主被動傳感器空時對準融合模型目標跟蹤技術*
2016-07-21 06:44:49盛丹王國宏孫殿星楊忠
現代防御技術 2016年3期
盛丹,王國宏,孫殿星,楊忠
(海軍航空工程學院 信息融合研究所,山東 煙臺 264001)
?
探測跟蹤技術
主被動傳感器空時對準融合模型目標跟蹤技術*
盛丹,王國宏,孫殿星,楊忠
(海軍航空工程學院 信息融合研究所,山東 煙臺264001)
摘要:針對主被動傳感器量測的時空不同步和定位的非線性,以提高跟蹤精度為目的,構建了空時對準融合跟蹤模型。通過牛頓插值法實現了時空量測的同步,并基于融合算法建立了模型的濾波算法。最后,在勻速直線運動目標和機動目標的背景下驗證了時空對準融合跟蹤模型對目標的跟蹤效果,在主被動傳感器信息利用、提高精度等方面具有一定的理論和實際意義。
關鍵詞:主被動傳感器;牛頓插值法;同步;融合;目標跟蹤;粒子濾波
0引言
在激烈的電子偵察與反偵察斗爭中,壓制干擾[1-3]對傳感器的檢測、識別、跟蹤[4-5]等性能產生了嚴重的影響,嚴重制約和限制了傳感器的作用范圍,甚至對傳感器自身的生存造成威脅。多傳感器信息融合[6]是一種有效的抗壓制干擾途徑,目前該方向的研究主要有2方面:一方面是壓制干擾下多傳感器信息融合的目標檢測性能;另一方面是在強壓制干擾通過測向交叉定位[7-8]進行目標定位和跟蹤。被動傳感器可以獲得輻射源的方向,因此,嚴重干擾下可以通過測向交叉定位進行目標定位和跟蹤。文獻[9]假設目標到雷達基線的距離為常數的條件下研究了傳感器的布局問題。文獻[10]給出在最小定位模糊區面積準則下多個被動傳感器的布站準則。文獻[11]將目標到基線的垂直距離與基線長度的比值作為約束條件,通過拉格朗日乘子法求得無源定位系統中的最優交會角。文獻[12]給出了2部2D被動傳感器在方位和俯仰測角誤差不同的情況下,最優交會角與俯仰角的關系。但是,交叉定位的定位精度一般較低,而采用主被動傳感器[13]量測信息融合目標跟蹤也是一種有效的壓制干擾下目標跟蹤方法。文獻[14]構建了STMHM算法解決了目標的實時跟蹤和識別,被動傳感器主要用于目標識別。文獻[15]研究了如何合理、實時地切換主被動傳感器的問題。
1時空校準目標定位
1.1問題描述
采用1部主動傳感器(傳感器1)和1部被動傳感器(傳感器2)進行目標跟蹤,空中目標為壓制干擾機。主被動傳感器目標定位如圖1所示。
圖1 主被動傳感器目標定位示意圖Fig.1 Diagram of target location with passive and active sensors
1.2時間校準
一般情況下,主被動傳感器的采樣頻率不同,主動傳感器的數據率要低于被動傳感器,即相同時間內主動傳感器獲得的數據批數要少于被動傳感器,要進行信息的融合,需要首先進行時間和空間對準。假設兩部傳感器的數據是在同一坐標系下測得的,因此,量測數據在空間上是一致的,只需進行時間校準。
取一段較短時間進行時空對準說明,定義目標出現時被動傳感器的量測數據按照0時刻初始化,在相對時間t主動傳感器獲得量測,假設主、被動傳感器的測量間隔分別為T,T*,目標量測空間及融合空間如圖2所示。
高職教育的專業建設,直接決定著該專業學生該學什么、學到什么程度和怎么學的問題。所以,專業建設直接規定著工匠精神培育當中的“術”的層面的要求。為此,必須積極推動高水平的專業建設來確保技能型人才的培養方向。
圖2 目標量測融合空間Fig.2 Fusion space of target measurements

(1)
(2)
時間對準后,主被動傳感器的方位觀測得以空間對準,可以采用主動定位、主被動交叉定位、融合定位等方法獲得目標的位置估計。
2目標定位算法
根據圖1,主動定位獲得的目標位置估計為

(3)
主被動傳感器交叉定位獲得的目標位置估計為

(4)
融合定位采用數據壓縮將主動定位與交叉定位結果進行加權融合,融合權重為

(5)

(6)


(7)
融合后協方差為

(8)
定位的效果可以采用定位誤差來進行衡量,目標位置的均方根誤差為
(9)
結合3種定位方法的定位協方差關系,可以判斷融合定位具有較優的定位效果。
3空時對準融合模型的濾波算法
在直角坐標系中,目標狀態方程可以采用線性模型,便于預測和濾波,而傳感器的量測是在視線坐標下獲得的,因此在直角坐標系中建立的量測方程是非線性的,從而在校準空間構建非線性濾波模型,而粒子濾波不受線性化誤差或高斯噪聲假定的限制,適合于任何環境下的任何狀態轉化或量測模型。采用融合定位時空時對準融合模型的濾波流程如圖3所示。
圖3 空時對準融合模型濾波算法流程Fig.3 Flow chart of the filtering algorithm of the STFM
目標的狀態方程可以表示為
X(k+1)=FX(k)+Γ(k)V(k),
(10)

(11)
量測方程為
Z(k+1)=h(k+1,X(k+1))+W(k+1),
(12)
式中:W(k+1)為0均值高斯量測噪聲。
對傳感器1,有
h1(k+1,X(k+1))=

(13)

X(k+1))+W1(k+1).
(14)
對傳感器2,有

(15)
Z2(k+1)=θ2(k+1)=h2(k+1,X(k+1))+
W2(k+1),
(16)
分別進行傳感器1主動定位和傳感器1,2交叉定位,并將定位結果通過數據壓縮加權融合,所得結果定義為量測,如式(7)所示。
獲得目標量測后,可以根據后驗概率密度p(X0∶k|Z1∶k)進行采樣,由于直接從p(X0:k|Z1∶k)中采樣比較困難,通常用重要性概率密度π(X|Z)獲取樣本值,據此得到k時刻隨機樣本第i個樣本的權重為
(17)
濾波過程中可以近似為

(18)
式中:zi(k+1)為粒子的量測預測。對于時間的增長帶來的粒子權值協方差變大的現象,采用重采樣的方法將粒子重新排序,將權重大的粒子進行歸一化融合。
4仿真分析
假設目標為壓制干擾機,主動傳感器不受干擾,能夠獲得目標的距離和方位量測,被動傳感器能夠獲得目標的方位量測,2部傳感器位置分別設定為(0,0)km和 (30,0)km,角度量測誤差標準差相同,設定為σθ1=σθ2=0.1°,主動傳感器的距離量測誤差為σr=100m。主動傳感器的采樣周期為1s,被動傳感器的采樣周期為0.5s,主被動傳感器各量測50個周期。蒙特卡羅仿真100次。
分別驗證對勻速直線運動目標和曲線運動目標的跟蹤效果。勻速直線運動目標初始位置為(10,25)km,初始速度為(200,0)km。曲線運動目標的初始位置為(10,25)km,初始速度為(300,0)km,加速度設定如表1所示。

表1 曲線運動目標加速度
(1) 時空對準前后3種定位方法的平均誤差仿真結果與分析,如表2所示。

表2 時空對準前后定位方法跟蹤效果比較
從表2中可以看出:方位距離的定位效果變換不大,這是因為對準時刻是以主動傳感器的量測時刻為準進行的。交叉定位的平均定位誤差要低于主動傳感器的定位誤差,這是因為在本試驗條件設定下,傳感器的布局導致交叉定位的效果優于主動傳感器定位效果。從平均誤差可以看出融合定位占有明顯的優勢。
(2) 空時對準后的目標跟蹤效果仿真結果及分析。
1) 勻速直線運動目標跟蹤效果,見圖4,5。
2) 機動目標跟蹤效果,見圖6,7。
從圖5,7可以看出,融合定位方法的總體效果明顯優于其他2種方法,不受傳感器與目標的布局影響,而交叉定位方法效果受傳感器與目標布局影響較大。另外傳感器與目標的布局也影響著濾波誤差的收斂性。
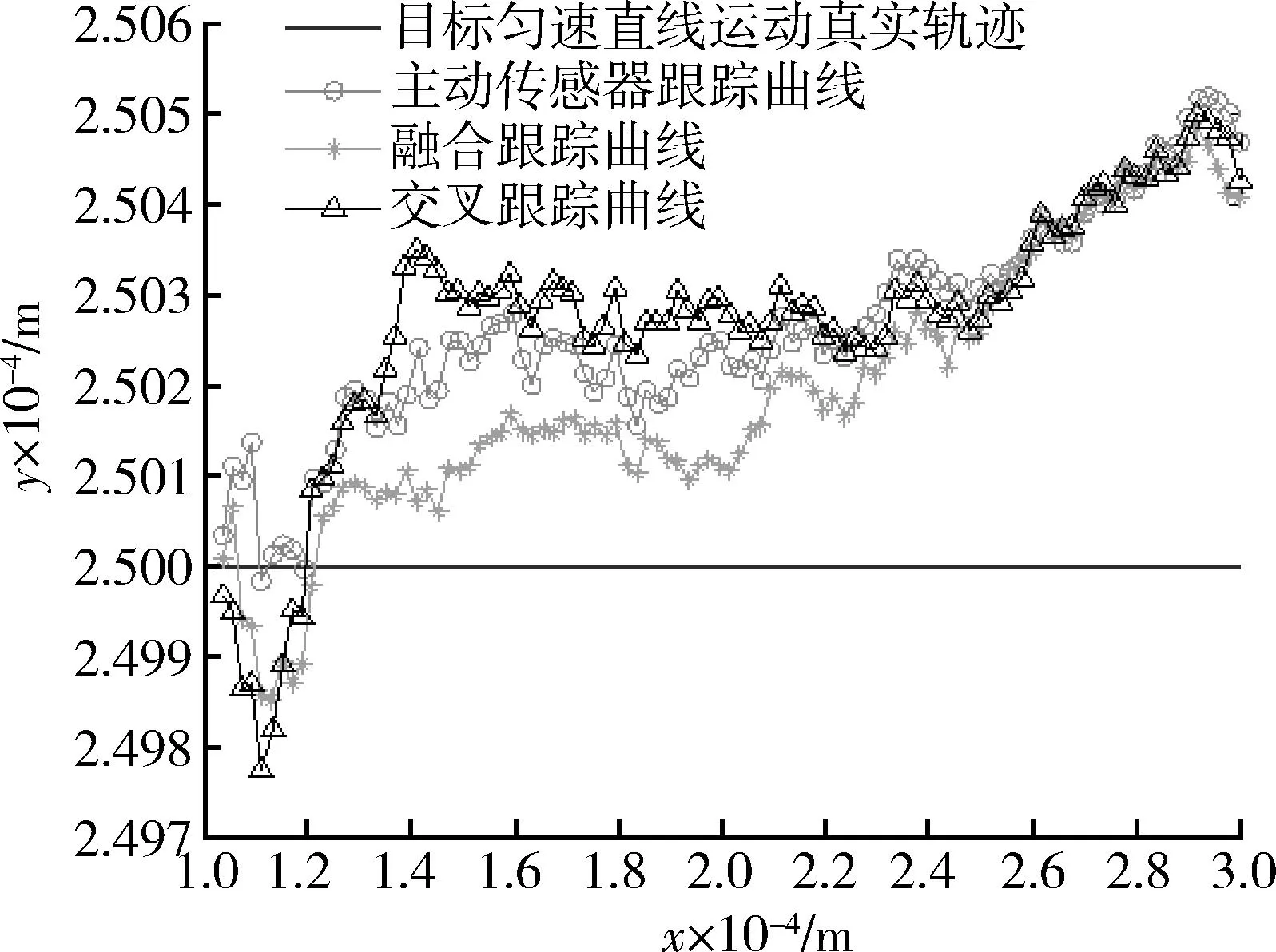
圖4 3種方法跟蹤效果圖Fig.4 Tracking results of three methods
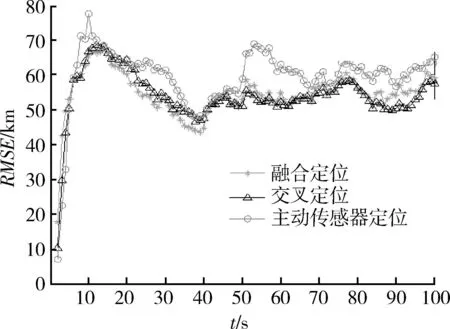
圖5 3種跟蹤方法距離誤差Fig.5 Range errors of the three methods
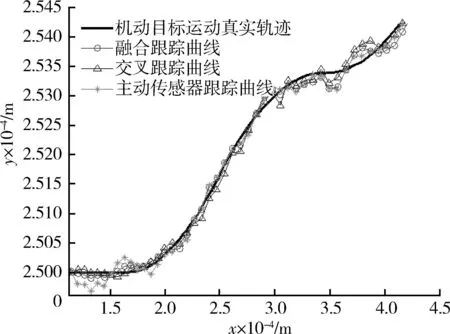
圖6 3種方法跟蹤效果圖Fig.6 Tracking results of three methods
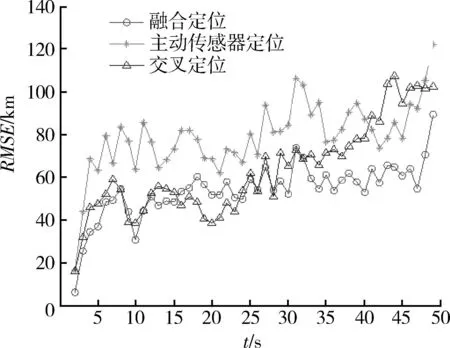
圖7 3種跟蹤方法距離誤差Fig.7 Range errors of the three methods
5結束語
采用主被動傳感器對目標進行跟蹤時,量測信息往往是不同步的,本文構建了空時對準融合跟蹤模型。牛頓插值法實現了主被動傳感器量測的同步,融合定位方法能夠得到較高的定位精度,建立的模型的濾波算法能夠實現機動目標和非機動目標的較精確跟蹤。這在主被動傳感器目標跟蹤時量測信息的融合及跟蹤精度的提高等方面都具有一定的實用價值。
參考文獻:
[1]JINGJ,WENS.SimulationonDetectionProbabilityLossofOTHRUnderOppressiveActiveJamming[J].AppliedMechanicsandMaterials, 2014, 701: 544-548.
[2]ZHANGQY,CAOB,WANGJ,etal.PolarizationFilteringTechniqueBasedonObliqueProjections[J].ScienceinChina:InformationSciences,2010(5):1056-1066.
[3]王象, 楊建華, 閔濤, 等. 基于雷達對抗試驗等效推算的密集壓制干擾研究方法[J].宇航學報, 2012 , 33 (2):217-221.
WANGXiang,YANGJian-hua,MINTao,etal.StudyonDensenBarrageJammingBasedonEquivalentReckoningofRadarECMTest[J].JournalofAstronautics,2012,3(2):217-221.
[4]LID,LIUJian-ye,QIAOLi,etal.FaultTolerantNavigationMethodforSatelliteBasedonInformationFusionandUnscentedKalmanfilter[J].JournalofSystemsEn-
gineeringandElectronics, 2010, 21(4):682-687.
[5]YANXue-hua,LIUYun-gang.GlobalPracticalTrackingNonlinearSystemswithbyOutput-FeedbackforUnknownGrowthRate[J].ScienceinChina:TechnologicalSciences,2011, 54(10): 2079-2090.
[6]周衛東,劉萌萌,楊永江.基于多傳感器信息融合理論的交互式多模型算法[J].華南理工大學學報:自然科學版,2014,42(9):82-89.
ZHOUWei-dong,LIUMeng-meng,YANGYong-jiang.AnImprovedInteractingMultipleModelAlgorithmBasedonMulti-sensorInformationFusionTheory[J].JournalofSouthChinaUniversityofTechnology:NaturalScienceed, 2014, 42(9):82-89.
[7]HATEMH,KUTLUYILD.PassiveLocalizationofScanningEmitters[J].IEEETransactionsonAerospaceandElectronicSystems,2010,40(5):907-910.
[8]CAOY,Mike,CHENSW.Cross-LayerModelingandSimulationofCircuitReliability[J].IEEETranctionsonComputer-AidedDesignofIntegratedCircuitsandSystems,2014, 33(1):8-23.
[9]修建娟,何友,王國宏.測向交叉定位系統中的交會角研究[J].宇航學報,2005,26(3):282-286.
XIUJian-juan,HEYou,WANGGuo-hong.StudyonCutAngleofDirectionFindingLocationSystem[J].JournalofAstronautics, 2005, 26(3):282-286.
[10]WANGGH,BAIJ,HEY,etal.OptimalDeploymentofMultiplePassiveSensorsintheSenseofMinimumConcentrationEllipse[J].IETProceedingsonRadar,Sonar&Navigation,2009,3(1):8-17.
[11]白晶,王國宏,王娜,等.測向交叉定位系統中的最優交會角研究[J].航空學報,2009,30(2):298-304.
BAIJing,WANGGuo-hong,WANGNa,etal.StudyonOptimumCutAnglesinBearing-onlyLocationSystems[J].JournalofAstronautics, 2009,30(2): 298-304.
[12]王國宏,蘇偉,白晶,等.不同量測誤差情況下1D和2D被動傳感器交叉定位系統最優交會角研究[J].電子學報,2009,37(6):1296-1299.
WANGGuo-hong,SUWei,BAIJing,etal.StudyonOptimalCutAnglein1Dand2DPassiveSensorTriangulationwithDifferentMeasurementErrors[J].ActaElectronicaSinica,2009, 37(6):1296-1299.
[13]吳振輝,董朝陽.主/被動雷達H∞濾波的最小方差數據融合算法[J].系統仿真學報,2006,18(10):769-772.
WUZhen-hui,DONGChao-yang.MinimumMeanVarianceDataFusionAlgorithmUsingH∞FilterBasedonActive/PassiveRadar[J].JournalofSystemSimulation,2006, 18(10):769-772.
[14]蘆建輝,陳東鋒,萬朝江,等.主被動傳感器實時信息融合的STMHM算法[J].電子學報,2012,40(9):1740-1745.
LUJian-hui,CHENDong-feng,WANChao-jiang,etal.STMHMAlgorithmofActiveandPassiveSensorsReal-TimeDataFusion[J].ActaElectronicaSinica,2012, 40(9):1740-1745.
[15]單甘霖,張子寧.面向目標跟蹤的單平臺主被動傳感器長期調度[J].系統工程與電子技術,2014,36(3):458-463.SHANGan-lin,ZHANGZi-ning.Non-MyopicSensorSchedulinginaSinglePlatformforTargetTracking[J].SystemsEngineeringandElectronics,2014, 36(3):458-463.
Optimal Target Location with Active and Passive Sensors
SHENG Dan,WANG Guo-hong,SUN Dian-xing,YANG Zhong
(Naval Aeronautical Engineering Institute,Institute of Information Fusion, Shangdong Yantai 264001, China)
Abstract:Aiming at desynchrony of the time and space and the nonlinearity of the measurements, a space-time-fusion tracking (STFM) model is established to improve the tracking precision. With the Newton interpolation, the measurements in different time and space can be synchronic. Then several methods of target position estimation are compared, and based on the best a filtering algorithm of the model is established. Lastly, on the background of uniform linear motion and maneuvering targets, the effect of the STFM is verified and the corresponding conclusion has some theoretical and practical significance in information utilization of active and passive sensors and precision improving.
Key words:active passive sensor; newton interpolation; synchrony; fusion; target tracking; particle filtering
*收稿日期:2015-08-10;修回日期:2015-09-21
基金項目:國家自然科學基金(61179018, 61002006);“泰山學者”建設工程專項經費資助課題
作者簡介:盛丹(1983-),女,山東煙臺人。博士生,主要研究方向為無源定位、目標跟蹤。
通信地址:264001山東省煙臺市芝罘區二馬路188號航院信息融合研究所E-mail:2855221900@qq.com
doi:10.3969/j.issn.1009-086x.2016.03.019
中圖分類號:TN958.93;TP212;TP391.9
文獻標志碼:A
文章編號:1009-086X(2016)-03-0116-05
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
教學與管理(中學版)(2016年12期)2017-01-07 09:52:32
商情(2016年42期)2016-12-23 14:26:58
美與時代·城市版(2016年8期)2016-11-10 01:02:17
中國科技博覽(2016年12期)2016-05-09 03:53:41
