全自動智能垃圾桶設計淺談
2016-07-05 16:59:44羅萱格
科技風 2016年18期
羅萱格
摘 要:提出了一種用于收集可壓縮生活垃圾、完全無人工干預的智能氣動生活垃圾桶,設計了智能化氣壓傳動垃圾桶總體方案,介紹了其機械、氣動、電氣等系統的方案。分析和試驗表明,智能垃圾處理柜噪聲不超過30 dB,表明氣動系統平順性好、無噪聲。滿足了居民區環保、便利的生活需要,具有很好的實際應用價值。
關鍵詞:全自動,垃圾桶,氣壓驅動
中圖分類號:TH122;X70 文獻標志碼:B
傳統的生活垃圾收集方式對環境的污染,困擾著人們的日常生活和健康。
其一,無蓋的垃圾桶雖然方便人們投送垃圾,但是存在衛生問題,垃圾的各種難聞的氣味特別容易通過空氣傳播,而細菌的感染間接地給人們帶來了種種疾病的隱患,影響人們的生活;
其二,有蓋的垃圾桶相對衛生但是很不方便,而且必須通過自己親手開啟垃圾桶的蓋子才能扔垃圾,這樣就容易造成接觸感染,既不衛生又影響心情。
同時,對于傳統的環衛垃圾桶而言,換袋、打包、裝車等動作必須由環衛工人來完成,既增加了工人的勞動強度又不衛生。
為此,不少科技工作者設計了半自動或全自動垃圾收集裝置[ 1-3 ],但均難以實現真正意義上的全自動智能化控制,仍然需要扔垃圾者、收垃圾者,以及垃圾箱管理者進行人工干預,人們難以適應,因此一直難以推廣[ 1 ]。
氣動技術、PLC控制在機器人中得到了廣泛應用[ 4 ],因此,作者提出一種用于收集可壓縮生活垃圾、完全無人工干預的智能氣動生活垃圾桶。
一、總體方案
(一)選用氣動作為驅動
與電動和液動相比,氣動具有如下顯著優勢,因此,這種驅動方式最適合本設備:
1)由于空氣的粘度只有液壓油的萬分之一,流動阻力小,有利于介質的集中供應和遠距離輸送;
2)氣源集中供應的優勢,使得這個系統不需要高壓電,不但安全,而且容易實現集成化、網絡化;
3)由于其壓縮性好,機構運動最柔和,沖擊小;
4)介質為空氣,清潔安全、獲取簡單、運行成本最低廉、尤其無任何環境污染;
5)能量存儲最方便;
6)系統構造最簡單、最可靠、使用維護保養最方便。
(二)實現如下功能:
人接近垃圾柜后,感應開關控制氣缸將垃圾桶蓋2打開→人往垃圾柜內丟可壓縮垃圾后,氣缸壓實垃圾一次并收回到初始位置→人離開后,垃圾桶蓋2在氣缸驅動下自動關閉→如果檢測到垃圾壓實后已經到達設定的高度,則一個氣缸推動加熱器的砧座,從一個方向把垃圾袋推往中心位置;另一個氣缸推動加熱器的熱阻絲座,從另一個方向把垃圾袋推往中心位置,將垃圾袋壓緊在電熱阻絲座與砧座之間→垃圾袋被壓緊后,電熱阻絲自動給電,對袋口加熱一定時間,然后冷卻;然后上述兩個氣缸分別帶著砧座和電阻絲縮回到初始位置→之后,氣缸使垃圾柜的側門打開→之后,氣缸伸出推動裝滿垃圾的垃圾袋,推出使之離開垃圾柜,然后氣缸收回至初始位置→之后,氣動馬達帶動卷紙筒,將新垃圾袋運送到中間位置→最后,氣缸推動垃圾柜的側門關上,同時將新垃圾袋壓緊。
總之,垃圾柜可實現柜體開閉、垃圾壓縮、垃圾袋封口、垃圾推送和換袋步驟的全自動操作,實現了扔垃圾者、收垃圾者永遠不需要接垃圾柜、管理者也常年不需要開箱、而自動包裝后的垃圾自動整齊排放于地面的“超級懶人”效果,設備不帶強電、無污染、可抵抗日曬風吹雨淋。
二、機械結構系統
如圖1~8所示,垃圾桶的總體尺寸為:長450,寬440,高470。
本文設計的全自動智能垃圾桶,包括桶體1、設于桶體1上方的桶蓋2以及設于桶體1內部的內膽3,該桶體1內裝設有桶蓋2開閉裝置、垃圾壓縮機構、垃圾袋25封口裝置、垃圾推送機構、換袋裝置,所有運動都采用氣動驅動和PLC控制。
圖1為本文全自動智能垃圾桶的45°俯視示意圖;
圖2為本文全自動智能垃圾桶的側視結構示意圖;
圖3為本文全自動智能垃圾桶的后視結構示意圖;
圖4為圖3中A-A處的剖視結構示意圖;
圖5為圖4中B處的局部放大圖;
圖6為本文全自動智能垃圾桶的俯視結構示意圖;
圖7為本文全自動智能垃圾桶中垃圾袋卷展開后的結構示意圖;
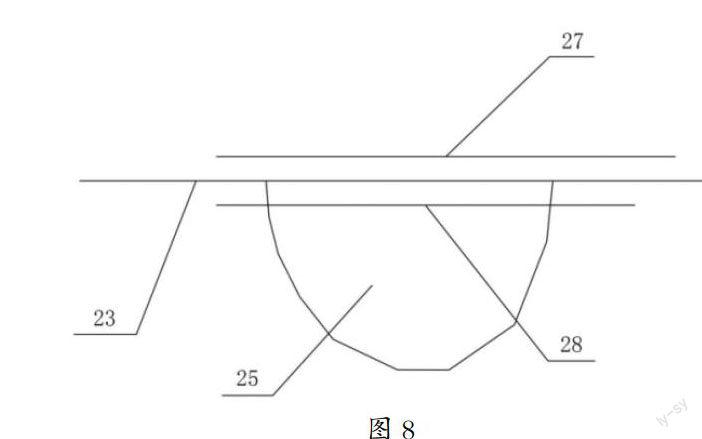
圖8為本文全自動智能垃圾桶中垃圾袋卷換袋時的結構示意圖。
圖1~ 8中:
1、桶體;2、桶蓋2;3、內膽;4、紅外傳感器;5、橡膠坐墊;6、桶蓋氣缸;7、垃圾壓縮氣缸;8、壓縮踏板;9、封口氣缸;10、位置傳感器;11、側板;12、背板;13、底板;14、垂直門;15、垂直門驅動氣缸;16、推送氣缸;17、垃圾推送架;18、氣動馬達;19、驅動轉軸;20、顏色傳感器;21、從動轉軸;22、垃圾袋25卷;23、背景布;24、垃圾袋25放置孔;25、垃圾袋;26、顏色識別帶;27、上夾板;28、下夾板。
桶蓋2開閉裝置包括:設于所述桶蓋2上方的紅外傳感器4,用于檢測垃圾桶周圍是否有垃圾投放者;安裝于桶體1內壁的橡膠座墊和橡膠,用于桶蓋2關閉時緩沖;裝設于橡膠座墊上的桶蓋2氣缸,用于驅動桶蓋2啟閉,該桶蓋2氣缸的一端與橡膠座墊連接,另一端與桶蓋2的內壁相連。
垃圾壓縮機構包括安裝于桶蓋2上的垃圾壓縮氣缸7,該垃圾壓縮氣缸7的活塞桿伸入桶體1內,活塞桿伸入桶體1內的一端連接一壓縮踏板8。
垃圾袋25封口裝置包括:兩個分別設置于桶體1的桶口處相對兩側的封口氣缸9;其中一個封口氣缸9的活塞桿通過絕緣材料連接一加熱元件;另一個封口氣缸9的活塞桿連接一絕緣木墊,該絕緣木墊上包裹有絕熱布,加熱元件與絕緣木墊平行設置;內膽3的上部內側安裝有位置傳感器10,檢測氣缸的位置,通過PLC控制氣缸的運動啟、停。
智能垃圾桶的內膽3用于盛放垃圾,它包括:兩塊側板11、一塊背板12、一塊底板13,內膽3的兩塊側板11與桶體1的正面內側連接,桶體1的正面開口,開口處滑設一垂直門14,桶體1內安裝有驅動該垂直門14升降的垂直門14驅動氣缸。
智能垃圾桶的垃圾推送機構包括:安裝于內膽3下方的推送氣缸16,該推送氣缸16的活塞桿連接一L形的垃圾推送架17,內膽3的底板13置于該垃圾推送架17上。
智能垃圾桶的換袋裝置包括:a.裝設于桶體1一側外壁上的氣動馬達18,氣動馬達18連接一驅動轉軸19。b.垃圾桶的桶體1與裝有氣動馬達18相對的一側外壁上安裝有從動轉軸21,從動轉軸21上卷設有垃圾袋25卷22。c.桶體1的外壁上于桶壁與驅動轉軸19之間安裝有顏色傳感器20,顏色傳感器20通過垃圾袋25上的顏色帶來檢測垃圾袋25,通過PLC控制器使得馬達將垃圾袋25運送到內膽3中央。d.垃圾袋25卷22,包括長條形的背景布23,背景布23上均勻開設有多個垃圾袋25放置孔24,垃圾袋25放置孔24內設有垃圾袋25,垃圾袋25的袋口與垃圾袋25放置孔24的外周粘貼,背景布23上于相鄰的垃圾袋25放置孔24之間設置有顏色識別帶26。
垃圾桶桶體1的桶口處設有上夾板27和下夾板28,上夾板27的下沿和下夾板28的上沿均設有橡膠墊29,上夾板27長于下夾板28,垂直門14的兩側設有上搭扣和下搭扣31,垂直門14升起時,下搭扣31將上夾板27和下夾板28分開,垂直門14降下時,上搭扣將上夾板27和下夾板28壓合。
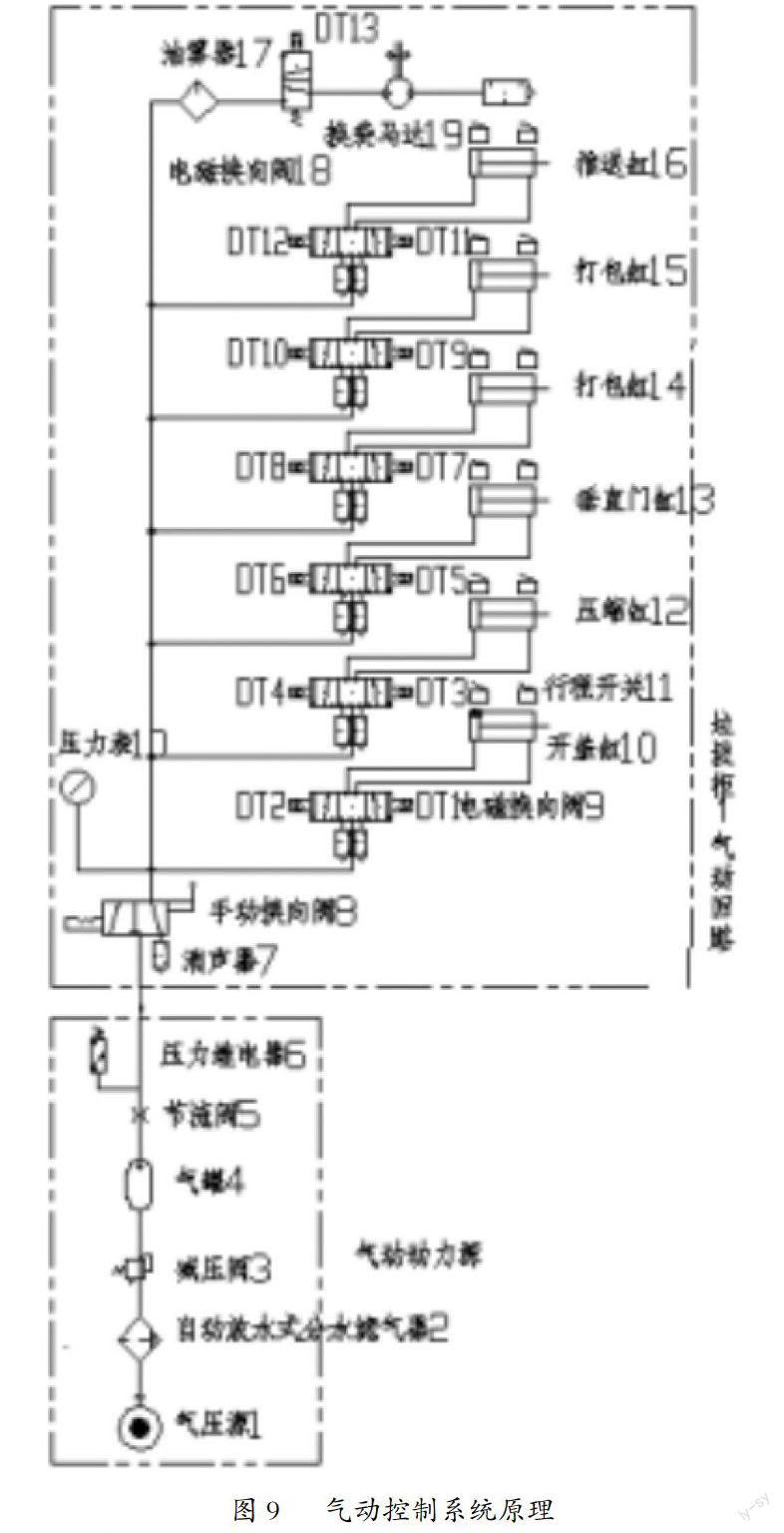
氣動控制系統包括安裝于桶體1內的空氣壓縮機、電磁換向閥、壓力調節閥和流量調節閥,空氣壓縮機與壓力調節閥連接,壓力調節閥與流量調節閥相連,流量調節閥連接電磁換向閥。
三、氣動系統
氣動控制系統原理圖如圖9所示。
1)空氣壓縮機系統1、4:為系統動力源裝置,包括氣泵和氣罐。氣泵采用單泵無油靜音氣壓源,體積小巧,工作安靜,獨立垃圾柜單元所需氣壓源規格為8 m3,而其最大壓力則參考國家標準,選取系統安全壓力1 MPa。氣罐4為消除氣壓源排出的氣流脈動,同時穩定壓縮空氣氣源系統管路和負載壓力,確保氣缸、氣馬達的運動平順性,此外,因氣罐本身就是輔助動力源裝置,它可以降低氣壓源流量配置、減少氣壓源啟動頻率。
2)氣動馬達19和氣缸10、12~16:由氣動馬達19執行垃圾袋的運送,由氣缸10、12~16執行桶蓋開閉等6個機構的運動。其中,開蓋缸10的缸徑32,行程50;壓縮缸12的缸徑20,行程125;垂直門缸13的缸徑20,行程300;打包缸14、15分別用于驅動封口用的加熱元件和絕緣木墊,缸徑20,行程125;推送缸16用于推動垃圾桶的內膽3,以將打包后的垃圾袋推出垃圾桶,推送缸16的缸徑20,行程300。
3)節流閥5:本系統各執行機構中,氣動馬達19所需流量最大,并且速度不能太快以免扯壞圖3所示的垃圾袋卷22,因此,節流閥5首要功能是調節氣動馬達19的速度,節流閥5的第二個功能是,提高各氣缸、氣馬達的運動平順性,以避免氣流過大導致沖擊和噪聲。
4)氣動換向控制閥8、9:三位五通電磁換向閥9共6件,分別用于控制執行氣缸的動作方向,實現開關門、封口、壓縮推送等動作。手動換向閥8用于維修時,將垃圾柜與氣動動力源斷開,同時將內部管路氣體排掉。
5)減壓閥3:用于使系統壓力適應負載需要,同時提高執行機構動作的平順性,以避免氣流過大導致沖擊和噪聲。
四、電控系統
本裝置采用熱融封口,即用電阻絲通電發熱融化塑料,然后冷卻,使塑料垃圾袋口固結。本裝置選用市面上可以買得到的成熟手壓塑料薄膜封口機進行簡單改裝。塑料薄膜封口機主要技術參數如下:
電源電壓220 V,脈沖功率400 W,加熱時間0.2~1.5 s可調。
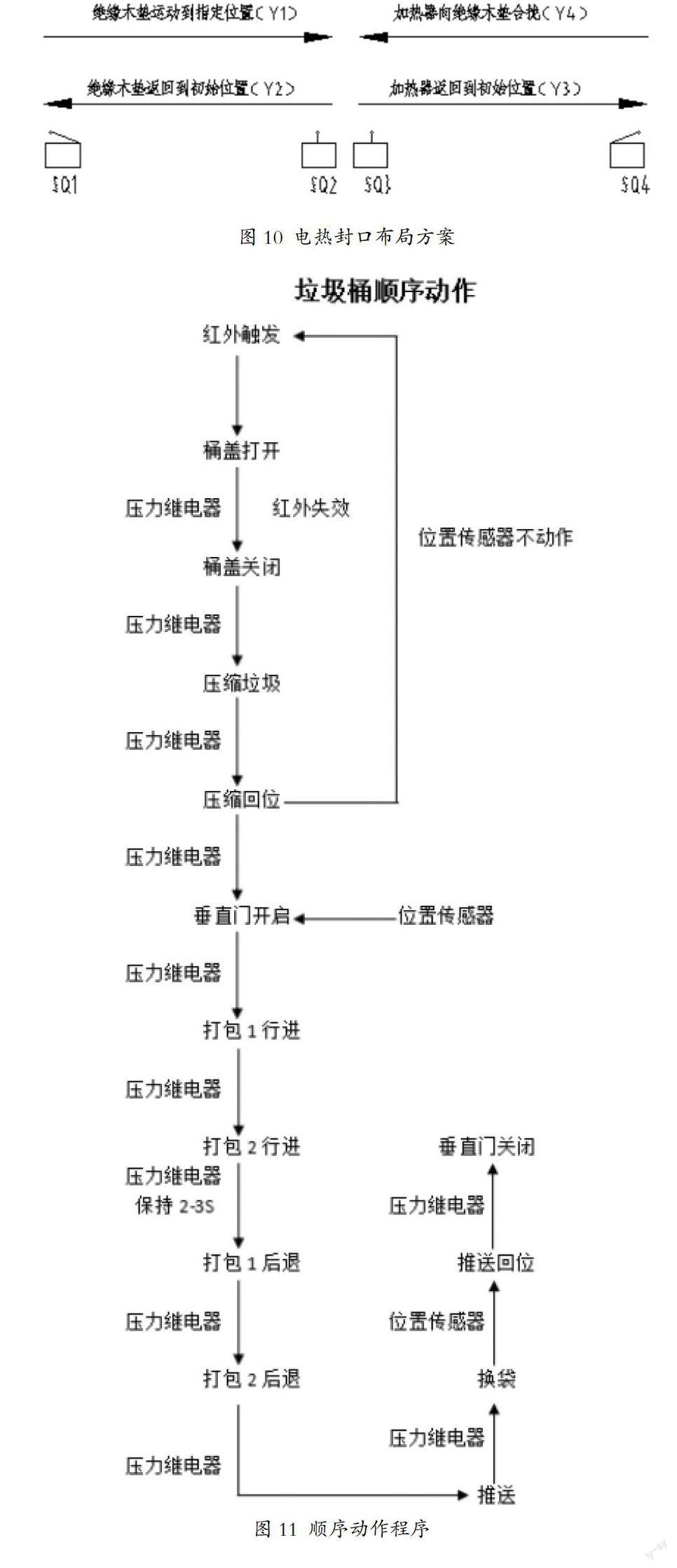
電熱封口布局方案如圖10所示,將封口機的電阻絲加熱器和起墊塊作用的絕緣木墊拆分開來,絕緣木墊和和電阻絲加熱器分別被兩個氣缸控制,氣缸的到位換向由SQ1~SQ4等4個行程開關檢測。
垃圾柜的電氣控制采用通用的PLC程序控制[ 4 ],其順序動作程序如圖11所示。據此設計PLC控制系統的功能圖,并轉換成梯形圖,就可以成為PLC控制程序,從而實現對垃圾柜順序動作過程的控制。
控制電路中,由PLC把脈沖信號CP、方向信號DIR等開展信號發送給電磁換向閥,來控制方向閥的位置、從而控制氣缸的運動方向。
五、結語
1)通過采用多種傳感器檢測相應的控制信號,配合PLC控制器和氣動控制系統,實現了桶蓋開閉、垃圾壓縮、垃圾袋封口、垃圾推送和換袋操作的全自動化作業,實現了垃圾桶的真正的全自動智能化,與普通垃圾桶相比,避免了工作人員與垃圾的直接接觸,更加衛生,工作人員只需隔一段時間安放垃圾袋卷并提走打包好的垃圾袋,省時省力。
2)本文所有操作均采用氣動控制系統,相對于電動控制系統,成本更低、故障更少、可靠性更高、維修方便、能在惡劣環境下工作;同時,由于控制系統以空氣為工作介質,可直接從周圍環境中獲取,該垃圾桶對環境友好,符合綠色設計、綠色制造的要求。
3)本文的垃圾桶采用垃圾袋上端固定狀態下的熱封口技術,相對于現有的皮筋封口及金屬絲封口等技術,垃圾袋封口的成功率更高,封口質量更好。
本文研制成功的全自動智能垃圾柜,經過試驗表明,智能垃圾處理柜噪聲不超過30 dB,表明氣動系統平順性好、無噪聲。分析和試驗表明,該裝置具有較好的推廣應用價值。
(指導老師:蔣志武)
參考文獻:
[1] 李毅華.校園垃圾箱的設計與制造[J].數據采集與處理,科技經濟市場,2011(10):24-26.
[2] 張存明.連體垃圾壓縮箱的進料系統設計方案的分析[J].裝備制造技術,2012(3):21-24.
[3] 蔣伍.智能垃圾收集箱設計[J].科技風,2016(4):126-127.
[4] 范金玲.基于PLC的氣動機械手控制系統設計[J].液壓與氣動,2010(7):36-38.
作者簡介:
羅萱格 (1999-),女,漢族,湖南長沙人,高中學生。
指導老師簡介:
蔣志武(1973-),男,漢族,湖南長沙人,本科,中教一級/教師,研究方向:物理教育學與應用物理學。
