汽車懸架系統(tǒng)電控減振技術(shù)及應(yīng)用分析
2016-05-30 19:53:30張春民
中國高新技術(shù)企業(yè)
2016年20期
張春民
摘要:隨著時代的進步,汽車行業(yè)發(fā)生了很大的變化,不僅基本的生產(chǎn)質(zhì)量得到了有效的提高,整體汽車運行技術(shù)也在逐漸升級,汽車懸架系統(tǒng)電控減振技術(shù)的運行是為了提供舒適的駕車體驗。文章對于汽車懸架系統(tǒng)電控減振技術(shù)的基礎(chǔ)原理進行了分析,并對汽車懸架系統(tǒng)電控減振技術(shù)的實際應(yīng)用進行了闡釋。
關(guān)鍵詞:汽車制造;懸架系統(tǒng);電控減振技術(shù);汽車行業(yè);汽車運行技術(shù) 文獻標識碼:A
中圖分類號:U463 文章編號:1009-2374(2016)20-0053-02 DOI:10.13535/j.cnki.11-4406/n.2016.20.025
時代的進步推動了我國基礎(chǔ)汽車行業(yè)的發(fā)展,不僅整體的汽車結(jié)構(gòu)實現(xiàn)了突破,整體的汽車基礎(chǔ)功能也在不斷進步,對于汽車的振動研究,需要相關(guān)人員進行優(yōu)化的技術(shù)升級,其中汽車懸架系統(tǒng)電控減振技術(shù)就是提高基礎(chǔ)汽車品質(zhì)的最新技術(shù)。在汽車行駛的過程中,產(chǎn)生的振動會對整體駕駛感受和車輛平衡造成影響,嚴重的情況會造成不良的汽車行駛狀態(tài)甚至是噪聲污染。
1 汽車懸架系統(tǒng)電控減振技術(shù)的內(nèi)涵
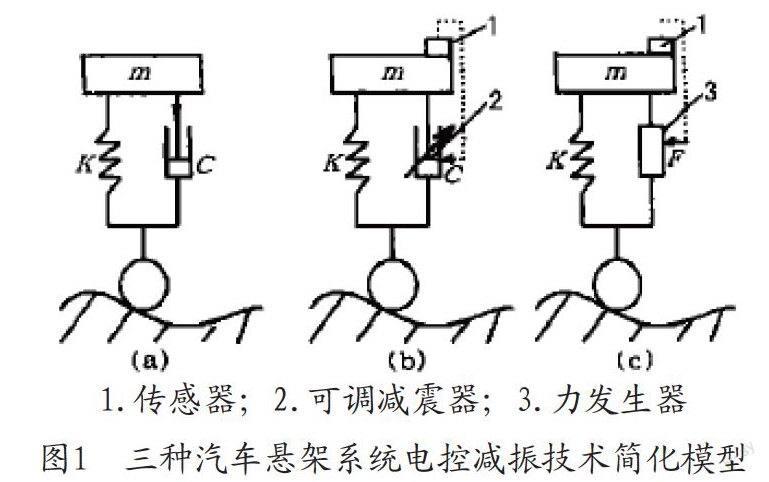
在汽車懸架系統(tǒng)電控減振技術(shù)運行過程中,主要運用的是懸架系統(tǒng),利用其中重要的彈性元件和基本阻尼元件的系統(tǒng)特性,保證基本道路緩沖能力的優(yōu)化,進行基本激振力的運用。并且在運行過程中也會對基本汽車轉(zhuǎn)向產(chǎn)生的側(cè)傾力進行良好的內(nèi)化,實現(xiàn)整體汽車平順性和穩(wěn)定性能的提升。另外,由于汽車懸架系統(tǒng)電控減振技術(shù)不斷的更新和完善,整體導向結(jié)構(gòu)也產(chǎn)生了不同的變化。……
登錄APP查看全文