一種GPS單頻相對定位的動態(tài)初始化方法*
2016-08-09 18:54:08陳萬通李小強
航天控制 2016年2期
陳萬通 李小強
1.中國民航大學電子信息工程學院, 天津300300 2.北京航空航天大學電子信息工程學院, 北京100191
?
一種GPS單頻相對定位的動態(tài)初始化方法*
陳萬通1李小強2
1.中國民航大學電子信息工程學院, 天津300300 2.北京航空航天大學電子信息工程學院, 北京100191

GPS相對定位的初始化過程一般要求基線處于靜止狀態(tài),且要求在觀測過程中可見星數(shù)目保持不變,不利于高動態(tài)載體在遮擋環(huán)境中的應用。針對此問題,本文提出一種動態(tài)初始化方法,能夠有效處理遮擋所造成的頻繁的衛(wèi)星起落現(xiàn)象,同時充分利用歷史觀測與當前觀測方程中部分模糊度分量的關(guān)聯(lián)性,縮短初始化時間。實際的動態(tài)試驗表明,該方法可以在載體動態(tài)狀態(tài)下短時內(nèi)完成模糊度解算的初始化,并且整周模糊度估計的成功率對衛(wèi)星起落次數(shù)不敏感。 關(guān)鍵詞 全球定位系統(tǒng);相對定位;整周模糊度;短基線;浮點解
GPS相對定位技術(shù)是目前GPS定位中精度最高的一種,該技術(shù)廣泛應用于大地測量、精密工程測量、地球動力學研究和精密導航等領(lǐng)域。與常規(guī)的單點定位技術(shù)不同,該技術(shù)利用高精度測量的載波相位信號構(gòu)建觀測方程,通過差分手段削減電離層和對流層誤差、軌道誤差、衛(wèi)星和接收機時鐘誤差,進而實現(xiàn)高精度的相對定位,基線測量精度可達亞厘米級[1]。但由于載波是一種周期性的正弦信號,進行相位測量時存在觀測信號的整周模糊度問題,這正是載波相位測量的技術(shù)難點[2],只有正確求得初始時刻的整周模糊度,高精度的相對定位才可以實現(xiàn),該過程通常需要多個歷元的聯(lián)合估計,一般采用遞歸最小二乘求解整周模糊度的浮點解[3],通過LAMBDA算法獲取固定解,完成初始時刻整周模糊度解算的過程叫初始化[4]。然而,對于某些特殊應用,初始化必須在載體的動態(tài)過程中完成,由于載體和衛(wèi)星相對于地表建筑物的運動,接收機難以實現(xiàn)對初始可見星的持續(xù)跟蹤,經(jīng)常遇到衛(wèi)星因失鎖而“落下”或因脫離遮擋環(huán)境而重新被跟蹤,進而導致衛(wèi)星數(shù)目隨時間呈現(xiàn)動態(tài)變化,若仍采用靜態(tài)初始化手段,只能針對變化后的可見星將算法重新初始化,或者收集一段時間數(shù)據(jù)后選取多個歷元的公共衛(wèi)星解算,在實際應用中缺乏靈活性,經(jīng)常因為算法的多次重新初始化或滯后處理延長了初始化的時間,進而影響相對定位系統(tǒng)的可用性[5]。本文基于經(jīng)典的載波相位雙差觀測方程,針對基于單頻接收機的GPS相對定位應用,提出一種可用于動態(tài)場合的相對定位初始化算法,該算法通過整周模糊度向量的動態(tài)調(diào)整,能夠有效地處理衛(wèi)星的頻繁起落,同時充分利用了過去觀測和當前觀測在模糊度分量上的相關(guān)性,增加了整周模糊度解算的成功率,縮短了初始化時間,實際動態(tài)試驗驗證了算法的有效性,同時算法的計算量較小且可遞歸實現(xiàn),對于相對定位系統(tǒng)的工程實現(xiàn)和提高實際應用的實時性具有重要意義。
1 基本數(shù)學模型
對于任意短基線,假定第k個歷元的衛(wèi)星可見數(shù)mk大于4顆,且實現(xiàn)接收機到衛(wèi)星LOS矢量的計算,則其雙差載波/碼聯(lián)合觀測方程可以統(tǒng)一成如下形式的標準數(shù)學模型[6]:
yk=Akak+Bkbk+vk,vk~N(0,Qyk)
ak∈Zmk-1,bk∈R3
(1)
其中,y表示雙差載波和雙差碼的聯(lián)合觀測矢量,維度為2mk-2;a為整周模糊度矢量,維度為mk-1;b為當?shù)氐乩碜鴺讼迪碌幕€矢量,包含東北天3個分量;A和B分別為a和b的系數(shù)矩陣,維度分別為(2mk-2)×(mk-1)和(2mk-2)×3;v為y的觀測噪聲矢量,Qy為其方差協(xié)方差矩陣。下標k表示所有觀測向量和矩陣均屬于第k個歷元。由于觀測量y通過雙差方法得到,故各分量存在較強的互相關(guān)性,即Qy為非對角陣,為了實現(xiàn)觀測量的去相關(guān),對Qy采用Cholesky分解,即
Qyk=Lk(Lk)T
(2)
構(gòu)造矩陣Xk=(Lk)-1,式(1)兩邊同時乘以Xk,則得到
Xkyk=XkAkak+XkBkbk+Xkvk
(3)
采用如下新的標記
(4)
則式(3)可以表示為
(5)
(6)
其中,Qk為正交矩陣,其維度為(2mk-2);Rk為上三角陣,其維度為3。令
(7)
令式(7)作用于式(5)的兩邊可得
(8)
即原來的方程可以分裂成2個部分;一個與基線坐標和雙差模糊度都有關(guān),即
(9)
另一個只與雙差整周模糊度有關(guān),即
(10)
由于正交變換不改變觀測噪聲的統(tǒng)計特性,所以仍然有
(11)
(12)
其中,Sk是m-1階上三角陣。令
(13)
(14)

(15)
正交變換不改變噪聲的統(tǒng)計特性,則
(16)
式(15)中,ak為整數(shù)向量,首先求得k歷元整周模糊度的浮點估計值
(17)

(18)
(19)
求得整周模糊度,代入式(9)求得基線向量b。一般而言,為了提高整周模糊度解算的成功率,通常采用多個歷元的觀測進行聯(lián)合估計,然而,在動態(tài)環(huán)境中,常出現(xiàn)某時刻衛(wèi)星信號由于失鎖和遮擋對于接收機“不可見”,而當脫離遮擋環(huán)境時,失鎖的衛(wèi)星又會重新出現(xiàn),按照傳統(tǒng)的僅用前后歷元共視星觀測進行計算測量,會使初始化過程過長,或者成功率持續(xù)維持在一個較低的水平。事實上,失去鎖定的衛(wèi)星,其在失鎖之前的觀測方程和現(xiàn)在仍然在跟蹤的衛(wèi)星之間依然存在部分模糊度的關(guān)聯(lián),如果能有效地利用歷史觀測信息,必然能增加整周模糊度解算的信息量,從而縮短初始化時間。采用同樣的方法,可以在k+1歷元得到和式(10)類似的表達式
(20)
假定在k+1歷元參考星仍然保持連續(xù)跟蹤,相比k歷元的觀測,部分非參考星在k+1歷元仍然被連續(xù)跟蹤,并且有新的衛(wèi)星被跟蹤,則ak+1的各個分量可以重新調(diào)整為
(21)
為了實現(xiàn)模糊度分量的次序調(diào)整,構(gòu)造如下置換矩陣
(22)

(23)
利用上式進行等價替換可得
(24)
將式(24)代入式(20)可得
(25)
為了實現(xiàn)k歷元和k+1歷元的聯(lián)合估計,構(gòu)造另外一組置換矩陣Πk+1
(26)
使得
(27)

(28)
將式(28)代入式(15)可得
(29)
(30)
再次構(gòu)造正交矩陣Pk+1,使得
(31)

(32)

(33)
(34)
令上部Ck+1與Sk+1的維數(shù)相同,則可進一步提取式(32)的上部得到
(35)
其中
(36)
注意到式(35)依然是上三角系統(tǒng),并且與k歷元的遞歸結(jié)果具有同樣的形式,故可以采用相同的計算方法獲得k+1歷元對整周模糊度及其方差協(xié)方差矩陣的估計,分別如下:
(37)
(38)
上述過程中假設(shè)參考星不發(fā)生失鎖,對于參考星變換,可以采用置換矩陣對式(35)進行等價變換[8]。
2 性能分析
整周模糊度解算的成功率通常用模糊度精度因子來計算,即ADOP(Ambiguity Dilution of Precision)來衡量,其計算方法如下[9]
(39)
成功率計算公式如下:
(40)
其中,n為模糊度的維數(shù),并且累計正態(tài)分布函數(shù)如下:
(41)
≡[Hhis|Hcur]
(42)

(43)

因此,本文選定PG成功率高于99%時進行估計,一旦次優(yōu)模糊度和最優(yōu)模糊度的Ratio檢驗值超過2,則認為整周模糊度固定成功,否則利用模糊度的浮點解估計基線向量,繼續(xù)利用遞歸過程完成初始化。
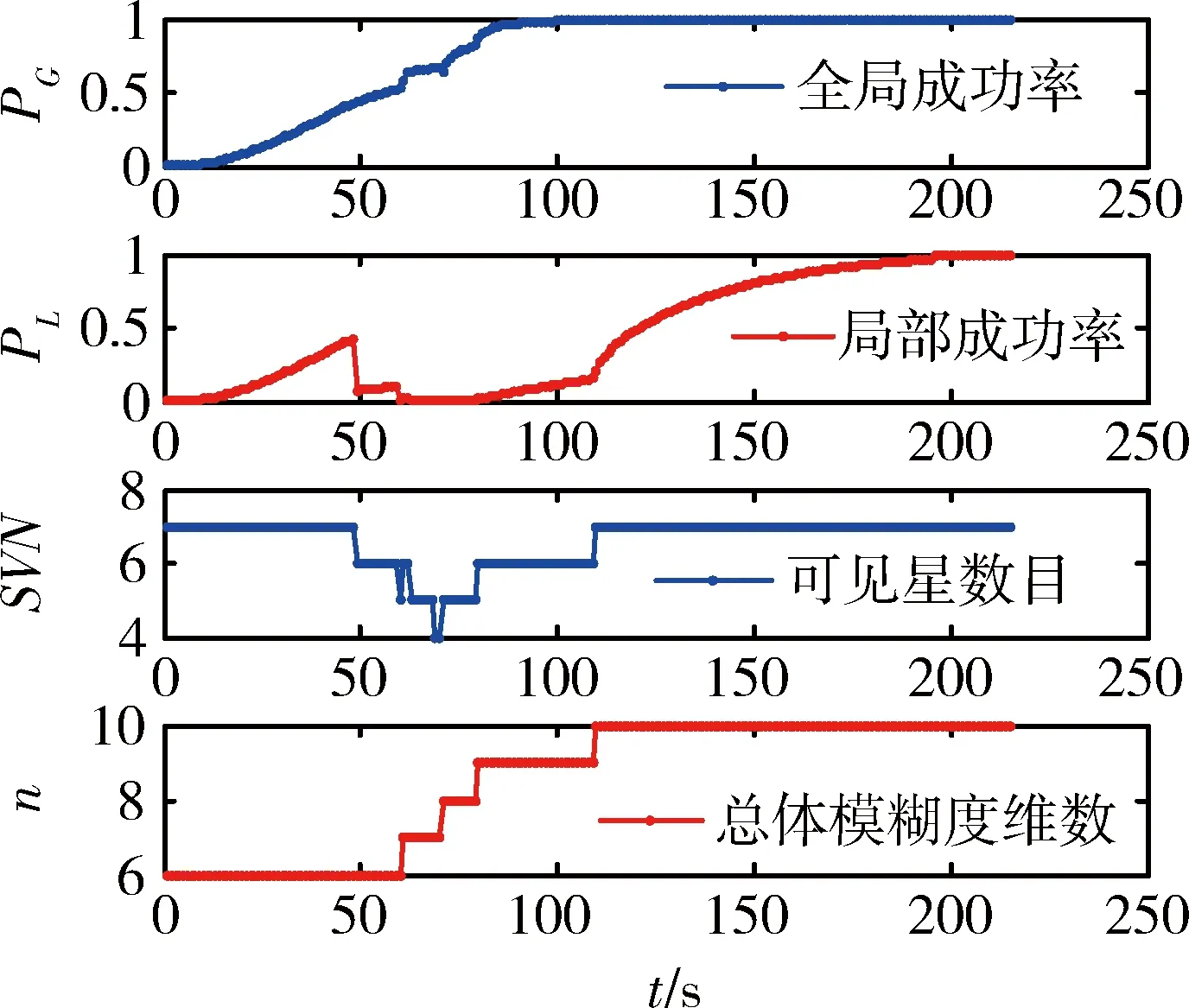
圖1 全局/局部整周模糊度估計成功率對比
3 實際數(shù)據(jù)測試
為了進一步驗證新算法在實際環(huán)境應用中的性能,在城市環(huán)境中進行動態(tài)相對定位。基準站和流動站的接收機采用JAVAD公司的Alpha2型單頻GPS接收機,如圖2所示。

圖2 美國JAVAD公司Alpha2型GPS接收機
天線采用Trimble公司研制的Trimble?ZephyrTM2型天線,如圖3所示,該天線可以全面支持GNSS,不僅可以最大限度地減輕多路徑效應,而且可以提供可靠的低仰角跟蹤能力,相位中心精度達到亞毫米級。

圖3 Trimble? ZephyrTM2型天線
實際測試環(huán)境為城市環(huán)境,基準站固定在馬路路口,流動站安裝在一臺遙控小車上,小車沿著一條主干馬路向北行駛約200m,速度為0.6m/s。由于馬路兩旁有較多樹木和建筑,遮擋頻繁出現(xiàn),初始化過程在小車運動過程中完成。如圖4所示,初始時刻衛(wèi)星可見數(shù)為7顆,運動期間參考星不發(fā)生變換,非參考星的數(shù)目在觀測期間跌至5顆,在初始化完成之前(垂直線左側(cè)),局部成功率對衛(wèi)星數(shù)目變化很敏感,而全局成功率則穩(wěn)健上升,總體模糊度維數(shù)同時也持續(xù)上升,為了避免計算量過大,一旦其維數(shù)超過15,則去掉1個歷史觀測的模糊度,總體維數(shù)降1維。圖5給出了此次試驗基線的解算結(jié)果,可以看出,運動所帶來的衛(wèi)星變化并沒有影響到初始化過程的完成,僅在1min左右的時間內(nèi),完成了整周模糊度的固定,得到了基線的精確解。
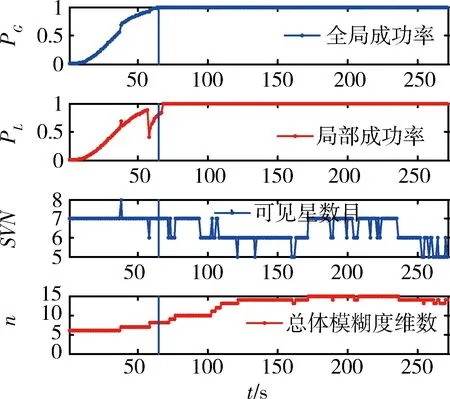
圖4 成功率與衛(wèi)星數(shù)目的變化
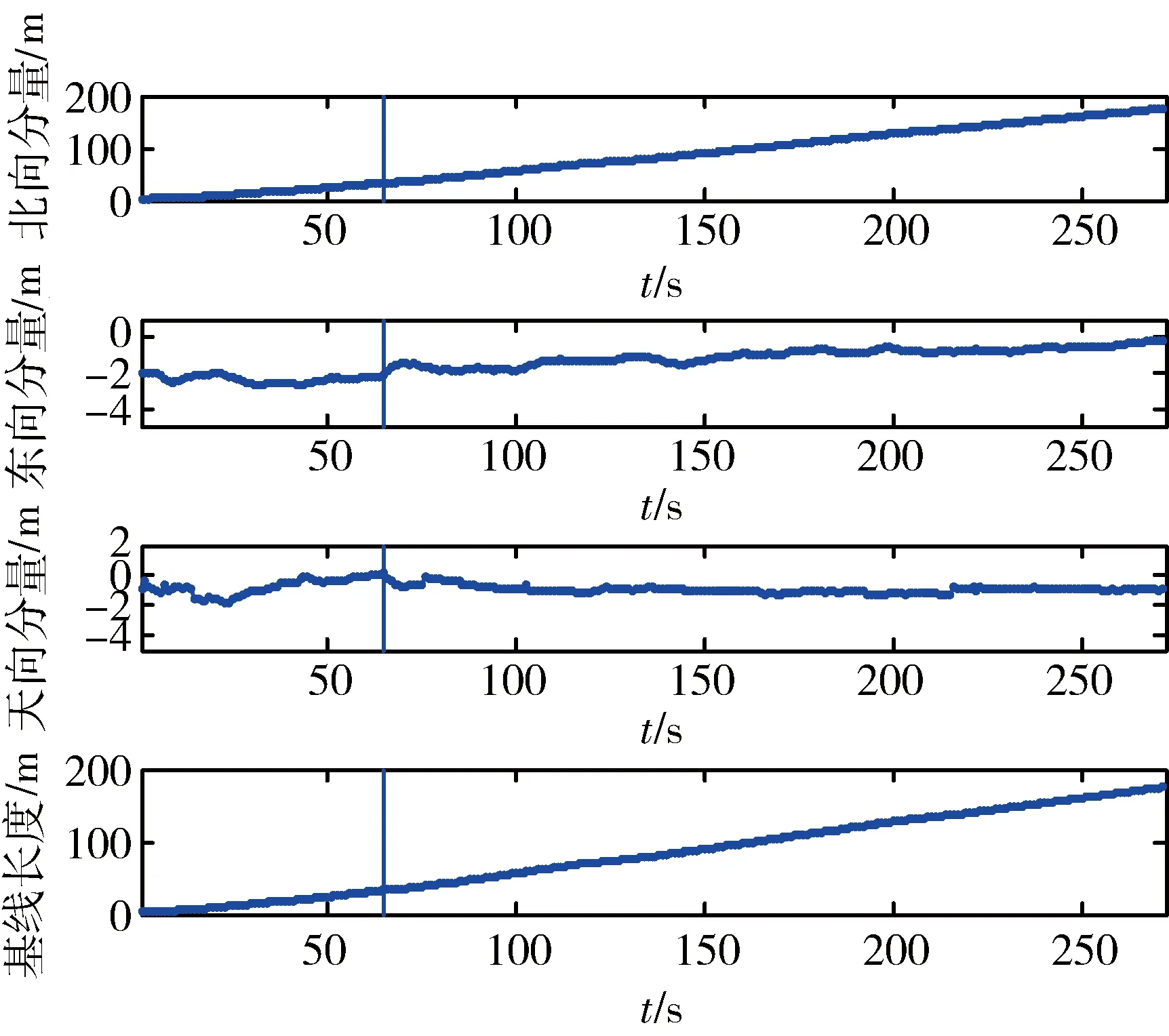
圖5 基線解算結(jié)果
4 結(jié)論
基于GPS單頻雙差載波相位觀測方程,提出一種整周模糊度浮點解遞歸估計方法,能在載體運動過程中完成動態(tài)初始化。算法可應用于衛(wèi)星頻繁的起落環(huán)境中,能在換星過程中保持解算的連續(xù)性;充分利用歷史觀測與當前觀測方程中部分模糊度分量的關(guān)聯(lián)性,縮短初始化時間,解算成功率逐步提高且對衛(wèi)星起落頻率不敏感;算法遞歸實現(xiàn),計算量小,對于實時動態(tài)相對定位有重要意義。
[1] Chen P, Shu L, Ding R, et al. Kinematic single-frequency relative positioning for LEO formation flying mission [J]. GPS Solutions, 2015,19(3):525-535.
[2] Buist P J, Teunissen P J G, Giorgi G, Verhagen S. Multivariate bootstrapped relative positioning of spacecraft using GPS L1/Galileo E1 signals [J]. Advances in Space Research, 2010, 47(5):770-785.
[3] Teunissen P J G. GNSS ambiguity resolution [J]. Journal of Geodesy, 2004, 78(1):235-244.
[4] Teunissen P J G. The LAMBDA method for the GNSS compass [J]. Artifical Satellite, 2007, 41(3):89-103.
[5] Montenbruck O, Wermuth M, Kahle R. GPS based relative navigation for the TanDEM-X mission—first flight results [J]. Navig J Ins, 2011, 58(4):293-304.
[6] Mohiuddin S, Psiaki M L. High-altitude satellite relative navigation using carrier-phase differential global positioning system techniques [J]. J Guidance Control Dynamic, 2007, 30(5):1427-1436.
[7] Chang X W, Paige C C. An orthogonal transformation algorithm for GPS positioning [J]. SIAM J Sci, Comp 2003, 24(5):1710-1732.
[8] Chang X W, Paige C C, Yin L. Code and carrier phase based short baseline GPS positioning: Computational aspects [J]. GPS Solutions, 2004, 7(4): 230-240, 2004.
[9] Chen W, Li X. Success rate improvement of single epoch integer least-squares estimator for the GNSS attitude/short baseline applications with common clock scheme [J]. Acta Geodaetica et Geophysica, 2014, 49(3): 295-312.
《航天控制》雜志
□歡迎訂閱 □歡迎刊登廣告 □歡迎投稿
開本:大16開 雙月刊 頁碼:96頁 定價:20.00元(全年120元)
國內(nèi)郵發(fā)代號:80-338 國外發(fā)行代號:BM4668
國內(nèi)統(tǒng)一連續(xù)出版物號:CN11-1989/V 國際標準連續(xù)出版物號: ISSN 1006-3242
編輯部地址:北京142信箱402分箱 郵政編碼:100854
電話:(010) 68762264、68388585 E-mail: htkz2013@163.com
網(wǎng)址:http://htkz.cn
The New Method for Dynamic Initialization of GPS Single Frequency Relative Positioning
Chen Wantong1, Li Xiaoqiang2
1. School of Electronics and Information Engineering, Civil Aviation University of China, Tianjin 300300, China 2. School of Electronics and Information Engineering, Beihang University, Beijing 100191, China
RegardingtheinitializationofGPSrelativepositioning,thebaselineisusuallyrequiredtobeinastaticstateandassumedthatthesamevisiblesatellitescanbeobservedduringtheobservation.Thus,itisnotapplicableforthehighdynamicvehicleswithinocclusionenvironment.Accordingtodealwiththisproblem,anewmethodfordynamicinitializationispresentedinthispaper,whichcanhandlethefrequentsatellitesettingandrisingandshorteninitializationtimebyutilizingtheambiguityrelevanceofpastobservationandcurrentobservation.Theactualdynamictestshowsthatthemethodcanbeusedtocompletetheinitializationoftheambiguityresolutionintheshorttimeandthesuccessrateoftheintegerambiguityestimationisnotsensitivetothenumberofsatellitesettingandrising.
GPS;Relativepositioning;Integerambiguity;Shortbaseline;Floatresolution
*國家自然科學基金項目(61401468);中國民航大學科研啟動基金(2013QD27X);中央高校基本科研業(yè)務項目(3122014D004)
2015-10-08
陳萬通(1986-),男,河北承德人,博士,講師,主要研究方向為衛(wèi)星導航與相對定位;李小強(1986-),男,山西呂梁人,碩士,高級工程師,主要研究方向為衛(wèi)星導航RTK技術(shù)。
V249.3
A
1006-3242(2016)02-0044-05
