
永磁同步電動機自抗擾控制器設(shè)計
2016-05-25 11:07:56石一飛沈宇桐王玉
科技視界 2016年12期
關(guān)鍵詞:永磁同步電機
石一飛 沈宇桐 王玉
【摘 要】針對永磁同步電機矢量控制系統(tǒng)存在的參數(shù)魯棒性差、抗負載擾動性能差的缺陷,基于自抗擾控制原理,設(shè)計一種可以取代經(jīng)典PI控制器的速度環(huán)自抗擾控制器,該控制器估計系統(tǒng)的總擾動并進行前饋補償。Simulink仿真結(jié)果表明,自抗擾控制較常規(guī)PI控制有較好的動態(tài)性能及較強的抗負載擾動能立和魯棒性。
【關(guān)鍵詞】自抗擾控制器;永磁同步電機;矢量控制;速度控制
永磁同步電機具有響應(yīng)快、效率高、轉(zhuǎn)矩慣性比大和運行可靠性高等優(yōu)點,是高性能傳動和伺服系統(tǒng)執(zhí)行機構(gòu)的最佳選擇之一,得到廣泛的應(yīng)用。如機械工具、工業(yè)機器人、航空、航天、特種機床等場合。永磁同步電機矢量控制的性能指標主要通過速度環(huán)反映出來,要求速度控制調(diào)速范圍寬、響應(yīng)快、精度高,尤其是要求速度環(huán)控制對系統(tǒng)參數(shù)變化和負載擾動具有很強的魯棒性。傳統(tǒng)的永磁同步電機矢量控制方法借鑒早期的模擬式系統(tǒng)把速度環(huán)控制器設(shè)計為PI或者PID控制器,性能上滿足了工程應(yīng)用的基本要求,方法上簡單易行,獲得廣泛的應(yīng)用。但是電機本身是多變量、強耦合、非線性的控制對象,基于經(jīng)典控制理論的控制器在參數(shù)匹配良好的情況下性能良好,但是出現(xiàn)系統(tǒng)參數(shù)變化或者負載擾動,將導(dǎo)致系統(tǒng)控制性能性能下降,動態(tài)響應(yīng)和抗擾能力不能得到很好地兼顧。近些年各種非線性控制方案相繼出現(xiàn),如人工智能、無源控制、滑模控制、反推控制等,但是這些方法控制器往往較為復(fù)雜而且都是基于對象模型設(shè)計的,限制了其在實際中的應(yīng)用。
自抗擾控制是20世紀90年代我國韓京清研究員吸取現(xiàn)代控制理論的成就和發(fā)揚PID基于誤差反饋消除誤差控制精髓,提出的能夠替代PID控制技術(shù)的、不依賴被控對象精確模型的新型實用的數(shù)字控制技術(shù),在化工、電力、航天等領(lǐng)域得到推廣和應(yīng)用。它將系統(tǒng)參數(shù)變化和外界擾動形成的總擾動通過觀測器觀測并進行補償,具有很強的魯棒性,能較好的克服傳統(tǒng)PI控制器快速性和超調(diào)、快速性與抗擾動性能矛盾。鑒于自抗擾控制器需要整定的參數(shù)多、整定困難,本文采用Simulink仿真自抗擾控制算法,尋求自抗擾控制算法的參數(shù)整定方法,并與PI控制器進行比較研究,驗證方案的有效性。
1 自抗擾控制算法
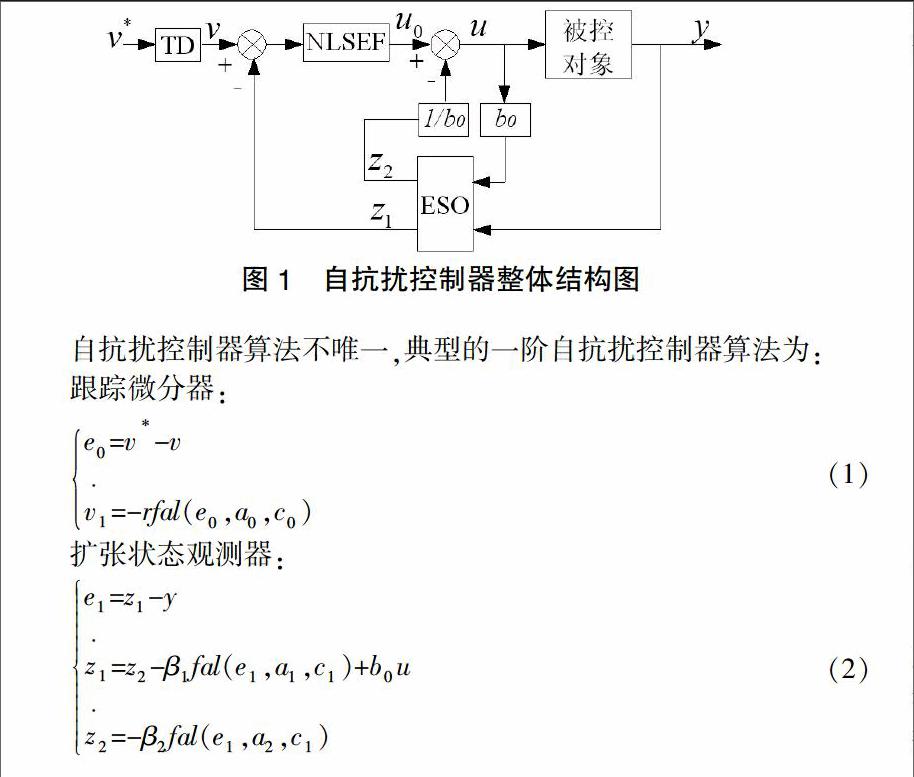
自抗擾控制器對經(jīng)典的PID控制進行優(yōu)化,采用“用誤差反饋消除誤差”的核心理念,把作用于被控對象的所有不確定因素都歸為“未知擾動”,用被控對象的電壓、電流等對它進行估計并補償,不需要外擾動的模型。包括跟蹤微分器(TD)、擴張狀態(tài)觀測器(ESO)和非線性狀態(tài)誤差反饋控制律(NLSEF)三部分,如圖1所示。
自抗擾控制器算法不唯一,典型的一階自抗擾控制器算法為:
2 仿真結(jié)果
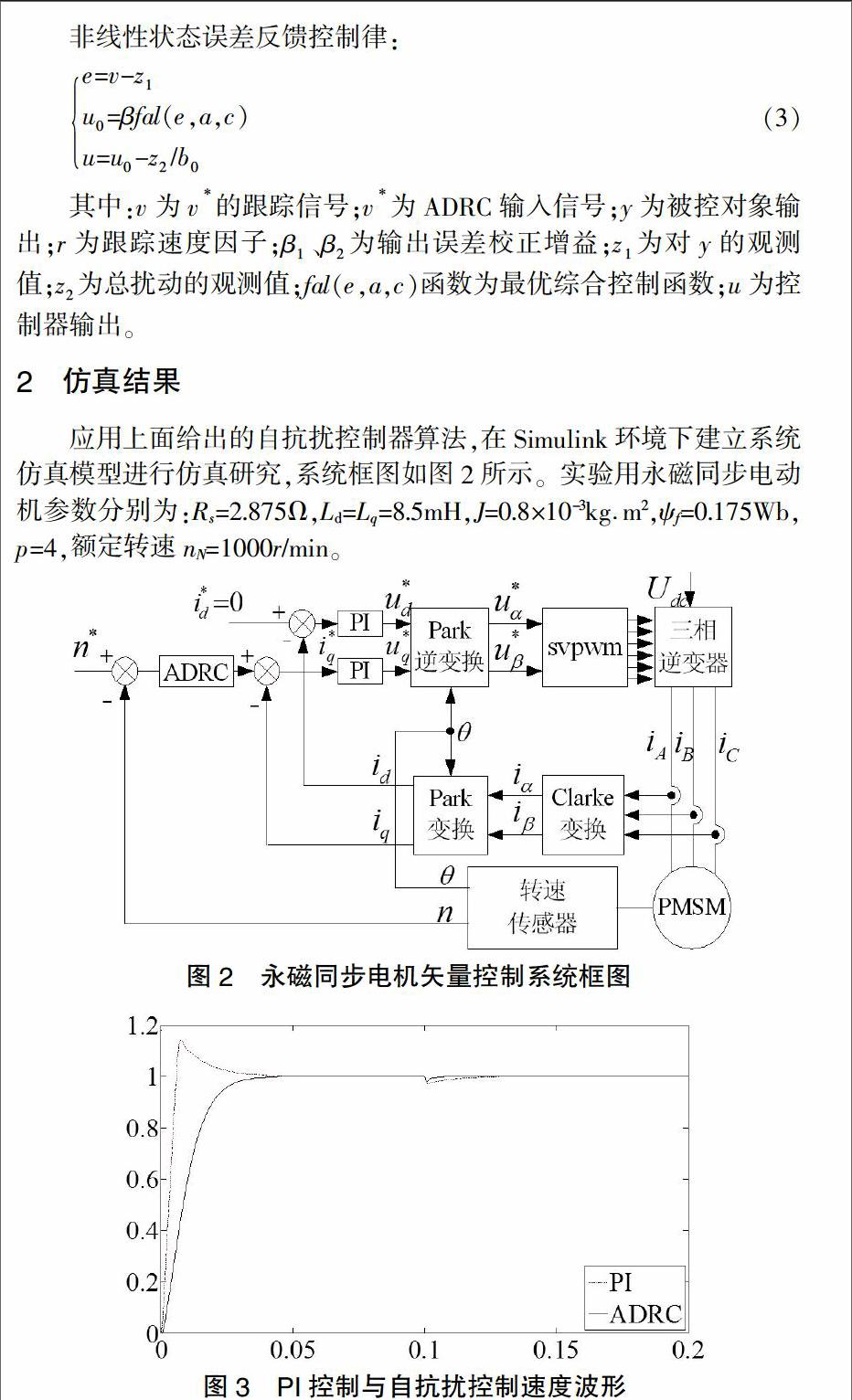
應(yīng)用上面給出的自抗擾控制器算法,在Simulink環(huán)境下建立系統(tǒng)仿真模型進行仿真研究,系統(tǒng)框圖如圖2所示。實驗用永磁同步電動機參數(shù)分別為:Rs=2.875Ω,Ld=Lq=8.5mH,J=0.8×10-3kg﹒m2,ψf=0.175Wb,p=4,額定轉(zhuǎn)速nN=1000r/min。
給定轉(zhuǎn)速1000r/min,系統(tǒng)空載起動,為觀察系統(tǒng)抗負載擾動能力,t=0.1s時突加3N·m負載轉(zhuǎn)矩。圖3為速度環(huán)采用PI控制器和自抗擾控制器的速度響應(yīng)曲線。可見,PI控制速度有較大超調(diào),突然加負載時速度降落略大,速度恢復(fù)時間較長,而自抗擾控制器響應(yīng)快、無超調(diào),抗負載擾動能力和魯棒能力較強,對系統(tǒng)無較大的損害。
3 結(jié)論
自抗擾控制是一種不依賴對象動態(tài)模型結(jié)構(gòu),但是允許對象存在不確定性的控制方案,本文在矢量控制系統(tǒng)基礎(chǔ)上進行速度環(huán)控制算法的研究,將自抗擾控制引入永磁同步電機速度環(huán)控制取代傳統(tǒng)PI控制器。仿真結(jié)果表明該方法抗負載擾動、魯棒性和自適應(yīng)性均較強,具有優(yōu)良的動、靜態(tài)性能。
【參考文獻】
[1]劉英培,栗然,梁海平.基于最小二乘支持向量機優(yōu)化自抗擾控制器的永磁同步電機直接轉(zhuǎn)矩控制方法[J].中國電機工程學報,2014,27:4654-4664.
[2]薛樹功,瞿成明,魏利勝.永磁同步電機自抗擾控制研究[J].安徽工程大學學報,2011,04:44-46.
[3]王超,李世華,田玉平.基于自抗擾技術(shù)的永磁同步電機直接轉(zhuǎn)矩控制[J].電氣傳動,2007,07:14-17.
[4]孫凱,許鎮(zhèn)琳,蓋廓,鄒積勇,竇汝振.基于自抗擾控制器的永磁同步電機位置伺服系統(tǒng)[J].中國電機工程學報,2007,15:43-46.
[5]林大鵬,扈宏杰.基于ARDC控制方法的電動舵機控制系統(tǒng)[J].自動化應(yīng)用,2016,01:21-22+24.
[6]黃慶,黃守道,伍倩倩,等.基于模糊自抗擾控制器的永磁同步電動機伺服系統(tǒng)[J].電工技術(shù)學報,2013,09:294-301.
[責任編輯:楊玉潔]
猜你喜歡
現(xiàn)代電子技術(shù)(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術(shù)與自動化(2016年4期)2017-01-11 14:06:23
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(shù)(2016年13期)2016-06-29 21:41:37
電腦知識與技術(shù)(2016年2期)2016-03-22 22:21:46
電腦知識與技術(shù)(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
科技與創(chuàng)新(2016年1期)2016-01-19 16:54:21
