基于PTP協議的分布式數據采集系統可行性分析*
2016-06-30 07:06:48顧小萍譚躍剛吳浩然
艦船電子工程 2016年6期
顧小萍 譚躍剛 吳浩然
(1.湖北輕工職業技術學院機電工程系 武漢 430070)(2.武漢理工大學 武漢 430070)(3.海軍工程大學 武漢 430033)
基于PTP協議的分布式數據采集系統可行性分析*
顧小萍1譚躍剛2吳浩然3
(1.湖北輕工職業技術學院機電工程系武漢430070)(2.武漢理工大學武漢430070)(3.海軍工程大學武漢430033)
摘要論文首先介紹了PTP協議的開發背景,接著對協議中涉及的時間同步原理、同步時鐘和最佳主時鐘算法進行了詳述。然后就其它傳統同步技術,分析了PTP協議的優勢,指出PTP協議綜合了軟硬件同步方法的優點,可以在不需要太多資源的前提下,就能夠獲得量級在亞微秒級的時鐘同步精度。最后,得出研究基于PTP協議的分布式數據采集系統是可行的結論。
關鍵詞PTP協議; 分布式數據采集; 時鐘同步
Class NumberTP274
1引言
時鐘同步是分布式數據采集系統正常工作的核心技術之一目前,針對分布式系統的實現以及所要求的時鐘精度,存在著不同的協議標準如:NTP、SNTP、IEEE1588 標準的 PTP 協議[1~3](除特別說明外,本文中IEEE1588 協議等價于PTP 協議)。傳統的時間同步協議(這里特指軟件同步方法NTP、SNTP)由于受其實現機理的限制,同步精度一般較低(NTP在廣域網中的精度一般為幾十毫秒,局域網中一般為亞毫秒,而SNTP為NTP的簡化版本,只能達到毫秒級的同步精度)。另一方面,利用硬件時鐘同步的方法,雖然可以獲得很高的精確度(一般為 10-9s~10-6s),但需引入專用的硬件時鐘同步設備,這使得時鐘同步的代價較高,應用范圍小且操作不便。IEEE 1588協議綜合了軟硬件同步方法的優點,在不需要太多的資源的前提下,就可以獲得適用于高端設備以及低端廉價設備都能夠訪問的,量級在亞微秒的時鐘同步精度。
2IEEE1588協議概述
IEEE1588定義了一個能夠在測量和控制系統中實現高精度時鐘同步的協議[4~6]——精確時間協議(Precision Time Protocol,PTP)。PTP集成了網絡通訊、局部計算和分布式對象等多項技術,適用于所有通過支持多播的局域網進行通訊的分布式系統,特別適合于以太網,但不局限于以太網。PTP協議能夠使異質系統中各類不同精確度、分辨率和穩定性的時鐘同步起來,占用最少的網絡和局部計算資源,在最好情況下能達到系統級的亞微秒級的同步精度。
2.1同步原理
在通訊過程中,PTP通過主從設備間傳遞消息,計算時間偏差來達到主從同步。主時鐘周期性地組播包含時間戳的消息,需要同步的從時鐘向主時鐘發送消息,從時鐘根據收到的時間信息和自身發送消息的時間,計算出與主時鐘的偏差和線路延遲。這種同步消息傳遞的機制被稱為延時請求響應機制。
2.2PTP時鐘狀態機
PTP時鐘狀態轉換如圖1所示。

圖1 狀態機
當一個時鐘上線,它在系統指定的時間內監聽來自主時鐘的Sync消息;
1)如果收到Sync消息,則根據最佳主時鐘算法,確定狀態;
2)如果這段時間內沒有收到Sync消息,該時鐘則假定自己為主時鐘,此時的狀態為Pre_ Master,時鐘的端口表現為主時鐘的狀態,但是不發送Sync消息;(1)這個Pre_ Master狀態會保持一定的時間;(2)如果在指定的時間內仍沒有收到其它時鐘的Sync消息,則該時鐘狀態為主狀態Master,并且發送Sync消息。
2.3PTP時鐘類型
PTP時鐘[7~8]主要包括:普通時鐘、邊界時鐘、透傳時鐘和混合類型時鐘。
2.4最佳主時鐘算法
在IEEEl588協議中,最佳主時鐘算法[9]BMC(Best Master Clock algorithm)是最核心也是最關鍵的技術之一,它直接關系到系統時鐘源的選擇。BMC由數據集比較算法和狀態決策算法兩個部分組成。其中,數據集比較算法比較兩組數據的優劣,可能一組是代表本地時鐘的缺省特性的數據,一組代表從某端口接收的同步報文所包含的信息。這個比較算法一方面要對各種數據組進行比較,另一方面還要根據數據組比較結果計算每個端口的推薦狀態(主站、從站、待機、未校正、只聽、禁止、初始化、故障狀態)。
狀態決策算法是在數據集比較算法的基礎上來決定本地時鐘端口的狀態.因此狀態決策算法實際上是通過多次運行數據集比較算法,算法的流程如圖2所示。
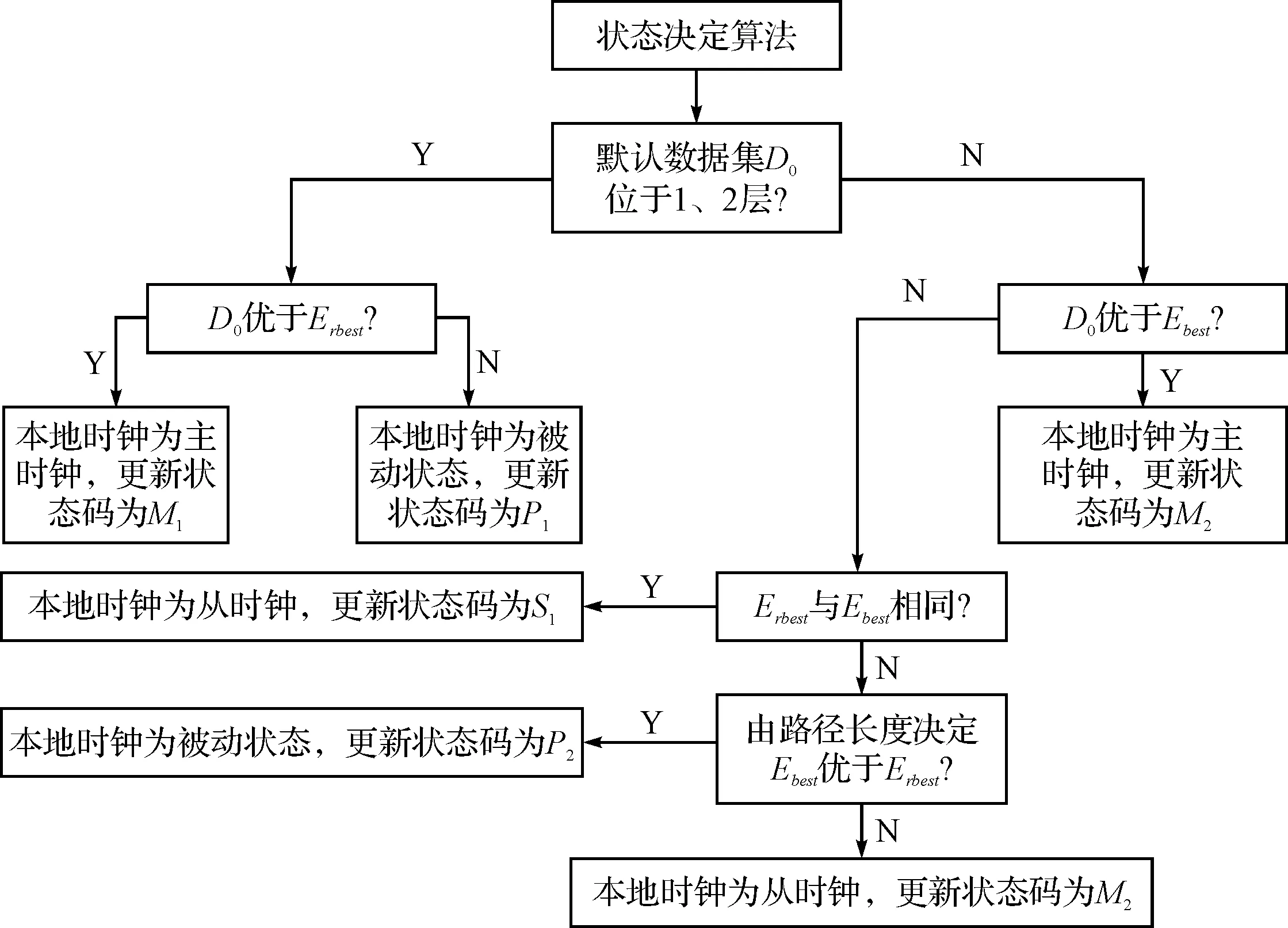
圖2 狀態決策算法流程
在算法的開始。首先判斷本地時鐘的默認數據集D0的超主時鐘級別,如果D0的超主時鐘是1級或2級時鐘。則用數據集比較算法比較D0和時鐘端口接收到的同步報文中的最好值Erbest,如果Erbest性能優于D0,則本地時鐘為被動狀態,并將更新狀態碼設為P1,若D0優于Erbest,則本地時鐘為主時鐘。同時將更新狀態碼設為M1。如果D0的超主時鐘不是1級、2級時鐘,則用數據集比較算法比較數據集D0和時鐘的所有端口收到的同步報文中的最佳者Ebest,若D0優于Ebest,則設本地時鐘為主時鐘,同時將更新狀態碼設為M2。若同步報文Ebest性能優于D0,則再用數據集比較算法比較Erbest與Ebest,若兩者相同,則設本地時鐘為從時鐘。并將更新狀態碼設為S1。
時鐘端口在通過運行狀態決策算法后,會得出本地時鐘端口的狀態,同時也會得到一個更新狀態碼。根據更新狀態碼,時鐘的數據集管理系統會對時鐘的當前數據集、父數據集和全球時間數據集進行修正。修正的信息來源會根據不同的更新狀態碼而有所不同。更新狀態碼為M1、M2,系統將根據本地時鐘默認數據集的相關參數對當前數據集、父數據集和端口數據集進行更新,如果更新狀態碼是P1、P2,則更新數據源是時鐘端口接收到的同步報文中的最好值Erbest,若更新狀態碼是M3,則更新數據源是時鐘的所有端口收到的同步報文中的最佳者Ebest。
3相對于傳統時間同步算法的優勢
3.1時間戳獲取位置優勢
在一個完整的信息封裝、發送、接收、解析過程中,報文從發送端協議棧中的發送時間戳[10]獲取點到接收端協議棧中的接收時間戳獲取點所經過的網絡傳輸延遲的不確定性,主要來自于發送端和接收端的本地協議棧以及交換設備中的協議棧。這是由于協議棧的大部分都由軟件實現,這些運算處理的實際過程會受到CPU中斷和操作系統調度的影響,所以這些運算處理從開始到完成所經過時間是不確定的,幾乎每次都不同。
如圖3所示,傳統的時間同步協議如NTP協議的時間戳處理在C點,A-C的不確定性延時會導致NTP的誤差達到幾十毫秒,嚴重影響時間同步的精度;若要降低網絡傳輸延遲的不確定性,需要盡可能地將時間戳獲取點向協議棧的底層移動,時間戳的獲取點越靠近傳輸介質,獲取的發送和接收時間戳的精度越高,而IEEE1588的時間處理在A點,這極大地提高了系統時間同步精度。

圖3 硬件打時間戳
3.2中間網絡設備延時獲取優勢
當系統中存在路由器或交換機這樣的中間轉換設備時,由于需要進行路由選擇,將會帶來時間延遲問題。針對此種情況,傳統時間同步協議基本上是沒有考慮這些設備帶來的時延問題。與傳統時間同步協議不同,IEEE1588V2新增的透傳時鐘模式,可以計算出中間網絡設備引入的駐留時間,從而實現主從時鐘間精確的時鐘同步。
3.3時間同步精度優勢
網絡時間協議(NTP)已是以太網時間同步的傳統方式,它允許時間同步達到100ms。從圖4可以看出,采用PTP可以實現更嚴格的控制。其中單純采用軟件PTP(典型特征為軟件時間戳)精度為微秒級,而采用硬件輔助的PTP 方案(典型特征為硬件時間戳)可以實現納秒級的時間同步性能。采用NTP、軟件IEEE1588以及硬件輔助方式的IEEE1588所能夠獲得的時間同步精度如圖4所示。
3.4其他性能對比情況
表1列出了TOP、以太網物理層同步、NTP以及IEEE1588四種同步技術關于各自技術特點、優勢以及局限性方面的對比情況。
由表1可見,只有IEEE1588協議能夠獲得低于亞微秒級的時間同步精度。
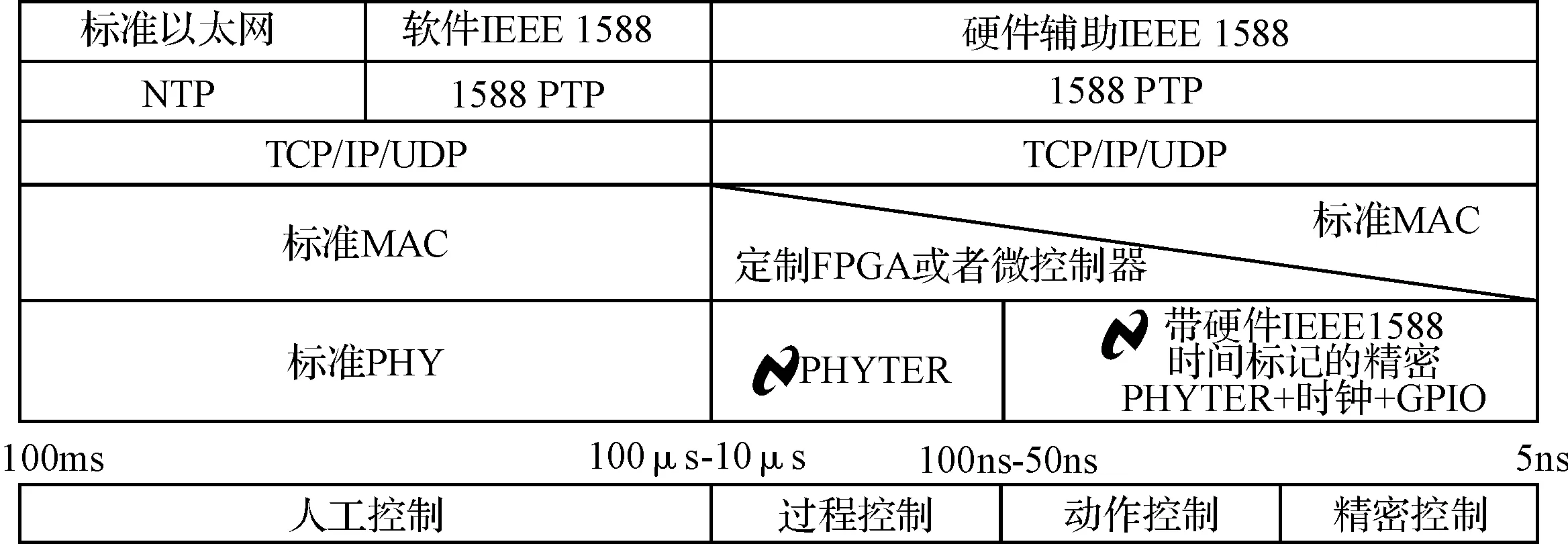
圖4 時鐘同步實現方案的選擇
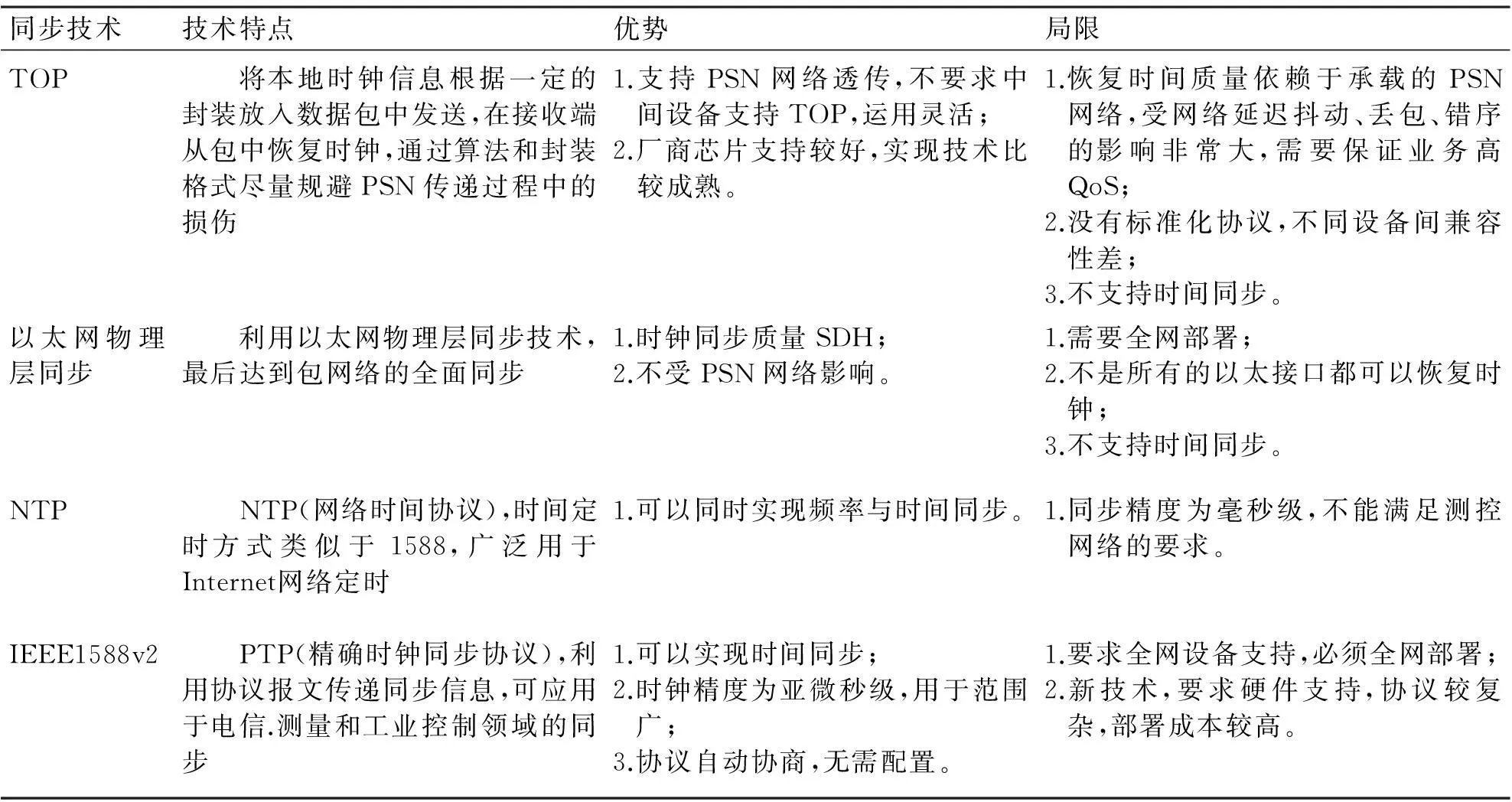
同步技術技術特點優勢局限TOP 將本地時鐘信息根據一定的封裝放入數據包中發送,在接收端從包中恢復時鐘,通過算法和封裝格式盡量規避PSN傳遞過程中的損傷1.支持PSN網絡透傳,不要求中間設備支持TOP,運用靈活;2.廠商芯片支持較好,實現技術比較成熟。1.恢復時間質量依賴于承載的PSN網絡,受網絡延遲抖動、丟包、錯序的影響非常大,需要保證業務高QoS;2.沒有標準化協議,不同設備間兼容性差;3.不支持時間同步。以太網物理層同步 利用以太網物理層同步技術,最后達到包網絡的全面同步1.時鐘同步質量SDH;2.不受PSN網絡影響。1.需要全網部署;2.不是所有的以太接口都可以恢復時鐘;3.不支持時間同步。NTP NTP(網絡時間協議),時間定時方式類似于1588,廣泛用于Internet網絡定時1.可以同時實現頻率與時間同步。1.同步精度為毫秒級,不能滿足測控網絡的要求。IEEE1588v2 PTP(精確時鐘同步協議),利用協議報文傳遞同步信息,可應用于電信.測量和工業控制領域的同步1.可以實現時間同步;2.時鐘精度為亞微秒級,用于范圍廣;3.協議自動協商,無需配置。1.要求全網設備支持,必須全網部署;2.新技術,要求硬件支持,協議較復雜,部署成本較高。
4結論
在當今經濟技術高度發展,系統規模空前巨大,分散控制和網絡化的時代,分散時鐘的同步越加重要。IEEE1588定義了一個在測量和控制網絡中,與網絡交流、本地計算和分配對象有關的精確同步時鐘的協議。1588協議是建立在網絡基礎上的,但它并不需要為時鐘傳遞建立特別的網絡,實現1588協議只需在原有網絡上添加時間同步報文,這些報文只占用少量網絡資源,它們只是和控制數據包或其他信息包共享網絡。從目前的原型實驗和應用來看,IEEE1588精確時間協議可以達到亞微秒級的同步精度,并且有可能達到更高的精度。目前許多芯片制造商已開發出PTP 協議棧軟件開發包,這減少了技術人員在理解PTP 協議深層次內容的投入精力,縮短了開發時間,提高了研發效率。因此,基于PTP協議的分布式數據采集系統是可行的。
參 考 文 獻
[1] ieee1588[EB/OL].http://www.ieee1588.com.
[2] IEEE Std 1588-2002.IEEE Standard for a precision ClockSynchronization Protocol for Networked Measurement andControl Systems[S].
[3] IEEE Std 1588-2008.IEEE Standard for a precision ClockSynchronization Protocol for Networked Measurement andControl Systems[S].
[4] IEEE Instrumentation and Measurement Society.IEEE Standard for a Precison Clock Synchronization Protocol for Networked Measurement and Control Systems.NewYork,USA.IEEE,2002.
[5] 陳姝,胡冰新,劉景夏,等.IEEE 1588精確時間同步協議淺析[J].微計算機信息,2012,28(2):126-128.
[6] 黃云水, 馮玉光.IEEE1588精密時鐘同步分析[J].國外電子測量技術,2005,24(9):9-12.
[7] 舒邦久,姚沛,劉興文.IEEE 1588的時鐘設備模型研究[J].電子技術,2009,12:42-44.
[8] 陳金鳳,華宇,孫中尉.IEEE1588v2透明時鐘研究與實現[J].宇航計測技術,2013,33(3)11-16.
[9] 戴寶峰,崔少輝,常健.IEEE1588最佳主時鐘算法的分析與實現[J].儀表技術,2008(2):29-34.
[10] Hans Weibel.IEEE1588 Implement ation and Performance of Time Stamping Techniques[C]//Gaithersbarg: Procedings of NIST Conference on IEEE 1588,2004.
Feasibility Analysis of Distributed Acquisition System Based on PTP
GU Xiaoping1TAN Yuegang2WU Haoran3
((1.Department of Electro-machinery Engineering, Hubei Light Industry Technology Institute,Wuhan430070)(2.Wuhan University of Technology, Wuhan430070)(3.Naval University of Engineering, Wuhan 430033)
AbstractThe paper firstly introduces the background of the precision time protocol (PTP). Then, it specifies the principles of time synchronization, clock types and best master clock algorithm (BMC) associated with the PTP. Compared with the conventional time synchronization methods based on the software and hardware, this report analyzes the advantages of the PTP. By using the PTP, it can easily obtain the time synchronization accuracy order of sub-microsecond without too much resource.Finally, a conclusion can be drawn that the study on the distributed acquisition system based on the PTP is feasible.
Key Wordsprecision time protocol, distributed acquisition system, time synchronization
*收稿日期:2015年12月13日,修回日期:2016年1月27日
作者簡介:顧小萍,女,碩士研究生,研究方向:傳感器。譚躍剛,男,教授,研究方向:機械自動化。吳浩然,男,博士研究生,研究方向:水聲信號處理。
中圖分類號TP274
DOI:10.3969/j.issn.1672-9730.2016.06.024
