齒輪副雙重性的分析研究
2016-08-01 19:55:39張君彩陳青果
考試周刊 2016年56期
張君彩+陳青果
摘 要: 許多平面機構中含有齒輪副,齒輪副的性質不唯一,具有雙重性,有時為高副,有時又是低副,致使在求解含有齒輪副的平面機構自由度時常出現計算錯誤。通過具體分析,本文對齒輪副的性質給出了有效的判別方法。
關鍵詞: 齒輪副 雙重性 自由度
機構是機器中執行機械運動的裝置,齒輪機構因傳動比準確、效率高、參數范圍廣而成為機器中最常見的傳動裝置,正確理解齒輪副的性質是保證含有齒輪副機構自由度計算過程的前提,從而為確定原動機的數量與性質提供依據。在《機械原理》教材中,按運動副元素不同將運動副分為高副和低副,兩構件通過點、線接觸形成的運動副為高副,齒輪副為線接觸故為高副,但教學中發現,單純將齒輪副作為高副計算平面機構的自由度有時與實際工作狀態不符,造成學生理解困難。因此,本文根據不同具體情況,對齒輪副的性質做了詳細分析,使機構理論計算與實際運動狀態一致。
1.齒輪副的性質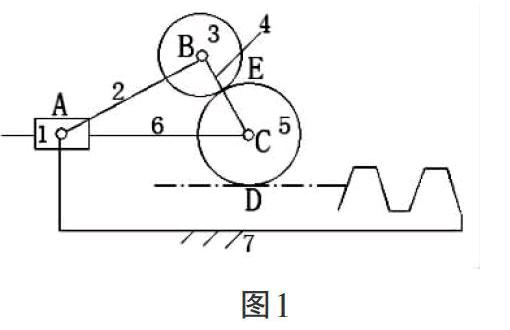
兩構件直接接觸形成的可動連接稱為運動副,教材中規定由點、線接觸形成的運動副為高副。但兩構件單點接觸和雙點接觸對其運動性質的影響有所不同,則運動副性質發生變化,齒輪副具有雙重性。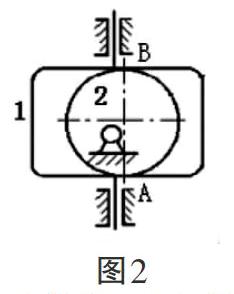
如圖2所示,構件1和構件2之間按接觸性質形成高副,A、B處存在高副,且公法線重合,其中一個高副為虛約束去掉,因此,構件1、2形成一個高副。如圖3所示,構件1和構件2之間按接觸性質形成高副,有兩處存在高副,且公法線n—n與m—m平行,一個高副引入一個約束即失去一個自由度,兩個高副則失去兩個自由度,因此,構件1、2只能相對移動,構件1、2形成一個移動副。如圖4所示,構件1和構件2之間按接觸性質形成高副,也有兩處存在高副,但公法線n—n與m—m不是平行而是相交,此時,構件1、2只能相對轉動,構件1、2形成一個轉動副。由上述分析說明,對于兩構件由點、線形成的運動副,若兩構件為單點接觸存在一個高副、兩點接觸存在一個低副(轉動副或移動副)。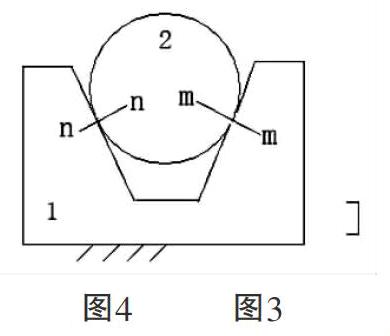
齒輪副為線接觸,理論上為高副。一對齒輪形成的嚙合傳動,正確區分單點接觸和雙點接觸是確定齒輪副是高副或是低副的關鍵,齒輪副的雙重性是機構自由度機算的核心內容之一。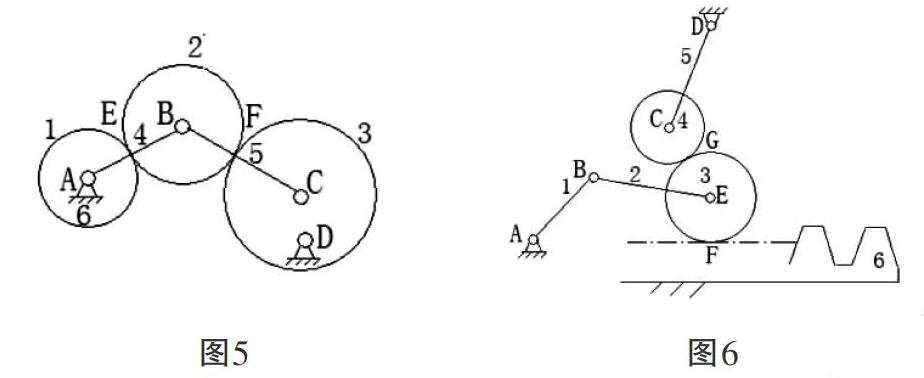
本文通過對齒輪副的分析研究,使概念更清楚,機構自由度計算結果與實際應用相一致。并通過課堂教學驗證,學生易于理解和掌握,為進一步學習打下良好基礎。
參考文獻:
[1]孫桓.機械原理(第六版)[M].高等教育出版社,2000.
[2]孫桓.機械原理教學指南[M].高等教育出版社.
[3]黃錫愷,鄭文緯.機械原理(第六版)[M].高等教育出版社,1995.
基金項目:河北科技大學理工學院資助項目(2008Y06)