冗余陀螺測量單元的實驗室標定方法設計
2016-08-10 10:36:17梁海波呂章剛
航天控制 2016年1期
關鍵詞:卡爾曼濾波
梁海波 梁 婕 孟 恭 許 昊 呂章剛
1. 北京航天自動控制研究所,北京 100854 2. 宇航智能控制技術國家級重點實驗室,北京 100854
?
冗余陀螺測量單元的實驗室標定方法設計
梁海波1,2梁 婕1孟 恭1許 昊1呂章剛1
1. 北京航天自動控制研究所,北京 100854 2. 宇航智能控制技術國家級重點實驗室,北京 100854
提出了采用Kalman濾波對冗余陀螺的常值誤差、標度因數誤差和安裝誤差進行估計的實驗室標定方法。采用小角度旋轉向量法對安裝誤差進行建模,并設計了Kalman濾波器。在對濾波器的量測方程進行設計時,采用零空間擴增法來改善濾波器中各陀螺誤差狀態量的可觀測性。通過仿真試驗,表明該標定方法對所有誤差狀態量估計的平均相對誤差均低于1%,從而證明了該方法的有效性。 關鍵詞 標定;冗余陀螺;卡爾曼濾波;零空間擴增
陀螺作為飛行器控制系統的重要儀表,其可靠性的高低直接關系到飛行器任務完成的質量,在極端情況下陀螺的故障將導致飛行任務失敗。通常,可以通過陀螺冗余技術來提高其可靠性。目前,盡管三軸陀螺配置方式的標定技術已趨于成熟[1-4],但針對冗余配置的陀螺標定技術的研究卻較少。其原因在于,隨著冗余陀螺數量的增加,以及配置方式的日趨復雜,分離陀螺參數的難度也隨之增加,且不同配置方式所采用的標定方法通用性較差[5]。這里,將研究九陀螺冗余配置單元的實驗室標定方法,力求既能有效地分離誤差參數,又具有一定的通用性。
1 九陀螺冗余測量單元
九陀螺冗余測量單元本體坐標系Oxyz與載體坐標系Oxbybzb重合,如圖1所示,9個單軸陀螺按G1,G2,…,G9的順序編號。陀螺測量單元的配置方式為:正交陀螺(G1,G4,G7)的敏感軸分別與本體坐標系Oxyz的各軸平行,然后以從本體坐標系的原點出發并與3個坐標軸的夾角相等的射線OO′為軸,旋轉40°得到的正交陀螺(G2,G5,G8)位置,再次旋轉40°得到的正交陀螺(G3,G6,G9)位置,9個陀螺恰好均勻分布在一個以O為頂點的圓錐體的錐面上。
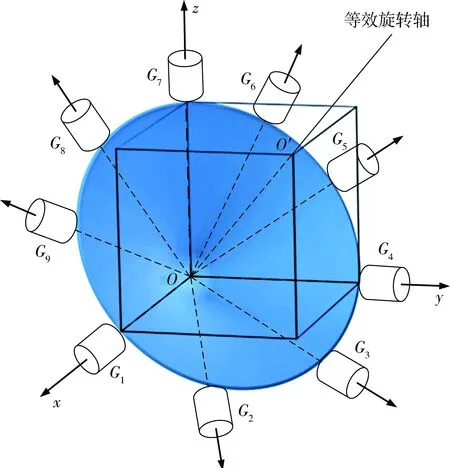
圖1 九陀螺冗余配置方式
設載體角速度在本體坐標系Oxyz的3個坐標軸上的投影為ω=[ωxωyωz]T,且9個陀螺的測量值為Z=[z1z2…z9]T。將各陀螺的測量噪聲考慮在內,設其測量噪聲為ζ=[ζ1ζ2…ζ9]T,并有如下統計特性
E{ζ}=0,E{ζζT}=σ2I9
(1)
根據九陀螺的配置方式,通過幾何計算得到9個陀螺的測量方程為
Z=HX
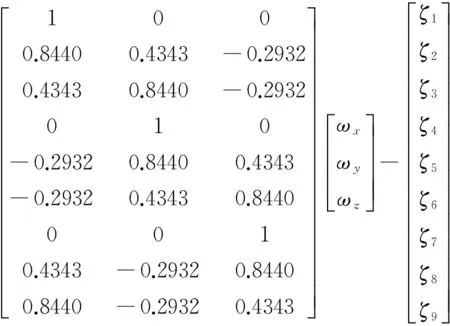
(2)
利用最小二乘估計
(3)
2 基于Kalman濾波的標定算法設計
2.1 冗余陀螺誤差定義
鑒于冗余配置的陀螺空間幾何關系比原始三軸配置方式復雜,通過傳統的速率試驗配合位置試驗對陀螺進行標定的難度較大,且對轉臺的精度要求較高。因此,采用Kalman濾波對冗余陀螺的誤差參數進行估計是相對簡單有效的方案。
為提高冗余陀螺測量單元的測量精度,需要對所有陀螺的輸出誤差模型進行定義,依據誤差模型設計標定算法,從而在陀螺標稱參數的基礎上對誤差進行補償。這里,為了不失一般性,假設冗余陀螺測量單元由n個陀螺組成,針對每個陀螺主要考慮以下3類陀螺誤差項。
(1) 常值誤差
由于陀螺的真實零偏與標稱零偏不一致而造成的測量誤差定義為常值誤差。由陀螺常值誤差引起的測量誤差為
Δmbi=bi
(4)
式中,bi為第i個陀螺的常值誤差。
(2) 標度因數誤差
由于陀螺的真實標度因數與標稱標度因數不一致而造成的測量誤差定義為標度因數誤差。由標度因數誤差引起的測量誤差為
(5)

(3) 安裝誤差
在冗余陀螺測量單元內部,各陀螺在裝配時不可避免地會與陀螺設計位置之間存在安裝誤差,從而產生測量誤差。為此,可以針對每個陀螺的安裝誤差各采用2個參數δui和δvi加以描述,從而由第i個陀螺安裝誤差引起的測量誤差為
Δmci=piδui+qiδvi
(6)
式中,pi,qi分別為第i個陀螺安裝誤差角的系數,具體表達形式將在下文詳細推導。
2.2 冗余陀螺安裝誤差建模
冗余陀螺安裝誤差的建模在標定算法的設計過程中起著舉足輕重的作用,模型的準確與否,直接關系到標定算法的優劣。這里,采用小角度旋轉向量來描述冗余陀螺的安裝誤差角。

(7)

(8)
(9)
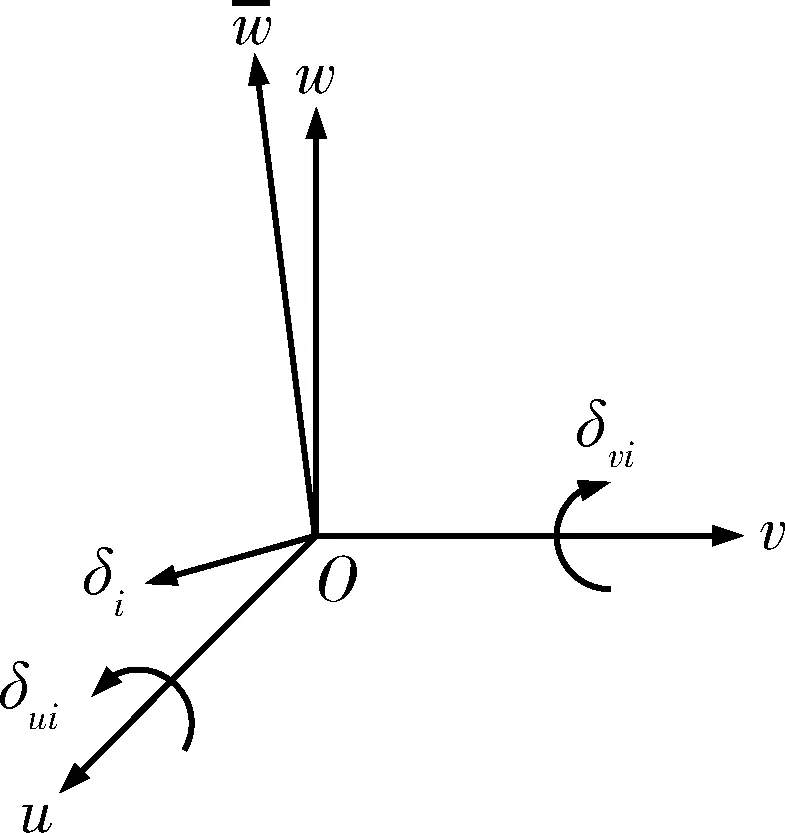
圖2 采用小角度旋轉向量表示的安裝誤差
δi=δuiui-δvivi
(10)
(11)
考慮n個陀螺的情況,定義

(12)
簡寫為
ωg=WTωt-Cv(ωt)δu-Cu(ωt)δv
(13)
其中,δu=[δu1δu2…δun]T,δv=[δv1δv2…δvn]T。這樣,就建立了各陀螺安裝誤差角的數學模型。
2.3 濾波器系統方程設計
在冗余陀螺標定濾波器的設計過程中,首先需要確定濾波器要估計的狀態變量。顯然,要估計的變量為常值誤差bi、標度因數誤差ksi以及安裝誤差δui和δvi。這里為了更簡便地說明問題,只以一個陀螺的誤差系數為例進行說明。在標定過程中,可以認為這些量是常數,即導數為0。所以,系統狀態方程可寫為
(14)
由式(14)所示的連續系統方程可知,其狀態轉移矩陣為
(15)
考慮采樣周期為Ts,式(14)離散化后滿足如下線性系統方程和量測方程
(16)
其狀態轉移矩陣為
(17)
由此,確定了Kalman濾波器的系統方程。
2.4 濾波器量測方程設計
濾波器的量測方程反映的是轉臺輸入角速率、陀螺輸出角速率及狀態變量三者之間的數學關系,下面對濾波器的量測方程進行設計。
當只考慮陀螺的標度因數誤差ksi,常值誤差bi和隨機誤差ζi時,第i個陀螺的輸出角速率為
(18)
那么,n個陀螺的輸出角速率可以表示成如下形式
ωm=(I-Ks)ωg-B-ζ
(19)
其中,Ks=diag(k1k2…kn),B=[b1b2…bn]T。
根據式(13)和(19),將各陀螺的安裝誤差考慮在內,陀螺測量值與轉臺輸入角速率之間的關系為
ωm=(I-Ks)[WTωt-Cv(ωt)δu-
Cu(ωt)δv]-B-ζ
(20)
由于陀螺測量誤差ksi,bi,δui和δvi都可以認為是小量,忽略二階小量后,將式(20)化簡為
ωm=WTωt-Cv(ωt)δu-Cu(ωt)δv-
[WTωt]k-B-ζ
(21)
其中,[WTωt]=diag(WTωt),為n×n矩陣;k=[k1k2…kn]T。為便于計算,將式(21)寫成如下形式
ωm=WTωt-(VΔu+UΔv+WKs)Tωt-B-ζ
(22)
其中,Δu=diag(δu1δu2…δun),Δv=diag(δv1δv2…δvn)。

(23)
其中,G=WT。由于G列滿秩,存在N為G的左零空間正交基,且具備如下性質[6]
(24)
則式(23)可以表示為
(25)
其中,E1=(GTG)-1GT(VΔu+UΔv+WKs)T,B1=(GTG)-1GTB,E2=NT(VΔu+UΔv+WKs)T,B2=NTB。
參照式(21)的形式,將式(25)寫成矩陣形式
(26)
其中,G*=(GTG)-1GT=(WWT)-1W
(27)
至此,便得到了經過零空間擴增后的標定濾波器量測方程。
3 試驗及結果分析
3.1 試驗設定
針對九陀螺冗余配置方式,設九陀螺冗余測量單元標定濾波器的狀態變量為
δv1…δv9]T,則滿足式(16)的狀態轉移矩陣為Ak=I36×36,觀測矩陣為

在標定濾波器設計完成后,通過仿真標定試驗檢驗濾波器對狀態量估計的精度和速度。這里,為了方便,將9個陀螺的誤差設置為相同的參數,具體詳見表1所示。
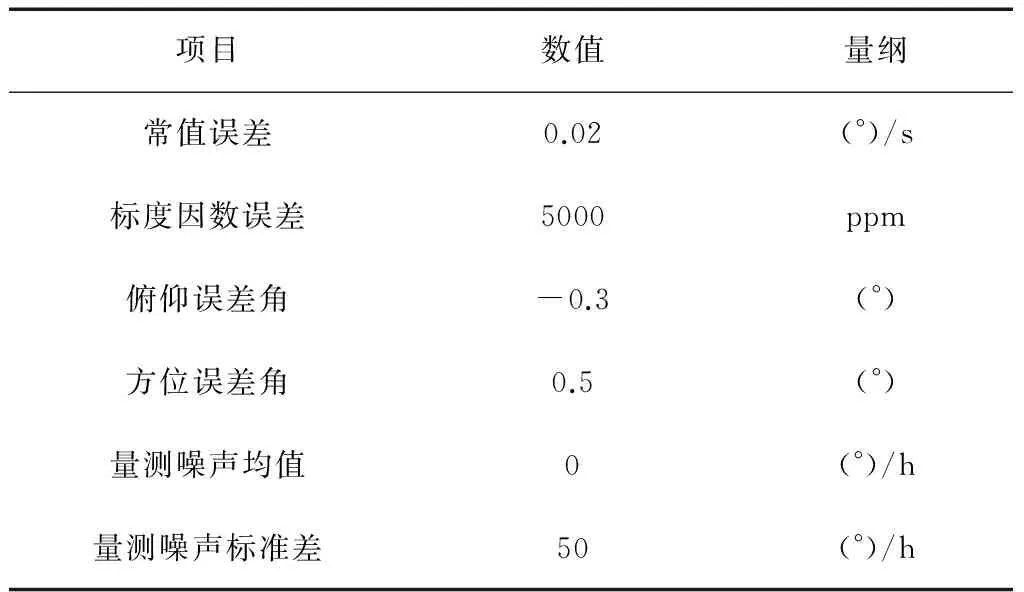
表1 標定仿真參數
參照文獻[7-8]的方法,并結合以往標定經驗,確定轉臺中、內、外框依次以均勻角速率轉動,該方案如圖3所示,轉臺三框角速率均取20(°)/s,標定時間取600s。
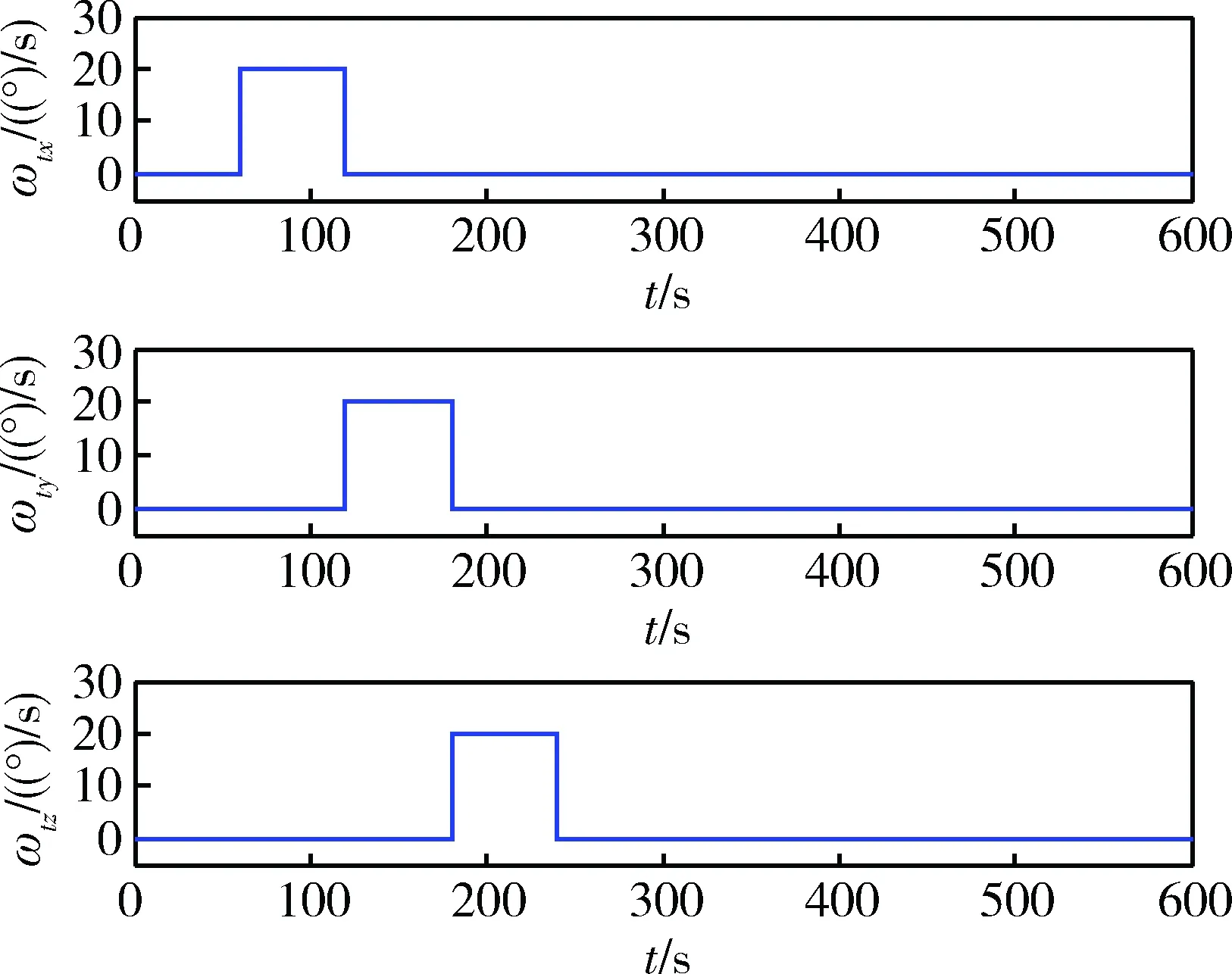
圖3 轉臺運行方式
3.2 試驗結果及分析
通過模擬轉臺的運行,實時更新量測方程,并利用Kalman濾波器將36個誤差參數估計出來。在標定過程中,9個陀螺各自的測量值如圖4所示。
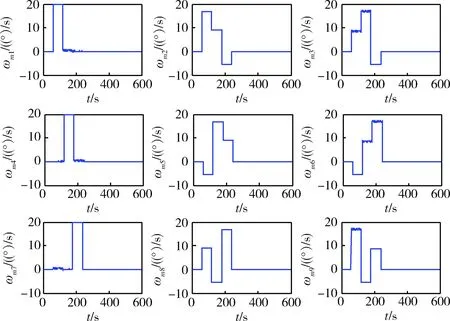
圖4 各陀螺的輸出角速率
通過600s的標定試驗,在450s后,9個陀螺各自的4個誤差參數均已收斂到給定值。受篇幅所限,圖5給出了1號陀螺各自誤差系數的估計結果.由圖可知,隨著轉臺的運行,雖然每個陀螺各自的誤差參數估計情況不盡相同,但均在仿真試驗結束時收斂到真實值。圖中各狀態變量估計的±1σ誤差帶也反映出濾波器的估計性能,在試驗結束時,各誤差參數估計的誤差帶均已趨于0,說明濾波器對各個誤差參數的估計精度非常可觀。
需要說明的是,雖然標定濾波器中各狀態變量的可觀測性取決于系統模型,與轉臺的運行方式無直接關聯,但通過對試驗編排方式的設計,能夠有效地激勵各誤差參數的收斂,縮短標定試驗時間。
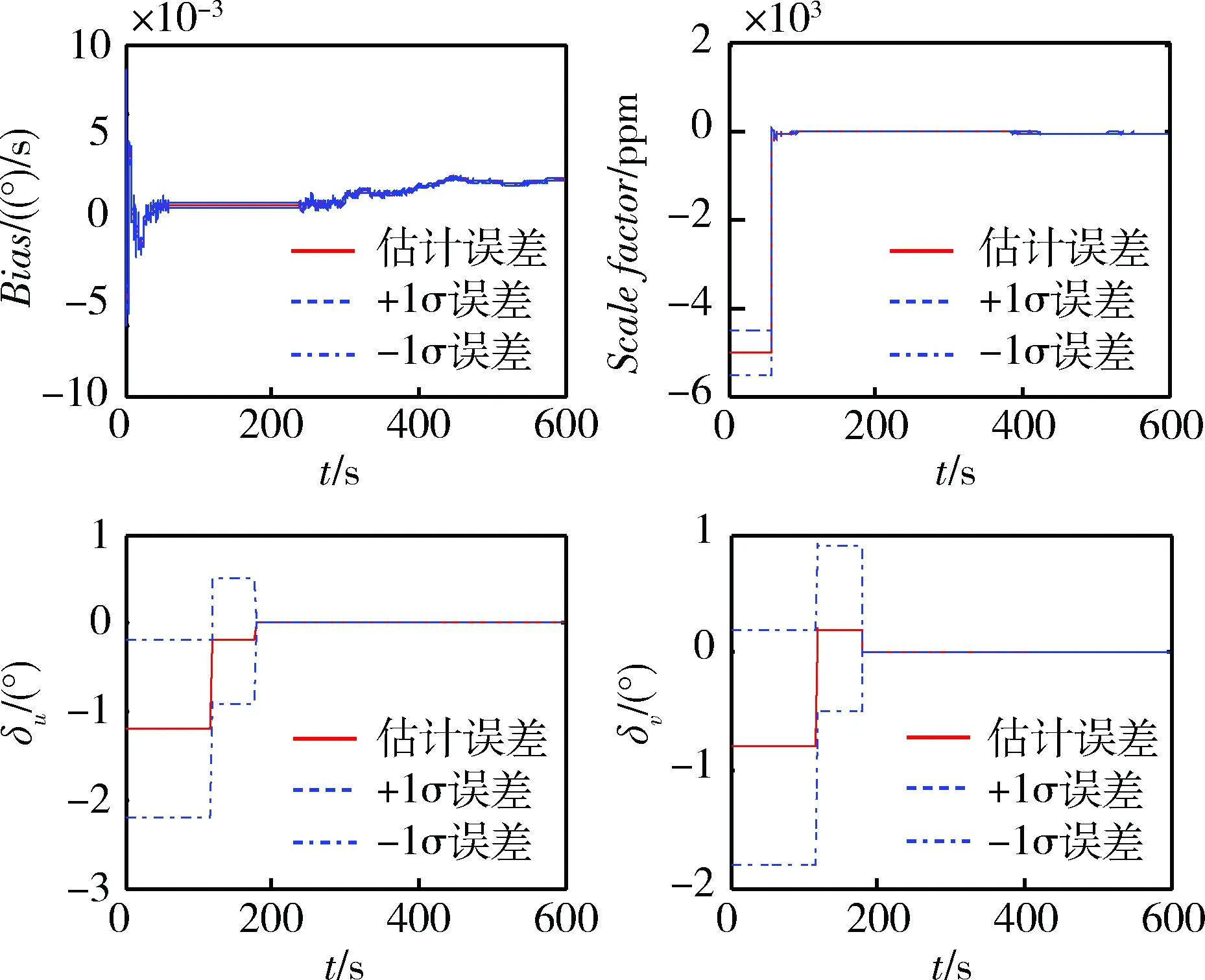
圖5 1號陀螺的估計誤差
為了更為直觀地反映誤差參數的估計精度,引入平均相對誤差作為評估指標[9]:
(28)

表2 標定試驗評估指標
4 結束語
針對冗余陀螺測量單元的實驗室標定方法,建立了包括標度因數誤差、常值誤差和安裝誤差的模型,設計了Kalman濾波器對各個誤差參數進行估計,并采用零空間擴增法來改善各狀態變量的可觀測度,仿真試驗表明此標定方法可行有效,且具備一定的通用性。
[1] 鄧超.捷聯慣導系統中微機械陀螺測試參數的分析與標定[J].艦船電子工程,2008,28(11): 67-69. (Deng Chao. Calibration of MEMS Gyro in Strapdown Inertial Navigation System [J]. Ship Electronic Engineering, 2008, 28(11): 67-69.)
[2] 李建利,房建成.改進的MEMS陀螺靜態誤差模型及標定方法[J].宇航學報,2007,28(6): 1614-1618. (Li Jianli, Fang Jiancheng. The Improved Static Error Model of Micromechanical Gyaroscope and Calibration [J]. Journal of Astronautics, 2007,28(6): 1614-1618.)
[3] 李杰,洪惠惠,張文棟.MEMS微慣性測量組合標定技術研究[J].傳感技術學報,2008,21(7):1169-1173. (Li Jie, Hong Huihui, Zhang Wendong. Research on Calibration Techniques for MEMS-Micro Inertial Measurement Unit [J]. Chinese Journal of Sensors and Actuators, 2008,21(7):1169-1173.)
[4] 劉秉,閆建國.一種小型慣性測量單元的精確標定技術[J].計算機測量與控制,2009,17(11): 2170-2172. (Liu Bing, Yan Jianguo. Precision-calibration Technique for Inertial Measurement Units [J]. Computer Measurement & Control, 2009,17(11): 2170-2172.)
[5] Hua Bing, Liu Jiangye, Li Rongbing, Niu Xinyuan. A study on turning calibration technology of MEMS-SINS with redundant configuration[J]. Journal of Astronautics, 2009, 30(2): 468-472.
[6] 卜長江,羅躍生.矩陣論[M].哈爾濱:哈爾濱工程大學出版社,2003: 53-60.(Bu Changjiang, Luo Yuesheng. Theory of Matrices[M]. Harbin: Harbin Engineering University Press, 2003:53-60.)
[7] Bar Itzhack. Implicit and explicit spacecraft gyro calibration [R]. AIAA2004.
[8] 楊華波,張士峰,蔡洪.空間冗余陀螺儀在軌標定方法[J].宇航學報,2010,31(1):104-110. (Yang Hua-bo, Zhang Shifeng, Cai Hong. An In-Flight Calibration for Redundant Inertial Measurement Gyroscope [J]. Journal of Astronautics, 2010,31(1):104-110.)
[9] 張士峰,楊華波,蔡洪.慣性制導武器精度分析與評估[M].長沙:國防科技大學出版社,2008:127-128. (Zhang Shifeng, Yang Huabo, Cai Hong. Analysis and Evaluation of the Accuracy of Inertial Guidance Weapon [M]. Changsha: National University of Defense Technology Press, 2008: 127- 128.)
Method of Laboratory Calibration for Redundant Gyroscope Unit
Liang Haibo1,2, Liang Jie1, Meng Gong1, Xu Hao1, Lv Zhanggang1
1. Beijing Aerospace Automatic Control Institute, Beijing 100854, China 2. National Key Laboratory of Science and Technology on Aerospace Intelligence Control, Beijing 100854, China
Torealizethelaboratorycalibrationforredundantgyroscopeunit,amethodbasedonKalmanfilteringispresented.Themisalignmentanglesofredundantgyroscopesaremodelledbysmallanglerotationvectormethod,andtheKalmanfilterofcalibrationisdesigned.Furthermore,amethodofzero-spaceamplificationisproposedtoimprovetheobservabilityofthefilterstateswhenthemeasurementequationsofthecalibrationfilteraredesigned.Bysimulationtest,itshowsthatallthestatescanbeestimatedaccuratelywiththeaverage-relative-errorpercentbylessthan1%,whichprovestheeffectivenessofthiscalibrationmethod.
Calibration;Redundantgyroscopes; Kalmanfiltering;Zero-spaceamplification
2014-06-04
梁海波(1984-),男,天津人,博士,工程師,主要研究方向為MEMS慣性導航與組合導航技術;梁 婕(1980-),女,四川人,碩士,高級工程師,主要研究方向為控制系統電氣設計技術;孟 恭(1986-),男,山西人,碩士,工程師,主要研究方向為控制系統電氣設計技術;許 昊(1988-),男,北京人,碩士,工程師,主要研究方向為控制系統電氣設計技術;呂章剛(1986-),男,山東人,碩士,工程師,主要研究方向為控制系統電氣設計技術。
V441
A
1006-3242(2016)01-0009-06
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36