基于視覺的四旋翼無人機目標跟蹤系統設計
2016-07-31 21:17:27姜俊俊
中國科技信息 2016年14期
關鍵詞:系統
姜俊俊 李 明 張 宇
沈陽航空航天大學航空航天工程學部
基于視覺的四旋翼無人機目標跟蹤系統設計
姜俊俊 李 明 張 宇
沈陽航空航天大學航空航天工程學部
四旋翼無人機也稱四軸飛行器、四旋翼無人飛行器,是一種能垂直起降的無人飛機。它有四個螺旋槳,通過改變自身螺旋槳轉速實現各種飛行動作。
和固定翼無人機相比,四旋翼無人機有著很好的運動特性,可以在狹小區域垂直起降,可以在固定目標上懸停監視,同時還可以貼地飛行從而有效的躲避雷達探測。同無人直升機相比,四旋翼無人機的機械結構比較簡單,由于通過平衡四個螺旋槳產生的升力來實現穩定的盤旋和精確飛行,比較容易控制。
四旋翼無人機的上述特點,使得其非常適合做為在復雜的城市環境或山區下,用于對目標偵測和跟蹤設備的機載平臺。在這種環境下,小型四旋翼無人飛機能夠垂直起降,具有“懸停和凝視”目標能力,而且還可以抵近建筑物飛行,對目標物提供精確定位,而且能依靠四個螺旋槳產生的升力進行姿態與位置控制。
本文提出一種基于APM的四旋翼無人機搭載無線攝像頭的目標跟蹤系統。
以四旋翼無人機為平臺,以攝像頭為傳感器,建立的目標跟蹤系統,可以在低空、低速的條件下,對地面目標進行實時的跟蹤飛行,在軍事和民用方面有著廣闊的應用前景。在軍事方面,該系統能夠從狹小地域上放飛、在復雜空情中靈活機動的完成低空的偵察任務,監視戰場進行損傷評估等。在警用方面,可以在反恐任務中監視犯罪分子的活動,也可完成緝毒和反走私任務。同時,在民用方面同樣大有可為,可負責重大的自然災害后的監視巡邏和跟蹤目標的任務,可進行大橋、高壓線、水壩以及地震后路段的檢查,航拍和成圖,可用于空中監視城市的環境狀況和交通狀況,還可用在地質環境的監測上。因此,研究基于視覺的四旋翼無人機目標跟蹤系統具有重要的科學意義。
系統總體方案設計
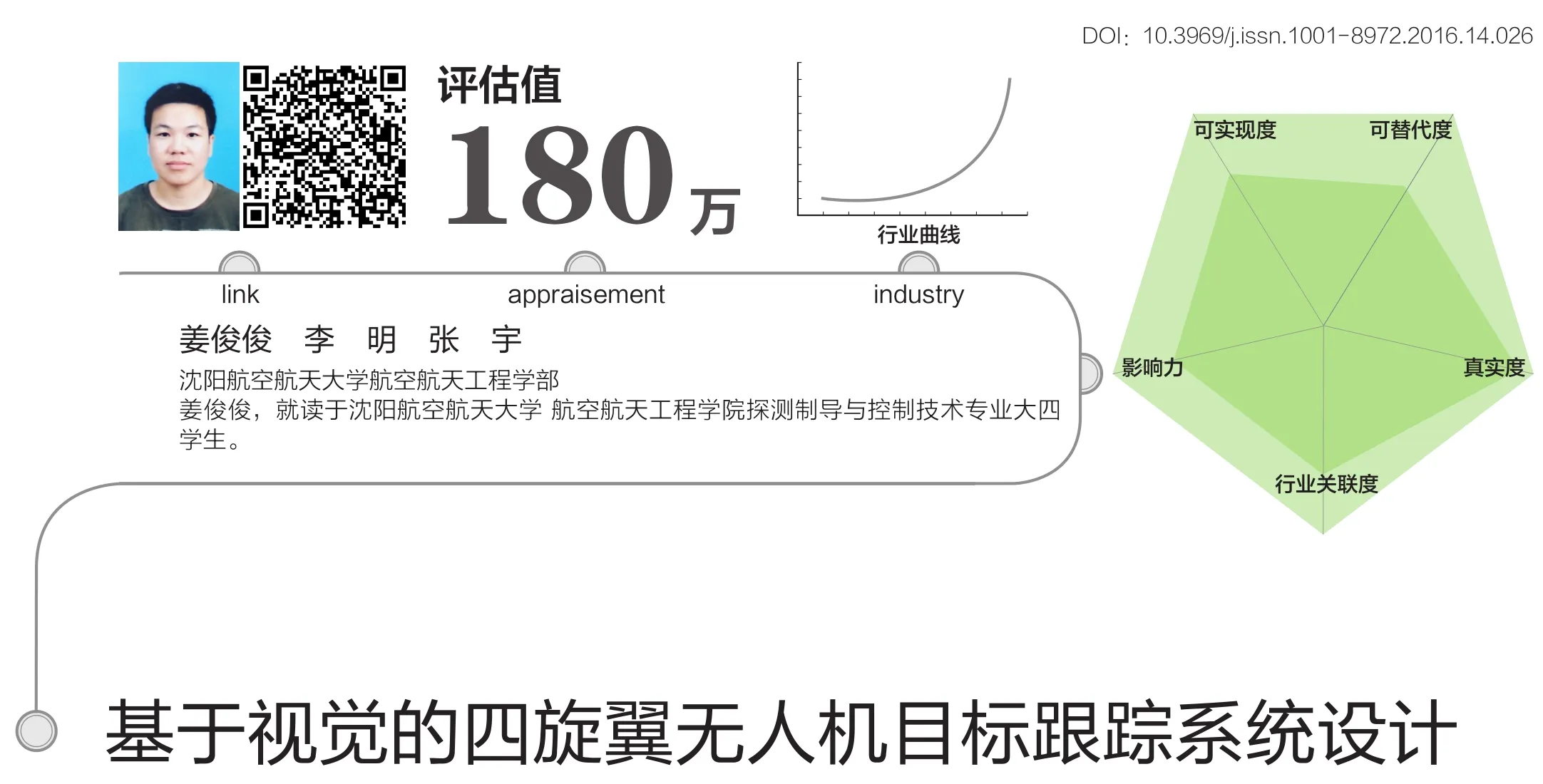
本項目設計并開發的基于視覺的四旋翼無人機跟蹤系統,主要包含了APM(ArduPilotMega)飛控板、攝像頭和圖像傳輸模塊以及數據傳輸模塊四個主要模塊。該系統的結構如圖1所示。圖像傳輸模塊固定在四旋翼上。跟蹤開始時,攝像頭觀察運動物體的位置,完成視場內視頻圖像的拍攝,拍攝的視頻圖像通過無線視頻傳輸方式傳到地面PC機,用于圖像處理,以獲得目標位置。
四旋翼無人機飛行原理
四旋翼無人飛機是由固定在剛性十字交叉的結構上四個獨立的電機驅動的系統。四只螺旋槳分別安裝在十字形機體的四個頂點位置,首先規定了一個正方向,位于同一對角線上兩只螺旋槳為同一組,左右電機安裝正槳逆時針旋轉(產生順時針方向的扭矩),前后電機安裝反槳并且順時針旋轉(產生順時針方向的扭矩),因此連接在同一十字架結構上可以抵消兩兩相互之間的反扭距,通過控制四個電機的轉動速度來實現飛行器的飛行控制。
根據飛行器的飛行原理可以知道,飛行器的飛行狀態主要包括偏航飛行,左右(橫滾)飛行,前后(俯仰)飛行以及懸停;
(1)懸停飛行:如圖2.1所示,四個旋翼以相同轉動速度旋轉時可以抵消兩兩相互之間的反扭力矩;懸停飛行模式通過同時增大或同時減小四個旋翼的轉速,實現飛行器上升或者下降運動;
(2)俯仰或者橫滾飛行:如圖2.2所示,由于飛行器結構的對稱,對角線方向增加其中一個螺旋槳的轉速,同時減小另一個螺旋槳的轉速,實現俯仰或者橫滾飛行運動;
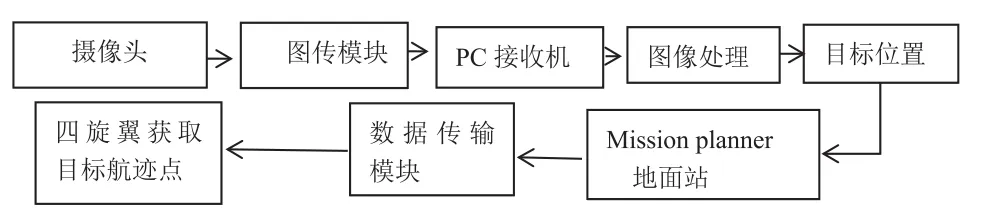
圖1 基于視覺的四旋翼無人機目標跟蹤系統結構圖
圖2 四旋翼無人機飛行原理示意圖
(3)偏航飛行:如圖2.3所示,增加對角線一組螺旋槳的轉速,同時等量減小另一組對角線螺旋槳的轉速,實現飛行器偏航運動。
硬件系統設計
(1)主控單元選擇
ArduPilotMega(APM)是市面上比較強大的基于慣導的開源自駕儀。
特性包括:
免費的開源固件,支持多旋翼(四旋翼,六旋翼等),飛機("ArduPlane”),地面車輛("ArduRover”)以及直升機("ArduCopter”)。
通過點擊式的工具簡單設置和上傳固件。
通過點擊式的桌面程序完全的規劃任務腳本。
可以支持上百個三維航點。
使用MAVLink協議,支持飛行中的控制命令模式和雙向遙測功能。
多種免費的地面站平臺,包括Mission planner,支持任務規劃,空中參數調整和完整的帶回放的數據記錄。
跨平臺性。支持Windows,Mac以及Linux。在Windows下使用圖形任務規劃設置的工具(Mac下可用模擬器)或者在任何操作系統下使用命令行界面。以上三種操作系統都有可用的地面站開發源程序。基于Arduino編程環境編寫,也是完全跨系統的。
自動起飛,降落和特殊的動作命令,例如視頻和照相控制。
(2)攝像頭的選擇
根據本系統要求選定的帶云臺的高清航拍攝像頭。如圖3所示。
(3)無線傳輸模塊
無線傳輸模塊包括無線圖像傳輸模塊和無線數據傳輸模塊。無線圖像傳輸模塊采用創興科BOSCAM 5.8G 32頻點圖像傳輸模塊,該模塊包含無線圖像發送模塊(TS832)和無線圖像接收模塊(RS832),如圖4所示。無線數據傳輸模塊采用3DR 433MHz數據傳輸模塊,該模塊包含無線數據發送和無線數據接收模塊,如圖5所示。

圖3 攝像頭

圖4 圖像傳輸模塊

圖5 數據傳輸模塊
四軸飛行器的軟件設計
四軸飛行器的軟件設計主要包括PC機處理接收機接收的圖像信息以及Mission Planner地面站的二次開發,用于將目標的位置轉化為航跡點,實時發送至四旋翼,達到跟蹤目標的目的。整體軟件在Visual Studio環境下采用C#語言編寫。
在視覺跟蹤系統中,要保證目標始終在攝像機視野范圍內,這是實現視覺導航和四旋翼控制前提,比較常見的辦法是安裝攝像機云臺,控制云臺的三維姿態使目標始終位于攝相機的圖像中心位置。當目標丟失的時侯,要采取比較恰當的搜索方法,使得目標位于圖像的中心位置,常見的搜索方法是固定航線搜索機制同時控制攝像機云臺視角,使得目標位于圖像的中心,實現搜索到目標。由于考慮到四旋翼機載重量的限制,所以選用的跟蹤平臺不帶攝像機云臺,采用四旋翼機載單目固定的攝像機結構,故而選取提升四旋翼飛行高度的搜索方法。當丟失目標以后,首先要根據目標預測的運動軌跡跟蹤一會兒,在搜索不到目標的情況下使用爬升搜索模式。當搜索到目標后立刻切換到跟蹤模式。四旋翼跟蹤移動目標的飛行方式流程圖如圖6所示。當接到地面站發送移動目標方位命令給四旋翼后,首先要進行目標搜索直到目標進入機載相機的視野,然后根據目標移動的信息進行目標軌跡預測,再根據預測的運動軌跡進行四旋翼的跟蹤控制模式,實現對地面移動目標的實時跟蹤。
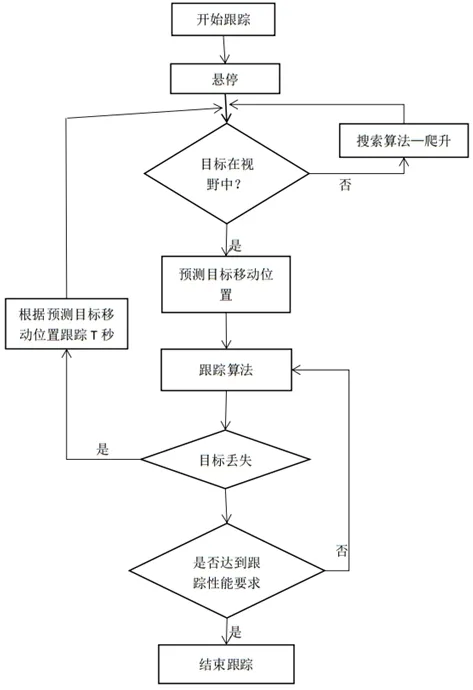
圖6 跟蹤流程圖
結語
本文描述了一個簡易四軸飛行器系統的設計并搭載圖像傳輸模塊實現目標的跟蹤,整個方案分為APM控制板和攝像頭及圖像傳輸模塊,數據傳輸模塊四部分,通過無線數據模塊進行控制通信。圖像傳輸模塊用于將采集的圖像傳輸至PC機,用于地面控制四旋翼無人機跟蹤目標。APM飛控板采用一體設計使得系統簡單、緊湊,圖像傳輸模塊使得圖像采集簡單易行,且不影響主控制器處理速度,最終實現飛行器的基本運動以及圖像的實時傳輸。實踐證明,該四軸飛行器飛行穩定、可靠,圖像畫面及時,清晰,取得了較好的效果。
姜俊俊,就讀于沈陽航空航天大學 航空航天工程學院探測制導與控制技術專業大四學生。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32