機電伺服系統齒隙補償及終端滑模控制
2016-06-14 09:56:50李兵強陳曉雷呂帥帥馬冬麒
電工技術學報 2016年9期
李兵強 陳曉雷 林 輝 呂帥帥 馬冬麒
(西北工業大學自動化學院 西安 710129)
?
機電伺服系統齒隙補償及終端滑模控制
李兵強陳曉雷林輝呂帥帥馬冬麒
(西北工業大學自動化學院西安710129)
摘要針對機電伺服系統存在的齒隙非線性及參數時變問題,提出無抖振全階終端滑模控制補償策略。設計連續可微函數逼近齒隙非線性環節的死區模型,將擬合誤差、未建模動態及外部干擾疊加視為類似干擾項,建立擬合系統的狀態空間模型,并劃分為3個子系統,采用反演控制思想設計終端滑模控制器,使跟蹤誤差在有限時間內收斂到零點較小鄰域,實現對齒隙的精確補償。應用Lyapunov方法分析有限時間收斂條件及控制參數對系統的影響。通過實驗驗證了控制策略的有效性。
關鍵詞:機電伺服系統永磁同步電機齒隙非線性滑模控制反演控制
0引言
齒隙非線性由機械傳動機構中運動部件存在的間隙所引發,是動力傳遞過程不可避免的環節,也是影響機電伺服系統動態性能的主要因素。齒隙的存在會降低系統穩定性、引起振動與噪聲,由于齒隙具有動態及不可微特性,且難于精確測量,控制補償極為困難。從20世紀40年代至今,對齒隙非線性的研究伴隨著控制理論的發展而不斷深入[1,2]。近年來,隨著高性能機電伺服系統的廣泛應用及非線性控制理論的日趨成熟,含齒隙系統的控制設計成為控制領域歷久彌新的研究課題,已取得了豐碩的研究成果[1-10]。
在控制輸入端建立齒隙逆模型或近似可微逆模型,用以抵消齒隙非線性的影響,是應用最為廣泛的補償策略,與此相結合的控制算法包括自適應反演控制[3,4]、模糊控制[5]、神經網絡控制[6]、魯棒控制[7]、模型預測控制[8]、滑模控制[9]以及迭代學習控制[10]等。然而對于機電伺服系統而言,齒隙非線性環節難以簡單折算到控制輸入端,逆模型補償策略無法適用。采用齒隙的死區模型描述力矩傳遞關系[2]更符合實際,由此含齒隙的非線性系統可視為非光滑三明治系統[11]。由于該系統結構復雜,對其控制難度較大,研究成果并不多見。文獻[12]采用最優控制方法,針對系統接觸階段及齒隙階段分別設計不同的控制策略,在補償齒隙作用的同時可減小齒隙造成的機械沖擊,但控制結構復雜,在齒隙較小時難以實現有限時間內的最優調節,工程實現難度較大。文獻[13]采用可微函數擬合死區模型,并設計反演控制器,不足之處在于要求系統模型精確已知。文獻[14]采用模糊函數逼近反推過程中產生的未知非線性函數以簡化控制器設計,不足之處在于需采用擬合函數及其微分項作為狀態變量,系統狀態不具備清晰的物理涵義。
齒隙非線性是高性能機電伺服系統控制設計必須考慮的問題,要達到理想的齒隙補償效果不僅依賴于算法本身,還依賴于對從動機構運動的精密測量以及對伺服電機的精確控制。現有文獻均未考慮驅動機構自身的非線性特性以及負載變化對系統動態特性的影響。永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)具有轉矩脈動小、調速范圍寬、功率密度高等優勢,具有良好的發展前景[15],適用于作為伺服系統的驅動機構,然而PMSM本身具有強耦合特點[16],考慮其非線性特性的齒隙補償控制設計更具有工程意義。
反推控制(Backstepping Control)的優勢在于具有處理非匹配不確定的能力,保證系統的漸進穩定性,是處理高階非線性系統強有力的工具。本文設計了連續可微函數逼近機電伺服系統中齒隙非線性的死區模型[17],將擬合誤差表達為類似干擾項[3],建立了含齒隙環節的伺服系統狀態空間模型。應用反推控制的分塊設計方法,按物理結構將擬合模型劃分為3個子系統進行控制設計,利用無抖振全階滑模方法設計子系統控制器[18],發揮滑模控制處理匹配不確定的優勢,抑制未知擾動并得到平滑的虛擬控制量。利用反推方法完成交、直軸電流控制器設計。與常規逐層反推控制算法相比,設計步驟大為簡化,同時控制設計具有終端滑模特性,可實現跟蹤誤差在有限時間內收斂,提升齒隙補償效果。
1含齒隙的機電伺服系統數學模型
考慮齒隙作用,將PMSM驅動的機電伺服系統分解為驅動部分和從動部分,驅動部分包括伺服電機、驅動器、控制器和傳感器。假設定子為三相對稱繞組,轉子為無阻尼繞組,氣隙磁場呈正弦分布,磁路不飽和,不計磁滯和渦流損耗影響,表貼式PMSM的數學模型為[19]
(1)
式中,θ為轉子機械角位移;ω為轉子機械角速度;p為磁極對數;φf為耦合磁鏈;J為折算到電機軸上的等效轉動慣量;id、iq分別為定子電流矢量的d、q軸分量;bm為粘性摩擦系數;Tl為折算到電機軸上的負載力矩;R為繞組電阻;L為繞組電感;ud、uq分別為定子電壓矢量的d、q軸分量。
從動部分的動力學方程為
(2)
式中,Jl為負載轉動慣量;θl為負載輸出轉角;bl為粘性阻尼系數;η為減速比;Tf為負載力矩。
齒隙作用于連接驅動部分和從動部分的傳動機構中,Tl與傳動機構相對位移的關系可由死區模型表示為[13]
(3)
式中,Δθ=θ-ηθl; α為1/2齒隙寬度;k為主從動齒輪嚙合處的剛度系數。采用如下連續可微函數擬合死區模型[17]
(4)
式中,τ為擬合常數。定義擬合誤差為
TΔ=Tl-Ts=Tl-kΔθ-4kαε(Δθ)
(5)
Tl=k(θ-ηθl)+4kαε(θ-ηθl)+TΔ
(6)
(7)
將式(6)代入式(1),機械方程可寫為
(8)
電流環動態特性與電磁轉矩相關,是衡量伺服性能的關鍵指標。隨著電機運行中繞組溫度的變化,電機的電磁特性將發生改變(如電阻、電感等參數會有較大變動),因此將模型誤差及未建模動態視為未知干擾。定義狀態變量x=[θl, ωl, θ, ω, iq, id],聯立式(1)、式(2)、式(7)和式(8)可得整體系統狀態方程為
(9)
式中,y為系統輸出;uq、ud為控制量;di為未知擾動,i=1,…,4。

2控制器設計
2.1從動子系統控制設計

(11)
(12)
(13)
(14)
(15)
可知從動子系統為漸近穩定且滑模面可在有限時間內到達[18],隨后系統可在有限時間內,任意初始條件z1(0)≠0下沿滑模面運動到z1=0。
2.2PMSM機械子系統控制設計
(16)
(17)

(18)
(19)
同理可知系統漸近穩定。
2.3PMSM電氣子系統設計

(20)
(21)
式中,c3、 c4為正實數;0<α3,α4<1。
設計交軸電壓uq為
(22)
設計直軸電壓ud為
(23)
2.4穩定性分析
引理1:若a1,a2,…,an皆為正實數,δ∈(0,2),則下列不等式成立[21]
(24)
引理2:若連續可微Lyapunov函數V(t)滿足如下不等式[22]

(25)
式中,α, β>0,0<γ<1,則V(t)可在有限時間內收斂到零點,收斂時間為
(26)
定理1:對式(9)所示含齒隙的機電伺服系統,虛擬控制量設計如式(11)和式(17)所示,采用式(22)和式(23)所示反饋控制律,若滿足假設1和假設2,取適當的滑模面參數及控制器參數ηi、 κi,則滑模面有限時間內可達,跟蹤誤差隨后在有限時間內收斂為零。
證明:選取整體系統的Lyapunov函數為
(27)
對式(27)求微分得
(28)

(29)

(30)
由引理2可知,系統可在有限時間內到達滑模面
(31)
結合終端滑模面性質,可知跟蹤誤差隨后在有限時間收斂為零。終端滑模控制具有較強的魯棒性,但齒隙補償效果及誤差收斂速度仍依賴模型先驗知識,通過對參數τ的合理設置提高齒隙擬合準確度可縮小TΔ,從而減小V(t0),縮短滑模面到達時間。
3實驗驗證
3.1實驗平臺
為驗證控制算法的有效性,在自行研制的機電伺服系統實驗臺上進行實驗,平臺結構如圖1所示。實驗平臺主要由驅動電機、控制器、傳感器、傳動機構、減速齒輪及電源等構成。為檢測系統在時變載荷下的控制性能,設計負載模擬器作為加載裝置,實現對負載力矩的閉環控制。控制器采用TMS320F2812,逆變單元采用IGBT組成全橋結構,通過光電編碼器進行位置測量。驅動電機采用表貼式PMSM,參數為:p=5,φf=0.143 Wb,J=2.84×10-4kg·m2,bm=1.0×10-4N·m/rad/s,R=1.73 Ω,L=7 mH,額定轉矩Te=4.7 N·m,直流母線電壓Vdc=270 V。從動機構參數為:Jl=0.4 kg·m2,bl=0.12 N·m/(rad/s),η=30。齒隙參數為:k=200 N·m/rad,τ=22,α=0.023 rad。
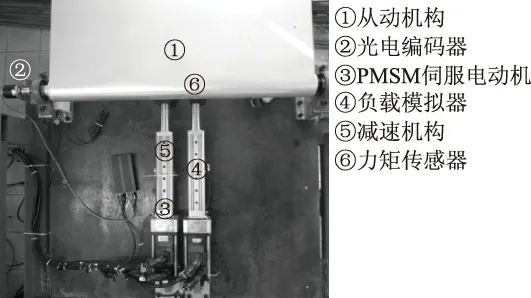
圖1 實驗平臺Fig.1 Experimental platform
3.2與線性控制對比結果
與不考慮齒隙作用的線性控制進行對比,PMSM速度環及電流環采用PI控制器,位置環采用PID控制,反饋信號為θl。 實驗結果如圖2所示。
由圖2a、圖2b可知,當指令信號運動方向發生改變時,齒隙導致從動機構實際運動出現滯后效應,跟蹤誤差逐漸增大,在渡過齒隙階段后由于沖擊作用導致跟蹤誤差呈現明顯的振蕩,隨后在控制作用下誤差逐漸變小。由圖2c、圖2d可看出,齒隙非線性對電機轉速和電流產生持續的干擾作用。
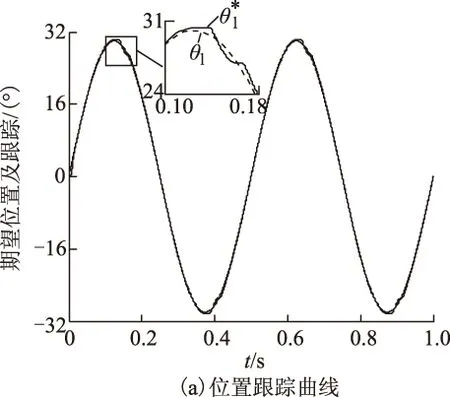
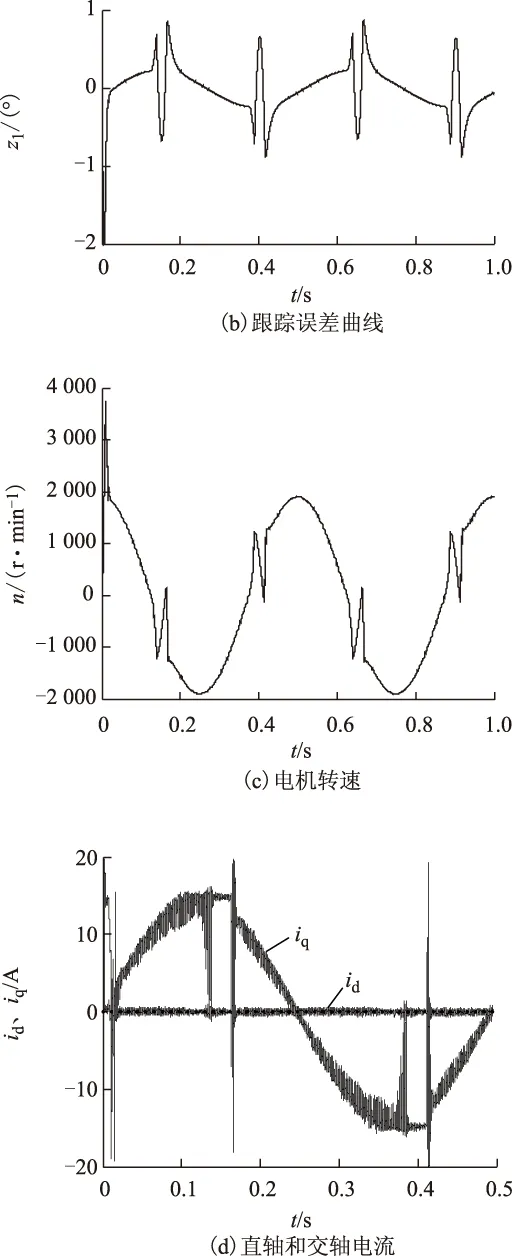
圖2 線性控制實驗結果Fig.2 Results of classical linear control method
驗證本文方法的齒隙補償效果,滑模面參數設置為:c12=c22=7,c11=c21=10,c3=c4=5,α12=α22=α3=α4=9/16,α11=α21=9/23; 控制器參數設置為:Ti=0.1,kdi=4,kT1+η1=kT2+η2=6,kT3+η3=kT4+η4=3。 κ1=κ2=200,κ3=κ4=100。 實驗結果如圖3所示。
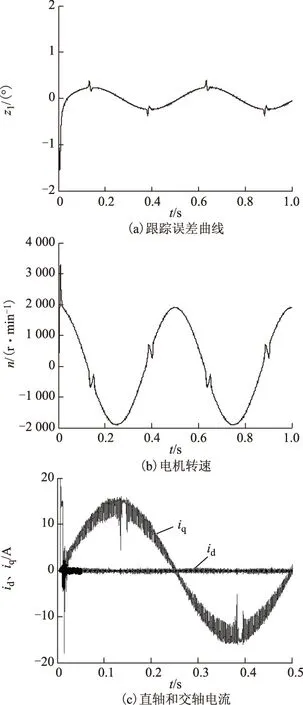
圖3 本文方法實驗結果Fig.3 Results of the proposed method
由圖3a可知,考慮齒隙非線性因素進行控制律設計,有效抑制了齒隙影響,使跟蹤誤差顯著減小,控制質量得到顯著提升。由圖3b、圖3c可知,主動對齒隙進行補償時,在齒隙作用階段存在控制量激增的過程,使系統快速渡過齒隙階段,消除齒隙影響。
3.3齒隙擬合參數τ對系統影響
由式(3)和式(4)可知,當齒隙特性完全確定時,τ是惟一決定擬合準確度的參數,文獻[14]得到特定條件下的最佳τ取值方法。文獻[17]采用滑模觀測器辨識齒隙參數,從實驗結果來看,與理想齒隙模型相比,真實傳動機構的齒隙特征更為復雜。考慮齒隙模型參數時變將導致問題復雜性,τ取不同值時的跟蹤誤差如圖4所示。
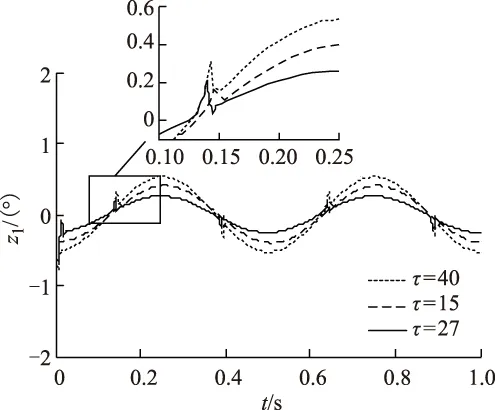
圖4 不同τ值控制結果Fig.4 Results with different τ
對比圖3a可看出跟蹤誤差有一定程度的增加,這是由于可微函數擬合準確度有所降低,導致非匹配不確定項的增大,但滑模控制具有很強的干擾抑制能力,合理調節τ仍可實現較好的控制效果,這也體現出本文算法與常規反演算法相比具有抗擾動能力及魯棒性的優勢。
4結論
針對PMSM驅動的機電伺服系統中存在的齒隙非線性,基于反演控制思想,設計全階無抖振終端滑模控制器,得到以下結論:
1)本文算法可有效實現齒隙補償,在負載和齒隙特征發生變化時具有強魯棒性。
2)利用分塊設計思想虛擬控制量,可降低常規反演或動態面控制需逐層遞推的復雜程度,適用于高階非線性系統,與高階滑模控制器設計相比,避免了精確線性化過程依賴模型準確度的困難。
3)考慮伺服電機本身的非線性因素,設計無抖振滑模控制得到連續的電流控制律,并分析了影響齒隙補償控制效果的若干因素,研究方法亦可推廣到其他驅動機構的伺服系統及多關節伺服系統齒隙補償設計。
參考文獻
[1]Gang T,Kokotovic P V.Adaptive control of systems with backlash[J].Automatica,1993,29(2):323-335.
[2]Mattias N,Per G.Controlling mechanical systems with backlash:a survey[J].Automatica,2002,38(10):1633-1649.
[3]Zhou J,Wen C Y,Zhang Y.Adaptive backstepping control of a class of uncertain nonlinear systems with unknown backlash-like hysteresis[J].IEEE Transactions on Automatic Control,2004,49(10):1751-1759.
[4]Zhou J,Zhang C J,Wen C Y.Robust adaptive output control of uncertain nonlinear plants with unknown backlash nonlinearity[J].IEEE Transactions on Automatic Control,2007,52(3):503-509.
[5]Liu Y J,Tong S C.Adaptive fuzzy control for a class of nonlinear discrete-time systems with backlash[J].IEEE Transactions on Fuzzy Systems,2014,22(5):1359-1365.
[6]Wang H Q,Chen B,Liu K F,et al.Adaptive neural tracking control for a class of nonstrict-feedback stochastic nonlinear systems with unknown backlash-like hysteresis[J].IEEE Transactions on Neural Networks and Learning Systems,2014,25(5):947-958.
[7]Tarbouriech S,Queinnec I,Prieur C.Stability analysis and stabilization of systems with input backlash[J].IEEE Transactions on Automatic Control,2014,59(2):488-494.
[8]Philipp R,Thomas B,Miroslav B,et al.Hybrid approach to modeling,control and state estimation of mechanical systems with backlash[J].International Journal of Control,2007,80(11):1729-1740.
[9]Corradini M L,Orlando G.Robust stabilization of nonlinear uncertain plants with backlash or dead zone in the actuator[J].IEEE Transactions on Control Systems Technology,2002,10(1):158-166.
[10]朱勝,孫明軒,何熊熊.齒隙非線性輸入系統的迭代學習控制[J].自動化學報,2011,37(8):1014-1017.
Zhu Sheng,Sun Mingxuan,He Xiongxiong.Iterative learning control of a class of nonlinear systems with input backlash[J].Acta Automatica Sinica,2011,37(8):1014-1017.
[11]Taware A,Tao G,Teolis C.Design and analysis of a hybrid control scheme for sandwich nonsmooth nonlinear systems[J].IEEE Transactions on Automatic Control,2002,47(1):145-150.
[12]Tao G,Ma X L,Ling Y.Optimal and nonlinear decoupling control of systems with sandwiched backlash[J].Automatica,2001,37(2):165-176.
[13]Shi Z G,Zuo Z Y.Backstepping control for gear transmission servo systems with backlash nonlinearity[J].IEEE Transactions on Automation Science and Engineering,2015,12(2):752-757.
[14]杜仁慧,吳益飛,陳威,等.考慮齒隙伺服系統的反步自適應模糊控制[J].控制理論與應用,2013,30(2):254-260.
Du Renhui,Wu Yifei,Chen Wei,et al.Adaptive backstepping fuzzy control for servo systems with backlash[J].Control Theory & Applications,2013,30(2):254-260.
[15]付培華,陳振,叢炳龍,等.基于反步自適應滑模控制的永磁同步電機位置伺服系統[J].電工技術學報,2013,28(9):288-293.
Fu Peihua,Chen Zhen,Cong Binglong,et al.A position servo system of permanent magnet synchronous motor based on back-stepping adaptive sliding mode control[J].Transactions of China Electrotechnical Sosiety,2013,28(9):288-293.
[16]黃慶,黃守道,伍倩倩,等.基于模糊自抗擾控制器的永磁同步電動機伺服系統[J].電工技術學報,2013,28(9):294-301.
Huang Qing,Huang Shoudao,Wu Qianqian,et al.PMSM servo system based on fuzzy active-disturbance rejection controller[J].Transactions of China Electrotechnical Sosiety,2013,28(9):294-301.
[17]Merzouki R,Davila J A,Fridman L,et al.Backlash phenomenon observation and identification in electromechanical system[J].Control Engineering Practice,2007,15(4):447-457.
[18]Feng Y,Han F L,Yu X H.Chattering free full-order sliding-mode control[J].Automatica,2014,50(4):1310-1314.
[19]許敘遙,林輝.基于動態滑模控制的永磁同步電機位置速度一體化設計[J].電工技術學報,2014,29(5):77-83.
Xu Xuyao,Lin Hui.Integrated design for permanent magnet synchronous motor servo systems based on dynamic sliding mode control[J].Transactions of China Electrotechnical Sosiety,2014,29(5):77-83.
[20]Levant A.Chattering analysis[J].IEEE Transactions on Automatic Control,2010,55(6):1380-1389.
[21]Yu S H,Yu X H,Bijan S,et al.Continuous finite-time control for robotic manipulators with terminal sliding mode[J].Automatica,2005,41(11):1957-1964.
[22]Nekoukar V,Erfanian A.Adaptive fuzzy terminal sliding mode control for a class of MIMO uncertain nonlinear systems[J].Fuzzy Sets and Systems,2011,179(1):34-49.
作者簡介
李兵強男,1982年生,副教授,博士,研究方向為電機伺服控制理論、迭代學習控制。
E-mail:libingqiang@nwpu.edu.cn
陳曉雷男,1980年生,博士研究生,研究方向為伺服系統及非線性控制。
E-mail:chenilc@126.com(通信作者)
Terminal Sliding Mode Control for Mechatronic Servo Systems with Backlash Nonlinearity Compensation
Li BingqiangChen XiaoleiLin HuiLü ShuaishuaiMa Dongqi
(School of AutomationNorthwestern Polytechnical UniversityXi’an710129China)
AbstractIn order to overcome the problem of backlash nonlinearity and parameter time-varying in mechatronic servo systems,a chattering free full order sliding mode control strategy is proposed.The dead zone model of the backlash nonlinearity can be approximated by the proposed differentiable function.The superposition of the approximation error,the unmodeled dynamics,and the external disturbance can be regarded as the disturbance-like term.The continuous state-space model of the servo systems with the backlash nonlinearity is established and divided into three subsystems.The terminal sliding mode control law is constructed based on the backstepping design principle,which can make the tracking error converge to an arbitrarily small residual within finite time and achieve the precise compensation of the backlash.The finite-time convergence condition of the closed-loop system is analyzed using the Lyapunov theory.The experimental test verifies the effectiveness of the proposed control approach.
Keywords:Mechatronic servo systems,permanent magnet synchronous motor,backlash nonlinearity,sliding mode control,backstepping control
中圖分類號:TP273
國家自然科學基金(51407143)、高等學校博士學科點專項科研基金(20136102120049)、陜西省自然科學基礎研究計劃(2014JQ7264,2015JM5227)、中央高校基本科研業務費(3102014JCQ01066)和陜西省微特電機及驅動技術重點實驗室開放基金(2013SSJ1002)資助項目。
收稿日期2015-08-11改稿日期2016-01-12
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16