飛行器控制系統全流程半實物仿真技術研究
2016-08-10 10:36:17韓利軍
航天控制 2016年1期
趙 耀 黎 陽 韓利軍 董 純
北京航天自動控制研究所,北京 100854
?
飛行器控制系統全流程半實物仿真技術研究
趙 耀 黎 陽 韓利軍 董 純
北京航天自動控制研究所,北京 100854
根據某型飛行器控制系統的組成特點,將電氣系統綜合試驗與制導控制仿真試驗相結合,開展了全流程半實物仿真技術研究。以飛行控制設備、地面測發控設備與仿真試驗設備為主體,構建了控制系統全流程半實物仿真試驗系統,并以該飛行器為研究對象開展了基于RTX的全流程半實物實時仿真,對飛行器從射前測試、發射控制到各段飛行的完整過程進行了仿真驗證。結果表明,本系統運行穩定、可靠性高,可以為飛行器控制系統的集成仿真測試提供技術平臺。關鍵詞 控制系統;全流程;半實物仿真;RTX
航天仿真技術是指仿真技術與航天工程技術的結合,為航天運輸系統和導彈武器系統的設計分析、性能評估、故障診斷、運行管理等提供數學或半實物的模擬驗證手段和平臺[1]。其中,半實物仿真以其成本低、可靠性高和可重復性好等優點,在航天型號研制過程中具有十分重要的地位。在目前飛行器控制系統的研制過程中,半實物仿真主要集中在制導控制仿真試驗階段開展,與電氣系統綜合試驗是分開進行的。這兩類試驗各有側重:綜合試驗屬于開環測試,僅對系統電氣接口進行功能性和匹配性測試,對全系統測試的強度和覆蓋性均不夠;制導控制仿真屬于閉環測試,重點對飛行過程中控制算法設計的合理性、實現的正確性以及部分單機的性能進行考核,但是這類試驗的系統構成不完整,因為地面測發控系統通常不參與試驗[2]。
開環綜合測試與閉環仿真試驗的獨立開展,缺乏對控制系統全發射流程工作性能的整體檢驗,造成射前測發控與飛行仿真兩個階段的測試沒有完整聯系在一起,對飛行器從射前流程控制到點火起飛直至飛行結束的全發射流程沒有進行覆蓋考核。目前,隨著航天型號電氣設計技術與仿真試驗技術的發展,將綜合試驗與仿真試驗相結合,開展全系統、全發射流程的半實物閉環集成仿真驗證是未來的發展趨勢[2],這無論對于全系統性能的綜合驗證還是對于靶場發射的模擬演練都具有非常重要的意義[3]。
針對該研究內容,本文依據某型飛行器控制系統的組成特點,利用主要飛行控制設備、地面測發控設備和仿真試驗設備,設計了控制系統全流程半實物仿真系統,可以實現涵蓋測試、發射和飛行各階段的全流程仿真以及故障注入仿真,同時開發了Windows+RTX環境下的全流程實時仿真軟件用于配合試驗開展[4]。在此基礎上,以該飛行器為研究對象開展了全流程半實物仿真試驗,對控制系統的工作性能以及抗干擾能力進行了檢驗。
1 全流程半實物仿真系統構成
全流程半實物仿真試驗的目的主要是將傳統電氣系統綜合試驗與制導控制仿真試驗相結合,考核飛行器從“射前測試→發射控制→點火起飛→各段飛行→飛行結束”全發射流程中整個控制系統軟硬件的工作性能。為了提高仿真可信度,在試驗系統構建時盡可能多的使用了電氣綜合、地面測發控設備的正式產品及相關軟件,系統中不能使用實物的部分由實時仿真計算機、物理等效器和其它仿真設備等效代替。
1.1 系統組成
本系統主要由地面、飛行和仿真三類設備組成:其中地面設備主要包括中心計算機、中心控制臺、諸元生成計算機、數據存儲計算機和其他外部設備,實現飛行器發射前的諸元生成、系統測試和發射控制等功能;飛行設備主要包括平臺、速率陀螺、飛控計算機、伺服控制器及執行機構,實現飛行仿真過程中飛行器姿態獲取、導航制導、姿控計算以及控制伺服機構運動等功能;仿真設備包括實時仿真計算機、伺服擺角測量裝置、三軸轉臺及轉臺控制計算機、專用電纜網和信號轉接設備等,主要實現運動方程計算、仿真過程管理以及仿真試驗數據顯示和存儲等功能。這三類設備之間通過以太網和數字總線連接,實現全系統指令傳輸與數據交互。試驗開展前,通過設計、生產專用電纜網和信號轉接設備將地面、飛行與仿真機、三軸轉臺等仿真設備相連接。圖1為全流程仿真試驗系統的組成框圖。
1.2 仿真原理
飛行器控制系統全流程仿真試驗主要包括射前控制和飛行仿真兩部分。射前流程控制部分由中心計算機、中心控制臺以及其他地面設備配合完成飛行器起飛前的地面測試和發射控制,包括系統測試、諸元計算和飛行軟件上傳等工作,驗證地面測發控系統與飛行、仿真等外系統的協調匹配性;飛行仿真部分以中心計算機發出點火指令作為飛行時間零點,進行飛行器飛行過程的六自由度半實物仿真,驗證飛控計算機、平臺、速率陀螺、伺服機構和飛行軟件等軟硬件的有效性和匹配性。具體仿真流程為:在每一個計算周期,仿真機進行飛行器本體六自由度數學模型解算,并根據計算出的姿態角驅動三軸轉臺轉動,安裝在轉臺上的平臺和速率陀螺將測量到的姿態角和角速度信息發送至飛控計算機,飛行軟件利用平臺和速率陀螺數據進行導航、制導計算,經過姿控網絡后形成伺服控制指令,并通過數字總線和I/O接口發送至伺服控制器。伺服機構帶動負載裝置做相應的擺動,安裝在伺服上的測量裝置將擺角測量值發送回仿真機,用于下一周期的飛行器六自由度模型計算,從而完成控制系統的閉環仿真。
由于本仿真試驗包含硬件設備多,系統較為龐大,為了保證全系統運行的一致性,需要使用統一的時鐘頻標信號。該信號由平臺輸出,通過電纜送到飛控計算機和實時仿真計算機等硬件設備,試驗時實時仿真軟件與飛行控制軟件進行時間同步,確保系統正常運行,與真實發射過程保持一致。
2 仿真系統軟硬件設計
全流程半實物仿真系統的軟硬件由于專用性高,功能性強,為了滿足試驗需求,絕大多數為自主設計與研制,包括實時仿真計算機、全流程仿真軟件和伺服擺角測量裝置等。
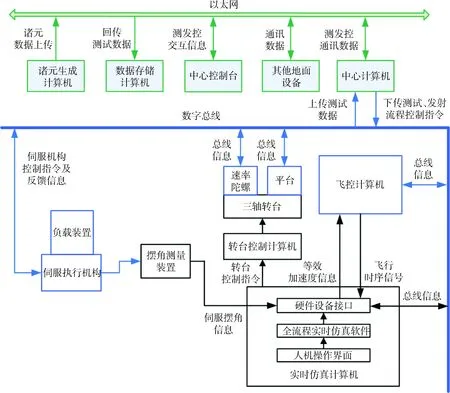
圖1 全流程半實物仿真系統組成圖
2.1 實時仿真計算機系統
本仿真系統中的實時仿真計算機為自主研制開發,如圖2所示,采用9U Compact PCI雙系統平臺,內嵌多核處理器模件、時序和開關量模件、數字總線模件、以太網模件、光纖反射內存模件和電源模件等,能夠實現飛行器六自由度數學運動方程解算、單機數學特性模擬、仿真裝置控制與飛控設備硬件接口交互等功能,此外還承擔著全流程半實物仿真試驗流程控制和試驗數據存儲的職責。
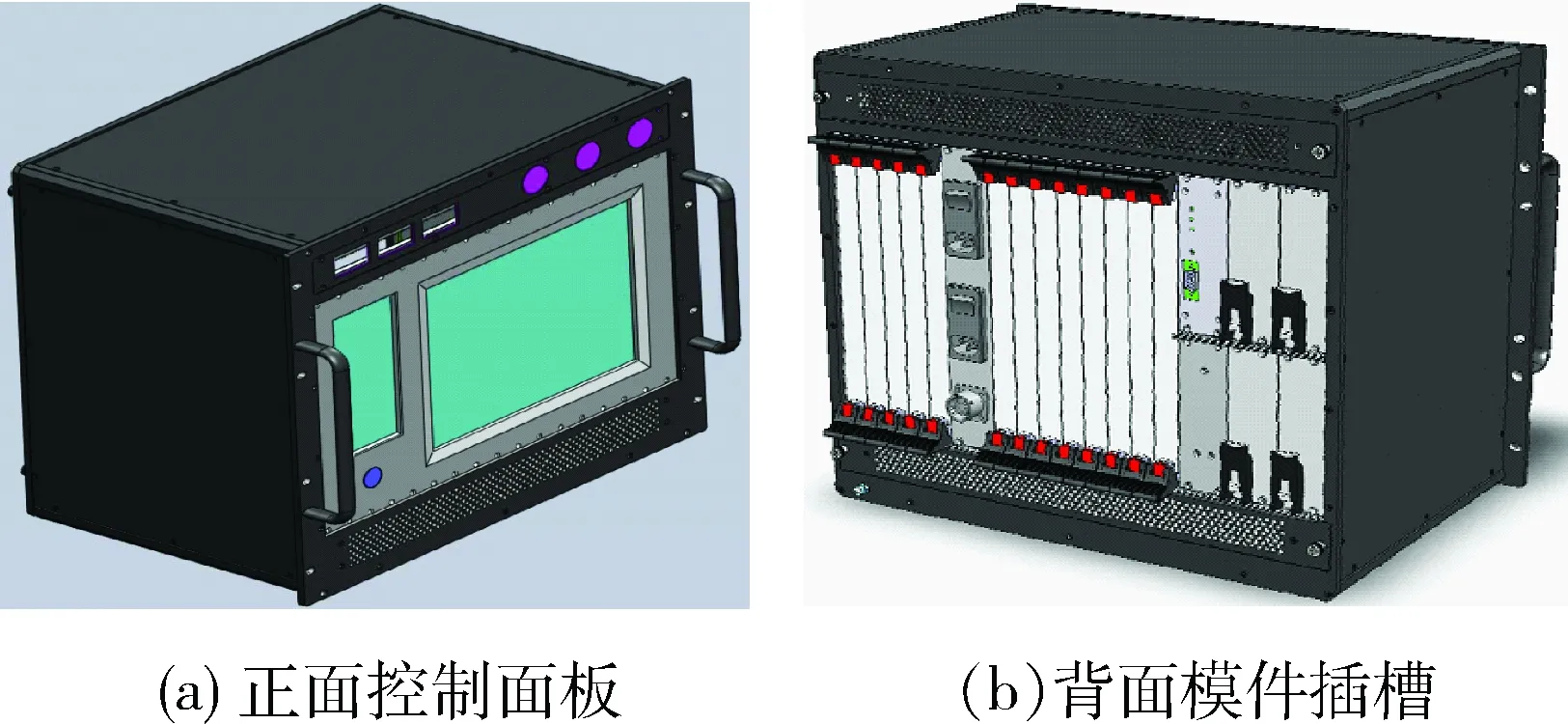
圖2 實時仿真計算機外觀圖
表1為實時仿真計算機中包含的主要模件及實現的功能。考慮到開發和后續使用的方便性,仿真計算機操作系統采用Windows,實時環境采用IntervalZero公司的RTX實時擴展模塊實現。RTX是目前基于Windows平臺的唯一純軟件的硬實時擴展子系統,在半實物實時仿真方面得到了廣泛應用[5-6]。RTX不對Windows系統進行任何的封裝或修改,僅通過在HAL層增加實時HAL擴展來實現基于優先級的搶占式實時任務管理和調度。其實時子系統RTSS的線程優先于所有Windows線程,提供了對中斷、I/O、內存的精確的直接控制,從而確保實時任務的100%可靠性。另外,使用RTX自帶的RTAPI函數庫可以方便進行可視化編程與調試,極大提高了開發效率。
2.2 全流程實時仿真軟件設計
全流程實時仿真軟件運行于仿真計算機,采用C/C++開發,是整個仿真試驗系統的核心軟件之一,其結構框架如圖3所示。軟件包括上下層兩個工程:上層在Win32環境下運行,完成仿真試驗進程的管理、試驗曲線實時顯示和試驗數據存儲等功能;下層在RTX實時環境下運行,將VC工程編譯生成RTSS進程,供上層工程調用開展RTX實時仿真,上下層工程通過在系統中開辟一塊獨立的共享內存進行數據交互。下層按照功能進一步分為發射流程控制和飛行實時仿真兩部分。發射流程控制部分主要配合中心計算機軟件完成射前各項測試流程;飛行實時仿真模塊主要完成飛行器飛行過程中的六自由度半實物仿真,與飛行控制軟件、伺服擺角測量軟件進行數據交互形成閉環仿真,此外通過狀態字設置可以方便實現等效器/半實物仿真狀態切換。
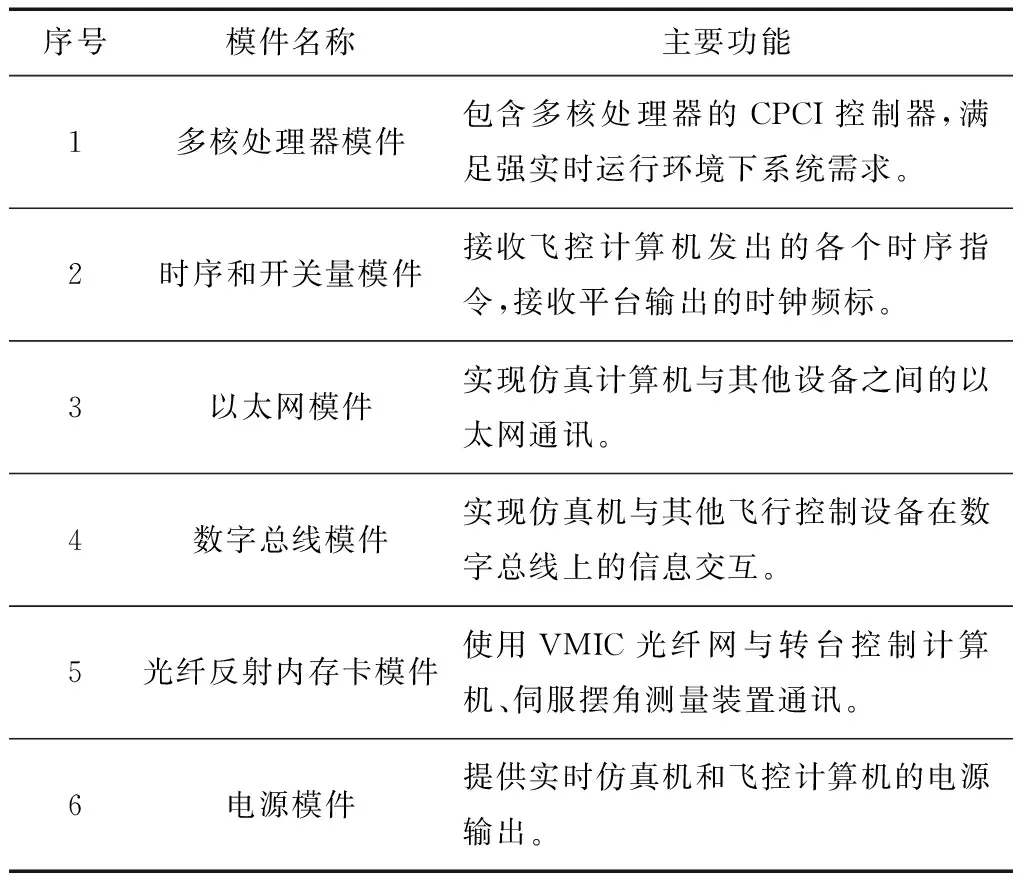
表1 實時仿真計算機模件及功能
下層RTX工程的發射流程控制與飛行實時仿真根據功能進一步劃分為不同的模塊,如圖4所示。
2.3 光學非接觸式伺服擺角測量
由于該型飛行器伺服負載的體積、材料等原因,如果直接在伺服上安裝傳統的接觸式擺角測量裝置,會造成擺角數據測量不準確,直接影響到仿真試驗結果的真實性。另外,伺服擺角測量數據的回傳要求有很高的實時性,以確保仿真軟件中的飛行器運動方程使用當前周期的伺服擺角進行數學模型計算。
針對以上需求,為了提高伺服擺角測量的正確性和實時性,本系統在設計過程中采用了光學非接觸式伺服擺角測量技術。飛行器裝有2個伺服機構1和2,通過伸縮帶動負載擺動(如圖5所示)。用高速攝像機對伺服負載擺動位置進行檢測,通過實時圖像處理和空間坐標系角度解算關系求出伺服擺角值,經VMIC光纖反射內存卡傳送回實時仿真計算機,如圖5所示。該技術的應用,既確保了擺角測量精度的準確性,又提高了數據傳輸速度,確保了全流程仿真試驗結果的真實可信性。
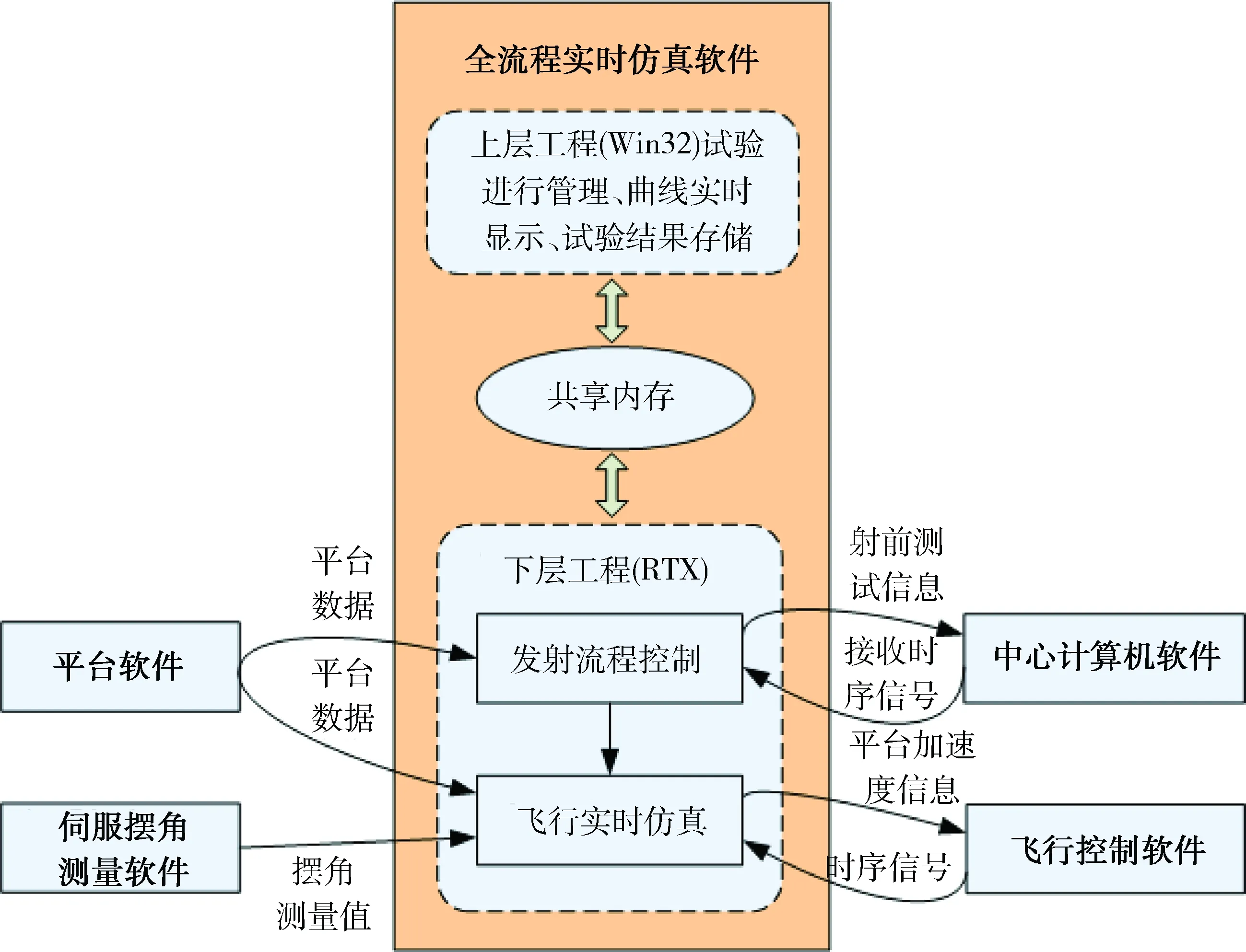
圖3 實時仿真軟件架構及與其他軟件交互關系圖
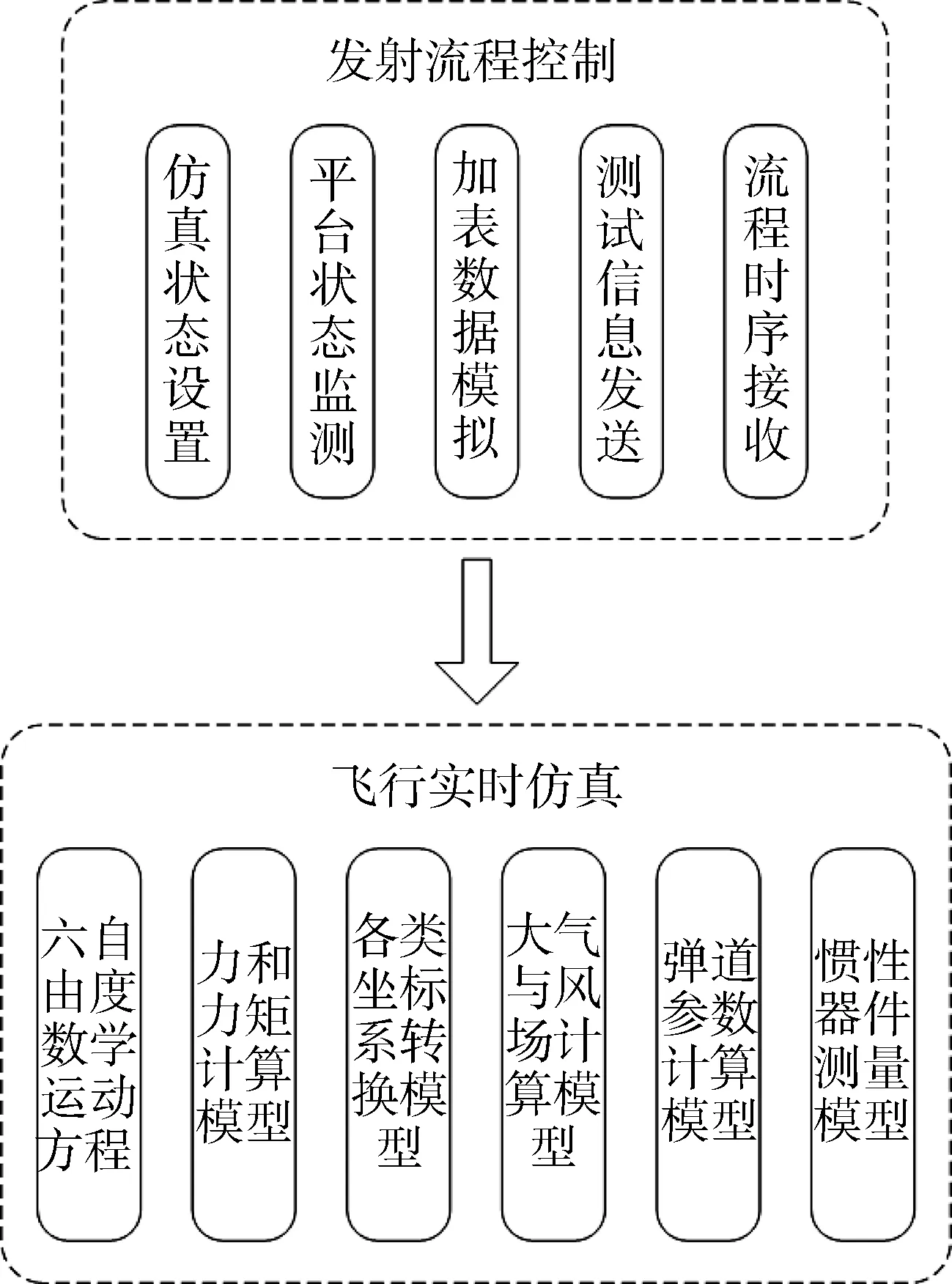
圖4 下層工程模塊劃分
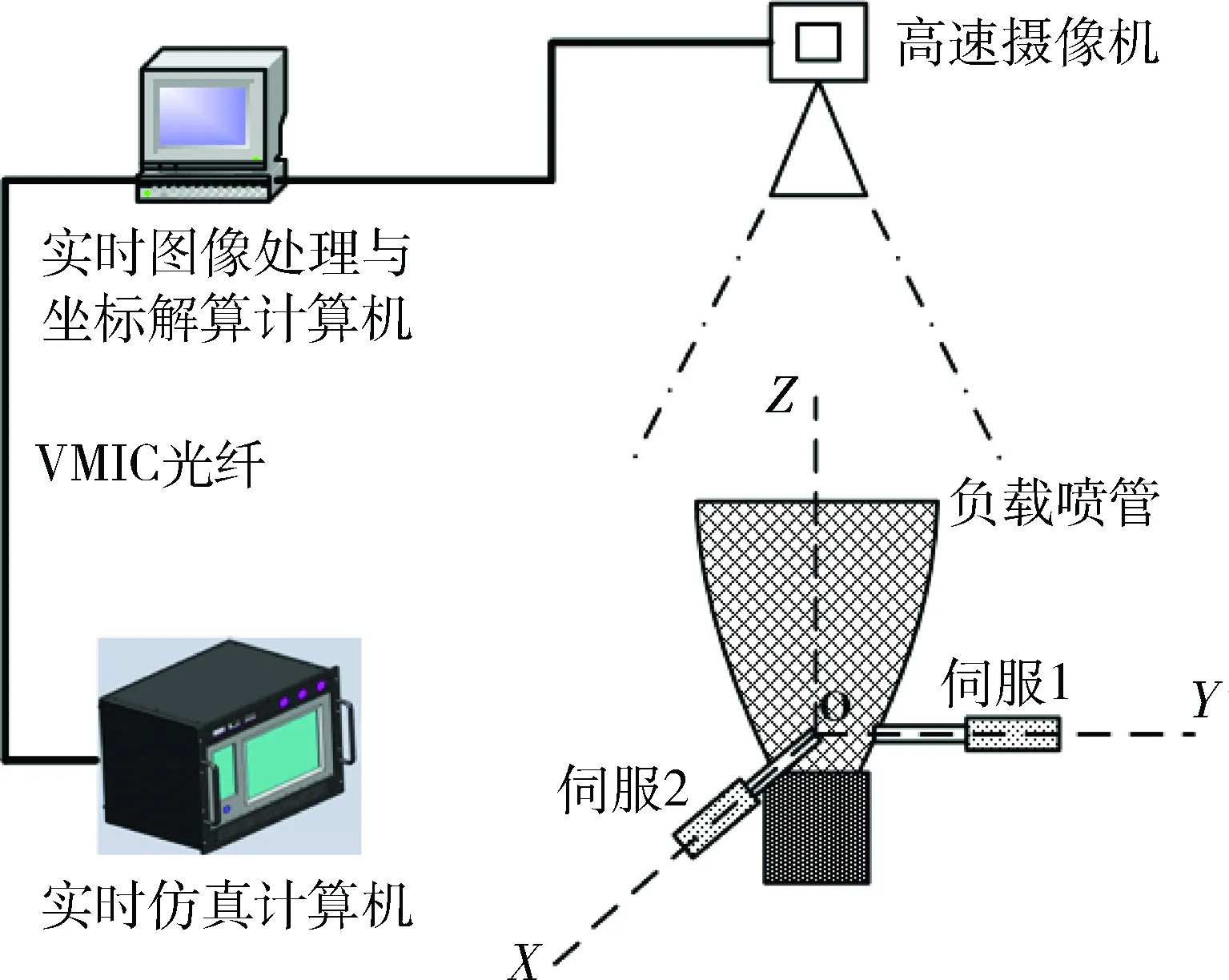
圖5 光學非接觸式伺服擺角測量示意圖
3 仿真系統試驗應用
仿真試驗系統研制完成后,以該飛行器為對象開展了基于RTX的全流程半實物實時仿真試驗,檢驗從射前測試、發射控制到各段飛行直至飛行結束全發射流程中控制系統運行的穩定性和軟硬件的協調匹配性。此外,本試驗系統還具備故障注入仿真能力,針對數字總線、以太網、飛行軟件等軟硬件可設置多類故障用例,如:斷開雙冗余總線中的1條、增加網絡負載率、加入電磁脈沖干擾等,在全流程仿真過程中開展了故障注入仿真研究,考核控制系統對干擾的適應性和魯棒性,同時也能檢驗系統出現故障時各項應急預案的可行性。
圖6~8為系統通信鏈路注入電磁脈沖干擾時的飛行器俯仰、偏航、滾動三通道姿態角偏差(預定程序角與實際姿態角之差),可以看出在故障干擾條件下,雖然系統通訊受到一定影響,使得初始飛行段姿態角偏差較大,但由于控制系統具有較強的魯棒性,能夠抑制干擾影響,將姿態角偏差基本控制在±2°的較小范圍內,因此順利完成了全程飛行仿真。
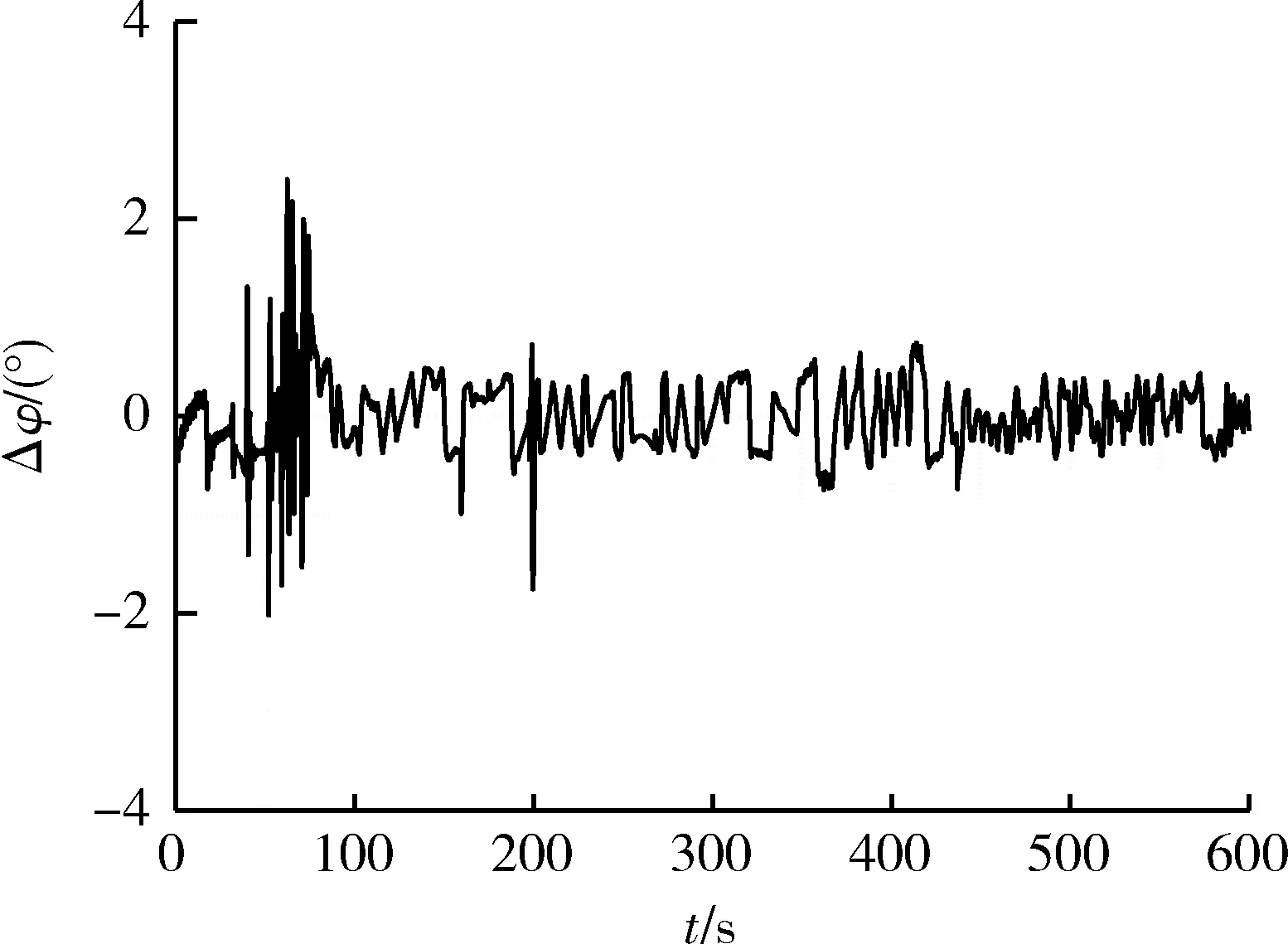
圖6 干擾狀態下的俯仰姿態角偏差
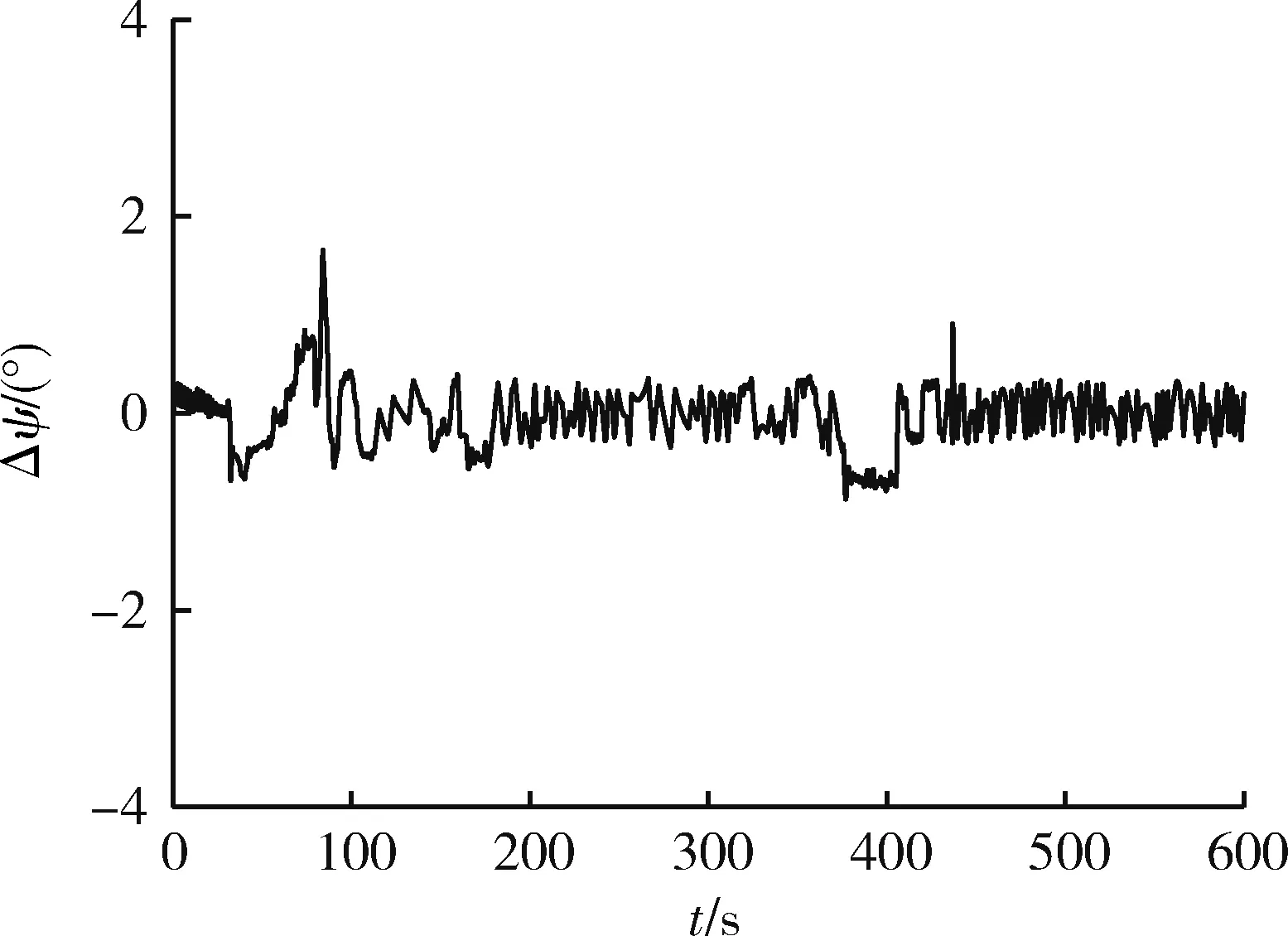
圖7 干擾狀態下的偏航姿態角偏差
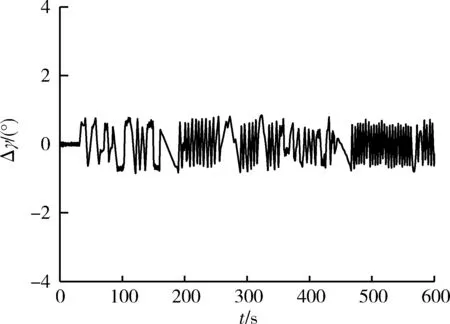
圖8 干擾狀態下的滾動姿態角偏差
4 結論
研究了某飛行器控制系統全流程半實物仿真技術,根據其控制系統的組成及仿真要求,設計研制了基于Windows+RTX的實時仿真計算機、伺服擺角測量裝置,開發了全流程實時仿真軟件,構建了控制系統全流程半實物仿真試驗系統,并將本系統應用于該飛行器的全流程仿真試驗,考核了從射前測試、發射控制到點火起飛直至飛行結束全過程中控制系統的有效性以及對干擾的魯棒性。
本文提出的全流程仿真技術將型號傳統研制模式中的綜合試驗與仿真試驗相結合,開展制導、姿態控制和電氣綜合等全系統、全流程的半實物集成仿真驗證,對系統性能考核更全面,測試覆蓋性更強。文中的研究思路和設計方法對相關航天器開展類似試驗的分析與設計具有一定的參考價值,可供借鑒使用。
[1] 包為民.對航天器仿真技術發展趨勢的思考[J]. 航天控制, 2013, 31(2): 4-9.(Bao Weimin. The Development Trend of Aerospace Craft Simulation Technology[J]. Aerospace Control, 2013, 31(2): 4-9.)
[2] 宋征宇.新一代航天運輸系統測發控技術發展的方向[J]. 航天控制, 2013, 31(4): 3-9, 14.(Song Zhengyu. The Development Trend of Test and Launch Control Technology on Future Space Transportation System[J]. Aerospace Control, 2013, 31(4): 3-9,14.)
[3] 陸晉榮,樊忠澤,聶沖.航天發射仿真一體化系統[J]. 載人航天, 2009, 15(3): 23-29.(Lu Jinrong, Fan Zhongze, Nie Chong. The Integrated Simulation and Training System for Space Launch[J]. Manned Spaceflight, 2009, 15(3): 23-29.)
[4] 閆宇壯,楊祚堂. RTX在半實物仿真中的軟件開發方法[J].兵工自動化, 2006, 25(9): 89-90.(Yan Yuzhuang, Yang Zuotang. Software Development Methods of RTX in HIL Simulation[J]. Ordnance Industry Automation, 2006, 25(9): 89-90.)
[5] 劉同栓, 郭曉月. RTX在半實物仿真系統中的應用[J]. 航空精密制造技術, 2010, 46(4): 50-52.(Liu Tongshuan, Guo Xiaoyue. Hardware-in-the-loop Simulation Based on RTX[J]. Aviation Precision Manufacturing Technology, 2010, 46(4): 50-52.)
[6] 周林雪,李巖,王建軍,方艷超.基于RTX的激光制導武器半實物仿真研究[J].計算機仿真, 2013, 30(1): 45-49, 119.(Zhou Linxue, Li Yan, Wang Jianjun, Fang Yanchao. Research on Semi-physical Simulation System for Laser-guided Weapon Based on RTX[J]. Computer Simulation, 2013, 30(1): 45-49, 119.)
Research of Whole Process Hardware-in-the-loop Simulation of Aircraft Control System
Zhao Yao, Li Yang, Han Lijun, Dong Chun
Beijing Aerospace Automatic Control Institute,Beijing 100854,China
Accordingtotheconstructioncharacteristicsofsometypeaircraftcontrolsystem,theelectricalsystemintegrationexperimentandguidancesystemsimulationarecombinedandthewholeprocesshardware-in-the-loop(HITL)simulationtechnologyisstudied.Basedontheflyingcontrolequipment,launchcontrolequipmentandsimulationequipment,awholeprocessHITLsimulationsystemofaircraftcontrolsystemisestablished.ThepresentedsystemissuccessfullyappliedtothewholeprocessHITL RTXrealtimesimulationoftheaircraft.Thetest,launchcontrolandflyingprocessofaircraftaresimulatedandimplemented,andtheresultsshowthatthesimulationsystemisstableandhighreliable.Therefore,thepresentedsystemcansupplyatechnicalplatformfortheintegratedsimulationtestofaircraftcontrolsystem.
Controlsystem;Wholeprocess;Hardware-in-the-loopsimulation; RTX
2015-03-16
趙 耀(1984-),男,河北人,碩士,工程師,主要從事系統仿真研究;黎 陽(1965-),男,北京人,碩士,高級工程師,主要從事系統仿真研究;韓利軍(1982-),男,河北人,碩士,工程師,主要從事飛行器導航、制導與控制研究;董 純(1980-),男,江西人,碩士,高級工程師,主要從事飛行器導航、制導與控制研究。
V448.25+3
A
1006-3242(2016)01-0078-06