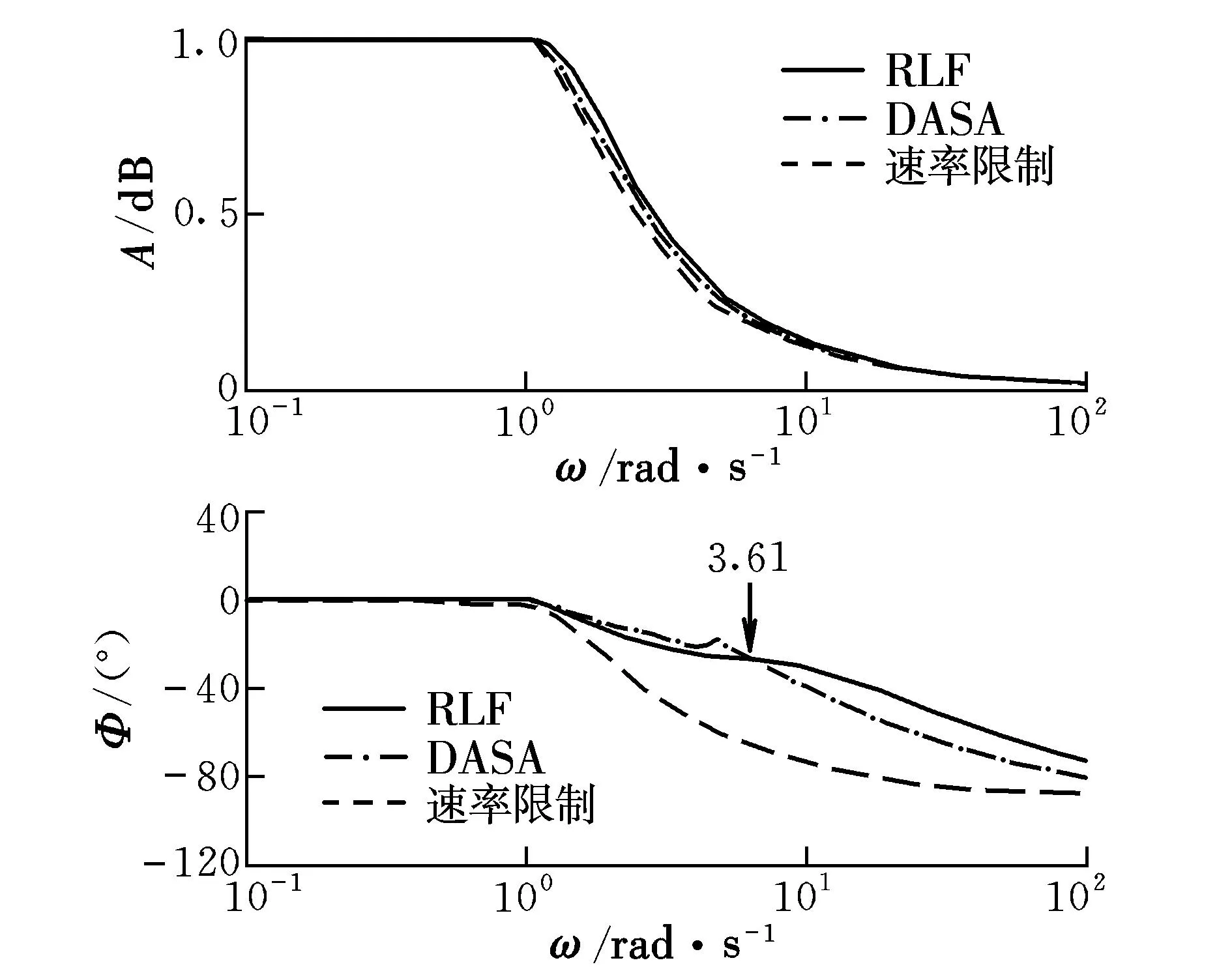
圖7 兩種抑制器Bode圖Fig.7 Bode charts of suppressors
可以看出,RLF和DASA的幅值變化基本一致,當ω>3.61 rad/s時,RLF抑制器補償的相位量較DASA明顯增多,即RLF具有更好的相位補償能力,抑制PIO效果強于DASA。
3.2RLF抑制空投下滑PIO效果驗證
本文選某型運輸機A,傳遞函數取式(3),Neal-Smith準則指標如表1所示。
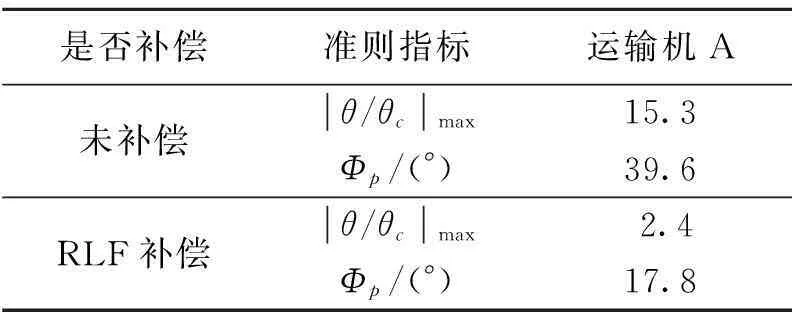
表1 Neal-Smith準則評價指標
根據圖2進行預測評估,評估結果表明:未補償時,運輸機A飛行品質為3級,有PIO趨勢;RLF補償后,飛行品質為1級,無PIO趨勢。
根據某運輸機A的數據,取a=2,b=5,VL=±15 rad/s,Gp(s)=3.28,針對不同任務,對圖5的人機閉環系統進行仿真。
3.2.1階躍跟蹤任務
階躍跟蹤任務是一種典型的跟蹤任務,可使速率限制器工作于惡劣的環境中,10°階躍輸入時域仿真結果如圖8所示。可以看出:未加RLF的飛機出現了持續的俯仰振蕩,且振蕩趨勢發散,這與評估結果一致,說明空投下滑拉平階段同樣會發生PIO,特別是在進入下滑軌道調整飛行姿態時更易發生PIO,造成下滑軌跡偏差瞬間增大,運輸機失控,嚴重威脅飛行安全;加入RLF使俯仰角超調量小且調節時間短,最終使俯仰角良好地跟蹤10°階躍輸入指令,運輸機的飛行狀態變得穩定,成功抑制了PIO。
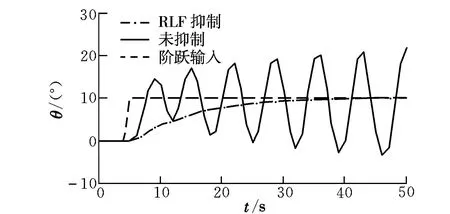
圖8 人機系統10°階躍輸入時間響應Fig.8 Ten degrees step input time responses of pilot-vehicle system
3.2.2離散俯仰跟蹤任務
為進一步測試RLF抑制器的性能,采用MIL-STD-1797A中的離散俯仰跟蹤任務,對該運輸機的仿真結果如圖9所示。
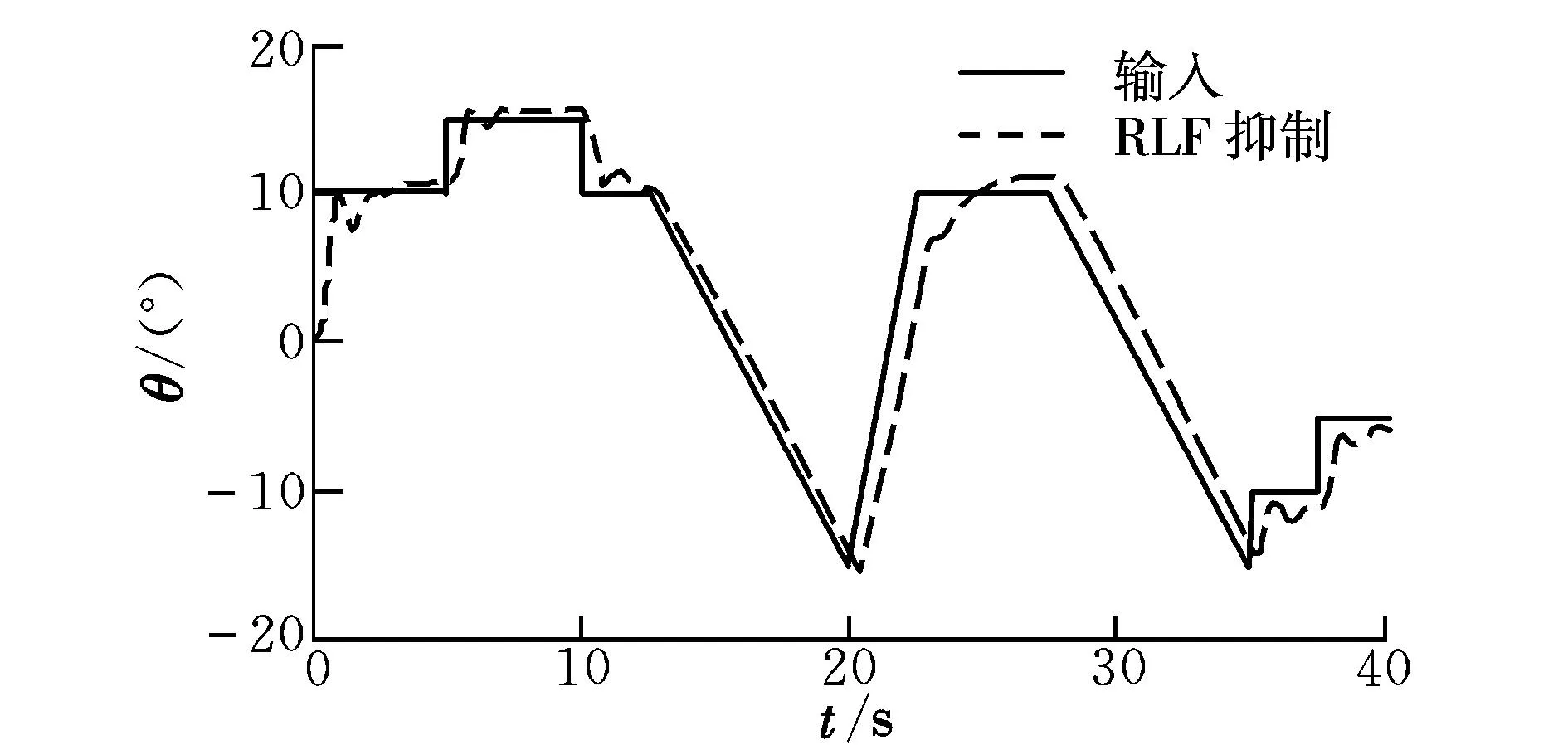
圖9 人機系統離散輸入時間響應Fig.9 Discrete input time responses of pilot-vehicle system
可以看出,RLF使飛機的俯仰角輸出信號較好地跟蹤了離散輸入信號,起到了較好抑制PIO的作用。
3.2.3正弦跟蹤任務
正弦跟蹤任務出現在跟蹤任務的最后階段,正弦跟蹤任務較離散俯仰跟蹤任務更易發現飛機的PIO趨勢,其目的是用于發現相位滯后,對該運輸機的仿真結果如圖10所示。
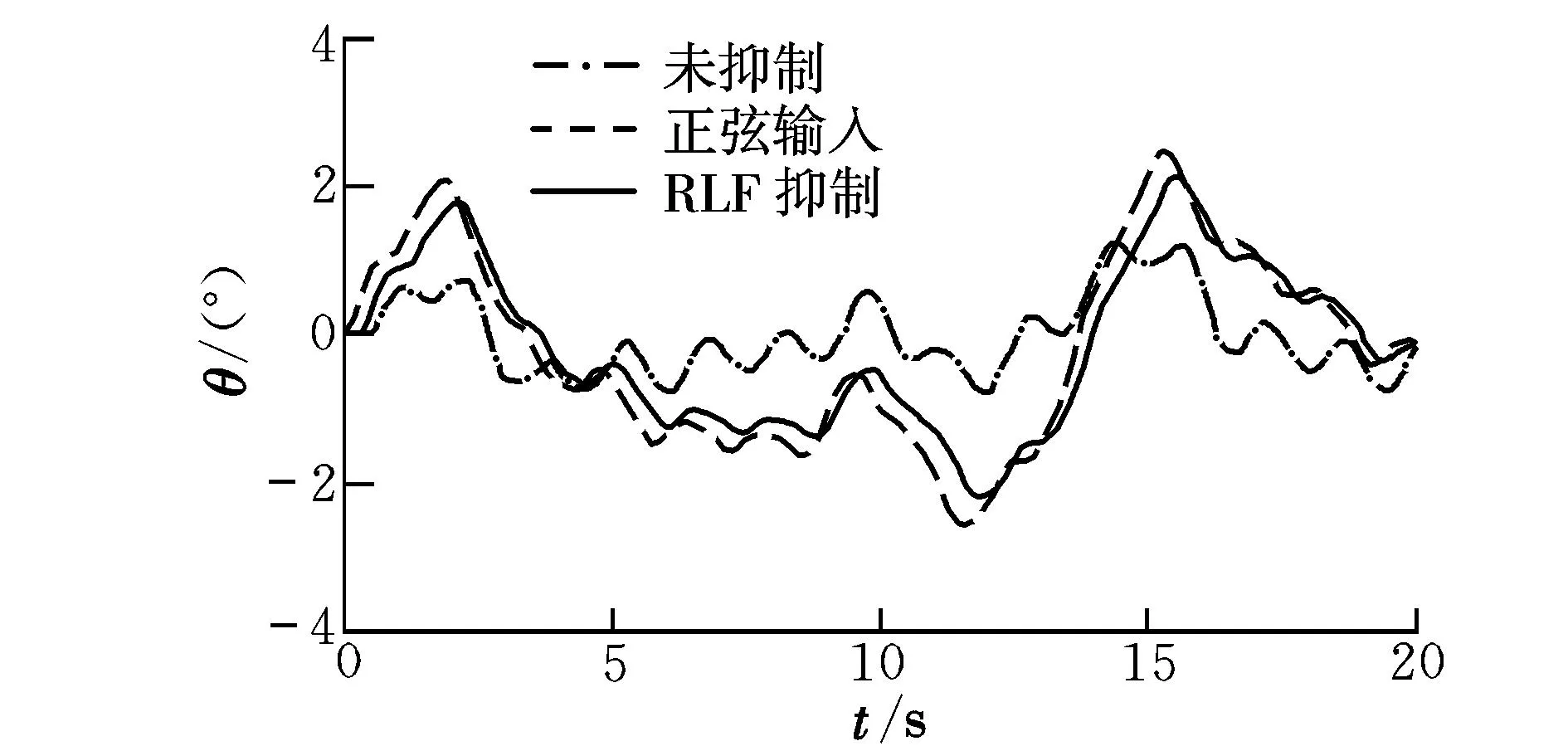
圖10 人機系統正弦輸入時間響應Fig.10 Sine input time responses of pilot-vehicle system
可以看出,RLF抑制器消除了運輸機的持續振蕩,且使俯仰角輸出信號較好地跟蹤了輸入信號。
4結束語
超低空空投是一個高精度、快速跟蹤的過程,若操縱不當,極易引發PIO問題。本文基于描述函數法探究了空投過程PIO產生機理,推導了抑制PIO發生的公式,在研究RLF抑制器的基礎上,將其應用到PIO的抑制中。從時域仿真角度對抑制器的抑制效能進行了驗證,通過Neal-Smith準則評估取得了與數值仿真一致的結論,可為我國運輸機超低空空投下滑階段的飛控系統設計提供參考。
參考文獻:
[1]Liu Ri,Sun Xiuxia,Dong Wenhan.Dynamics modeling and control of a transport aircraft for ultra-low altitude airdrop[J].Chinese Journal of Aeronautics,2015,28(3):478-487.
[2]Liu Ri,Sun Xiu-xia,Dong Wenhan,et al.Dynamics modeling andL1adaptive control of a transport aircraft for heavyweight airdrop[J].Mathematical Problems in Engineering,2015(01):1-15.
[3]楊雨,陸宇平,戴正升.基于動態逆的超低空空投抗側風控制器設計[J].飛行力學,2013,31(1):37-41.
[4]李智,陸宇平.運輸機超低空空投抗側風控制器設計[J].飛機設計,2011,31(6):32-36.
[5]Smith R H.Flight vehicle integration panel workshop on pilot-induced-oscillations:observations on PIO [R].AGARD-AR-335,1995.
[6]Alcala I,Gordillo F,Aracil J.Phase compensation design for prevention of PIO due to actuator rate saturation[C]//American Control Conference.Boston,MA,USA,2004:4687-4691.
[7]Liebst B S,Chapa M,Leggett D.Nonlinear profiler to prevent pilot-induced oscillations due to actuator rate limiting [J].Journal of Guidance,Control,and Dynamics,2002,25(4):740-747.
[8]Gatley S L,Turner M C,Postlethwaite I,et al.A comparison of rate-limit compensation schemes for pilot-induced-oscillation avoidance [J].Aerospace Science and Technology,2006,10(1):37-47.
[9]孟捷,徐浩軍,張建康.II型PIO反饋與前饋抑制系統對比[J].航空學報,2010,31(9):1701-1707.
[10]高金源,李陸豫,馮亞昌,等.飛機飛行品質[M].北京:國防工業出版社,2003:77-85.
[11]曹啟蒙,李穎暉,張煜,等.反饋結構RLF補償器在抑制Ⅱ型PIO中的應用研究[J].飛行力學,2011,29(5):10-13.
[12]李穎暉,朱廣東,曹啟蒙,等.前饋結構DASA抑制器在抑制PIO中的應用研究[J].飛行力學,2012,30(3):213-217.
(編輯:崔立峰)
Evaluation and suppression of PIO tendency during ultra-low altitude airdrop of transport airplanes
LYU Mao-long, SUN Xiu-xia, WANG Dong, LIU Ri, XU Guang-zhi
(Aeronautics and Astronautics Engineering College, AFEU, Xi’an 710038, China)
Abstract:The PIO problem in ultra-low altitude airdrop is put forward and the main causes of the PIO are analyzed. The phase compensation capability of RLF and mechanism of the PIO suppression are studied based on describing function method. The expression to prevent PIO is derived. The RLF phase compensating method is applied to avoid PIO. Step, discrete and sine tracking tasks are employed to study the suppression capability of the RLF suppresser in time domain simulation.The simulation results indicate when the rate limiter is saturated; the additional time delay might cause PIO during the ultra-low altitude airdrop process and threaten the safety of flight. The RLF suppresser works well in preventing the nonlinear PIO.
Key words:ultra-low altitude airdrop; PIO; Neal-Smith criterion; RLF
中圖分類號:V212.1
文獻標識碼:A
文章編號:1002-0853(2016)01-0026-05
作者簡介:呂茂隆(1991-),男,四川綿陽人,碩士研究生,主要研究方向為飛機飛行品質;孫秀霞(1962-),女,山東濰坊人,教授,博士生導師,博士,主要研究方向為現代魯棒控制和飛行控制。
基金項目:國家自然科學基金資助(60904038);航空科學基金資助(20141396012)
收稿日期:2015-05-12;
修訂日期:2015-09-02; 網絡出版時間:2015-09-28 14:00
