鉗夾車并聯起升機構分析與電液稱重實驗研究
2016-06-23 03:20:23趙延治王向南任玉波白學剛魏鴻亮
中國機械工程 2016年4期
趙延治 王向南 任玉波 白學剛 付 勇 魏鴻亮
1.燕山大學河北省并聯機器人與機電系統重點實驗室,秦皇島,066004
鉗夾車并聯起升機構分析與電液稱重實驗研究
趙延治1王向南1任玉波1白學剛1付勇2魏鴻亮2
1.燕山大學河北省并聯機器人與機電系統重點實驗室,秦皇島,066004
2.齊齊哈爾軌道交通裝備有限責任公司,齊齊哈爾,161002
摘要:為解決長大貨物鐵路運輸鉗夾車自身精確稱重問題,基于空間閉環機構自由度計算公式,對鉗夾車并聯起升機構進行了機構自由度分析,基于坐標變換法對鉗夾車并聯起升機構進行了運動學分析,建立了貨物起升位置與壓柱油缸輸入映射模型,得到了起升機構速度傳遞雅可比矩陣,結合系統靜力平衡方程,建立了壓柱油缸起升力與貨物質量間力映射模型。分別針對鉗形梁結構變形和壓柱油缸摩擦對并聯起升機構稱重精度的影響進行了分析計算,在此基礎上,設計并研制了鉗夾車并聯起升機構樣機及其電液稱重實驗系統,開展了基于摩擦補償的鉗夾車電液稱重實驗研究,提高了鉗夾車電液稱重精度。
關鍵詞:長大貨物;鉗夾車;并聯起升機構;電液稱重
0引言
特長和特重型貨物如發電機定子、大型變壓器、軋機牌坊、大型軍事裝備等大型特殊貨物無法用一般的鐵路貨車來裝運,必需使用專門的長大貨物車。鉗夾車正是運輸長大特種貨物的鐵路貨車之一。鉗夾車由兩個半車組成,有空載短連掛與重載長連掛兩種連接方式。
鐵路貨物運輸鉗夾車最早出現在德國,我國從20世紀50年代開始引入,多年來研究人員對其開展了相關研究工作。張祥杰[1]、王去鵬[2]對鉗夾車進行了剛柔耦合仿真分析及動態穩定性與動載荷分析;范國海等[3]對DQ35型鉗夾車進行了車體性能仿真及驗證;楊新[4]對鉗夾車等分撐桿及其支座進行了受力分析與強度計算;趙承壽等[5]探討了D35型鉗夾車減輕自重的方法;兆文忠等[6]針對舉升機構,研究了D38型鉗夾車液壓舉升系統;魏鴻亮等[7]介紹了DQ45型鉗夾車的研制過程;王子長等[8]分析設計了450t鉗夾車液壓系統;萬朝燕等[9]分析了DQ35型鉗夾車壓柱油缸保持穩定的條件。以上研究從不同角度對鉗夾車各相關問題進行了分析,但多年來一直缺乏從機構學理論出發,對鉗夾車整體起升機構進行系統的建模與分析。
由于鉗夾車自重及負載超大,所以運行時對運輸沿線橋梁、涵洞及其路軌帶來嚴峻考驗。因此,長大貨物在運輸前進行精確稱重對保證運輸過程的安全性具有重要意義。我國生產的D38型鉗夾車通過壓柱油缸起升貨物,并通過壓柱油缸稱重,由于受起升機構中各連接鉸及油缸內壁的摩擦力和結構變形等因素的影響,導致稱重精度并不高,這給保障鐵路安全運輸帶來挑戰。目前,對其進行精確電液稱重的研究較少。
本文在完成鉗夾車整體并聯起升機構建模分析的基礎上,對其電液稱重技術進行了研究,分析了鉗夾梁變形和壓柱油缸摩擦力對稱重精度的影響,建立了基于壓柱油缸摩擦補償的稱重數學模型,研制了鉗夾車并聯起升機構樣機與電液稱重實驗系統。
1起升機構建模分析
1.1機構自由度分析
鉗夾車整體起升機構可等價為一空間雙層并聯閉環機構,其簡化機構模型如圖1所示,其中,1、7、10、15為四個鉗夾梁,2、6、11、14為四個壓柱油缸,3、5、12、13為四個掛貨鉤,4為長大貨物。鉗夾車起升貨物時,先調定鉗夾寬度與高度,然后將兩個鉗夾梁與貨物連接成一個整體,若同側壓柱油缸動作一致,則在進行機構運動學建模時,可將該機構簡化成平面并聯閉環機構。
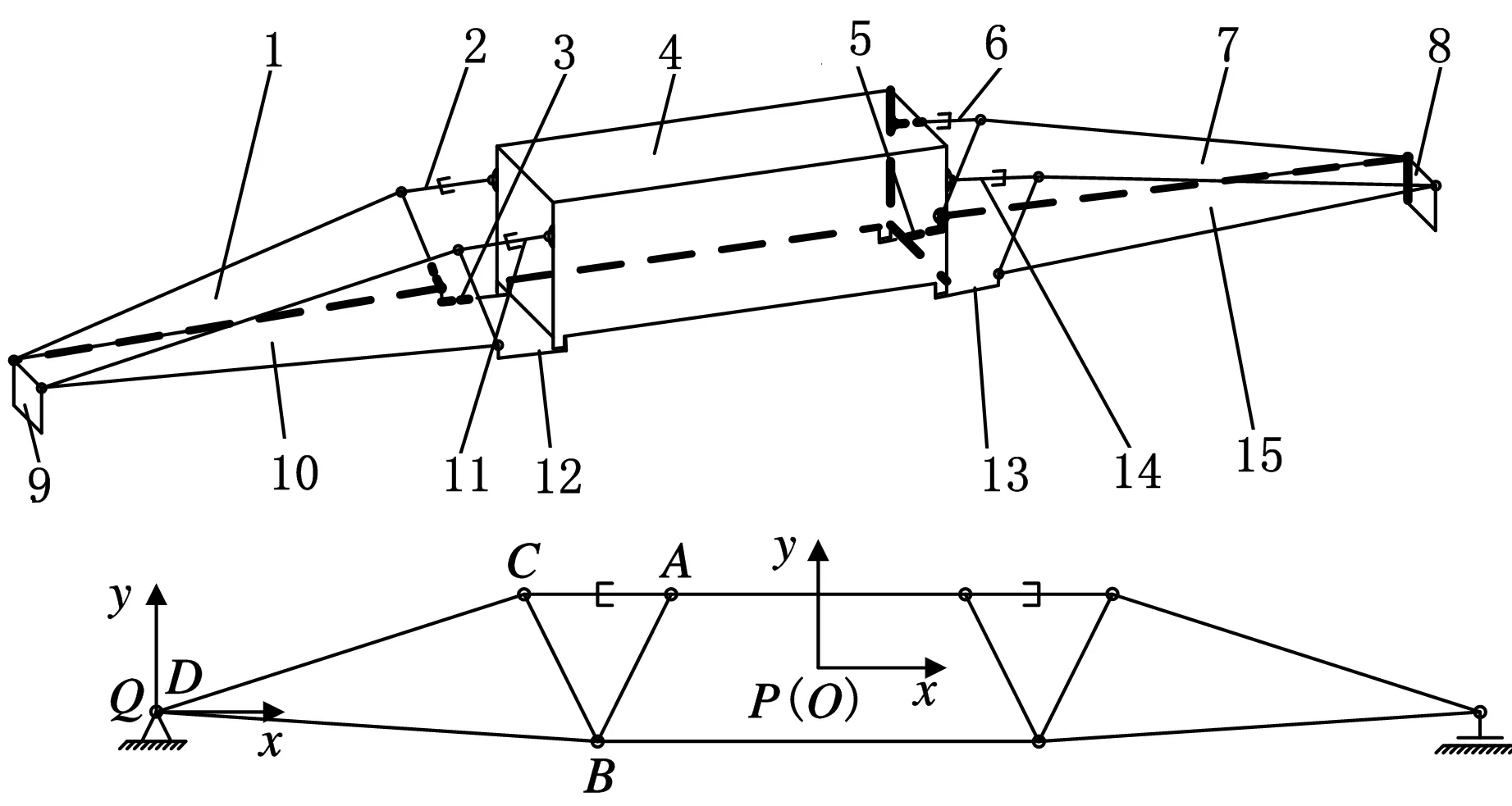
圖1 鉗夾車起升機構結構簡圖
由空間并聯閉環機構自由度計算公式[10]計算可得該并聯起升機構自由度為2,即貨物在豎直平面內存在兩個自由度,但在使用過程中要求各壓柱油缸同步伸縮以保證貨物起升平穩,這實質上是限制了貨物的一個自由度,因此實際情況中貨物僅存在一個平動自由度[10]。
1.2起升位置與油缸輸入映射模型
由于起升機構左右對稱且兩側油缸同步伸長,故取左半部分為研究對象,建立與貨物中心固連的坐標系{P},則貨物各鉸鏈點在{P}中的坐標表示為:A(-a,b,0);B(-c,-b,0)。
建立與左側鉗夾梁D點固連的坐標系{Q},則鉗夾梁各鉸鏈點在{Q}中坐標表示為:B(f,-g,0);C(h,i,0)。
建立與地面固連的坐標系{O},設其與坐標系{P}的初始位置重合,則D點坐標為:D(-d,-e,0)。
以上各參數中,a為鉸鏈點A與貨物中心的水平距離;b為鉸鏈點A與貨物中心的豎直距離;c為鉸鏈點B與貨物中心的水平距離;d為鉸鏈點D與{O}原點O的水平距離;e為鉸鏈點D與{O}原點O的豎直距離;f為鉸鏈點B與D的水平距離;g為鉸鏈點B與D的豎直距離;h為鉸鏈點C與D的水平距離;i為鉸鏈點C與D的豎直距離。
則坐標系{P}相對坐標系{O}發生移動后的變換矩陣為
式中,x、y為貨物中心的位移。
坐標系{Q}相對坐標系{O}發生轉動后的變換矩陣為
式中,α為鉗形梁的轉角。
通過坐標變換,將各鉸鏈點坐標統一到{O}中,則坐標系{P}中A、B點在定坐標系{O}中的表示為:A′(-a+x,b+y,0);B′(-c+x,-b+y,0)。坐標系{Q}中B、C點在坐標系{O}中的表示為:B′(fcosα+gsinα-d,-gcosα+fsinα-e,0);C′(hcosα-isinα-d,icosα+hsinα-e,0)。由距離公式
(1)

(2)
由式(2)可計算得到壓柱油缸的伸縮變化量ΔlAC為
(3)

求得貨物起升高度y與壓柱油缸伸縮量ΔlAC之間的函數關系式如下:
ΔlAC=[(-a+X-hC+iS+d)2+
S=sinα=(gd+fe+fy-f b+
gX-gc)/(f2+g2)
C=cosα=(fd-ge+gb-
gy+fX-fc)/(f2+g2)
繪制出的壓柱油缸伸長量即輸入與貨物水平、垂直位置的映射關系曲線如圖2所示。
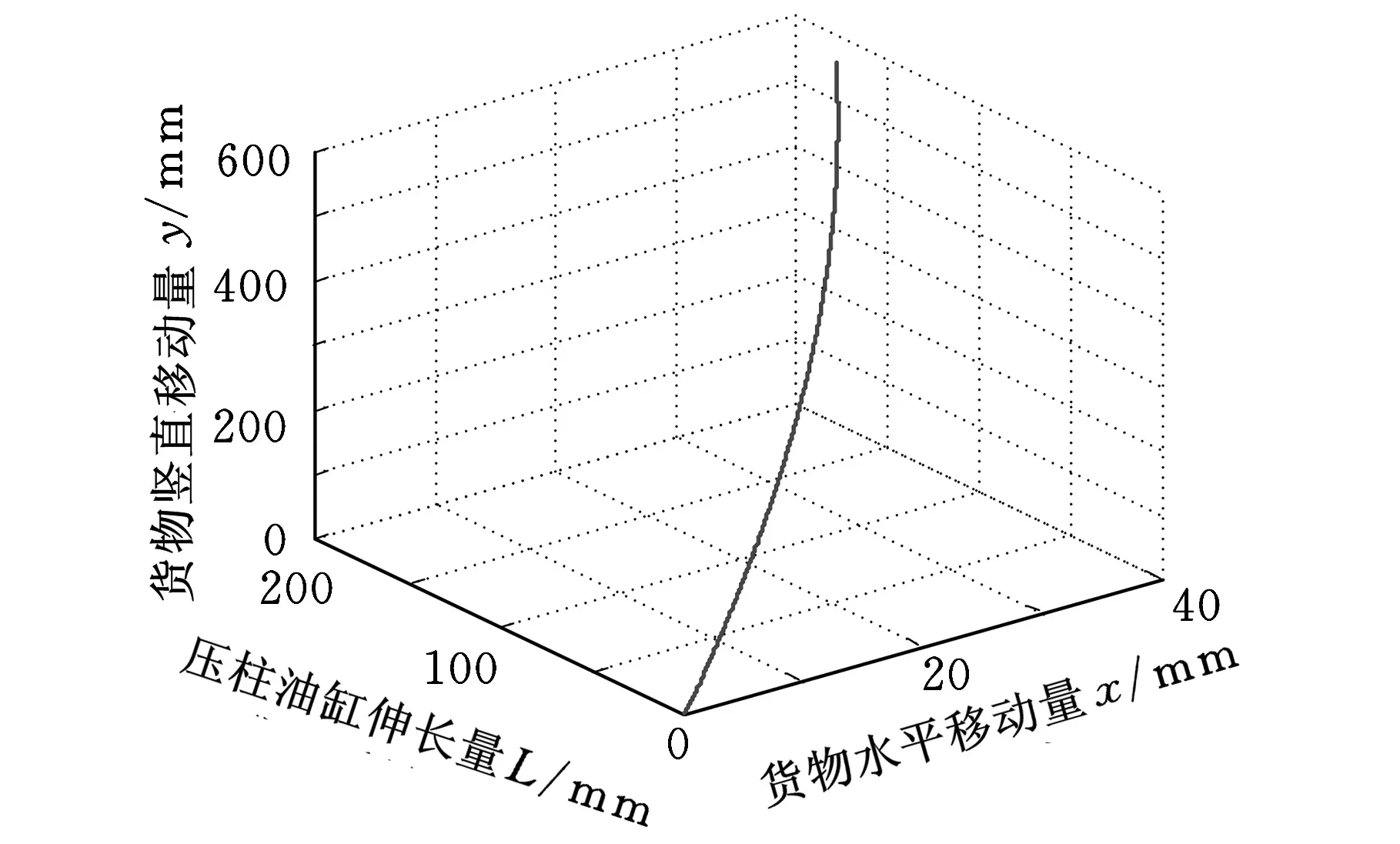
圖2 位置映射關系
1.3起升機構輸入輸出速度映射
由上述起升機構位置映射關系可求得該并聯機構的一階影響系數矩陣,即起升機構輸入輸出速度映射模型為
G=[S1S2]
則該并聯起升機構運動學速度映射關系為
(4)
式中,V為貨物起升速度;S1為左側分支一階影響系數;S2為右側分支一階影響系數;v1為左側壓柱油缸伸長速度;v2為右側壓柱油缸伸長速度。
繪制起升過程中不同起升高度下壓柱油缸伸出速度與貨物起升速度的映射關系如圖3所示。
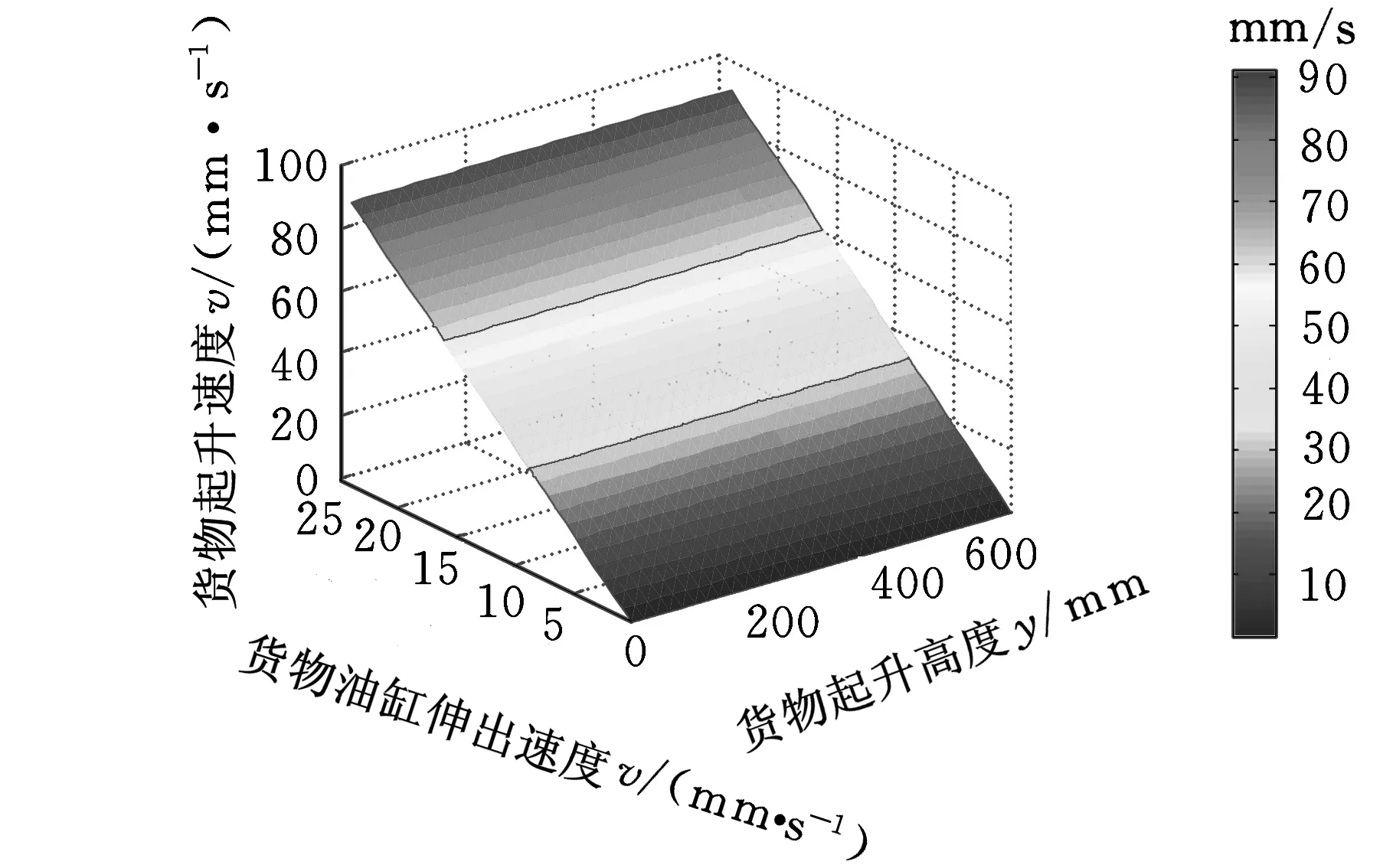
圖3 運動學速度映射關系
1.4油缸起升力與貨物質量映射
對機構的速度雅可比矩陣進行轉置,可得起升機構的力雅可比矩陣:
J=GT
則壓柱油缸推力F與貨物質量M之間的關系式如下:
(5)
式中,M為貨物質量;g為重力加速度;F1為左側壓柱油缸起升力;F2為右側壓柱油缸起升力。
起升過程中壓柱油缸起升力與貨物質量的映射關系如圖4所示。
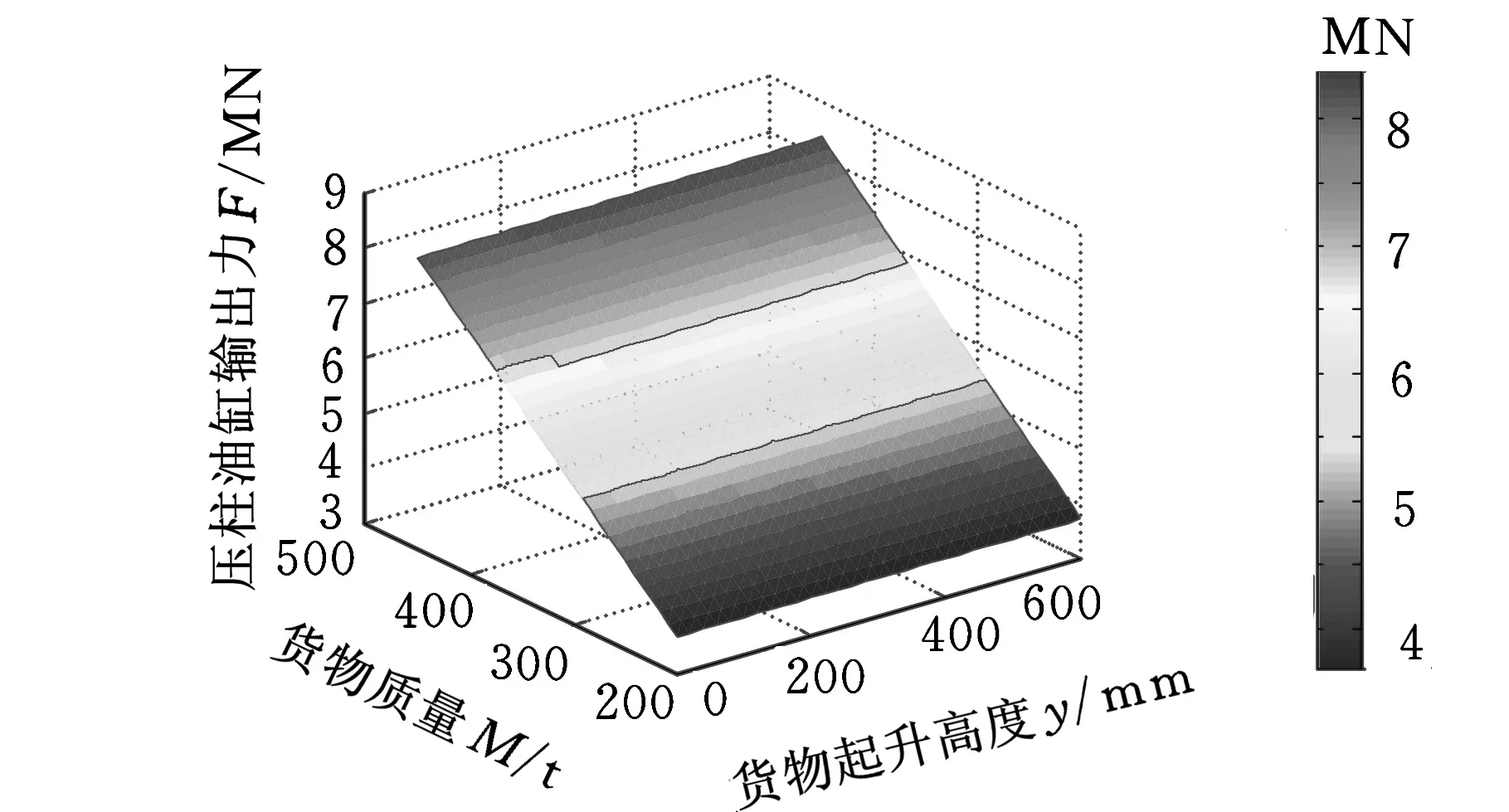
圖4 起升機構力映射關系
2機構稱重精度影響因素分析
2.1鉗夾梁變形分析
鉗形梁大部分采用屈服強度為685 MPa的WEL-TEN780A高強度可焊結構鋼。本文運用RecurDyn多體動力學分析軟件,將鉗夾梁柔性化,再聯合其他構件進行起升機構的剛柔耦合仿真,分析得到鉗夾梁變形對稱重精度的影響。剛柔耦合模型及結果云圖見圖5。
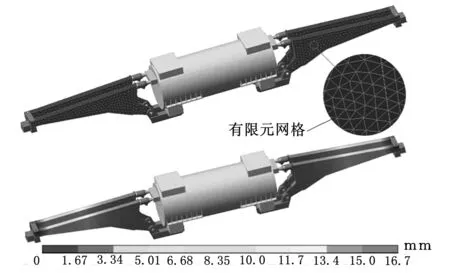
圖5 剛柔耦合仿真模型及結果云圖
設置壓柱油缸伸長速度和起升時間,對不同質量的貨物進行多次仿真,測量鉗夾梁B點和C點的位置變化,得到考慮變形后起升機構實際力雅可比矩陣,進而推算得出考慮鉗夾梁結構變形的貨物質量,結合貨物實際質量,得到由于鉗夾梁結構變形引起的稱重相對誤差關系曲線見圖6和圖7。
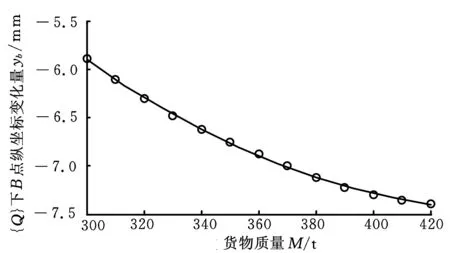
(a){Q}坐標系下B點縱坐標變化量
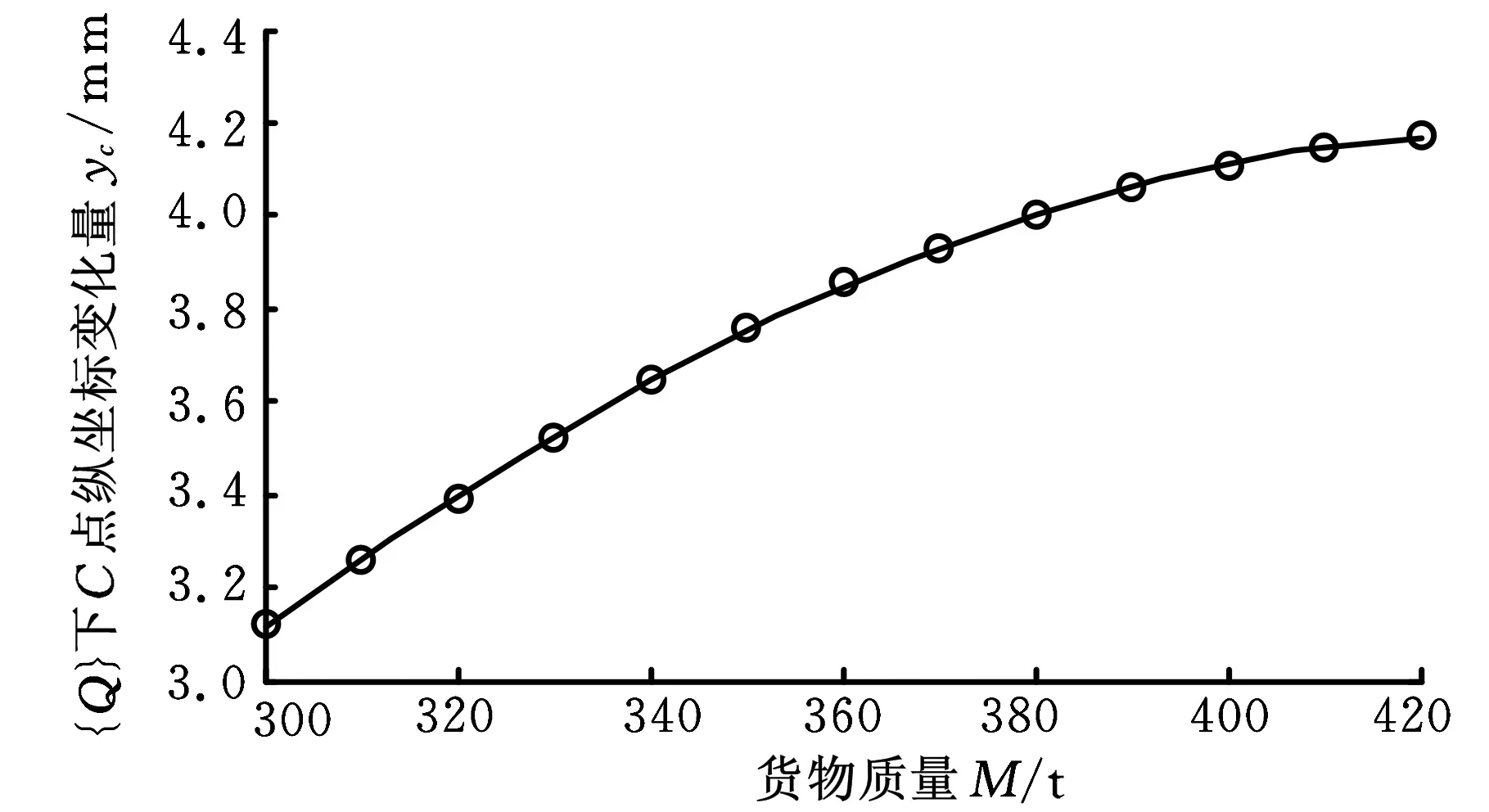
(b){Q}坐標系下C點縱坐標變化量圖6 {Q}坐標系下B點和C點的位置改變情況
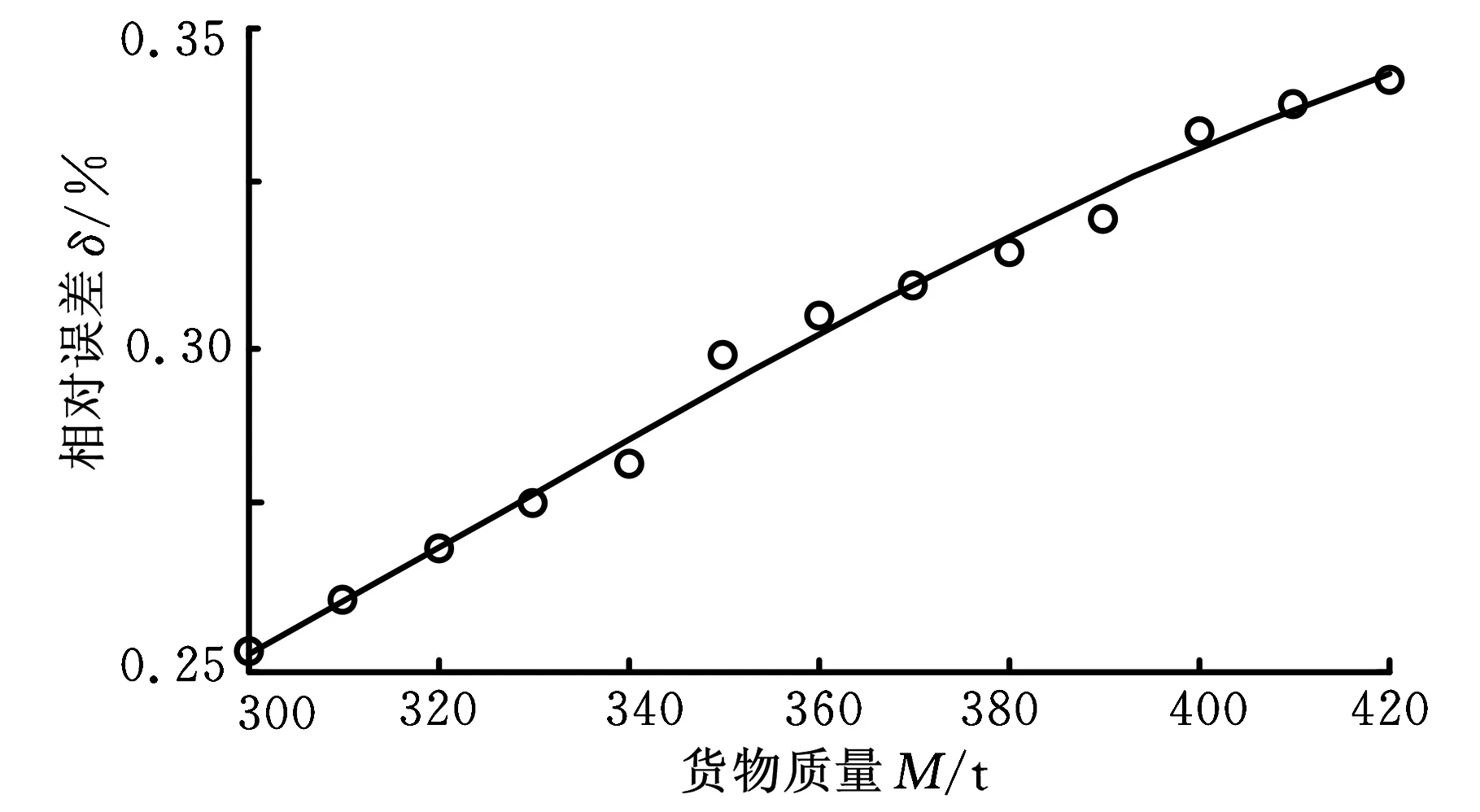
圖7 相對誤差曲線
圖7所示為在鉗形梁變形的影響下,不同質量貨物的稱重誤差,由圖7可知,貨物質量從300 t逐漸增加到420 t,由于鉗形梁變形引起的稱重計算誤差由0.25%逐漸增大到0.35%,可知由于鉗夾梁結構變形的加大,導致稱重精度誤差也逐步增大,但總體上鉗夾梁結構變形對稱重精度的影響不大。
2.2壓柱油缸摩擦力影響
液壓缸內,密封圈與缸內壁間的正壓力由兩部分組成:密封圈裝入液壓缸缸體受壓縮引起的徑向應力,及充入油液對其軸向推力引起的徑向應力,兩者之和與摩擦因數的乘積就是密封圈與液壓缸缸內壁間的軸向摩擦力。
活塞相對缸體處于靜態時,密封圈與缸內壁接觸摩擦力可表示為
f0=F2+T=
(6)
式中,F2、T為活塞及活塞桿密封圈與缸內壁的摩擦力;D1、D2為活塞及活塞桿的外徑;d1、d2為活塞及活塞桿上密封圈的截面直徑;μ、E為密封圈材質泊松比及彈性模量;e1、e2為活塞及活塞桿上密封圈的壓縮率;pM、pN為液壓缸大小腔液壓壓力;j、k為活塞及活塞桿上的密封圈數量;f為密封圈與缸內壁接觸摩擦因數[11]。
在ReCurDyn軟件中將式(6)求得的摩擦力加于壓柱油缸仿真模型上,設置好各個運動副摩擦參數,通過仿真得到壓柱油缸的輸出力,當貨物質量為380 t,計算得到貨物質量為403.82 t,由于壓柱油缸摩擦力引起的稱重相對誤差:
可以看到,相對于鉗夾梁結構變形,鉗夾車壓柱油缸摩擦對稱重精度的影響較大。
3基于摩擦補償的電液稱重實驗
3.1起升機構樣機和電液稱重實驗系統
在完成上述理論建模與仿真計算分析的基礎上,設計研制了鉗夾車起升機構樣機和由傳感器、液壓站及信號采集與處理系統組成的鉗夾車起升電液稱重實驗系統。
鉗夾車起升機構樣機主要組成部分有:兩個底架1、四個旁承油缸2、兩個分蓋板3、四個鉗形梁4、四個壓柱油缸5、一個貨物6、四個連接鉸7、四個拉線傳感器8、四個掛貨鉤9、兩個心盤10、四個傾角傳感器11。本文設計及研制的鉗夾車起升機構樣機分別如圖8和圖9所示。
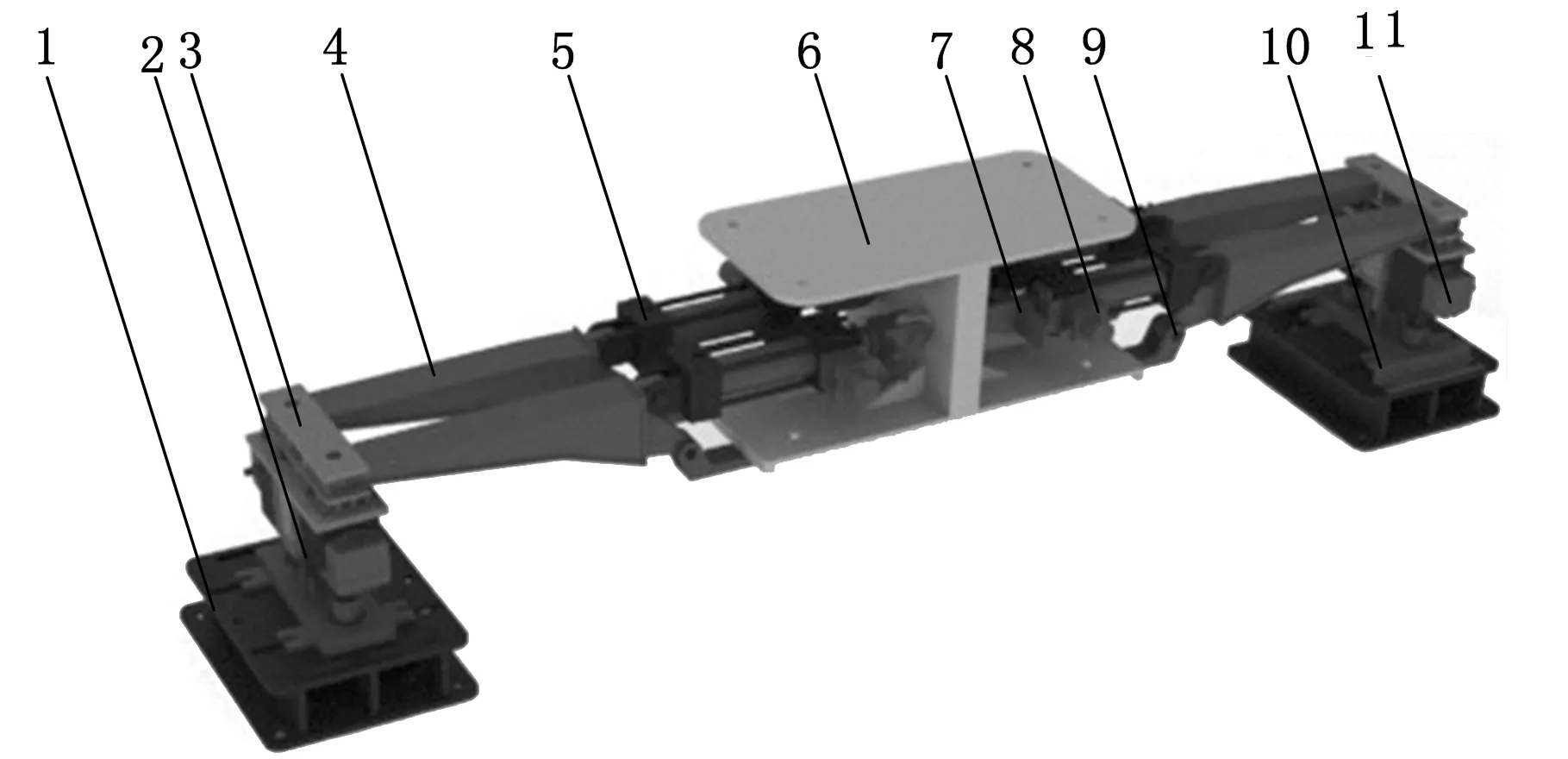
圖8 起升機構樣機設計效果圖
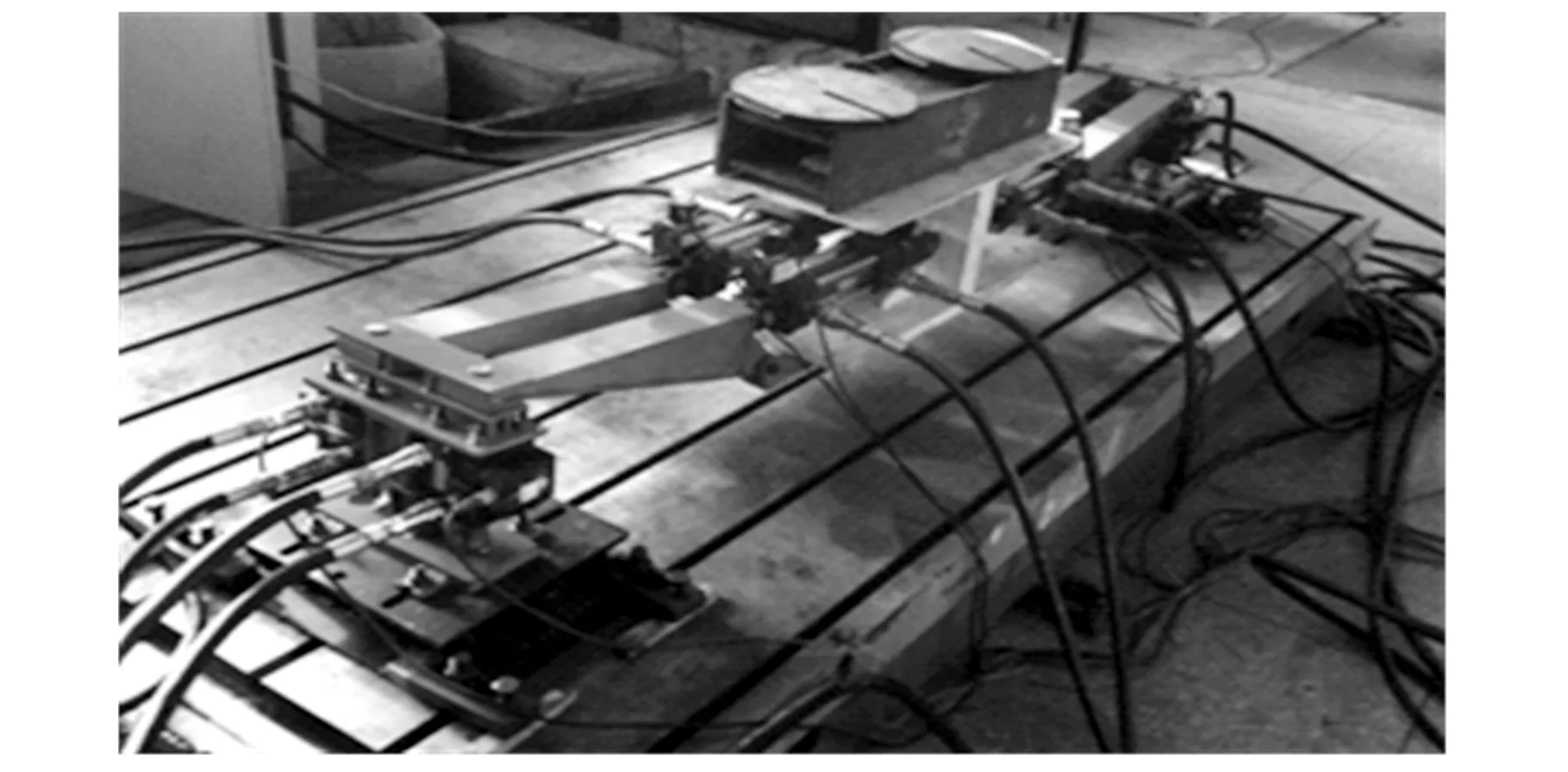
圖9 起升機構樣機
傾角傳感器安裝于旁承油缸上,用于檢測旁承油缸與水平面的夾角;拉線傳感器安裝于壓柱油缸上,用于測量壓柱油缸伸長量并保證其伸縮同步性,液體壓力傳感器用于測量壓柱油缸內的液體壓力。
3.2基于摩擦補償的電液稱重實驗
基于壓柱油缸的油壓檢測,通過貨物質量與壓柱油缸輸出力間關系求解貨物質量,再與實驗所得數據進行比較,得到系統稱重精度。實驗方案設置如下:
(1)對實驗設備進行初始位置的調定,找到傳感器的相對零位和貨物的初始高度。
(2)測出所有零件的質量和各轉動中心點在垂直面間的連線距離、壓柱油缸原始長度。
(3)調定液壓系統的壓力和流量,使液壓缸動作速度盡量小,設定系統最大壓力。
(4)旁承油缸收縮,壓柱油缸動作,使貨物起升到一定高度,記錄壓柱油缸壓力數值、拉線傳感器數值。
(5)使設備回歸原位,卸荷,增加貨物重量再起升至相同高度,記錄數值。
將壓柱油缸的當量輸出推力代入式(6)中,可得到所測質量。數據及處理結果如表1所示。
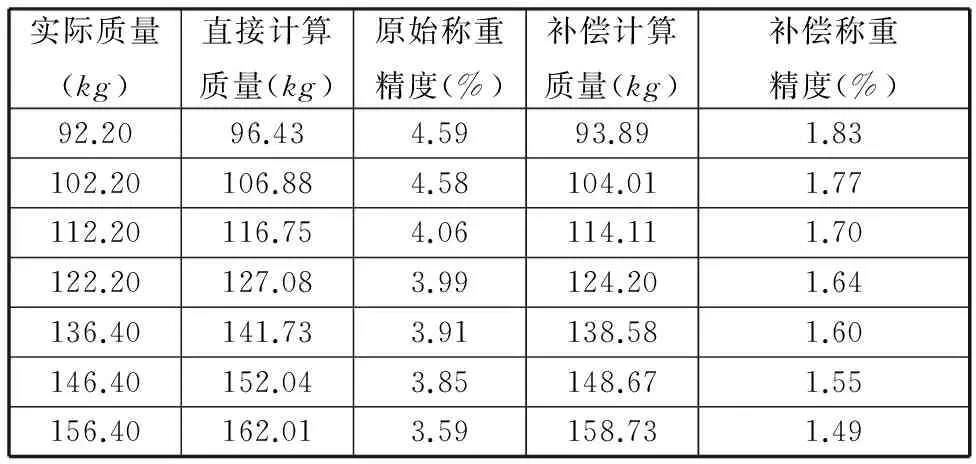
表1 電液稱重實驗數據
表1中,“直接計算質量”為不進行摩擦補償,直接利用油液壓力計算壓柱油缸推力,再根據機構幾何關系求得的貨物質量;“補償計算質量”為在進行油缸推力計算的時候進行摩擦補償,再根據機構幾何關系求得的貨物質量。
通過表1可知,若不考慮油缸摩擦,所測貨物質量的精度從3.59%到4.59%,若采用基于摩擦補償的稱重測量方法,其測量精度從1.49%到1.83%,精度有明顯提高。
4結論
本文對鉗夾車起升空間并聯閉環機構進行了機構學分析,得到了運動及力輸入輸出映射關系,并針對不同因素對稱重精度的影響進行了分析。在此基礎上,研制了鉗夾車起升機構樣機與電液稱重實驗系統,開展了基于摩擦補償的鉗夾車電液稱重實驗研究,基于壓柱油缸摩擦模型修正了鉗夾車并聯起升機構電液稱重映射模型,提高了其電液稱重精度。
參考文獻:
[1]張祥杰.450噸鉗夾車剛柔耦合動態仿真[D].大連:大連交通大學,2009.
[2]王去鵬.長大貨車動態穩定性與動載荷分析[D].大連:大連交通大學,2008.
[3]范國海,關曉麗, 王文,等.DQ35型鉗夾車車體性能仿真及驗證[J]. 鐵道車輛,2008,46(3):1-6.
FanGuohai,GuanXiaoli,WangWen.VehiclePerformanceSimulationandValidationofDQ35SchnabelCar[J].RailwayVehicles,2008,46(3):1-6.
[4]楊新. 關于D35型32軸鉗夾車等分撐桿及其支座的受力分析與強度計算[J]. 鐵道車輛,1993,31(8):15-21.
YangXin.TheForceandStrengthofBisectingBarsandSupportofD35SchnableCar[J].Railwayvehicles, 1993,31(8):15-21.
[5]趙承壽,于連友.D35型32軸鉗夾車減輕自重的可行性研究[J]. 貨物列車,1994(3):1-5.
ZhaoChengshou,YuLianyou.FeasibilityStudyonWeightReducingofD35SchnabelCar[J].Freighttrain, 1994(3):1-5.
[6]兆文忠,邵建義,于連友.380噸新型鉗夾車液壓舉升系統分析[J].大連鐵道學院學報,1997,18(2):49-54.
ZhaoWenzhong,ShaoJianyi,YuLianyou.HydraulicLiftingSystemAnalysisof380TonsSchnabelCar[J].JournalofDalianRailwayInstitute,1997,18(2):49-54.
[7]魏鴻亮.DQ45型鉗夾車的研制[J]. 鐵道車輛, 2011, 49(10): 17-20.
WeiHongliang.TheManufactureofDQ45SchnabelCar[J].RailwayVehicles,2011,49(10):17-20.
[8]王子長, 魏鴻亮. 450t鉗夾式或車液壓系統設計[J]. 大連交通大學學報, 2013, 34(3):119-120.
WangZichang,WeiHongliang.DesignoftheHydraulicSystemof450tTypeorSchnabelCar[J].JournalofDalianJiaotongUniversity,2013,34(3):119-120.
[9]萬朝燕,樸明偉,兆文忠,等.350噸鉗夾車壓柱油缸穩定性分析[J].大連交通大學學報,2008,29(5):27-33.
WanZhaoyan,PuMingwei,ZhaoWenzong.StabilityAnalysisofPressCylinderof350TonsSchnableCar[J].JournalofDalianJiaotongUniversity,2008,29(5):27-33.
[10]黃真,趙永生,趙鐵石.高等空間機構學[M].北京:高等教育出版社,2006.
[11]肖士珩. 液壓缸內O型密封圈產生的摩擦力的計算[J]. 南方冶金學院學報, 2001, 22(1):18-20.
XiaoShiyan.HydraulicCylinderO-ringsFrictionCalculation[J].JournalofSouthernInstituteofMetallurgy, 2001, 22(1):18-20.
(編輯王艷麗)
AnalysesofSchnabelCar’sParallelLiftingMechanismandExperimentalResearchonElectro-hydraulicWeighing
ZhaoYanzhi1WangXiangnan1RenYubo1BaiXuegang1FuYong2WeiHongliang2
1.HebeiProvincialKeyLaboratoryofParallelRobotandMechatronicSystem,YanshanUniversity,Qinhuangdao,Hebei,0660042.QiqihaerRailTrafficEquipmentLimitedLiabilityCompany,Qiqihaer,Heilongjiang,161002
Abstract:In order to solve the precise weighing problem of long-heavy cargo railway transportation schnabel car,the freedom of the parallel lifting mechanism was analyzed based on spatial closed loop.The coordinate transformation method of kinematic analysis was performed on schnabel car lifting mechanism,and the mapping model between lifting track of cargo and protrudent length of cylinder was established,the promotion mechanism of Jacobian transfer matrix system was obtained.Combined with the static equilibrium equation,the mapping model between output pressure of cylinder and mass of cargo was established.The influences of structural deformation and cylinder friction on the parallel lifting mechanism weighing precision were analyzed and calculated;then the prototype of the schnabel car parallel lifting mechanism and its electro-hydraulic weighing test system were designed and developed.The experimental study on electro-hydraulic weighing was carried out based on friction compensation of schnabel car,and the weighting precision of schnable car is improved.
Key words:long-heavy cargo;schnabel car;parallel lifting mechanism;electro-hydraulic weighing
收稿日期:2015-03-06
基金項目:國家自然科學基金資助項目(51105322);河北省自然科學基金資助項目(E2014203176);河北省高等學校自然科學研究青年基金資助項目(QN2015040)
中圖分類號:TH112
DOI:10.3969/j.issn.1004-132X.2016.04.005
作者簡介:趙延治,男,1981年生。燕山大學機械工程學院副教授。主要研究方向為并聯多維力傳感器、并聯機構學。發表論文20余篇。王向南,男,1989年生。燕山大學機械工程學院碩士研究生。任玉波,女,1963年生。燕山大學機械工程學院副教授。白學剛,男,1986年生。燕山大學機械工程學院碩士研究生。付勇,男,1970年生。齊齊哈爾軌道交通裝備有限責任公司教授級高級工程師。魏鴻亮,男,1969年生。齊齊哈爾軌道交通裝備有限責任公司教授級高級工程師。
