簡化平方根容積卡爾曼濾波的INS/GPS緊組合算法*
2016-08-10 10:36:17郝順義吳訓忠
航天控制 2016年1期
沈 飛 郝順義 吳訓忠 郭 創(chuàng) 楊 彬
空軍工程大學航空航天工程學院,西安 710038
?
簡化平方根容積卡爾曼濾波的INS/GPS緊組合算法*
沈 飛 郝順義 吳訓忠 郭 創(chuàng) 楊 彬
空軍工程大學航空航天工程學院,西安 710038
針對INS/GPS緊組合導航系統(tǒng)非線性模型解算的實時性問題,提出了一種用簡化平方根容積卡爾曼濾波算法(RSCKF)提高緊組合導航系統(tǒng)運算速度的方法,它是在時間更新環(huán)節(jié)將平方根容積卡爾曼濾波(SCKF)簡化,簡化后直接用狀態(tài)轉(zhuǎn)移矩陣求取狀態(tài)一步預測和預測協(xié)方差矩陣,避免了原算法中采用求容積點近似計算的復雜過程。仿真實驗將RSCKF算法與SCKF濾波算法、擴展卡爾曼濾波算法(EKF)的結(jié)果對比。結(jié)果表明,RSCKF,SCKF兩種算法的估計精度要明顯高于EKF算法,而且在保證估計精度相當?shù)那闆r下,RSCKF算法可大大降低系統(tǒng)運算量。 關(guān)鍵詞 INS/GPS組合導航;緊組合;RSCKF;非線性模型
INS/GPS組合導航系統(tǒng)本質(zhì)是非線性的,但為了減少計算量、提高其實時性,通過某些假設條件,可忽略系統(tǒng)的非線性因素,將其用線性化的數(shù)學模型來近似描述,這時的導航系統(tǒng)一般采用線性卡爾曼濾波算法進行狀態(tài)估計[1]。然而,當假設條件不滿足時,組合導航系統(tǒng)就必須采用能反映自身實際特性的非線性模型來描述[2-3],事實上,采用非線性模型更能完整地傳播系統(tǒng)誤差特性,而此時要想對系統(tǒng)的狀態(tài)進行準確估計,線性的卡爾曼濾波已不再適用,必須采用非線性濾波才能解決問題[4-5]。針對此問題,可以采用擴展卡爾曼濾波(EKF),該算法主要是對非線性系統(tǒng)進行線性化。但是,當系統(tǒng)非線性度較強時,忽略泰勒展開的高階項,會引入高階項截斷誤差,導致濾波誤差增大甚至發(fā)散。
最近Arasaratnam和Haykin提出了一種容積卡爾曼濾波[6-7](Cubature Kalman Filter,CKF),其核心是基于spherical-radial cubature準則,計算出一組等權(quán)值的容積點,直接通過非線性系統(tǒng)方程傳播這些點來進行狀態(tài)估計。為了避免復雜的矩陣求逆和分解運算,兩位學者提出了濾波精度和穩(wěn)定性更高的平方根容積卡爾曼濾波[8](Square-root Cubature Kalman Filter,SCKF)算法。而上述算法的優(yōu)越性,在文獻[9-11]的仿真中已經(jīng)得到驗證。但當系統(tǒng)的狀態(tài)方程或量測方程是線性時,采用上述方法會增大計算量,因此可通過對線性模型部分的一步預測采用卡爾曼濾波,非線性模型部分采用容積濾波對其進行簡化[12]。
本文根據(jù)組合導航系統(tǒng)的特點,針對一般組合系統(tǒng)狀態(tài)維數(shù)高、變量多,導致濾波實時性差的問題,提出了將一種新的簡化SCKF算法應用到模型中,并通過仿真與SCKF算法和EKF進行了比較。結(jié)果表明,簡化的算法在保證了組合濾波精度的同時,有效降低了系統(tǒng)運算量。
1 平方根容積卡爾曼濾波
考慮如下的非線性系統(tǒng)
xk=Φk,k-1xk-1+Γk-1wk-1
(1)
zk=h(xk)+vk
(2)
式中,Φk,k-1∈Rn×n為線性狀態(tài)轉(zhuǎn)移矩陣;h(·)為非線性量測函數(shù);系統(tǒng)狀態(tài)向量xk∈Rn;量測向量zk∈Rm;wk-1,vk為互不相關(guān)的高斯白噪聲,其方差分別為Qk-1,Rk。
計算步驟如下:
1)初始化
給定均值和協(xié)方差:
(3)
計算求容積點和權(quán)值,即
(4)
式中,[1]=[I,-I],I為n維單位方陣,[1]為n×2n維矩陣,[1]j表示取[1]第j列。
2)時間更新
Sk-1=chol(Pk-1)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
3)量測更新
(12)
Zj,k=h(Xj,k)
(13)
(14)
Szz,k=qr([γkSR,k])
(15)
(16)
(17)
(18)
(19)
(20)
(21)
2 簡化的平方根容積卡爾曼濾波
考慮到系統(tǒng)的狀態(tài)方程為線性,量測方程為非線性,在時間更新環(huán)節(jié)使用線性的卡爾曼濾波進行簡化,在量測更新過程使用平方根求容積卡爾曼濾波。
簡化算法表示如下:
1)時間更新
(22)
(23)
(24)
2)量測更新
計算式(12)~(21),然后計算
(25)
3 算法復雜度分析
相比于SCKF算法,RSCKF算法是在時間更新過程用狀態(tài)轉(zhuǎn)移矩陣求取狀態(tài)一步預測和預測協(xié)方差矩陣,而二者的算法步驟在量測更新過程基本一致,所以下面主要對時間更新過程進行定性和定量分析。
首先定性分析SCKF算法時間更新過程,觀察式(5)~(11),在前一時刻的狀態(tài)估計和協(xié)方差陣的平方根陣已知的情況下,首先計算求容積點,然后再計算傳播后的求容積點,再根據(jù)權(quán)值計算狀態(tài)預測值,而對預測協(xié)方差陣平方根的求取不僅要用到矩陣分解,而且牽扯到矩陣γk的計算,運算時間與狀態(tài)維數(shù)緊密相關(guān),大大增加了計算量。然而觀察式(22)~(23),相比于SCKF算法,簡化算法避免了計算求積點和矩陣γk,直接用狀態(tài)轉(zhuǎn)移矩陣來計算一步預測值,減小了運算成本。
下面對時間更新過程進行定量分析,假設矩陣乘積、加減、分解運算時間分別為m1,m2,m3,且狀態(tài)為n維,則SCKF算法的運算時間可表示為:
TSCKF=n(2m1+5m2+2m3)
(26)
同理可得:
TRSCKF=3m1+m2+m3
(27)
上面的運算均不考慮矩陣轉(zhuǎn)置及分解運算后取非零方陣時間。通過對比發(fā)現(xiàn),簡化算法的運算時間遠小于SCKF算法。
最后將2種算法用在仿真環(huán)境為:LenovoM4360i3-3.4GHzCPU,2G內(nèi)存,MatlabR2009a32位版本的計算機,得到一次SCKF的濾波時間為0.01315s,一次RSCKF的濾波時間為0.006318s。通過比較可知,簡化算法的時間消耗減少了50%。
4 INS/GPS緊組合系統(tǒng)非線性模型
4.1 系統(tǒng)狀態(tài)方程線性模型
組合導航誤差狀態(tài)方程如下:

(28)
式中,X(t)是17×1維誤差狀態(tài)向量,W(t)為系統(tǒng)噪聲,G(t)為噪聲分配陣,X(t)表示為
X(t)=[φEφNφUδvEδvNδvUδLδλ
δhεxεyεz▽x▽y▽zδtuδtru]T
其中,各狀態(tài)量依次為東、北、天向的姿態(tài)誤差、速度誤差、位置誤差、陀螺常值漂移和加計零偏;δtu是與時鐘誤差等效的距離誤差,δtru是與時鐘頻率誤差等效的距離誤差。
4.2 系統(tǒng)量測方程非線性模型

(29)
式中,V(t)為量測噪聲。
5 仿真實驗及分析
標準EKF、平方根CKF和簡化平方根CKF計算得到的定位誤差如圖2~4及表1所示。可以看到,在300~2000s時間段內(nèi),采用標準EKF得到的水平位置誤差在[-11.3m,+12.1m],高度誤差在[-9.7m,+8.6m]內(nèi)。CKF得到的定位精度比標準EKF有明顯提高,為:水平位置誤差在[-7.8m,+7.3m],高度誤差在[-6.0m,+7.2m]內(nèi)。簡化平方根CKF相對平方根CKF算法在時間更新環(huán)節(jié)進行了簡化,減小了計算量,但定位精度相當,水平位置誤差在[-7.4m,+7.1m],高度誤差在[-5.8m,+6.8m]。
圖1 飛行軌跡
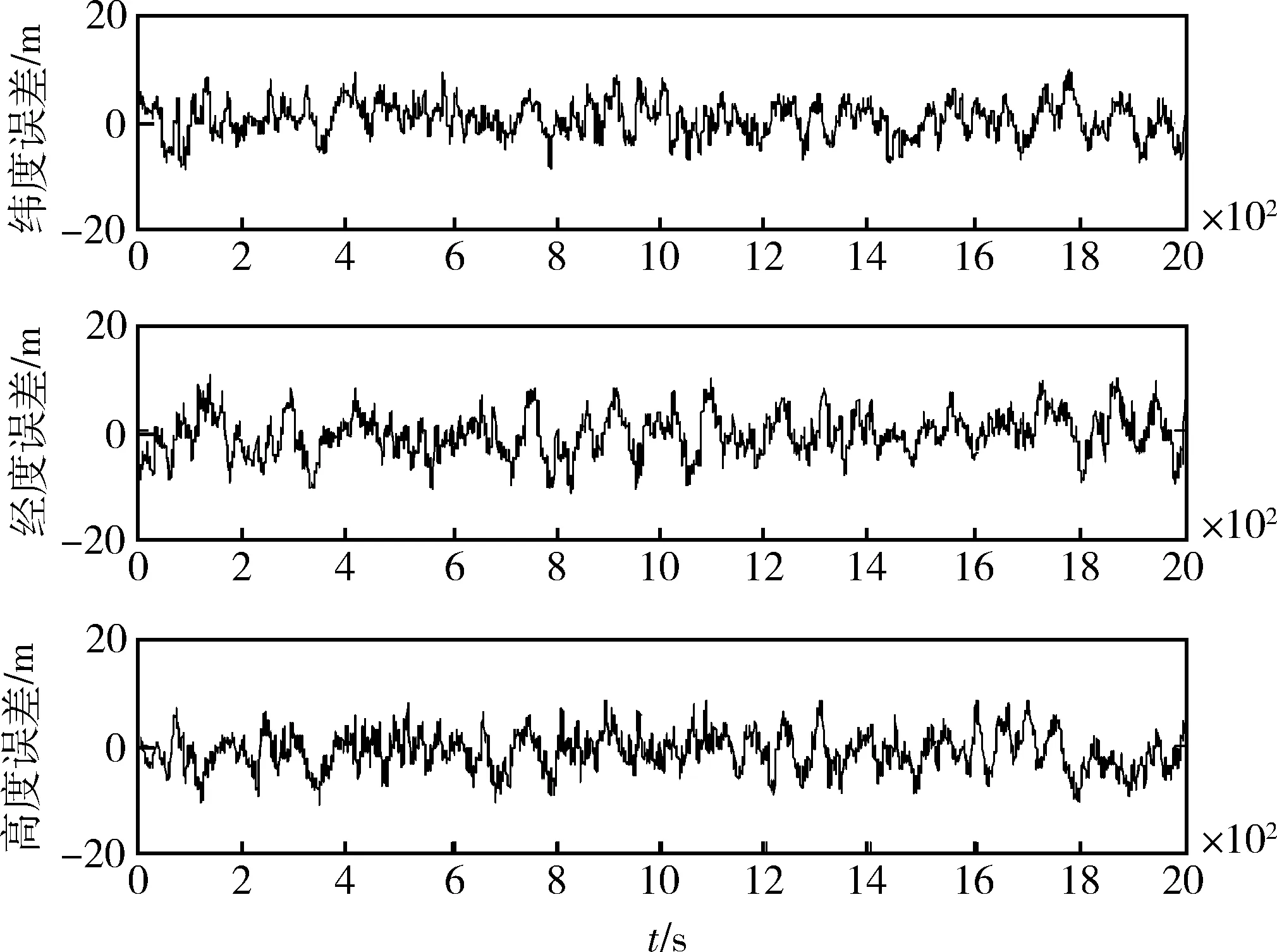
圖2 標準EKF定位誤差
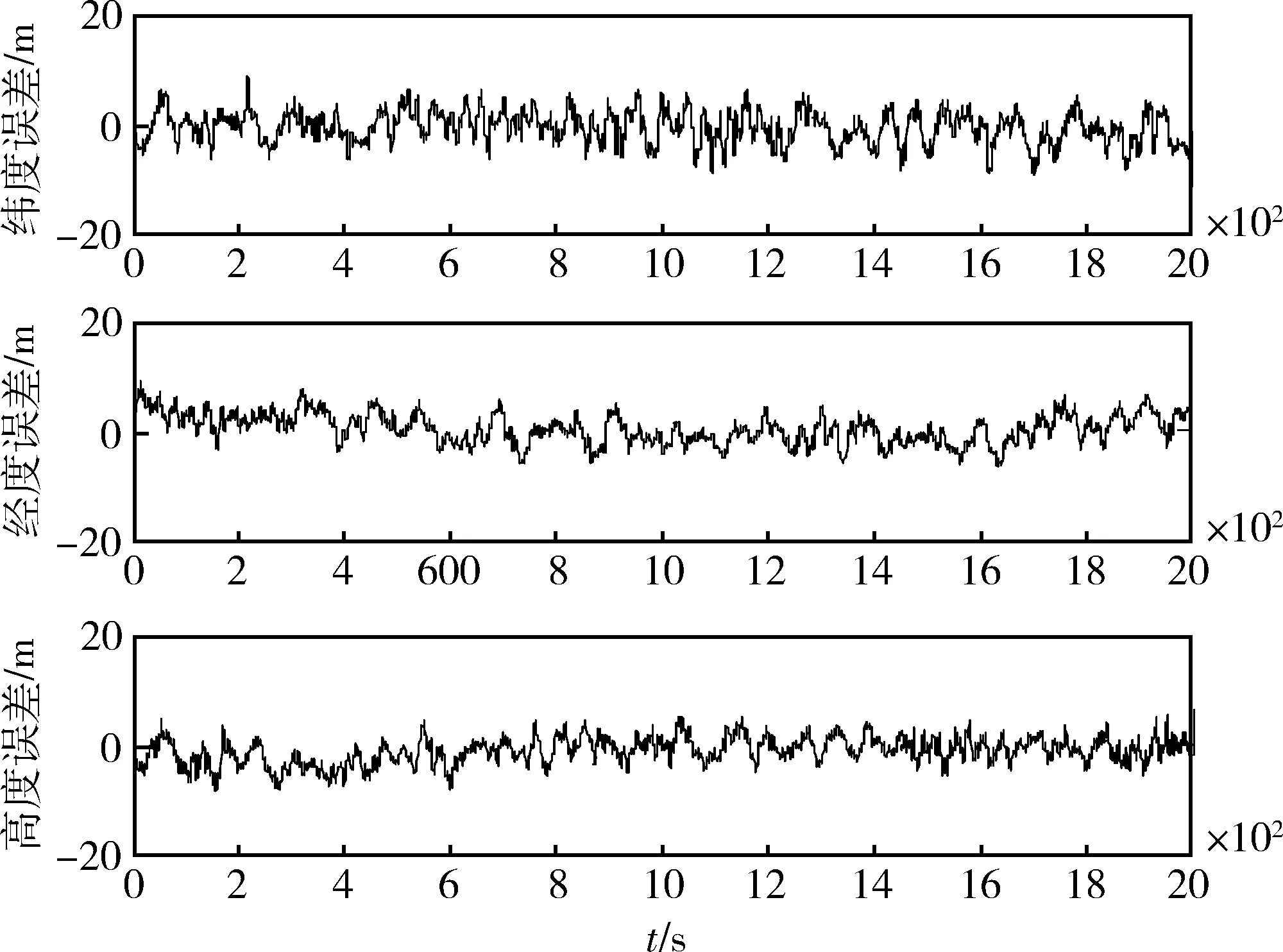
圖3 平方根CKF定位誤差
圖4 簡化平方根CKF定位誤差
表1 組合導航定位誤差比較
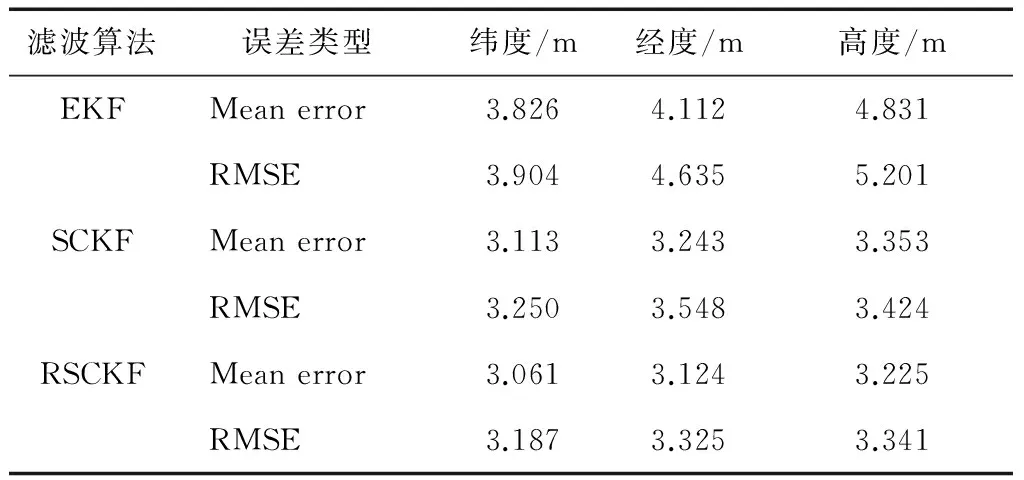
濾波算法誤差類型緯度/m經(jīng)度/m高度/mEKFMeanerror3.8264.1124.831RMSE3.9044.6355.201SCKFMeanerror3.1133.2433.353RMSE3.2503.5483.424RSCKFMeanerror3.0613.1243.225RMSE3.1873.3253.341
6 結(jié)論
為提高INS/GPS緊組合導航系統(tǒng)解算實時性,針對狀態(tài)方程為線性,量測方程為非線性的模型提出將RSCKF算法應用到系統(tǒng)中。簡化算法對SCKF算法的時間更新過程進行了簡化,簡化后的時間更新過程與線性卡爾曼濾波算法的時間更新過程一致。計算復雜度分析和仿真分析表明,簡化算法的運算量和一次運算時間要明顯低于SCKF算法。將簡化算法與EKF,SCKF算法進行對比,結(jié)果表明,SCKF算法精度要明顯高于EKF,這是由于EKF算法在處理非線性模型時采用線性化,摒棄了高階項,降低了濾波精度;RSCKF算法與SCKF相比,估計精度相當,但在算法實時性方面,RSCKF算法大大減少了計算量,使得一次濾波的時間消耗減少了50%,提高了導航解算的實時性。
[1] 劉建業(yè),曾慶化,趙偉,等.導航系統(tǒng)理論與應用[M].西安:西北工業(yè)大學出版社,2010.(Liu Jianye, Zeng Qinghua, Zhao Wei, et al. Flying Control System [M]. Xi’an: Press of Northwestern Polytechnical University, 2010.)
[2] ALI J, MIRZA MRUB. Performance comparision among some nonlinear filters for a low cost SINS/GPS integrated solution [J]. Nonlinear Dynamics, 2010, 61(3):491-502.
[3] 程向紅,王曉飛,劉峰麗.稀疏網(wǎng)格求積分濾波算法在SINS/GPS緊組合導航中的應用[J].中國慣性技術(shù)學報, 2014, 22(6): 799-804.(Cheng Xianghong, Wang Xiaofei, Liu Fengli. Application of Sparsegrid Quadrature Filter to Tightly-coupled SINS/GPS Integrated Navigation System [J]. Journal of Chinese Inertial Technology, 2014, 22 (6): 799-804.)
[4] LIM Jaechan, HONG Daehyoung. Gaussian Particle Filtering Approach for Carrier Frequency Offset Estimation in OFDM System [J]. IEEE Signal Processing Letters, 2013, 20(4): 367-370.
[5] De MARINA H G, PEREDA F J, GIRON-SIERRA J M. UAV Attitude Estimation Using Unscented Kalman Filter and TRIAD [J]. IEEE Trans. Ind. Electron. 2012, 59(11):4465-4474.
[6] Arasaratnam I, Haykin S. Cubature Kalman Filter [J]. IEEE Trans on Automatic Control, 2009, 54(6): 1254-1269.
[7] ZHANG X C,GUO C J. Cubature Kalman Filter: Derivation and extension [J]. Chinese Physics B, 2013, 22(12): 501-506.
[8] 張鑫春,郭承軍.均方根嵌入式容積卡爾曼濾波[J].控制理論與應用,2013, 30(9): 1116-1121.(Zhang Xinchun, Guo Chengjun. Square-root Imbedded Cubature Kalman Filtering[J]. Control Theory & Applications, 2013, 30(9): 1116-1121.)
[9] 孫楓,唐李軍.基于Cubature Kalman Filter的INS/GPS組合導航濾波算法[J].控制與決策, 2012, 27(7): 1032-1036.(Sun Feng, Tang Lijun. INS/GPS Integrated Navigation Filter Algorithm Based on Cubature Kalman Filter [J]. Control and Decision, 2012, 27(7): 1032-1036.)
[10] Dai H D, Dai S W, Cong Y C, et al. Performance Comparision of EKF/UKF/CKF for the Tracking of Ballistic Target [J]. Telkomnika Indonesian J of Electrical Engineering, 2012,10(7):1692-1699.
[12] Mohammed D, Abdelkrim M, Mokhtar K, Abdelziz O. Reduced Cubature Kalman filtering applied to target tracking[C]// The 2nd International Conference Control, Instrumentation and Automation(ICCIA), Shiraz: IEEE, 2011: 1097-1101.
[13] 于永軍,徐錦法,熊智.高斯粒子濾波的慣性/GPS緊組合算法[J].哈爾濱工業(yè)大學學報, 2015, 47(5): 81-85.(Yu Yongjun, Xu Jinfa, Xiong Zhi. SINS/GPS Tightly Integrated Algorithm with Gaussian Particle Filter [J]. Journal of Harbin Institute of Technology, 2015, 47(5): 81-85.)
INS/GPS Tightly Integrated Algorithm Based on Reduced Square-Root Cubature Kalman Filter
Shen Fei, Hao Shunyi, Wu Xunzhong, Guo Chuang, Yang Bin
Aeronautics and Astronautics Engineering College, Air Force Engineering University, Xi’an 710038,China
Byfocusingontheproblemoftherealtimeofnonlinearmodelcalculation,thereducedsquarerootcubatureKalmanfilter(RSCKF)isproposedtouseforimprovingtheoperatingrateofINS/GPStightlyintegratednavigationsystem.ThisreducedarithmeticsimplifiesthesquarerootcubatureKalmanfilter(SCKF)intimeupdatestep,andthestate-transitionmatrixisdirectlyusedforcalculatingtheone-steppredictionmatrixofstateandcovariancebyavoidingthecomplexapproximatecalculationprocessofcalculatingcubature.Duringthesimulationexperiments,theRSCKFresultsarecomparedwithSCKFandEKFresultsandshowthattheRSCKFandSCKFperformwellthanEKF.TheRSCKFalgorithmperformsnearlythesameastheSCKFbyprecisionandcaneffectivelyreducetheamountofcalculation.
INS/GPSintegratednavigation;Tightlycoupling;RSCKF;Nonlinearmodel
*國家973計劃資助(6132180403-1)
2015-09-21
沈 飛 (1992-),男,沈陽人,碩士研究生,主要研究方向為組合導航與多源信息融合;郝順義 (1973-),男,山西臨猗人,博士,副教授,主要研究方向為慣性導航與組合導航;吳訓忠(1969-),男,湖北襄陽人,博士,教授,主要研究方向?qū)Ш健⒅茖c控制;郭 創(chuàng)(1978-),男,湖南益陽人,博士,副教授,主要研究方向為導航、制導與控制;楊 彬 (1990-),男,山東濰坊人,碩士研究生,主要研究方向為慣性導航與組合導航。
V249.3
A
1006-3242(2016)01-0015-05