微懸臂振動干涉測量非正交信號的處理算法
2016-06-23 03:20:22王選擇孔德靖翟中生
中國機械工程 2016年4期
關鍵詞:測量
王選擇 孔德靖 翟中生
湖北工業大學, 武漢,430068
微懸臂振動干涉測量非正交信號的處理算法
王選擇孔德靖翟中生
湖北工業大學, 武漢,430068
摘要:設計了干涉條紋形狀對懸臂角度變化不敏感的干涉光路系統,針對實際干涉條紋光電轉換信號的特點,提出了對難以保證正交化的兩路信號進行實時橢圓擬合的方法。應用橢圓擬合及換算參數的結果,推導了干涉條紋相位變化的理論公式。最后,根據相位量與振動位移量的關系,以及振動位移連續性的特點,通過直接解包裹的銜接算法,得到了最終振動位移量。實驗表明,該方法在保證足夠采樣頻率的條件下,無需額外硬件計數電路,就能完成微懸臂振動位移的干涉量級精度的測量。
關鍵詞:測量;微懸臂;相位差;橢圓擬合;相位解包裹
0引言
微電子機械系統(MEMS)技術是建立在微米/納米技術基礎上的21世紀前沿技術[1-2]。其中懸臂結構是MEMS器件[3]中常用的一種結構,利用懸臂振動進行被測物質的定量分析的原理可用于構建以微懸臂梁為傳感元件的傳感器,在汽車、航空航天、生物、化學、環保、軍事等領域有著廣泛的應用前景[4-5]。而激光干涉法[6]利用光波干涉測量懸臂梁的變形量[7],是一種高精度無需標定的非接觸測量方法。干涉條紋一般采用象限光電管[8]或CCD接收。
對干涉信號采用合適的接收與處理方法,有利于提高干涉測量的精度。傳統的對干涉條紋采用象限光電接收的方法,一般要求兩組正交的光電轉換信號[9-11],才能達到辨向細分的高精度測量目的。然而,實際測量系統中,干涉條紋形狀由參考光與測量光方位角共同決定,傳統激光準直光路中,任何一路光束方向的毫弧級變化,都將導致條紋形狀較大的變化[12-13],因此,這種光路在測量過程中,干涉條紋形狀受懸臂角度變化的影響大,不適合懸臂的測量。另一方面,由于加工和安裝誤差等因素的影響,測量系統參考光與測量光的初始夾角,無法保證測量系統獲取理想的干涉條紋形狀,需要相應調節光電管的方位,使兩路信號滿足正交性。
針對上述問題,筆者首先設計了一種干涉條紋形狀對懸臂角度變化不敏感的干涉光路,該干涉光路適合微懸臂短行程的測量。其次,為了減少對測量系統調整的工作量,增大系統對安裝誤差的冗余度,提出利用軟件算法對非正交干涉信號進行處理的方法,彌補正交條件[14]的不足。為此,在對兩路光電接收干涉條紋信號進行數學建模分析的基礎上,利用實時橢圓擬合方法[15-16]對兩路信號進行擬合。根據橢圓擬合與參數換算后得到的幅值、直流偏置和相位差的結果,推導了條紋運動相位變化的相關算法。最后,根據相位與振動位移的關系,以及振動位移變化連續性的特點,通過直接解包裹的銜接算法[17-21],得到了完整的懸臂振動位移。
1懸臂干涉測量系統
測量系統的原理如圖1所示,半導體激光器發出的激光,通過聚焦棱鏡后,入射到分光棱鏡上,然后分成兩束光,分別聚焦在反射鏡和懸臂梁上。經過反射鏡和懸臂梁反射后,再次投射到分光棱鏡上,部分光重合后在探測器上形成干涉條紋。

圖1 測量系統結構示意圖
這種測量系統的特點在于聚焦干涉,適合短行程的干涉測量。其優點在于一方面使光斑能夠聚焦到微小結構的懸臂上,另一方面,系統產生的干涉條紋在探測器上得到自然的放大,且微懸臂振動產生的微小角度變化對條紋形狀變化的影響可忽略[10,22]。
系統采用圖2所示的二象限探測器對干涉條紋信號進行光電轉換。只要探測器與條紋方向存在一個小的偏角[11],兩路干涉信號之間就存在一個恒定的相位差。
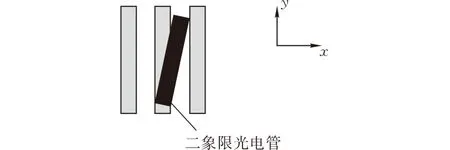
圖2 光電管相對條紋位置示意圖
2干涉信號數學建模與算法設計
干涉條紋形狀由參考光與測量光兩路光束夾角決定[22]。由于加工和安裝誤差的影響,以及激光器光斑光強分布影響,對于每個測量儀器個體,干涉條紋形狀難以達到均勻、一致的要求。這就致使象限探測器接收的干涉條紋信號,在實際測量系統中無法滿足正交化的要求。因此,非正交化條紋信號的處理顯得非常必要。
2.1干涉信號的數學建模
雖然干涉場中每一點的相位與所處干涉條紋位置有關,但干涉場中每點相位的變化和懸臂位移之間均滿足如下關系:
(1)
式中,θ為干涉相位變化量;s為懸臂位移量;λ為激光波長。
利用圖2中二象限光電管接收干涉條紋的方法,在保證光電管與干涉條紋之間有一個小傾角的條件下[9],兩路光電轉換信號之間有一個相差,數學表達式滿足如下形式:
(2)
式中,x、y為兩路轉換信號;A、B分別為兩路信號的幅值,且A、B>0;C1、C2分別為兩路信號的偏置量;φ為兩路信號的相位差,且當φ=π/2時,x、y為兩路正交信號。
圖3顯示了在實際測量懸臂振動過程中,隨時間變化,同時采集的兩路干涉信號曲線。實線代表x路信號,虛線代表y路信號;橫坐標為兩路信號的采樣點序號,縱坐標為12位AD采樣電壓的數字量。信號的采樣周期為2000Hz,圖中選取其中的400個采樣點。
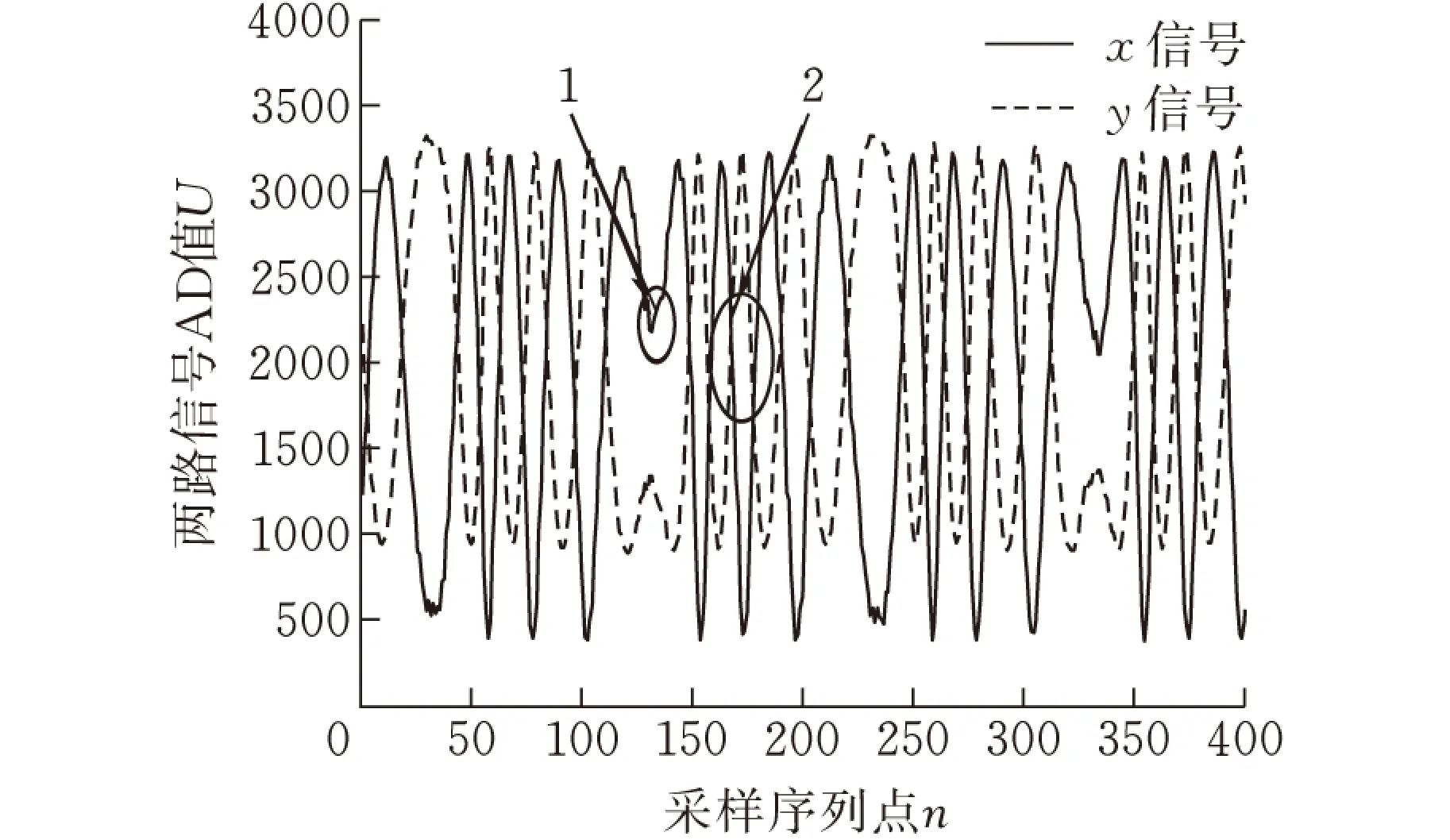
1.懸臂運動至頂峰或者峰谷位置,方向翻折2.懸臂運動到平衡位置,速度最大,信號頻率最大圖3 x、y兩路干涉信號曲線
圖3的信號曲線反映了懸臂的簡諧運動狀態。其中信號頻率高的地方,相位角θ變化快,此時懸臂處于振動平衡位置附近時刻,振動速度大;信號頻率低的地方,相位角θ變化緩慢,此時懸臂處于振動峰點時刻,振動速度小。從圖3中還可以看出,所采集的懸臂振動變化接近4個周期。
圖4給出了兩路信號的Lissajous圖,曲線呈斜橢圓形,其橫坐標和縱坐標分別是兩路信號的12位AD轉換量。同時橢圓線越細,表明干涉條紋光電接收信噪比越高。
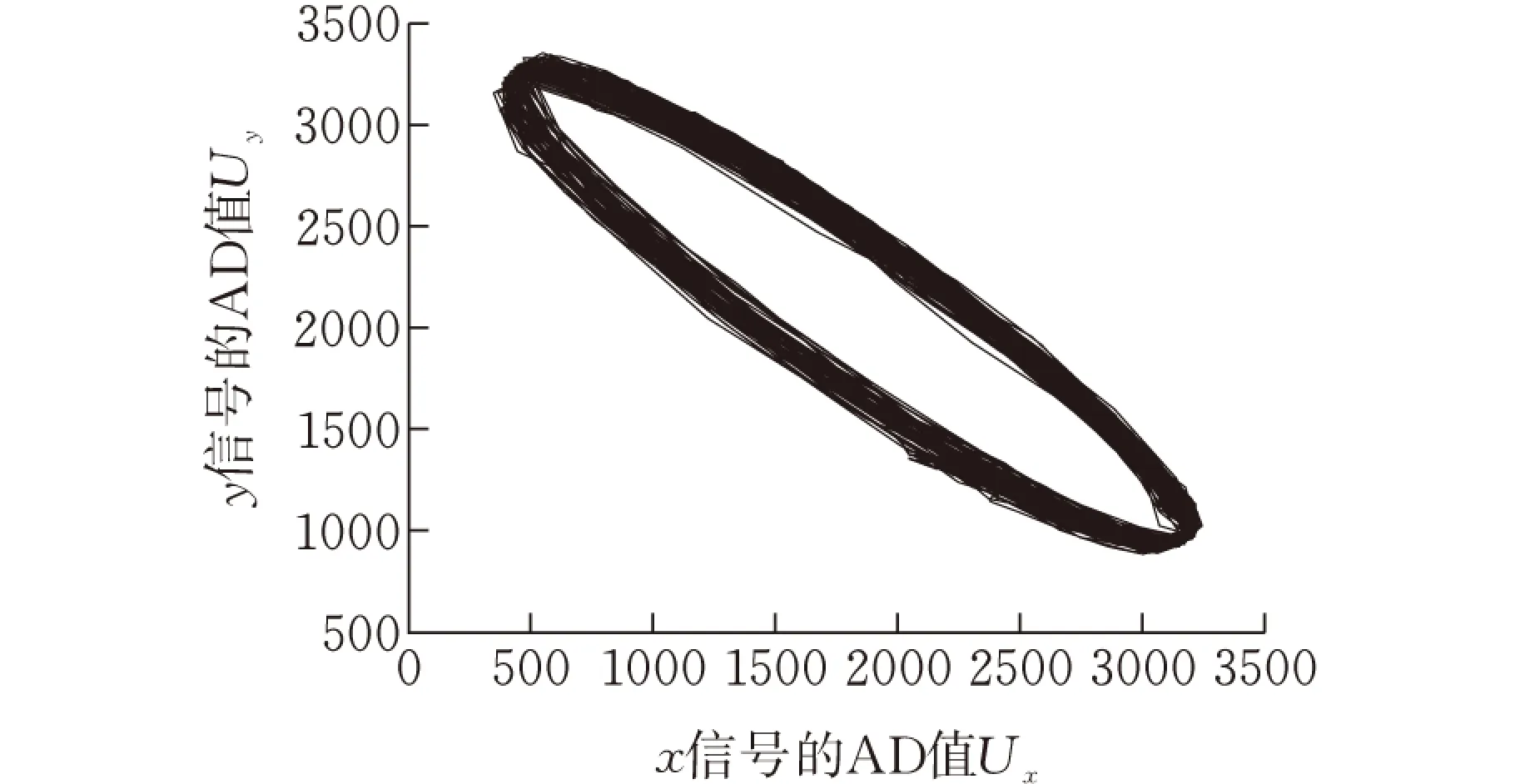
圖4 兩信號的Lissajous圖
2.2橢圓擬合對信號的處理
如何根據兩路干涉信號x、y的值求取懸臂位移s,是干涉信號處理的關鍵。考慮θ正比于s,因此首先計算θ值。根據式(2),要得到θ值就必須事先得到A、B、C1、C2和φ的值。為此,在對式(2)消除參數θ后,可以推出兩路干涉信號滿足橢圓關系。把橢圓參數方程轉換為相應的橢圓直角坐標方程[22],形式如下:
y2+axy+bx2+cy+dx+e=0
(3)
考慮到采樣的x、y兩路干涉信號具有足夠的采樣點,在已知x、y的條件下,式(3)亦可以寫成:
(4)
其中i=1,2,…,n, 這里n為采樣點數;xi、yi為采樣信號序列值。
式(4)顯然是一組多元線性方程組,利用滿足最小二乘的多元線性回歸方法,得到系數a、b、c、d、e。其中這些回歸系數與參數方程的參數A、B、C1、C2和φ之間滿足如下式所示的換算關系[15]:
(5)
值得注意的是,為了使擬合的效果達到最佳,兩路信號的Lissajous圖應至少具有構成一個封閉橢圓的數據量。
2.3相位的計算
在前面擬合與參數換算求解得A、B、C1、C2和φ后,對式(2)中三角函數進行推導計算,得到相位θ的計算表達式:
(6)
式(6)中,在代入每一個采樣序列點xi、yi的基礎上,可以算出相應的sinθi和cosθi,然后應用雙參數反正切函數可以求取θi,這里θi為反正切相位序列值,其中的前400個相位點如圖5所示。

圖5 雙參數反正切相位
由于反正切計算的相位θi是處于(-π,π]之間的包裹相位,并不是真正反映懸臂振動位移的絕對相位量,而代表懸臂實際振動的絕對干涉相位遠遠超出這個限制范圍,因此,在相位超過(-π,π]區間時會發生跳躍,使相位出現不連續的現象,如圖5所示。需要進一步地解包裹銜接算法才能完成對懸臂振動絕對相位的計算。
3相位解包裹算法設計及實驗
3.1解包裹算法
相位解包裹的引入是由于在求相位的過程中引入了反正切函數或者反正弦函數,計算所得到的相位被包裹在(-π,π]之間,為了得到真實的相位分布,需要對這些包裹相位作進一步的處理,這一處理過程稱為“相位解包”。實際干涉相位變化范圍大于一個周期2π,這樣必然在-π~π或π~-π之間存在躍變。解包裹即找出這些躍變點,將被截斷(包裹)的相位連接起來,以得到真實的相位信息[21]。
基于此,算法思想是對雙參數反正切函數得到的相位進行相鄰點相減,判斷相鄰點相位差。當相鄰點相位差大于π或小于-π時,認為是躍變點,利用軟件對跳變點相應增加或者減少2π。
具體方法采用如下三個原則:
(7)
其中,Ωi為第i點解包后的絕對相位,且滿足Ω1=θ1。
3.2懸臂振動位移的復原實驗
利用上述的計算過程,對正弦激勵下的懸臂振動位移進行實測實驗。圖6示出了解包裹計算后的絕對相位Ωi,它與懸臂振動位移量成正比。從圖6中可以看出:解包裹后的相位變化呈現明顯的正弦形,相鄰相位之間不再有跳變的現象。

圖6 解包裹后的相位
考慮到懸臂振動位移與干涉相位之間滿足如下關系:
(8)
代入激光波長λ=650nm,經計算可得到振動位移量。
圖7顯示了微懸臂位移10個峰值點局部區域與10個谷值點局部區域對應的計算結果。

圖7 微懸臂位移峰谷放大圖
懸臂振動位移的峰谷值約為1200nm,相鄰頂峰之間的差距最大約為12nm,相當于最大相位誤差達到0.23rad。結果表明測量的精度很高。
4結論
在設計基于干涉條紋形狀對懸臂角度變化不敏感的干涉光路基礎上,提出了對難以保證正交化的兩路干涉信號進行實時橢圓擬合的方法。根據橢圓擬合與參數換算結果推導出光電信號非正交條件下,懸臂干涉相位變化的計算方法,最后通過解包裹銜接算法還原懸臂振動位移。由于激光干涉儀位移測量以激光波長為標準,在一般工業測量中,不需要對測量系統進行專門的校準驗證,測量結果可信度高,很容易達到納米級精度。在應用該測量方法對某種微懸臂振動位移的測量實驗中,在振動峰峰值為1200nm的條件下,比較了其中10個振動周期內振動位移的幅度,發現峰峰間誤差及谷谷間誤差均小于12nm。
參考文獻:
[1]IshikawaI,SawadaR,HigurashiE,etal.IntegratedMicro-displacementSensorthatMeasuresTiltingAngleandLinearMovementofanExternalMirror[J].SensorsandActuatorsA:Physical, 2007, 138(2):269-275.
[2]HerfstRW,KlopWA,EschenM,etal.SystematicCharacterizationofOpticalBeamDeflectionMeasurementSystemforMicroandNanomechanicalSystems[J].Measurement, 2014, 56(10):104-116.
[3]黃玉波,栗大超,胡小唐,等.測量微懸臂梁曲率的相移顯微干涉法[J].光學精密工程,2007,15(9):1398-1402.
HuangYubo,LiDachao,HuXiaotangetal.CurvatureMeasurementofMicroCantileverBasedonPhase-steppingMicroscopicInterferometry[J].OpticsandPrecisionEngineering,2007,15(9):1398-1402.
[4]唐潔.壓電微懸臂梁傳感技術的研究[D].天津:天津大學,2005.
[5]周雄圖,張永愛,郭太良.SiO2微懸臂梁制備及其高階諧振的傳感器研究[J].光電子激光,2013(11):2055-2059.ZhouXiongtu,ZhangYongai,GuoTailiang.FabricationofSiO2Micro-cantileveranditsSensorApplicationBasedonHigherResonanceModes[J].JournalofOptoelectronics·Laser,2013(11):2055-2059.[6]LiLiyan,WangJian,HanChunyang,etal.IntegrationSingle-frequencyLaserInterferometerUsedtoNanometerMeasurement[J].ChineseJournalofLasers,2011,38(4):0408001-1-5.
[7]XiongLiangcai,ZhouQuansheng,YouWu,etal.NewLaserExcitationMethodforModalAnalysisofMicrostructure[J].MechanicalSystemsandSignalProcessing, 2015, 50:227-234.
[8]袁群, 高志山, 李建欣,等. 基于π/4相移平均的多光束干涉相位提取算法[J]. 光學學報,2011,31(11):140-145.
YuanQun,GaoZhishan,LiJianxin,etal.PhaseExtractionAlgorithmsofMulti-beamInterferenceBasedonPhase-shiftingAveraging[J].ActaOpticaSinica,2011,31(11):140-145.
[9]黃強輝,曹益平,張可雄,等.基于四象限探測器檢測干涉條紋正交信號[J].強激光和粒子束,2008,20(8):1253-1256.
HuangQianghui,CaoYiping,ZhangKexiong,etal.DetectingOrthogonalSignalsofInterferenceFringesBasedonFourQuadrantDetector[J].HighPowerLaserandParticleBeams,2008,20(8):1253-1256.
[10]周浩,王選擇,翟中生,等.基于圓形四象限光電探測器的條紋形狀識別方法研究[J].中國激光,2012,39(7):0708002-1-7.
ZhouHao,WangXuanze,ZhaiZhongsheng,etal.ResearchonFringeShapeRecognitionMethodsBasedonCircularFour-quadrantPhotoelectricDetect[J].ChineseJournalofLasers,2012,39(7):0708002-1-7.
[11]黃強輝,曹益平.采用四象限探測器檢測干涉條紋正交信號的新方法[J].中國激光,2009,36(5):1166-1170.
HuangQianghui,CaoYiping.NewMethodforDetectingOrthogonalSignalsofLaserInterferenceFringesUsingFour-quadrantDetector[J].ChineseJournalofLasers,2009,36(5):1166-1170.
[12]KakumaS,HoshiiJ,TakahashiN,etal.PrecisionLengthChangeFollowedbyDynamicDetectionoftheLaserFrequencyLockedtoInterferenceFringe[C]//18thCongressoftheInternationalCommissionforOptics.SanFrancisco, 1999:643.
[13]GeZT,TakedaM.High-resolutionTwo-dimensionalAngleMeasurementTechniqueBasedonFringeAnalysis[J].AppliedOptics,2003,42(34):6859-6868.
[14]彭東林,付敏,朱革,等. 一種光強正交調制的新型線性位移傳感器研究[J]. 光學學報,2014,34(12):1212007.
PengDonglin,FuMin,ZhuGe,etal.StudyonaNovelLinearDisplacementSensorBasedontheOrthogonalModulatingLightIntensity[J].ActaOpticaSinica, 2014, 34(12): 1212007.
[15]陳家鳳,陳海清.基于小波變換的加權最小二乘相位解纏算法[J].光電子激光,2008(4):514-517
ChenJiafeng,ChenHaiqing.WeightedLeastSquaresPhaseUnwrappingAlgorithmBasedonMultiresolutionWaveletTransform[J].JournalofOptoelectronics·Laser,2008(4):514-517.
[16]王選擇.正交衍射光柵計量原理及在超精密工作臺上的應用[D].武漢:華中科技大學,2004.
[17]涂勇,鐘金鋼.一種應用于動態數字全息的快速相位解包裹算法[J].光電子激光,2012(1):148-153.
TuYong,ZhongJingang.AMethodforFastPhaseUnwrappinginDynamicDigitalHolography[J].JournalofOptoelectronics·Laser,2012(1):148-153.
[18]李國棟,韋春龍,于瀛潔,等.圓形域干涉圖中的相位解包裹[J].光學精密工程,2000,8(5):473-477.
LiGuodong,WeiChunlong,YuYinjie,etal.Phase-unwrappingforInterferogramswithCircleField[J].OpticsandPrecisionEngineering,2000,8(5):473-477.
[19]WangXin,DaFeipeng.PhaseUnwrappingAlgorithmUsingInterlacedFringefor3DShapeMeasurement[J].JournalofOptoelectronics·Laser,2011,22(2):249-255.
[20]朱勇建,李安虎,潘衛清,等.結構光測量中快速相位解包裹算法的討論[J].光子學報,2009,38(1):184-188.
ZhuYongjian,LiAnhu,PanWeiqing,etal.FastPhase-unwrappingAlgorithmsUsedforStructural-lightMeasurement[J].ActaPhotonicaSinica,2009,38(1):184-188.
[21]卓靜一,孔令講,周建華,等. 一種液晶相控陣中基于迭代的相位恢復算法[J]. 光學學報, 2014, 34(5): 0505001.
ZhuoJingyi,KongLingjiang,ZhouJianhua,etal.AnIteration-basedPhaseRetrievalAlgorithminLiquid-crystalPhasedArray[J].ActaOpticaSinica, 2014, 34(5): 0505001.
[22]王選擇,翟中生,鐘毓寧,等.應用動態調制與干涉條紋形狀測量二維角度[J].光學精密工程,2014,22(2):274-279.
WangXuanze,ZhaiZhongsheng,ZhongYuning,etal.MeasurementofTwo-dimensionalAngleUsingDynamicModulationandInterferenceFringeShape[J].OpticsandPrecisionEngineering,2014,22(2):274-279.
(編輯王艷麗)
AProcessingAlgorithmofNon-orthogonalSignalsforMicro-cantileverVibrationInterferometryMeasurement
WangXuanzeKongDejingZhaiZhongsheng
HubeiUniversityofTechnology,Wuhan,430068
Abstract:This paper designed interference measurement system which the stripe shape was less sensitive to cantilever’s changing angles. Then analysing the characteristics of two-photoelectric receiving interference signals which were difficult to guarantee orthogonalization, a real-time ellipse fitting method was proposed. Using the ellipse fitting method and the conversion results, the theoretical formula of interference fringe phase change could be derived. Finally, according to the relationship between the phase and vibration displacement, and the property of vibration displacement’s continuity, vibration displacement quantity could be obtained by using unwrapping algorithm. The results show that this method can achieve measurement level of interference precision order without additional hardware processing circuit wnder the conditions of the sufficient sampling frequency.
Key words:measurement; micro cantilever; phase-difference; ellipse fitting; phase unwrapping
收稿日期:2015-04-28
基金項目:國家自然科學基金資助項目(51175154, 51275157, 51275158);天津大學精密測試技術及儀器國家重點實驗室開放基金資助項目(PIL1209)
中圖分類號:TH744.3
DOI:10.3969/j.issn.1004-132X.2016.04.004
作者簡介:王選擇,男,1971年生.湖北工業大學機械工程學院教授。孔德靖,男,1991年生。湖北工業大學機械工程學院碩士研究生。翟中生,男,1978年生。湖北工業大學機械工程學院副教授、博士。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
