一種獨輪車機器人的動力學建模及俯仰平衡控制
2016-06-23 03:20:25劉成舉何淑通
中國機械工程 2016年4期
莊 未 劉成舉 江 漢 何淑通
桂林電子科技大學,桂林,541004
一種獨輪車機器人的動力學建模及俯仰平衡控制
莊未劉成舉江漢何淑通
桂林電子科技大學,桂林,541004
摘要:針對一臺3驅動獨輪車機器人系統,分析了其動力學特性并給出了一種可以實現其前后俯仰平衡運動的控制方法。根據行走輪與地面接觸的非完整約束特性,引入Chaplygin方程建立系統的動力學模型,結果發現獨輪車機器人是一個具有6個獨立廣義速度、3個欠驅動自由度的欠驅動系統。考慮車體俯仰平衡運動的力學子系統,采用部分反饋線性化方法,將其中的欠驅動車體俯仰角線性化,并選擇車體俯仰角和行走輪轉動角為輸出,設計了系統俯仰平衡運動的非線性控制器。最后通過數值仿真控制與物理樣機實驗驗證了所設計控制器的有效性。
關鍵詞:獨輪車機器人;動力學模型;俯仰平衡運動;部分反饋線性化
0引言
獨輪車機器人是一種依靠“獨輪”接地、靜態不穩定但動態可穩定的道路行走機構,因其輕便靈活、節能環保而受到人們的廣泛關注。
目前,人們對獨輪車機器人的研究主要集中在機構設計、動力學建模、平衡控制策略制訂三個方面。文獻[1]設計了一種用輪子、支架和轉盤構成的獨輪車機器人機構。該機構采用線性LQR(linearquadraticregulator)方法實現機器人前后方向的平衡,但由于研究中忽略了系統的狀態耦合,其控制器的魯棒性尚待提高。文獻[2]對文獻[1]的控制方法進行了改進,提出了LQG(linearquadraticGaussian)的控制思路,實現了獨輪車機器人全方位的穩定控制。然而,文獻[2]的工作是在小偏航角的前提下進行的,此時車體側向和前向的耦合很小,動態模型可以簡單地線性化,這與機器人的實際工況尚有差距。文獻[3]設計了一款在車架上安裝兩個閉環機構的獨輪車機器人系統。這種機器人具有很強的平衡能力,但結構復雜且兩個閉環機構需要同時驅動,因此控制難度較高。文獻[4]提出了一種橄欖球輪形的獨輪車機器人。該機器人的驅動輪設計成橄欖球形狀,增大了橫滾調節范圍,降低了側向平衡控制難度。另外,該機器人可左右擺動車身上體部分來調整機器人重心偏移,以此對機器人進行航向控制。文獻[5]利用陀螺原理設計了一種單輪式機器人系統——Gyrover,引起了大量學者的興趣[6-11]。類似地,文獻[12]也提出了一種用雙陀螺調節側向平衡的獨輪車機器人機構,并研究了魯棒增益等控制策略,很好地解決了傾角過大時機器人不可控的問題。利用旋轉陀螺產生的進動力可以使機器人達到較好的平衡效果,但這類機器人高速旋轉陀螺會消耗大量額外的能量,這是機器人節能設計所不希望的。文獻[13]設計了一種行走機構為萬向滾動球的獨輪機構。該機構的側向平衡、俯仰平衡與航向控制均可通過控制“球輪”實現。文獻[14]基于倒立擺原理設計了一款名為Unibot的獨輪車機器人。Unibot車身上部的慣性輪可以為機器人提供側向調整激勵,其車身下部的獨輪則可以為機器人俯仰平衡提供驅動,遺憾的是該機器人沒有設計航向控制機構。文獻[15]報道了一款能夠騎獨輪車的機器人“村田婉童”,“村田婉童”的結構原理與Unibot類似,其設計者在控制上忽略前后與側向動力學耦合影響,因此其平衡能力有待進一步提高。文獻[16]提出一種可調質量塊的獨輪車機器人系統。其研究者認為,左右移動質量塊來改變機器人質心的位置,由此可以產生足夠的重力矩抵消傾倒力矩對機器人的影響。對于實際效果,該文獻僅給出了數值仿真控制驗證,缺乏物理樣機實驗的支撐。文獻[17]設計了一種通過向兩側噴氣實現側向平衡的獨輪車機器人系統。顯然,這種機器人首先需要解決氣源、噪聲等問題,另外,這種設計還需要對噴氣這一復雜的動態過程進行建模,這也會增大控制的難度。文獻[18-21]研究一種慣性擺輪獨輪車機器人系統,該系統采用雙閉環PID控制、線性二次型最優控制、迭代學習控制和滑模控制等控制方法對獨輪車機器人進行平衡控制研究。文獻[22]提出了一種轉動慣量可調的擺輪式獨輪車機器人系統,其特點是機器人垂直轉子和水平轉子上均有三個位置可調的質量塊,可以改變轉子的轉動慣量。文獻[18-21]和文獻[22]設計的獨輪車機器人均達到了一定的平衡效果。
綜上所述,目前獨輪車機器人的機構設計形式較為多樣,先后出現了單輪式Gyrover機器人、橄欖球輪式機器人、球輪式機器人和垂直擺輪式機器人等。其中,垂直擺輪式獨輪車機器人的兩個轉動輪轉軸相互正交,弱化了側向傾角與俯仰角的力學耦合,在一定程度上降低了控制難度。另外,建立準確簡潔的力學模型和設計高效可靠的運動控制器是眾多獨輪車機器人研究人員共同關注的焦點。
本文以一臺具有行走輪、腰輪和擺輪3個驅動輸入的垂直擺輪式獨輪車機器人為研究對象,利用Chaplygin方程建立了機器人在水平地面上行走的數學模型,從而揭示了行走輪、腰輪和擺輪調整平衡和控制航向的力學機理,然后采用部分反饋線性化技術設計了俯仰平衡控制器,最后在數值仿真和樣機實驗兩個方面實現了機器人的俯仰平衡運動控制。
1動力學建模
1.1運動學分析
如圖1所示,本文研究的垂直擺輪式獨輪車機器人系統由車架1、行走獨輪2、腰輪3和擺輪4構成。
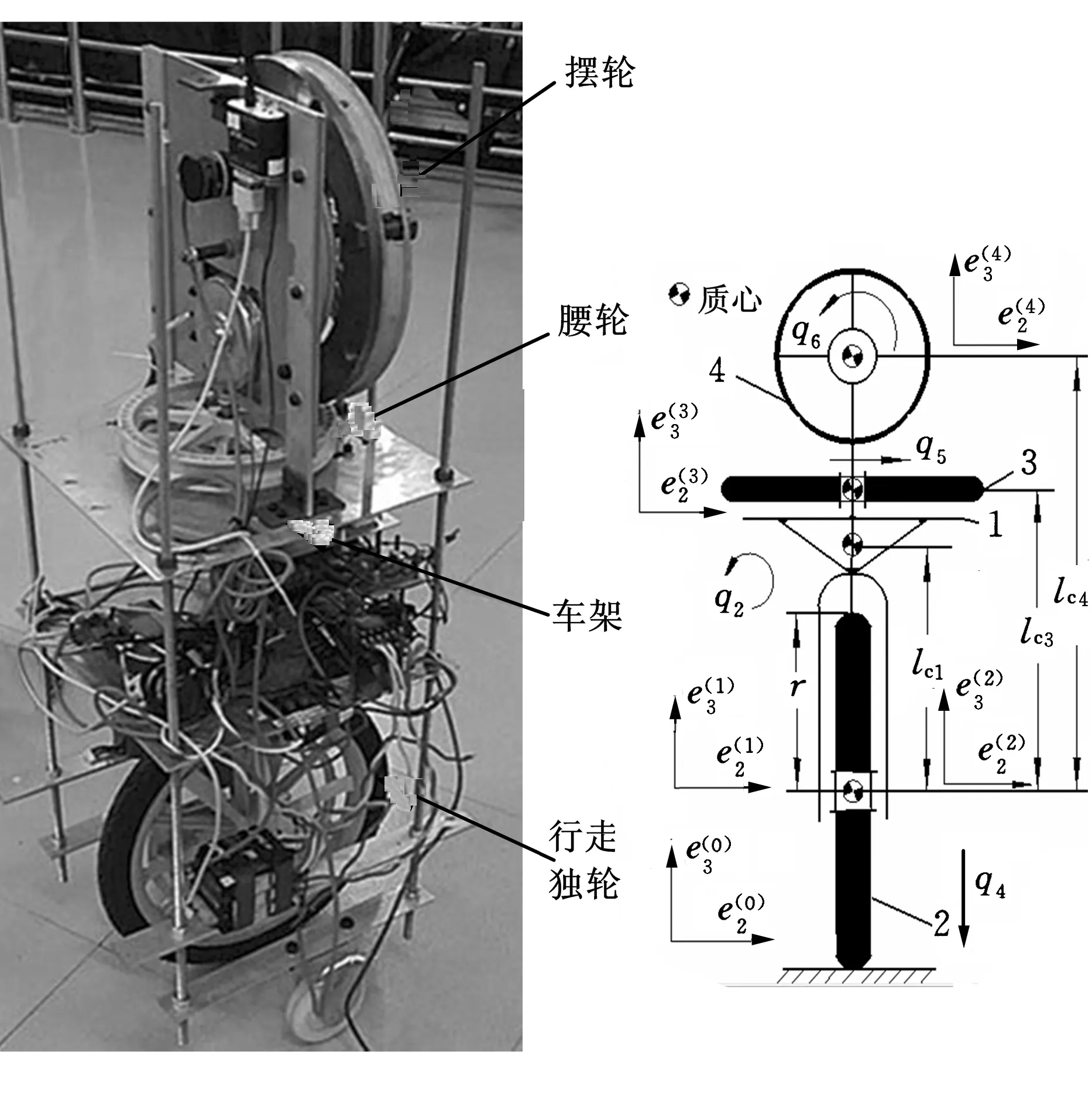
(a)物理樣機(b)結構簡圖圖1 驅動獨輪車機器人系統

獨輪車機器人力學系統的位形需要用9個廣義坐標來確定,分別為車架的3個歐拉角ψ、θ、φ(轉動序列為e3-e1-e2,定義為q1、q2、q3),行走輪相對車架的轉角q4,腰盤相對車架的轉角q5,擺盤相對車架的轉角q6,坐標系{1}原點在坐標系{0}中的位置x、y、z(定義為q7、q8、q9)。
根據歐拉角旋轉序列(e3-e1-e2)的定義,車架的角速度矢量為
(1)

根據相對運動原理行走輪角速度矢量為
(2)

在純滾動的條件下,行走輪與地面的接觸為非完整約束。設車輪接地點的矢徑rA為
(3)
式中,r為行走輪的半徑。
則接地點的速度vA滿足關系式:
(4)
式中,vB2C為行走輪幾何中心的線速度。
根據式(4)可以得到:
(5)
另一方面,行走輪幾何中心的線速度又可以表示為
(6)
綜合式(5)和式(6),得到系統的非完整約束方程:
(7)
(8)
以及系統的完整約束方程:
q9=rc2q2
(9)
由式(7)和式(8)可知,約束是一階線性齊次穩定的,且約束系數不含q7和q8。
綜上可知,系統具有2個非完整約束方程和1個完整約束方程,因此其自由度數是6。
從車架的角速度出發,腰輪、擺輪的角速度矢量可以由以下式子計算:
(10)
(11)
式中,ωB3和ωB4分別為腰輪和擺輪的角速度矢量。
(12)
(13)
(14)
式中,vB3C和vB4C分別為腰輪和擺輪的線速度矢量。
1.2動力學模型
設剛體Bi(i=1,2,3,4)的質量慣性矩陣為
(15)
其中,mi為剛體Bi的質量,I為3×3的單位陣,Ji為剛體Bi的慣性張量矩陣,且
(16)
式中,Jcixx、Jciyy、Jcizz分別為剛體Bi繞其質心坐標系x、y、z軸的轉動慣量。
則系統的總動能
(17)

(18)
式中,g為重力加速度。
由式(17)和式(18)可知,動能T和力函數U也均不包含q7和q8,因此q7和q8為循環坐標。

(19)
σ=1,2,…,6

最終可以得到系統的動力學模型:

(20)
G(q)=(0,G2,G3,0,0,0)T
τ=(0,0,0,τ4,τ5,τ6)T
q=(q1,q2,q3,q4,q5,q6)T

由式(20)知,獨輪車機器人為一個6自由度的欠驅動系統,其中車架的3個歐拉角沒有直接驅動。
2控制方案
2.1控制器設計
本文探討的是獨輪車機器人的俯仰平衡運動控制問題,即如何在鎖定車體的航向角和側向傾角的情況下控制系統的前后俯仰平衡。
分析式(20)給出的系統動力學模型,假設:
(21)
則通過控制行走輪可以實現機器人的前后俯仰平衡。具體做法如下:
(22)
其中,Di j和Ci j分別為矩陣D和C的元素,且
(23)
(24)
利用部分反饋線性化方法設計控制器。因為D34≠0,因此由式(22)第一個方程可以解出
(25)
將式(25)代入式(22)中第二個方程,得到
(26)
引入虛擬控制量υ,取控制力矩
(27)
則式(22)可以改寫為
(28)
若選取虛擬控制量
(29)



(30)
y=Ce
(31)
e=[e1e2e3e4]T
2.2穩定性證明
式(30)在平衡點(e=0)的Jacobin矩陣為
(32)
此時式(32)的特征方程為
s4+(kd-k2w2)s3+(kp-k1w2)s2+
k2w1s+k1w1=0
(33)
根據Routh判據,式(30)穩定的條件是
(34)
由以上分析可知,選擇適當的參數k*可以使式(34)成立,從而使系統(式(28)~式(31))狀態及輸出能夠穩定。
類似地,在獨輪車機器人的側向平衡控制中(鎖定車體的航向角和俯仰角),分析式(20)給出的系統動力學模型,假設:
i=1,3,4,5
(35)
3數值仿真控制實驗
設初始時刻,車架俯仰角為5°,系統的質量、轉動慣量、長度等參數設置如表1所示。
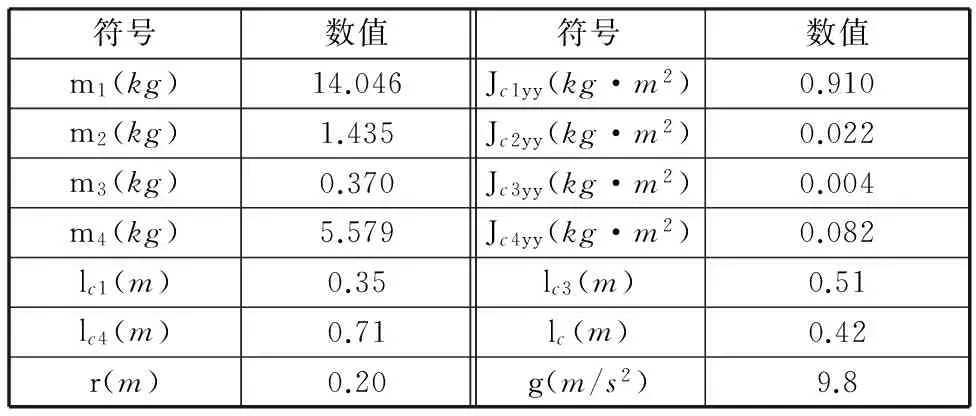
表1 獨輪車機器人系統仿真參數
根據控制器穩定的條件(式(34)),選取控制器參數:kp=550,kd=10,k1=6,k2=2。將有關的參數代入式(33),求解得到復根:
顯然,這些復根全部具有負實部,因此系統穩定。
對式(30)、式(31)進行數值仿真,時間步長設為0.01s,仿真時間為10s。結果如圖2~圖4所示。
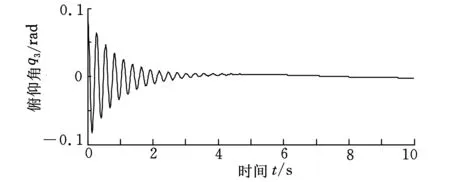
圖2 車架俯仰角(仿真結果)
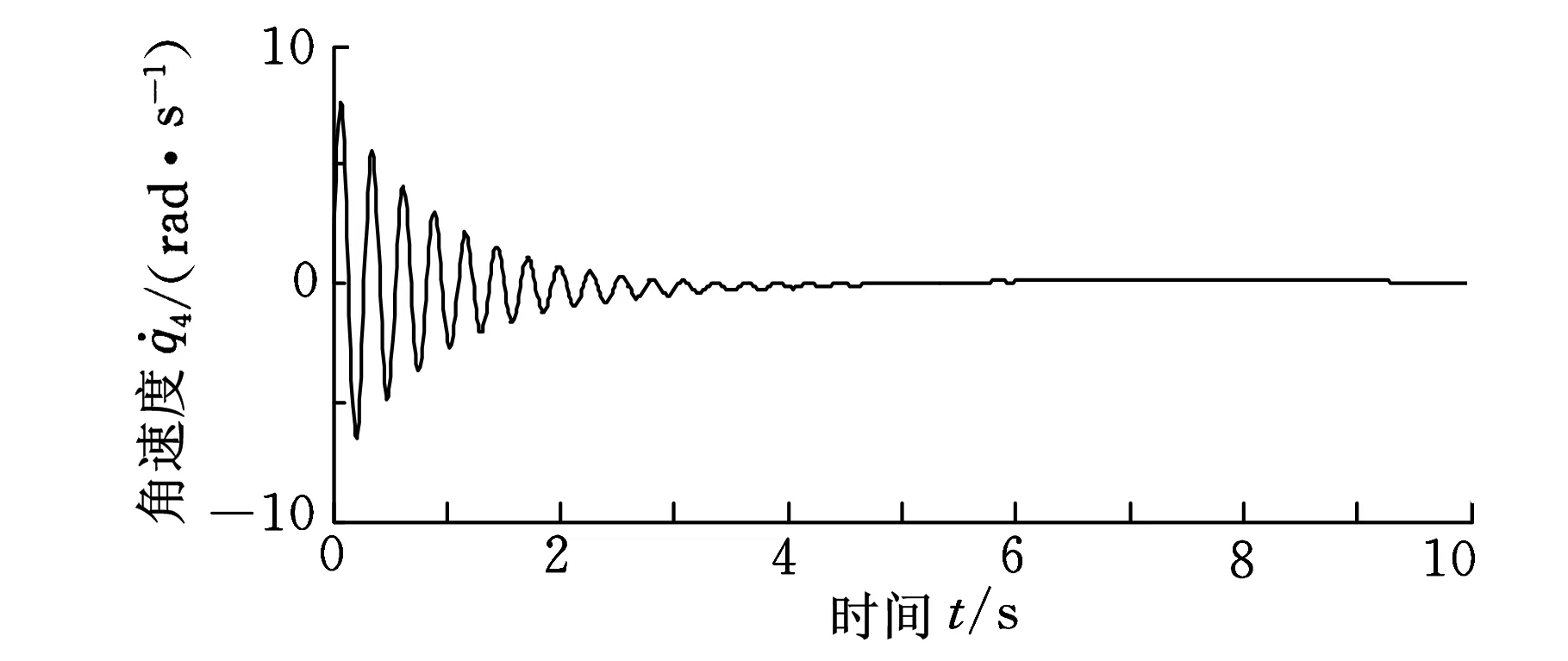
圖3 行走輪角速度(仿真結果)

圖4 行走輪電機的驅動力矩(仿真結果)
從圖2可以看出,車架俯仰角由初始值快速地振蕩衰減,大約經過5s收斂到零位置附近。從圖3可以看出,行走輪的速度也緩慢減小,同樣在5s后也能基本收斂為0。從圖4可以看出,電機的調整力矩最大值達到28N·m,但隨時間變化呈指數衰減,大約在5s也收斂為0。由此不難得出結論,控制方案((式(27)和(式(29))實現了獨輪車機器人的俯仰平衡運動。
4物理樣機實驗
4.1實驗樣機系統簡介
獨輪車機器人樣機如圖1a所示。樣機控制硬件平臺以數字信號處理器(DSP)為核心,包括慣性測量單元、光電編碼器、電流傳感器以及ZigBee通信模塊。圖5為樣機控制系統硬件結構框圖。
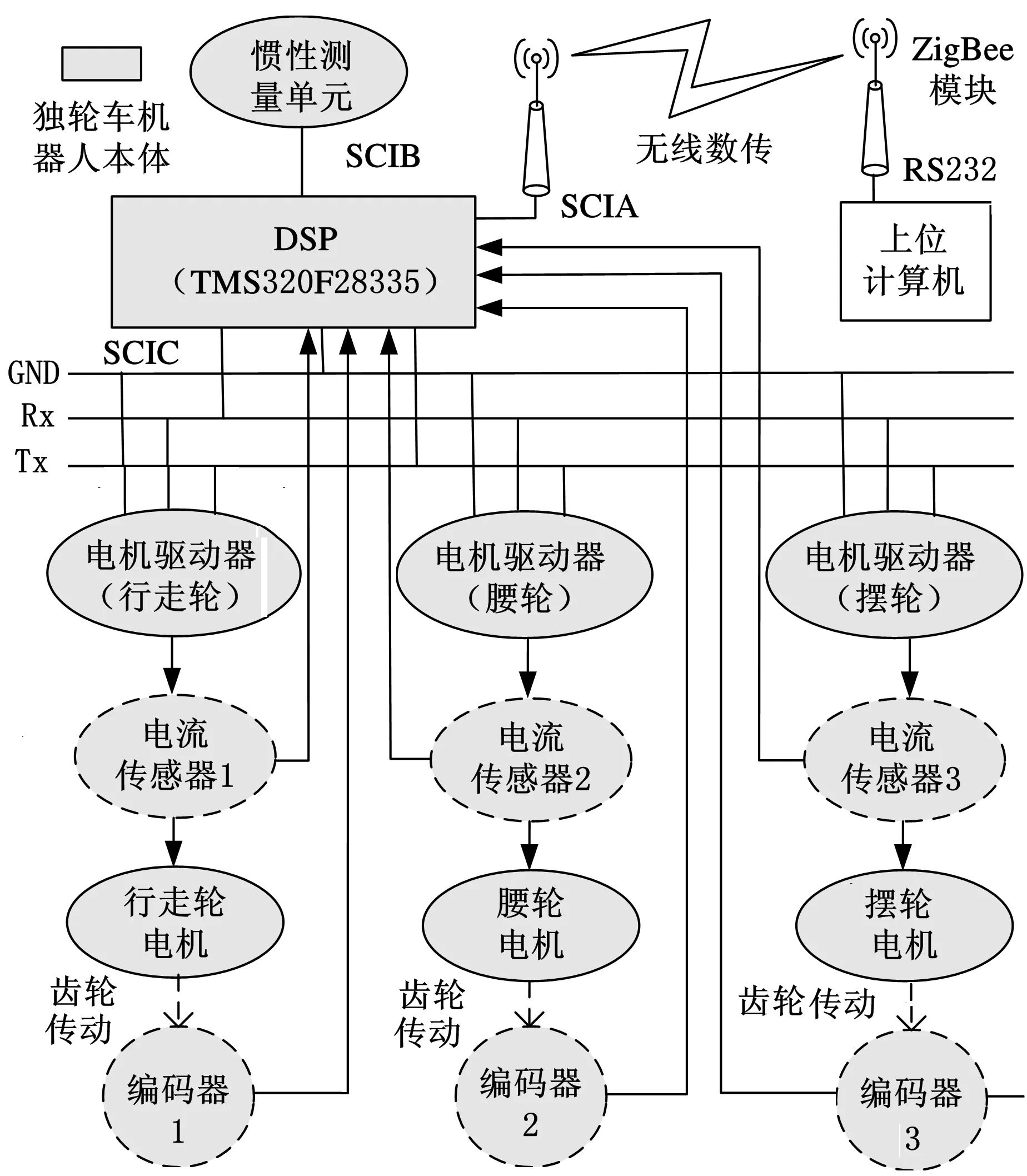
圖5 獨輪車機器人控制系統硬件結構框圖
4.2實驗與結果分析
實驗前,在樣機兩側安裝輔助輪以確保機器人俯仰運動自由但又不會側向傾倒。選取控制器參數kp=450,kd=15,k1=4,k2=1.5,實驗結果如圖6~圖9所示。
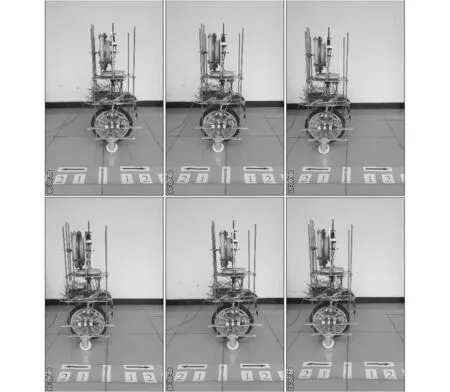
圖6 俯仰平衡行走運動實驗視頻連拍
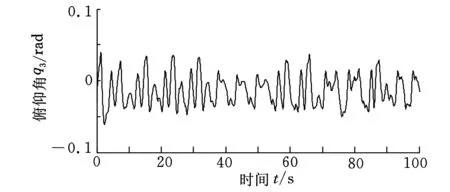
圖7 車架俯仰角(實驗結果)
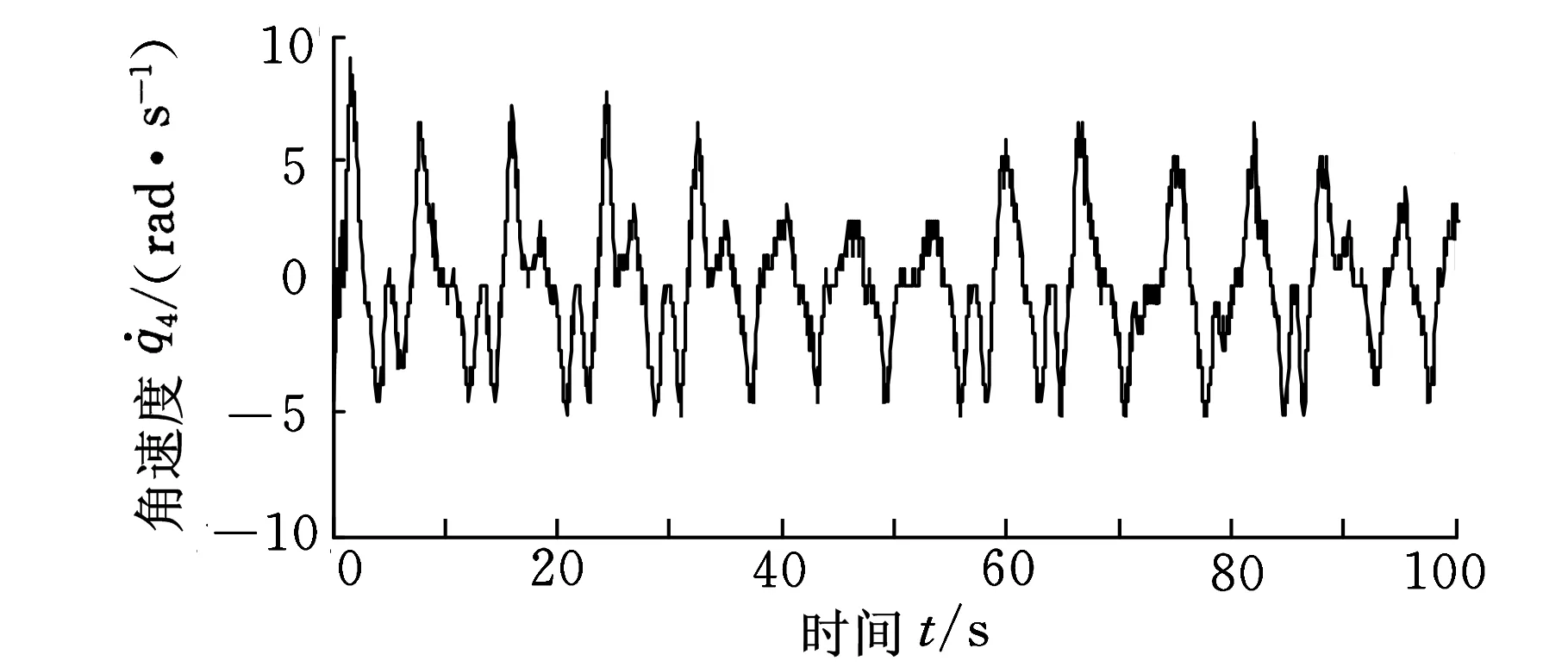
圖8 行走輪角速度(實驗結果)
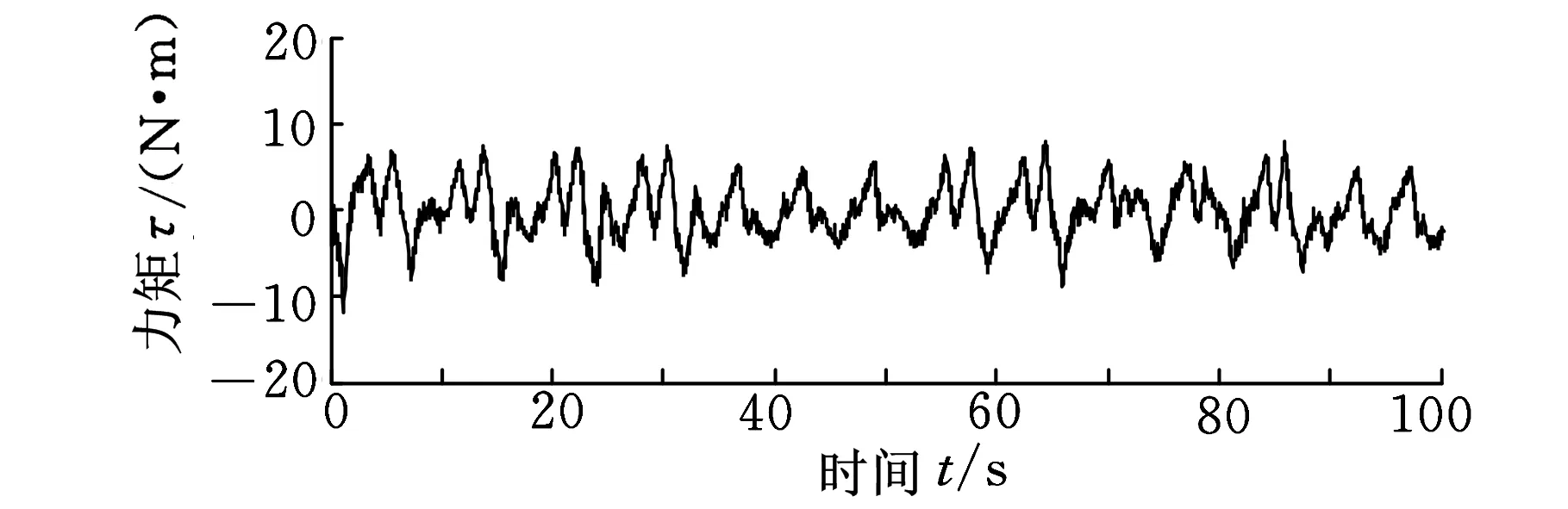
圖9 行走輪電機的驅動力矩(實驗結果)
綜上所述,獨輪車機器人樣機在控制器的作用下實現了在水平地面上的俯仰平衡行走,并且電機的調整能力(速度、力矩)均有一定的閾度,因此可以進一步優化控制器參數,提高系統的響應性能。
5結語
獨輪車機器人的“行走獨輪”與地面在理想情況下為純滾動接觸,這種接觸形式具有明顯的非完整約束特性。本文根據這一特征建立了系統在水平地面上運動的力學模型,有效地揭示了獨輪車機器人行走輪、腰輪和擺輪的運動激勵與車體俯仰角、航向角和橫滾角的動力學耦合關系。研究了單獨考慮車體的前后俯仰運動,通過對力學模型進行降維處理成功地提取出了一個能夠描述俯仰平衡運動力學行為的子系統。采用部分反饋線性化方法,將子系統中的欠驅動車體俯仰角線性化,并選擇車體的俯仰角和行走輪的轉動角為輸出設計了俯仰運動的平衡控制器。數值仿真控制以及物理樣機實驗均證明了本文動力學分析和平衡控制器設計的有效性。
參考文獻:
[1]SchoonwinkelA.DesignandTestofaComputerStabilizedUnicycle[D].Standford:StanfordUniversity,1987.
[2]VosDW.NonlinearControlofanAutonomousUnicycleRobot:PracticalIssues[D].Cambridge:MIT,1992.
[3]ShengZaiquan,YamafujiK.PosturalStabilityofaHumanRidingaUnicycleandItsEmulationbyaRobot[J].IEEETransactionsonRoboticsandAutomation,1997,13:709-720.
[4]HaY,YutaS.TrajectoryTrackingControlforNavigationofSelf-containedMobileInversePendulum[C]//Proc.ofthe1994IEEE/RSJInt.Conf.onIntelligentRobotsandSystems.Munich,1994:1875-1882.
[5]BrownHB,XuY.ASingle-wheelGyroscopicallyStabilizedRobot[C]//Proceedingsofthe1996IEEEInternationalConferenceonRoboticsandAutomation.Minncapolis,Minnesota,1996:3658-3663.
[6]XuY,AuKW,NandyGC,etal.AnalysisofActuationandDynamicBalancingforaSingleWheelRobot[C]//Proceedingsofthe1998IEEE/RSJInt.Conf.onIntelligentRobotsandSystems.Victoria,1789-1794.
[7]GoraC.NandyIT,XuY.DynamicModelofaGroscopicWheel[C]//Proceedingsofthe1998IEEEInternationalConferenceonRobotics&Automation.Leuven,Belgium,1998:1683-2688.
[8]OuYongsheng,XuYangsheng.BalanceControlofaSingleWheelRobot[C]//Proceedingsofthe2002IEEE/RSJInt.ConferenceonIntelligentRobotsandSystem.Lausane,Switzerland,2002:2043-2048.
[9]SalehT,HannYH,ZhuZ,etal.DesignofaGyroscopicallyStabilizedSingle-wheelRobot[C]//IEEEInternationalConferenceonRobotics,AutomationanMechatronics,RAM2004.Singapore,2004:904-908.
[10]MamunA,ZhuZ,VadakkepatP,etal.TrackingControloftheGyrobots:aGyroscopically-stabilizedSingle-wheeledRobot[C]//The31stAnnualConferenceoftheIEEEIndustrialElectronicsSociety,IECON05.Raleigh,NorthCarolina,USA,2005:1839-1844.
[11]ZhenZ,AbdullahAM,PrahladV,etal.LineTrackingoftheGyrobot—AGyroscopicallyStabilizedSingle-wheeledRobot[C]//Proceedingsofthe2006IEEEInternationalConferenceonRoboticsandBiomimetics.Kunming,2006:293-298.
[12]DaoMQ,LiuKZ.Gain-scheduledStabilizationControlofaUnicycleRobot[J].JSMEInternationalJournal,2005, 48(4):649-656.
[13]LauwersTB,KantorGA,HollisRL.ADynamicallyStableSingleWheeledMobileRobotwithInverseMouse-ballDrive[C]//Proceedingofthe2006IEEEInternationalConferenceonRoboticsandAutomation,Orlando,Florida,2006:2884-2889.
[14]deCallafonRA.UCSDJacobs.SchoolofEngineering[EB/OL]. [2015-03-03].http://maeresearch.ucsd.edu/callafon/research/index.html#PROJECTS.
[15]叢秋波. 村田制造所:“村田頑童”攜手“村田婉童”展示高新技術[J]. 電子設計技術,2008(12):124-125.
CongQiubo.MurataManufacture:“MurataBoy”HandinHand“MurataTong”ExhibitionofHigh-tech[J].ElectronicDesignTechnology,2008(12):124-125.
[16]郭磊,廖啟征,魏世明,等.獨輪車機器人的動力學建模與非線性控制[J].系統仿真學報,2009,21(9):2730-2733.
GuoLei,LiaoQizheng,WeiShiming,etal.DynamicalModelingandNonlinearControlofUnicycleRobot[J].JournalofSystemSimulation,2009,21(9):2730-2733.
[17]LeeJH,ShinHJ,LeeSJ,etal.NovelAirBlowingControlforBalancingaUnicycleRobot[J].IntelligentRobotsandSystems,2010,2529-2530.
[18]朱曉慶,阮曉鋼,魏若巖.基于慣性飛輪的獨輪自平衡機器人側向動力學分析[J].應用力學學報,2013,30(3):395-400.
ZhuXiaoqing,RuanXiaogang,WeiRuoyan.LateralDynamicAnalysisofSelf-balanceSingleWheelRobotBasedonFlywheel[J].JournalofAppliedMechanics,2013,30(3):395-400.
[19]阮曉鋼,胡敬敏, 王啟源,等.一種獨輪車機器人的滑模控制[J]. 控制工程, 2011,18(1):128-132.
RuanXiaogang,HuJingmin,WangQiyuan,etal.Sliding-modeControlofaUnicycleRobot[J].ControlEngineering,2011,18(1):128-132.
[20]朱曉慶, 阮曉鋼,魏若巖, 等. 獨輪機器人側向通道建模與控制[J].北京工業大學學報,2013,39(10):1474-1480.
ZhuXiaoqing,RuanXiaogang,WeiRuoyan,etal.LateralDynamicModelingandControlofaSingleWheelRobot[J].JournalofBeijingUniversityofTechnology,2013,39(10): 1474-1480.
[21]王啟源,阮曉鋼.獨輪自平衡機器人雙閉環非線性PID控制[J].控制與決策,2013,27(4):593-597.
WangQiyuan,RuanXiaogang.DualLoopNonlinearPIDControlofSingle-wheeledRobot[J].ControlandDecisionMaking,2013,27(4):593-597.
[22]白占欣.六自由度獨輪機器人本體研制及動力學控制方法研究[D].哈爾濱:哈爾濱工業大學,2011.
(編輯王艷麗)
DynamicsModelandBalancedPitchingControlofaUnicycleRobot
ZhuangWeiLiuChengjuJiangHanHeShutongGuilinUniversityofElectronicTechnology,Guilin,Guangxi,541004
Abstract:Dynamics of a three driven joints’ unicycle robot and controller to achieve the robot’s balanced pitching motion were disscused herein.Firstly,considering the coholonomic constrain between the running wheel and the ground,a dynamics model for the unicycle robot was established by using Chaplygin equation.The model reveals there are 6 generalized velocities and 3 underactuated freedoms in the robot system. Secondly,focusing on the dynamics subsystem of the robot's balanced pitching motion, and a controller for this kind of motion was developed. The controller was based on the partial feedback linearization method, which linearized the underactuated pitching angle,and took the pitching angle and the rotating angle of the running wheel as outputs.The numerical simulation and prototype experiments were performed to testify the validilities of the proposed controller.
Key words:unicycle robot;dynamics model;balanced pitching motion;partial feedback linearization
收稿日期:2015-03-03
基金項目:國家自然科學基金資助項目(51305087);國家級大學生創新創業訓練計劃資助項目(201510595034);桂林電子科技大學研究生教育創新計劃資助項目(YJCXS201511,YJCXS201512)
中圖分類號:TP24
DOI:10.3969/j.issn.1004-132X.2016.04.008
作者簡介:莊未,女,1977年生。桂林電子科技大學機電工程學院副教授。主要研究方向為機器人動力學及控制技術。劉成舉,男,1991年生。桂林電子科技大學機電工程學院碩士研究生。江漢,男,1990年生。桂林電子科技大學機電工程學院碩士研究生。何淑通,男,1990年生。桂林電子科技大學機電工程學院碩士研究生。
