近地零動量衛(wèi)星干擾力矩飛輪補償控制
2016-08-09 18:54:16王獻忠張麗敏
航天控制 2016年2期
王獻忠 張 肖 張麗敏
1.上海航天控制技術(shù)研究所,上海200233 2.空間智能控制技術(shù)重點實驗室,上海200233
?
近地零動量衛(wèi)星干擾力矩飛輪補償控制
王獻忠 張 肖 張麗敏
1.上海航天控制技術(shù)研究所,上海200233 2.空間智能控制技術(shù)重點實驗室,上海200233

對于配置單翼太陽帆板的近地衛(wèi)星,氣動干擾力矩嚴重影響近地衛(wèi)星姿態(tài)控制。首先進行對日定向時氣動干擾力矩分析;接著針對氣動干擾力矩設(shè)計飛輪補償控制算法,并采取弱偏置措施防止飛輪過零干擾;最后通過仿真驗證了干擾力矩補償控制算法的有效性,并可大幅減小磁力矩器磁矩。 關(guān)鍵詞 衛(wèi)星;姿態(tài)控制;零動量控制;飛輪;磁力矩器
近地空間稀薄大氣不僅會影響衛(wèi)星軌道,還會對衛(wèi)星姿態(tài)控制產(chǎn)生較大的氣動干擾力矩,特別是安裝單翼太陽帆板進行二維對日定向控制的近地衛(wèi)星,如軌道高度200~300km的衛(wèi)星,氣動干擾力矩幅值可達100g·cm。
磁力矩器只能進行二軸姿態(tài)控制,全磁控制一般用于星體角速率阻尼[1],衛(wèi)星穩(wěn)態(tài)運行時一般采用飛輪加磁控制[2]。不需要快速姿態(tài)機動的衛(wèi)星一般采用偏置動量控制,偏置動量衛(wèi)星磁力矩器用于動量輪卸載和章進動控制[3-5];目前較多衛(wèi)星采用零動量控制,零動量衛(wèi)星磁力矩器一般用于對飛輪角動量卸載[2,6],國內(nèi)外學(xué)者也對磁和飛輪聯(lián)合控制進行了研究[7-10],磁和飛輪聯(lián)合控制時磁力矩器除了對飛輪卸載,還直接用于星體姿態(tài)控制。
氣動力與衛(wèi)星相對大氣的飛行速度方向相反,產(chǎn)生的氣動干擾力矩與衛(wèi)星的飛行速度方向正交,一般作用在衛(wèi)星的Z軸。考慮到太陽矢量基本在衛(wèi)星赤道面附近,近地衛(wèi)星對日定向時氣動干擾力矩峰值一般出現(xiàn)在高緯度區(qū),此區(qū)域Z軸磁場強度最強,X和Y軸磁場強度較弱,根據(jù)磁矩的叉乘特性Tm=M×B,Z軸姿態(tài)處于磁不可控區(qū),氣動干擾力矩主要由飛輪轉(zhuǎn)速控制。
近地衛(wèi)星氣動干擾力矩嚴重,直接基于零動量加磁卸載控制,要求配置較大磁矩輸出的磁力矩器,導(dǎo)致磁力矩器的重量大幅增加。本文首先分析近地衛(wèi)星對日定向時的氣動干擾力矩;接著針對氣動干擾力矩研究了飛輪補償控制算法和防止飛輪過零干擾;最后仿真驗證了干擾力矩補償控制算法的有效性。
1 動力學(xué)方程及磁卸載
1.1 剛體動力學(xué)方程
衛(wèi)星剛體動力學(xué)模型[11-12]如下:
(1)
其中,I是衛(wèi)星本體的轉(zhuǎn)動慣量,ω為衛(wèi)星本體坐標系相對慣性空間的角速率,H為飛輪角動量,Tc為姿控力矩,Td為干擾力矩。
1.2 飛輪磁卸載
飛輪角動量磁卸載如下:
Mc=-k·(Bb×Δh)
(2)
其中:Δh為需要卸載的飛輪角動量,k為磁卸載系數(shù),Bb為衛(wèi)星本體下三軸磁場強度,Bb=[BxByBz]T,Bx,By,Bz為磁場強度三軸分量。
2 對日定向時氣動干擾力矩分析
2.1 太陽矢量計算
太陽在慣性系和軌道系下指向如圖1所示。
太陽矢量在慣性系下坐標:
(3)
其中:αs為太陽赤經(jīng),βs為太陽赤緯。
將rsi轉(zhuǎn)換至軌道坐標系下:
(4)
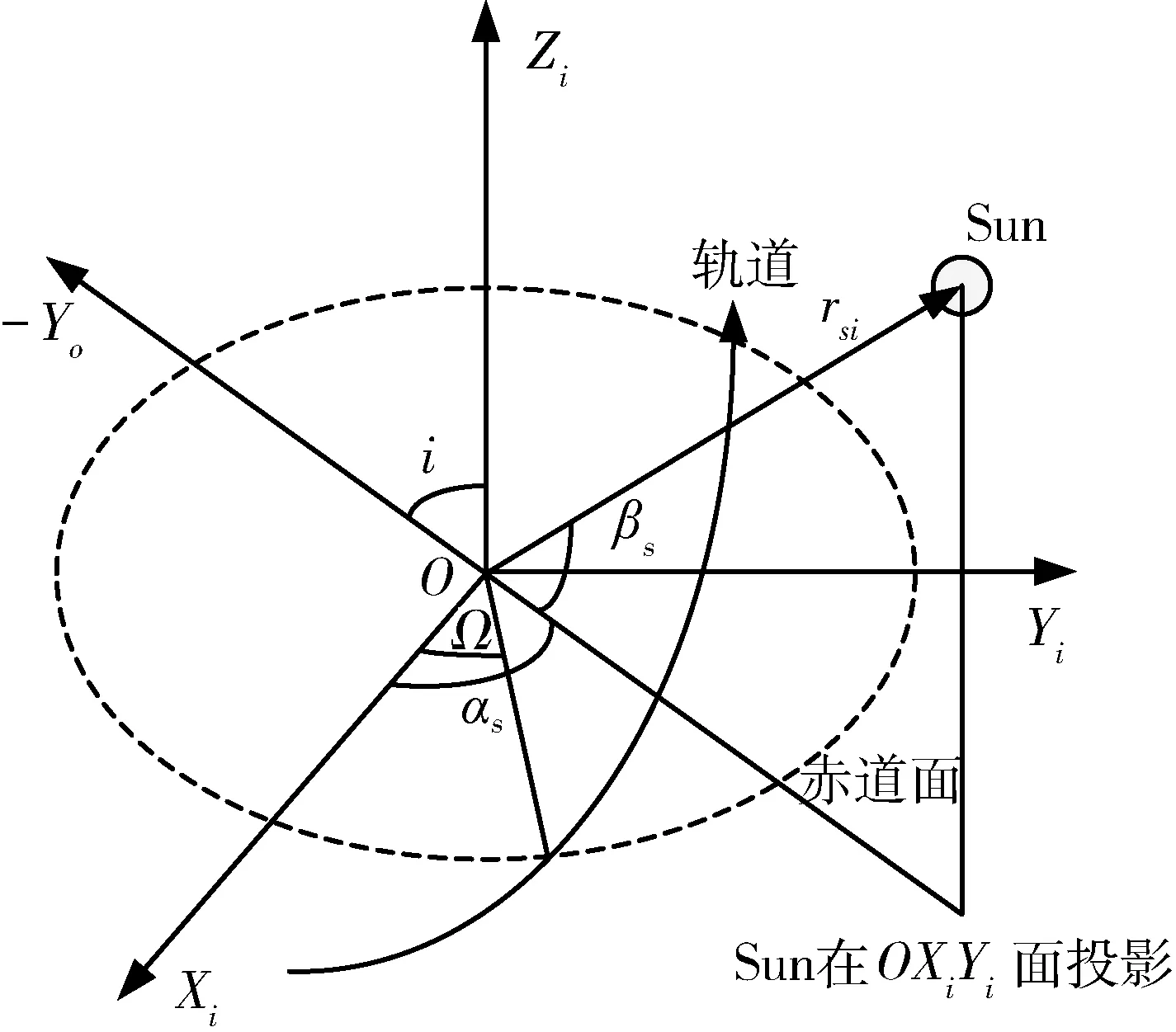
圖1 太陽在慣性系和軌道系下指向
其中:Aoi為慣性系至軌道系的轉(zhuǎn)換矩陣,i,u,Ω分別為衛(wèi)星的軌道傾角、緯度輻角和升交點赤經(jīng)。
2.2 二維對日定向時帆板法線方向
帆板在星體上安裝方式及零位位置如圖2所示,帆板可以繞偏置軸最大正負70°偏置,可以繞旋轉(zhuǎn)軸正負360°旋轉(zhuǎn)。

圖2 帆板在星體上安裝方式及零位位置
二維對日定向時帆板先繞Yb軸旋轉(zhuǎn),使太陽矢量位于OsYsZs平面內(nèi),再繞偏置軸偏置一定的角度,使帆板法線指向太陽。
不考慮衛(wèi)星對地定向時星體姿態(tài)偏差(下同),衛(wèi)星在軌時相對慣性空間按一定的軌道角速率繞軌道面法向(負Yo軸)旋轉(zhuǎn),太陽相對慣性空間靜止,帆板需要繞軌道面負法向(Yo軸)旋轉(zhuǎn)才能保持帆板對日定向。
升交點處帆板二維對日定向先繞Yb軸旋轉(zhuǎn)角度u0,再繞Xb軸偏置角度β實現(xiàn)對日定向;衛(wèi)星按軌道角速率ω0旋轉(zhuǎn),飛行到緯度幅角u處,帆板繞Yb軸旋轉(zhuǎn)角度為u0+u,再繞Xb軸偏置角度β實現(xiàn)對日定向,帆板法線在軌道坐標系下坐標:
(5)
其中:

Ano為軌道系至帆板系的轉(zhuǎn)換矩陣,rn0為帆板零位狀態(tài)下帆板法線指向。
對日定向狀態(tài)下帆板法線指向太陽,得:
rno=rso
(6)
由式(6)可得:
(7)
(8)
對于傾角為42°的近地軌道,考慮太陽南北回歸23.5°影響,帆板最大偏置角度約為65.5°,一般要求帆板具備70°的偏置能力。
2.3 氣動干擾力矩分析
氣動干擾力和氣動干擾力矩如下:
(9)
Tda=La×Fp
(10)
其中:cd為氣動阻力系數(shù) ,取值在2.2~2.4之間,ρ為衛(wèi)星所在高度的大氣密度,v為飛行器相對大氣的速度,A為帆板受氣動影響的等效面積,La為迎風(fēng)面壓力中心相對飛行器質(zhì)心的距離。
氣動干擾力矩作用在星體的Z軸,設(shè)帆板面積為s,帆板二維對日定向時等效氣動面積如下:
(11)
由式(11)得Z軸氣動干擾力矩如下:
(12)
其中:Tdaz0為氣動干擾力矩幅值,單翼安裝在相對飛行方向的左側(cè)Tdaz0<0,反之右側(cè)Tdaz0>0。
近地衛(wèi)星單翼帆板氣動干擾力矩較嚴重,采用雙翼對稱安裝帆板,氣動干擾力矩可以相互抵消。
3 干擾力矩控制
3.1 飛輪補償控制
由式(12)可知,氣動干擾力矩具有正弦絕對值波形,波動周期為軌道周期。當u+u0=90°,或u+u0=270°時氣動干擾力矩最大。
考慮到太陽矢量基本在衛(wèi)星赤道面附近,近地衛(wèi)星對日定向時氣動干擾力矩峰值一般出現(xiàn)在高緯度區(qū),此區(qū)域Z軸磁場強度最強,X軸和Y軸磁場強度較弱,根據(jù)磁矩的叉乘特性Tm=M×B,Z軸姿態(tài)處于磁不可控區(qū),氣動干擾力矩主要由飛輪轉(zhuǎn)速控制。
u0=0氣動干擾力矩如圖3所示,氣動干擾力矩最大時磁控最弱,以下氣動干擾力矩控制考慮u0=0的情況。
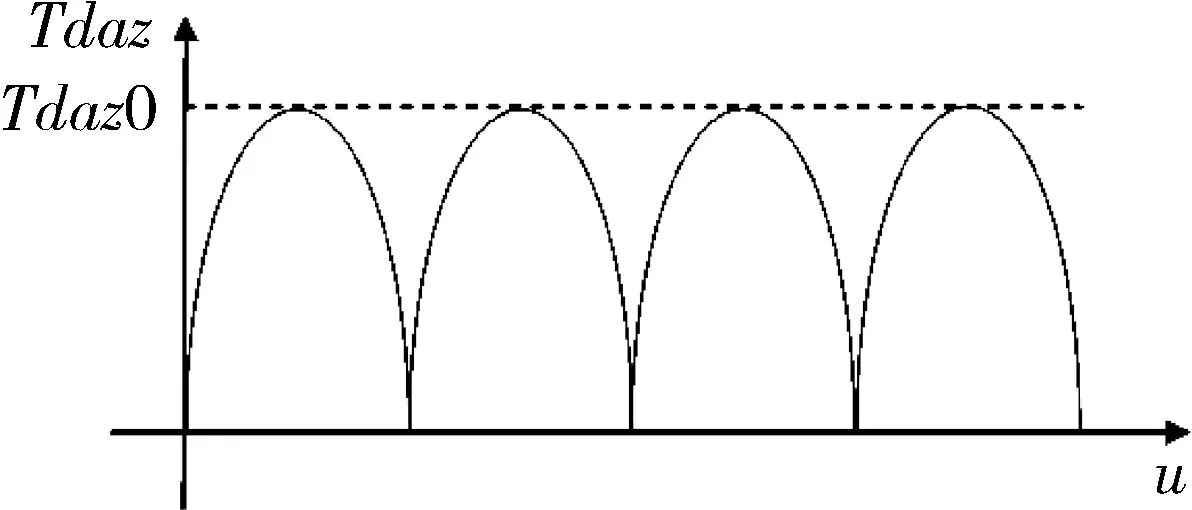
圖3 氣動干擾力矩曲線
近地衛(wèi)星氣動干擾力矩嚴重,直接基于零動量加磁卸載控制要求配置較大磁矩輸出的磁力矩器,導(dǎo)致磁力矩器的重量大幅增加。
基于X軸飛輪偏置角動量與軌道角速率叉乘產(chǎn)生的陀螺力矩控制氣動干擾,飛輪補償控制力矩如下:
Tzb=-Hx·ω0
(13)
補償角動量與根據(jù)滾動姿態(tài)角計算的飛輪控制量合成后控制X軸飛輪,磁力矩器不對X軸飛輪補償角動量卸載。
X軸飛輪偏置角動量用于磁不可控區(qū)干擾力矩補償,為避免X軸飛角動量變化對X軸干擾,磁可控區(qū)X軸飛輪角動量保持不變,針對氣動干擾力矩設(shè)計飛輪補償角動量如圖4所示。

圖4 補償氣動干擾力矩X軸飛輪角動量偏置曲線
由式(12)和(13)可得X軸飛輪角動量補償最大值如下:
(14)
其中:Tdaz0為氣動干擾力矩最大值。
Z軸干擾力矩磁不可控區(qū)出現(xiàn)在南北極附近的較小區(qū)域內(nèi),磁可控區(qū)X軸飛輪角動量保持值產(chǎn)生的補償力矩幅值大于氣動干擾力矩平均值。由式(12)得到氣動干擾力矩均值如下:
(15)
由式(15)得X軸飛輪角動量保持值要求如下:
(16)
針對氣動干擾力矩的飛輪角動量補償策略也可以應(yīng)用于受地球陰影遮擋的太陽光壓干擾力矩補償,受地球陰影遮擋的太陽光壓干擾力矩如圖5所示,相應(yīng)X軸飛輪角動量偏置曲線如圖6所示,X軸飛輪角動量保持值可以適當減小。
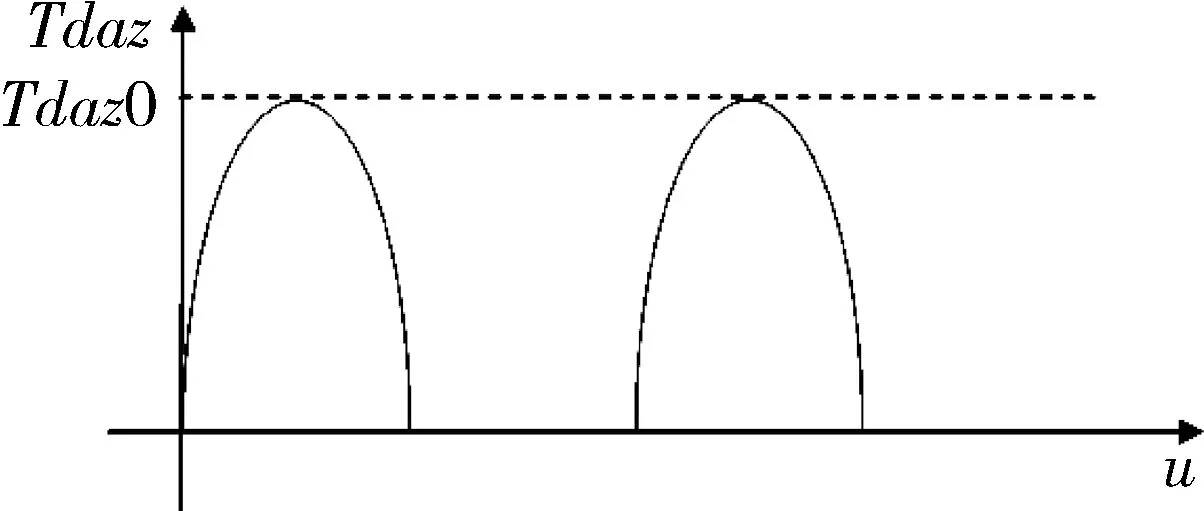
圖5 太陽光壓干擾力矩曲線
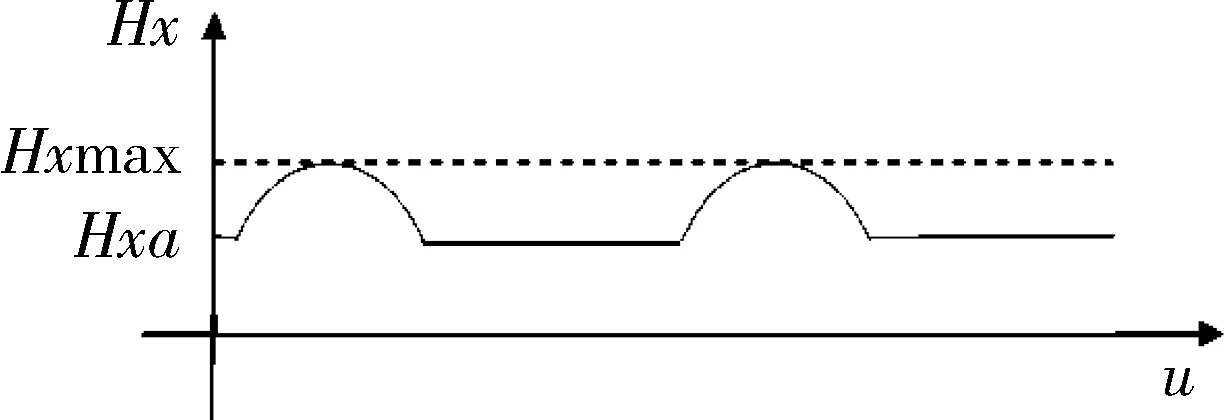
圖6 補償光壓干擾力矩X軸飛輪角動量偏置曲線
3.2 飛輪過零抑制
飛輪轉(zhuǎn)速過零時,動摩擦轉(zhuǎn)變?yōu)殪o摩擦,再由靜摩擦轉(zhuǎn)變?yōu)閯幽Σ粒艺崔D(zhuǎn)摩擦力矩極性相反,飛輪轉(zhuǎn)速過零會對星體姿態(tài)控制產(chǎn)生干擾,影響星體的穩(wěn)定度,特別是當飛輪在零轉(zhuǎn)速附近頻繁控制時,飛輪轉(zhuǎn)速頻繁過零還會影響飛輪壽命。
為了避免飛輪轉(zhuǎn)速過零,可以采用整星零動量方式,但整星零動量控制需要4臺飛輪同時工作,采用3臺飛輪避免轉(zhuǎn)速過零安裝方式如圖7所示。
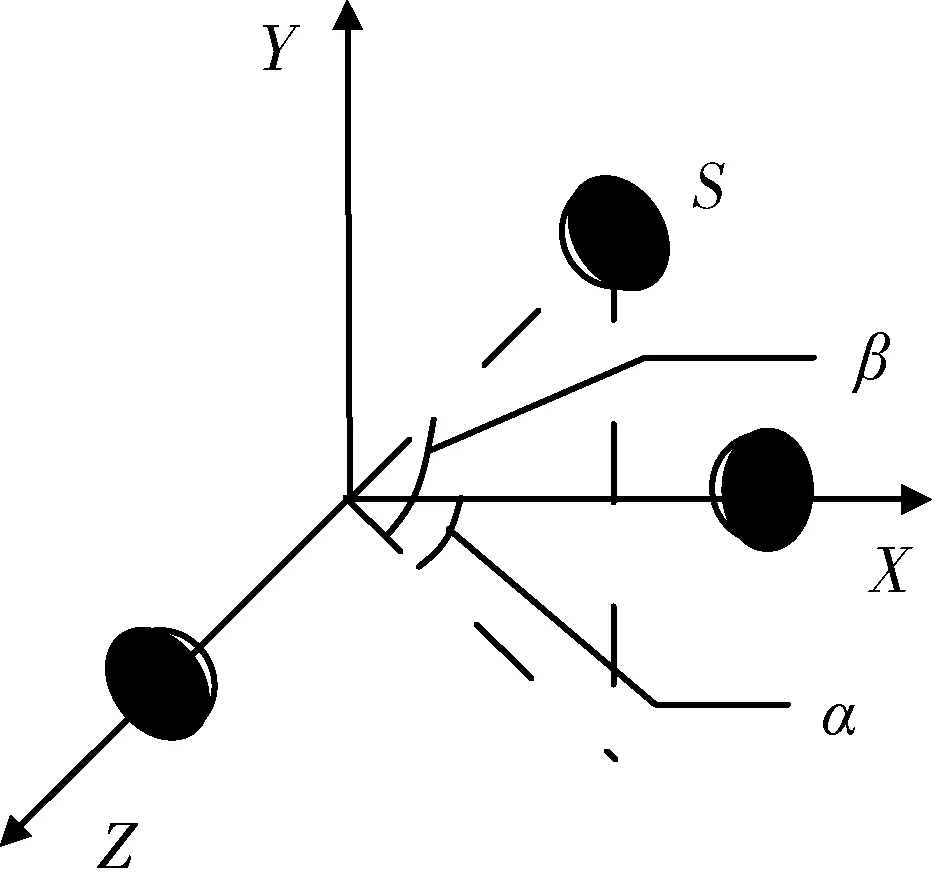
圖7 避免飛輪轉(zhuǎn)速過零安裝方式
類似雙自由度偏置動量控制,可以對俯仰軸角動量進行適當偏置Hb,根據(jù)斜裝飛輪安裝角得3臺飛輪工作時中心角動量如下:
Hs=Hb/sinβ
(17)
Hx=-cosα·cosβ·Hs
(18)
Hy=-sinα·cosβ·Hs
(19)
斜裝飛輪工作在弱偏置狀態(tài),可以避免轉(zhuǎn)速過零,其對X和Z軸的角動量分量可以避免X和Z軸飛輪轉(zhuǎn)速過零。
不考慮X軸飛輪對氣動干擾力矩補償,斜裝飛輪弱偏置極性使俯仰軸角動量Hb為負;X軸飛輪對氣動干擾力矩補償角動量較大時,要使斜裝飛輪在X軸的角動量與氣動干擾力矩補償角動量極性一致,降低X軸飛輪轉(zhuǎn)速;反之要極性相反,避免X軸飛輪過零。
4 仿真驗證
衛(wèi)星偏航軸加幅值為-100g·cm的正弦絕對值氣動干擾力矩,結(jié)合近地軌道角速率,理論計算X軸補償角動量約為-5.5N·m·s,反作用飛輪角動量為15N·m·s。
不考慮飛輪補償氣動干擾力矩磁力矩器輸出如圖8所示,穩(wěn)定時最大輸出磁矩約300A·m2。
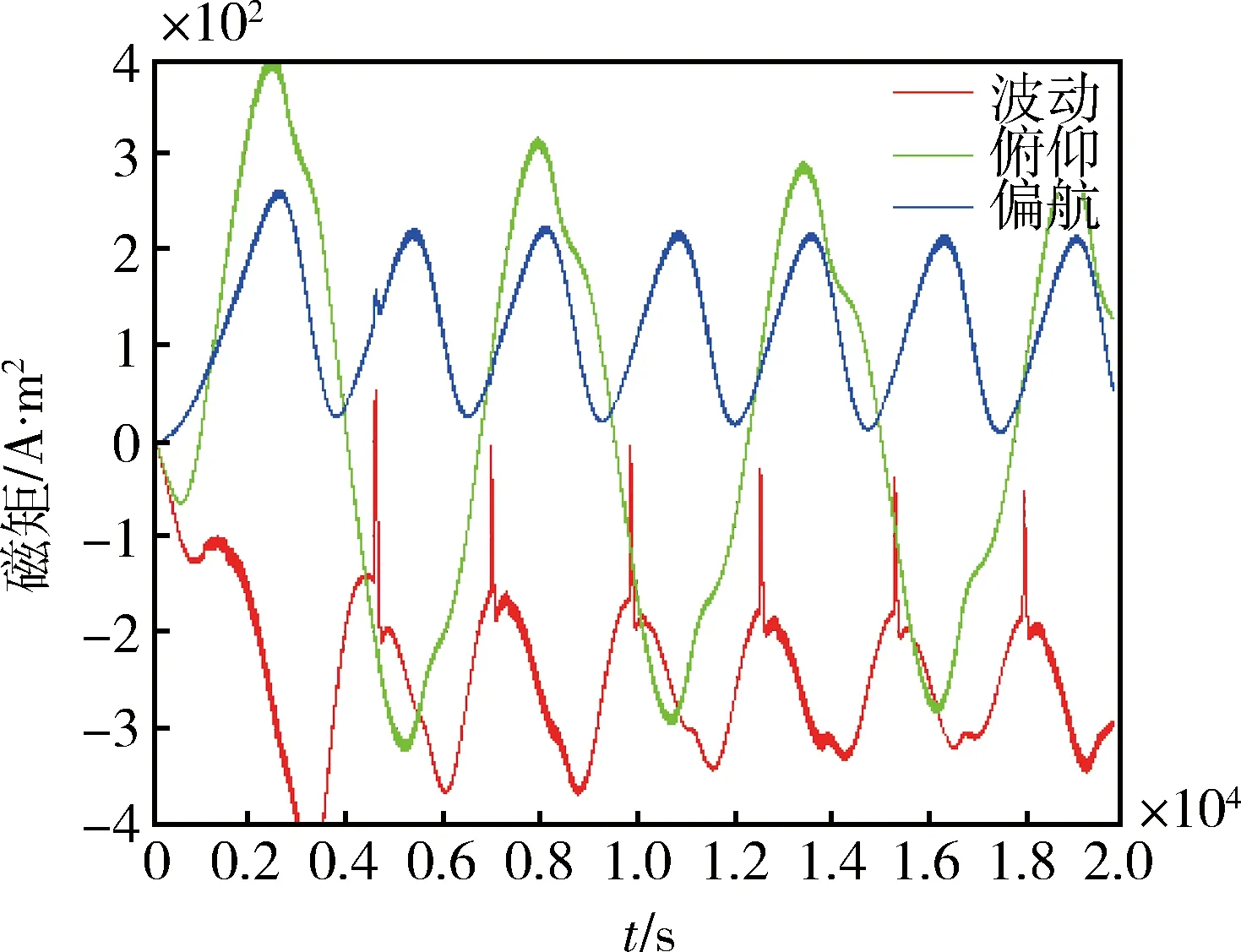
圖8 不考慮飛輪補償磁力矩器磁矩輸出曲線
采用飛輪補償氣動干擾力矩磁力矩器磁矩輸出如圖9所示,穩(wěn)定時最大輸出磁矩約50A·m2,且穩(wěn)態(tài)姿態(tài)控制精度也得到了提高。飛輪角動量輸出曲線如圖10所示,穩(wěn)定時Y和Z軸飛輪轉(zhuǎn)速會過零,可以通過Y軸弱偏置避免飛輪過零。
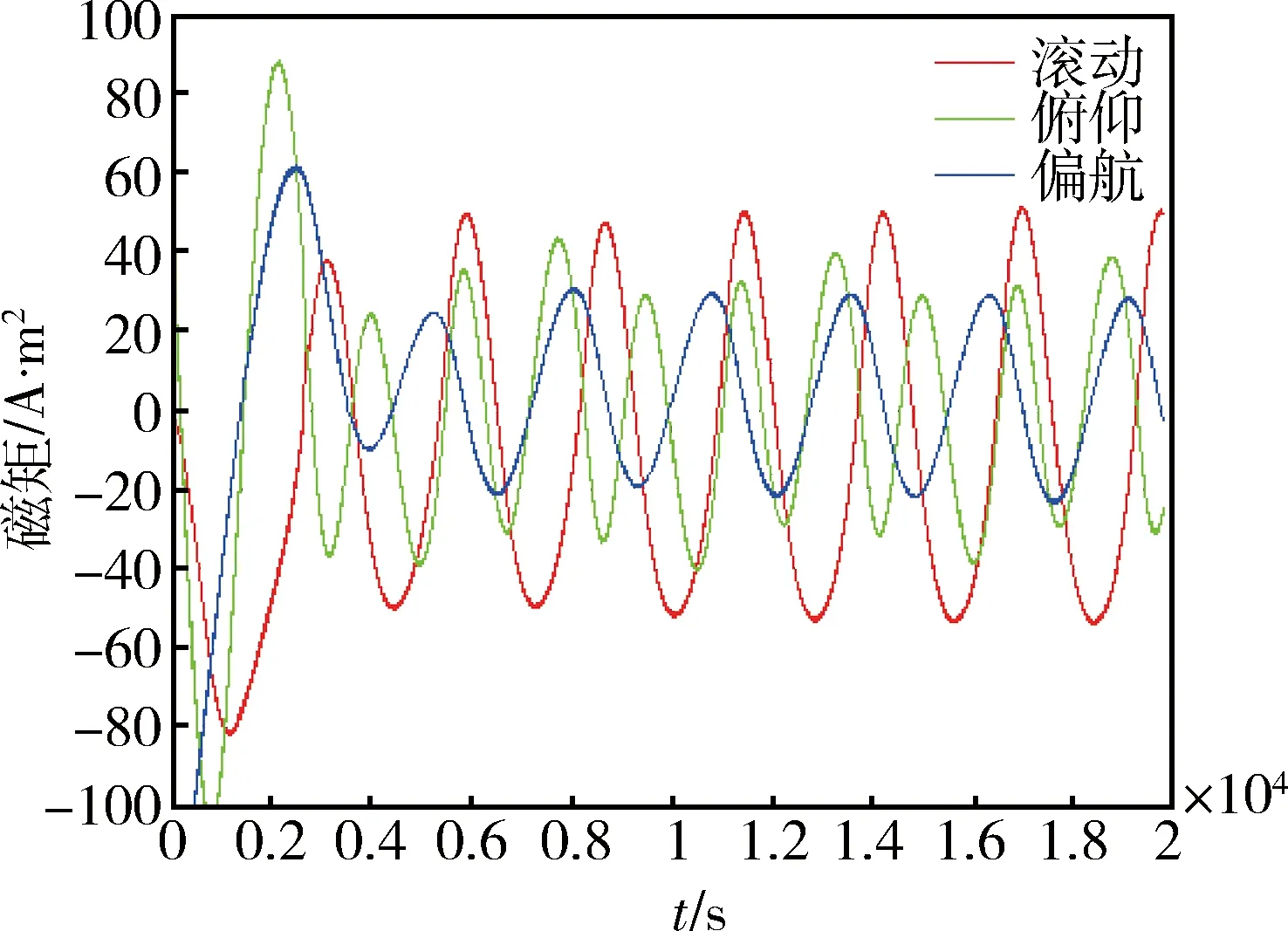
圖9 考慮飛輪補償磁力矩器磁矩輸出曲線
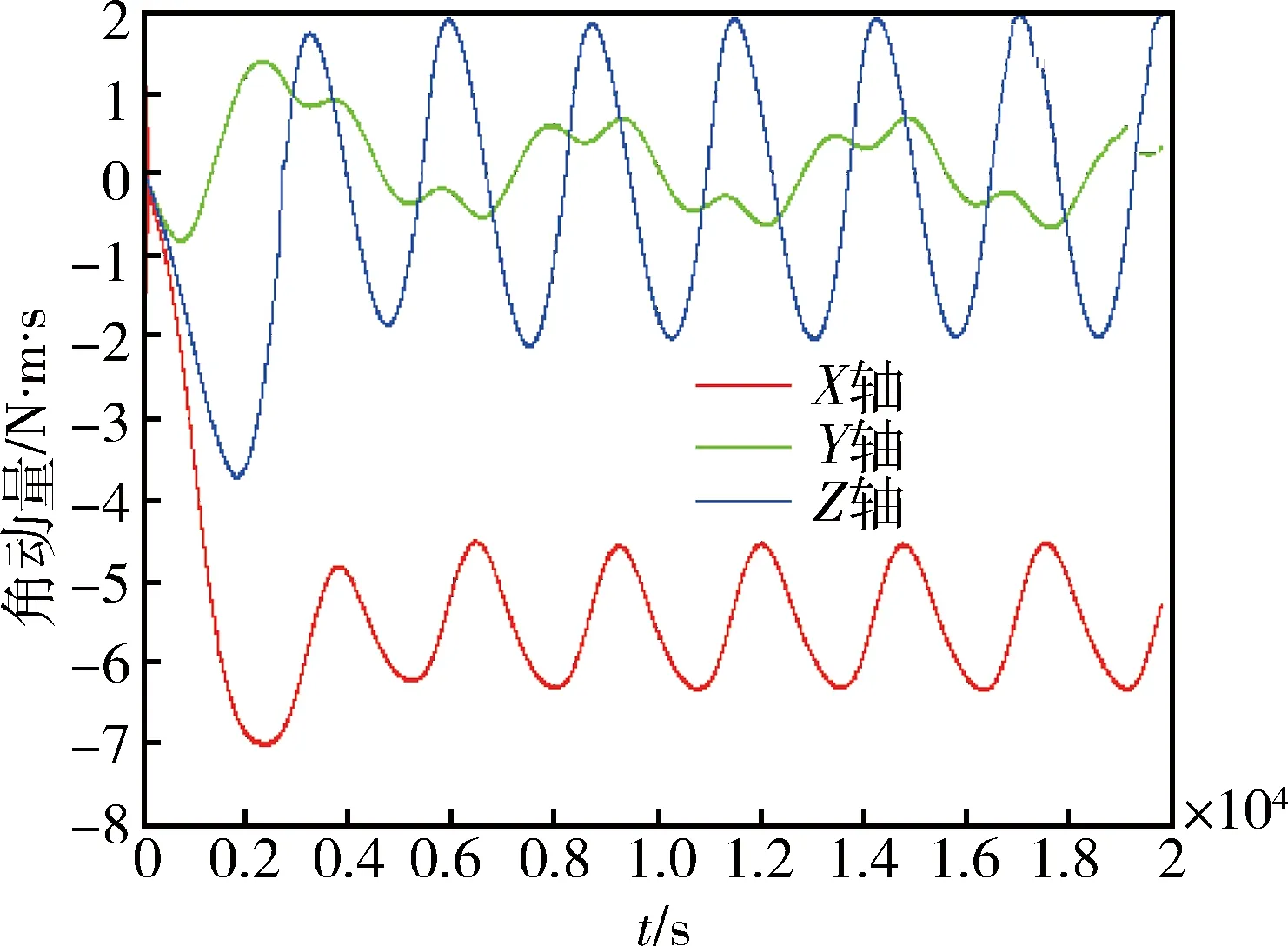
圖10 考慮飛輪補償飛輪角動量輸出曲線
5 結(jié)論
首先分析了近地衛(wèi)星對日定向時氣動干擾力矩;接著針對氣動干擾力矩設(shè)計飛輪補償控制算法,并采取弱偏置措施防止飛輪過零干擾;最后通過仿真驗證了干擾力矩補償控制算法的有效性,并可大幅減小磁力矩器磁矩,減輕衛(wèi)星重量。
[1] 陳宏宇.無陀螺磁控小衛(wèi)星的大角度姿態(tài)捕獲研究[J].航天控制,2006,24(3):43-47,53.(Chen Hongyu. Active Magnetic Attitude Control of Microsatellite Without Gyroscope[J].Aerospace Control, 2006,24(3):43-47,53.)
[2] 田春華,馬廣富,李傳江,等.三軸穩(wěn)定衛(wèi)星姿控系統(tǒng)的一般性問題[J].自動化技術(shù)與應(yīng)用,2001,20(1):9-12.(Tian Chunhua, Ma Guangfu, Li Chuanjiang, et al. General Problem of Three Axis Stabilized Satellite Attitude Control System[J]. Techniques of Automation and Applications, 2001,20(1):9-12.)
[3] 柯旗,王勇,魏春嶺.一種在軌改善偏置動量衛(wèi)星控制精度的方法[J].空間控制技術(shù)與應(yīng)用,2011,37(4):41-44.(Ke Qi, Wang Yong, Wei Chunling. A Way to Improve Attitude Control Accuracy for Momentum Biased Satellite[J].Aerospace Control and Application, 2011,37(4):41-44.)
[4] 黃衛(wèi)東,張育林. 重力梯度穩(wěn)定小衛(wèi)星的最優(yōu)主動磁控和動量輪控制[J].航天控制,2005,23(4):27-31.(Huang Weidong, Zhang Yulin. An Optimal Control Algorithm of a Gravity Gradient Stabilized Small Satellite with Momentum Wheel and Magnetic Torque[J]. Aerospace Control, 2005,23(4):27-31.)
[5] 李傳江,馬廣富,宋斌.基于滾動信息反饋的偏置動量衛(wèi)星滾動/偏航回路姿態(tài)控制器設(shè)計[J]. 航天控制,2006,24(3):29-34.(Li Chuanjiang, Ma Guangfu, Song Bin. Roll/Yaw Attitude Controller Design of Biased Momentum Satellite Based on Roll Information Feedback[J].Aerospace Control, 2006,24(3):29-34.)
[6] 李鵬奎,錢山,郭才發(fā),等.零動量輪衛(wèi)星姿態(tài)控制系統(tǒng)研究[J].中國空間科學(xué)技術(shù),2009,29(2):25-32.(Li Pengkui, Qian Shan, Guo Caifa ,et al. Research on Satellite Attitude Control Problems of Zero-momentum Reaction Wheel System[J]. Chinese Space Science and Technology, 2009,29(2):25-32.)
[7] 賈飛蕾,徐偉,李恒年,等.基于聯(lián)合飛輪和磁力矩器的航天器姿態(tài)控制算法研究[J].航天控制,2010,28(3):16-19.(Jia Feilei, Xu Wei, Li Hengnian, et al. The Study of Control Algorithm for Spacecraft Attitude Control Based on the Combination of Reaction Wheels and Magnetorque[J].Aerospace Control, 2010,28(3):16-19.)
[8] 陳閩,張世杰,張迎春.基于反作用飛輪和磁力矩器的小衛(wèi)星姿態(tài)聯(lián)合控制算法[J].吉林大學(xué)學(xué)報(工學(xué)版),2010,40(4):1155-1160.(Chen Min, Zhang Shijie, Zhang Yingchun. Combined Attitude Control Method of Small Satellite Using Reaction Wheels and Magnetorquers[J].Journal of Jilin University(Engineering and Technology Edition), 2010,40(4):1155-1160.)
[9] 段晨陽,湯國建,張世杰.單軸飛輪故障時的小衛(wèi)星姿態(tài)控制方法研究[J].航天控制,2007,25(3):48-52.(Duan Chenyang, Tang Guojian, Zhang Shijie. Attitude Control Method of Small Satellite in the Case of Single Reaction Wheel Failure[J]. Aerospace Control, 2007,25(3):48-52.)
[10] 陳閩,張世杰,邢艷軍,等.飛輪故障時的小衛(wèi)星輪控與磁控聯(lián)合控制方法[J].哈爾濱工業(yè)大學(xué)學(xué)報,2007,39(5):811~816.(Chen Min, Zhang Shijie, Xing Yanjun,et al. Combined Attitude Control Method of Small Satellite in the Case of Reaction Wheel Failed[J]. Journal of Harbin Institute of Technology, 2007,39(5):811-816.)
[11] 章仁為.衛(wèi)星軌道姿態(tài)動力學(xué)與控制[M].北京:北京航空航天大學(xué)出版社,2006.(Zhang Renwei. Attitude and Orbit Dynamics and Control of Satellite [M]. Bei Jing: Beihang University press, 2006.)
[12] 屠善澄.衛(wèi)星姿態(tài)動力學(xué)與控制[M].北京:宇航出版社,2002.(Tu Shancheng. Attitude Dynamics and Control of Satellite [M]. BeiJing: Space press, 2002.)
Disturbance Moment Control Based on Wheel for Zero-Momentum Near Earth Satellites
Wang Xianzhong, Zhang Xiao, Zhang Limin
1.Shanghai Aerospace Control Technology Institute, Shanghai 200233,China 2.Shanghai Key Laboratory of Aerospace Intelligent Control Technology, Shanghai 200233,China
Theattitudecontrolofnearearthsatelliteswithsinglesolarcellarrayisbadlydisturbedbytheatmospheredisturbancemonment.Firstly,theatmospheredisturbancemomentofnearearthsatellitesisanalyzedwhilethenormaldirectionofthesolarcellarraypointstosun.Then,thecontrolarithmeticisdesignedforcompensatingthedisturbancemomentofatmospherebasedonwheelandpreventingfromtherotatespeedcrossing-zerodisturbanceofthewheelwithlowbiasedmomentum.Finally,thesimulationresultvalidatesthearithmeticofthedisturbancemomentcontrolandshowsthatthemagneticmomentofthemagnetorquercanbelargelydecreased.
Satellite;Attitudecontrol;Zero-momentumcontrol;Wheel;Magnetorquer
2015-06-30
王獻忠(1971-),男,江蘇太倉人,博士,研究員,主要研究方向為航天器導(dǎo)航、制導(dǎo)與控制技術(shù);張 肖(1981-),女,浙江舟山人,碩士,高級工程師,主要研究方向為航天器控制技術(shù);張麗敏(1981-),女,河南新鄉(xiāng)人,碩士,工程師,主要研究方向為航天器導(dǎo)航與控制技術(shù)。
V448.2
A
1006-3242(2016)02-0060-06
