反作用輪摩擦力矩建模及過零時補償方法研究*
2016-08-10 10:36:17劉國華尹增山姚小松
航天控制 2016年1期
劉國華 尹增山 王 龍 姚小松 劉 琦
上海微小衛星工程中心,上海 201203
?
反作用輪摩擦力矩建模及過零時補償方法研究*
劉國華 尹增山 王 龍 姚小松 劉 琦
上海微小衛星工程中心,上海 201203

針對碳監測衛星中使用的反作用輪的摩擦力矩特性進行了分析。采用反作用輪電機力矩的時間序列信號為分析對象,引入Dahl理論模型為依據,提出了常偏信號和振顫信號相結合的摩擦力矩補償方法,并對信號的取值進行了研究。其中,常偏信號的取值以反作用輪力矩常值輸出的統計特性為依據,振顫信號以轉速頻譜特性為依據。仿真實驗結果表明,該方法可以有效地提高摩擦力矩補償效果。 關鍵詞 反作用輪;時間序列信號;摩擦力矩補償;振顫信號;
碳監測衛星是針對全球氣候變化這一當今國際社會普遍關心的重大全球性問題,以大氣二氧化碳(CO2)遙感監測為切入點,研制并發射以高光譜CO2探測儀、多通道云與氣溶膠探測儀為主要載荷的全球CO2監測科學實驗衛星,建立地面數據接收、處理與驗證系統,提升我國大氣遙感科學探測系統整體水平,為開展全球氣候變化研究提供依據。為了獲取CO2濃度監測數據,衛星應分別獲得針對天底、太陽耀斑及目標(熱點地區、地面站)的探測數據,因此要求衛星姿軌控分系統需完成衛星總體提出的相應的任務模式,在保證通信、能源、熱控等分系統需求的基礎上,實現高可靠、高精度、高穩定度的姿態指向性能。
根據衛星任務需求,碳衛星選取反作用輪組作為姿態控制系統執行機構,實現整星零動量。但反作用輪系統產生的擾動是航天器上最主要的擾動源之一。其在軌工作時會誘發衛星低量級的擾振,這種低量級的振動有可能影響衛星有效載荷,如遙感相機的成像質量,而測量并分析動量輪系統產生的擾動有助于提高航天器姿態控制的精度[1]。由于微振動屬于典型的力學交叉學科問題,其響應分析研究極具創新性和挑戰性,目前仍是國內外研究的熱點問題之一[2]。
目前針對反作用輪擾動的研究集中于對擾動源的分析和補償2個方面。文獻[3]對航天器的在軌擾動源進行了總結,認為反作用飛輪的在軌運行熱振動的影響最大。文獻[4]分析了反作用輪擾動特性與輪速和軸承特性的關系。國內在這方面也做了大量研究,文獻[5-6]對擾動來源、測試方法進行了分析。文獻[7]根據飛輪的物理特性推導了擾動解析模型。針對反作用輪擾動的補償問題,當前的研究熱點以隔振和控制算法補償為主。隔振裝置主要有被動、半主動和主動隔振3種,由于隔振裝置重量和體積較大,對于小衛星的應用限制較大。對于控制算法補償以自適應算法為主,文獻[8]采用了狀態觀測器對擾動特性進行補償。文獻[9]提出了一種考慮機械飛輪干擾補償的自適應滑模變結構控制器,其中通過設計狀態觀測器得到機械飛輪摩擦干擾的估計值實現對其補償。文獻[10]對擾動進行了自適應補償,對執行器安裝偏差與干擾具有較好的補償控制能力。但對于自適應的方法,一旦狀態方程的準確性和實時性不足,將會對補償效果帶來極大影響。
基于以上分析,本文在過零時摩擦力矩理論模型的基礎上,以碳衛星實際使用的反作用輪力矩的時間序列數據的統計特性為依據,通過峰峰值和方差評估,實現了對反作用輪摩擦力矩模型更好的擬合;同時提出了常值補償和振顫信號相結合的補償措施,該方法避免了自適應估計采用的狀態方程的準確性和實時性不足對補償效果的影響,對保障衛星的控制精度和在軌實時性具有實際應用和理論價值。
1 反作用輪擾動特性模型
1.1 理論描述
摩擦力矩是高精度飛輪控制系統的主要干擾。摩擦力矩對飛輪控制的影響是多方面的[11]:
1)當飛輪由零轉速啟動時,由于靜摩擦的可變性,飛輪會表現出彈簧現象。靜摩擦的可變性是指隨著接觸面之間相對靜止時間的變化,靜摩擦力的大小也發生變化,滑動前的相對靜止時間越長,靜摩擦力越大;
2)低速時,由于摩擦的遲滯效應,系統會有極限環震蕩和爬行現象。摩擦的遲滯效應是指從速度發生變化到摩擦力的變化之間存在著時間上的滯后;
3)當反作用飛輪轉速過零時,摩擦力矩在零轉速前后改變方向,而此時控制系統很難在較短的控制周期內對這種突變的強干擾做出反應;
4)飛輪在正常工作轉速內,由于摩擦干擾力矩的非線性和時變,以及飛輪控制器指令輸出很難準確的復現指令,使飛輪系統精度下降。
摩擦力矩的動態特性復雜且具有不確定性,與接觸表面特性、表面粗糙度、軸承溫度、停留時間和電機轉速等均有關。摩擦力學和潤滑理論的研究表明,在油膜潤滑滾珠軸承支持的反作用飛輪系統中,摩擦力矩根據轉速(或根據接觸表面的潤滑條件)可分為3個區(如圖1所示):
Ⅰ靜摩擦區;
Ⅱ邊界半潤滑區(Stribeck 效應區);
Ⅲ 全潤滑區。
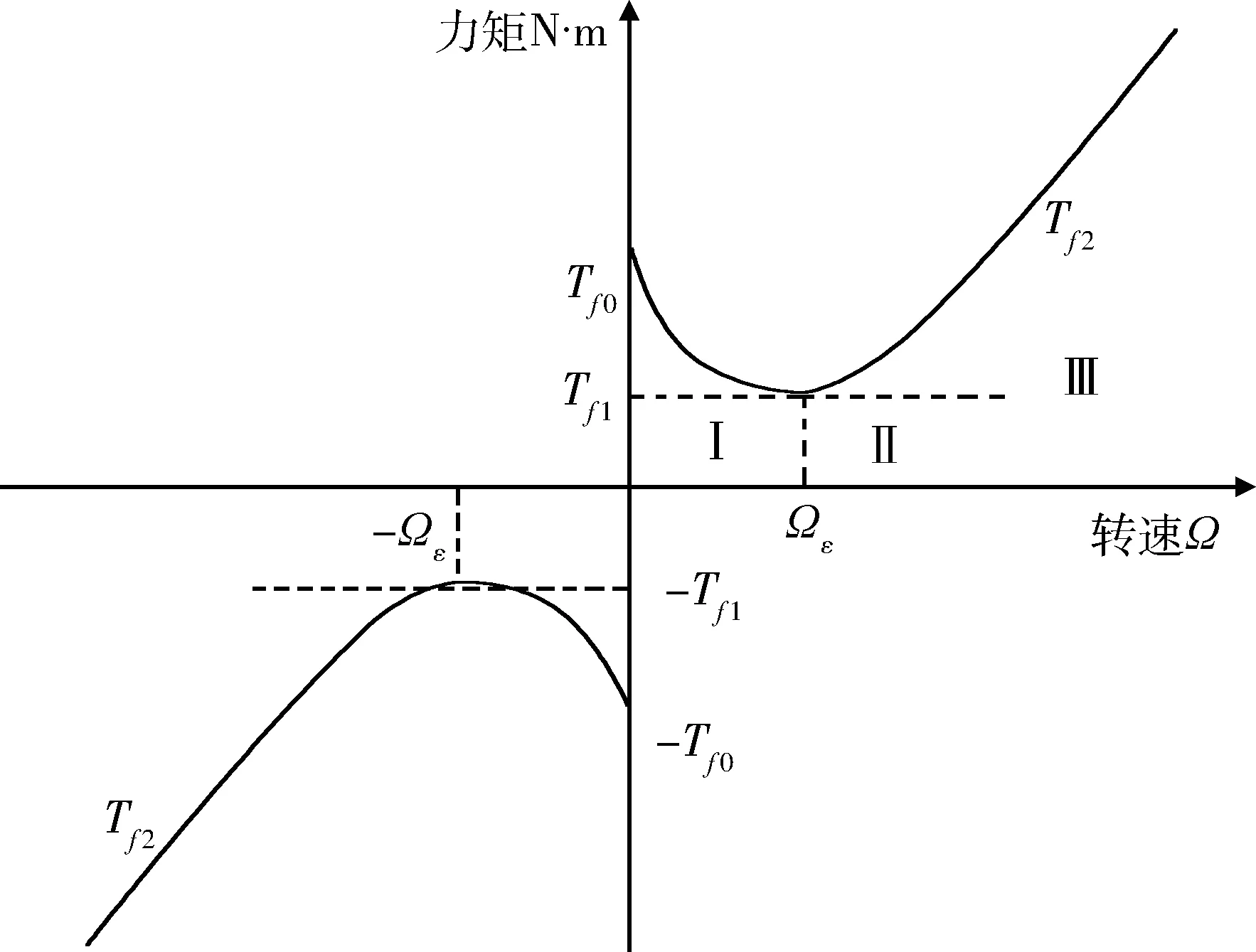
圖1 飛輪轉速與摩擦力矩關系
圖1中Tf 0為靜摩擦力矩;Tf 1為庫侖摩擦力矩。I區為靜摩擦區(由于此區飛輪轉速低,粘性摩擦力矩可忽略);Ⅱ區為庫侖摩擦區,將Ⅰ區和Ⅱ區合稱為干摩擦;Ⅲ區為粘性摩擦。經驗表明,在Ⅰ區,飛輪的摩擦力矩是以指數規律從最大靜摩擦力矩逐漸衰減到庫侖摩擦力矩,當其轉速超過某一轉速Ωε時,由于粘性摩擦力矩占據了主導地位,使得飛輪的摩擦力矩隨轉速迅速近似線性的增加。
反作用飛輪受驅動電機電磁力矩及軸承摩擦力矩之合力矩的支配,反作用輪對衛星本體的控制力矩是該合力矩的反作用力矩。它們之間的關系如下:
To=Te+Tf
(1)
其中,To為衛星受到的實際控制力矩,Te為電磁驅動力矩,Tf為軸承摩擦力矩。反作用飛輪在零轉速左右工作時,低速摩擦特性形成的穩定平衡點將產生吸引作用,捕獲反作用飛輪的轉動,使之趨向靜止。當轉速過零時,由于摩擦力矩相對控制力矩較大,會使衛星姿態暫時失控,導致衛星姿態偏差加大。直到控制力矩大于摩擦力矩,掙脫平衡點的吸引作用,衛星才得以控制。這一干擾對反作用飛輪在低速時是一種內干擾,表現為低頻干擾,對衛星總體運動狀態不構成影響,僅消耗一部分轉子的驅動力矩,使轉子轉速的規律發生變化,導致飛輪的角動量變化規律發生改變,系統的控制力矩發生變化,因而影響控制系統性能。
針對低轉速的靜摩擦特性,Dahl推導并證明了2個剛體間的固體摩擦數學模型如圖2所示[12]。
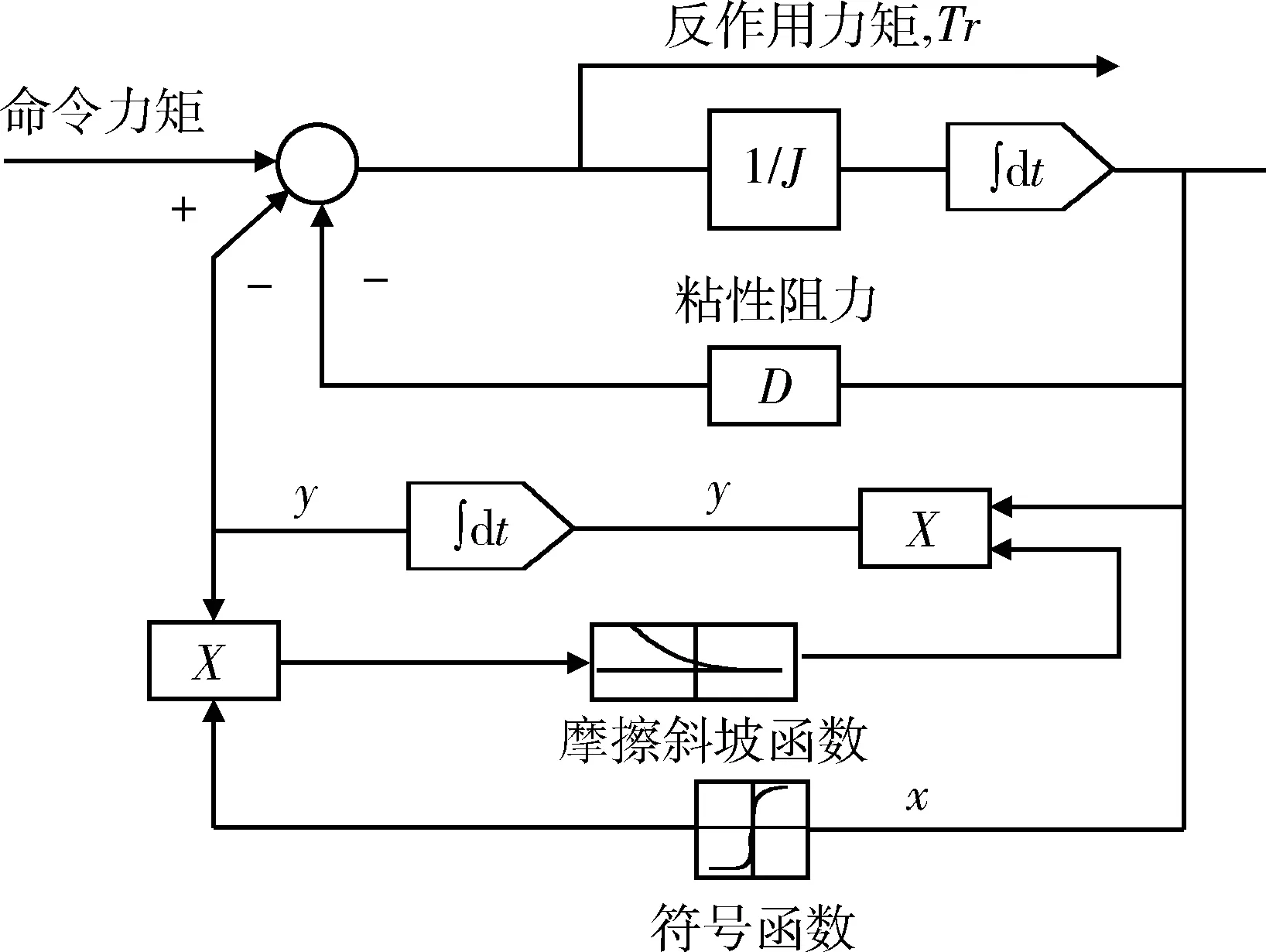
圖2 飛輪低速摩擦力矩數學模型
根據圖2,其動力學方程如下所示:
(2)
式中,sign為符號函數,Tf為動摩擦,TC為期望控制力矩,Tf0為靜摩擦。
1.2 反作用輪模型設計
碳衛星采用的TELDIX公司的產品RSI15型飛輪,其性能指標如表1。
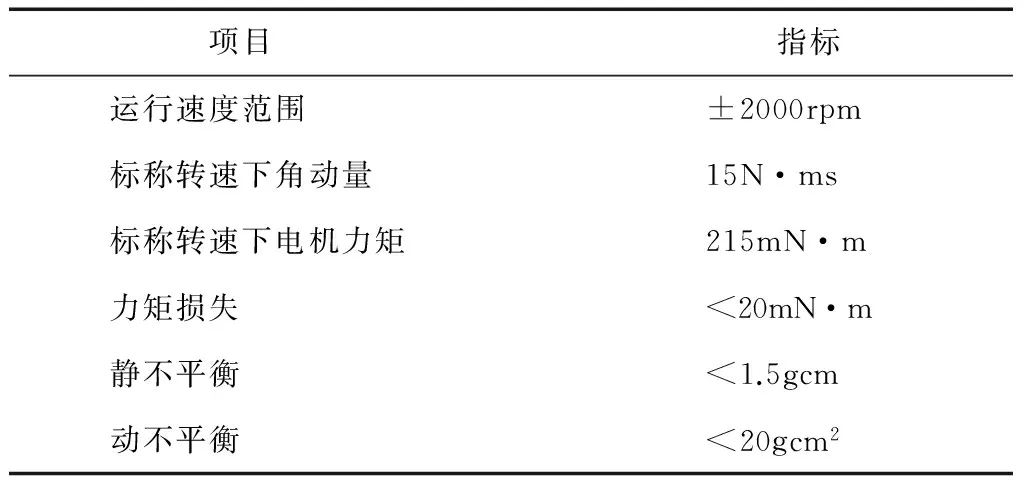
表1 RSI15飛輪的性能指標
以反作用輪力矩的時間序列數據的統計特性為依據,進行反作用輪力矩峰峰值模式擬合。反作用輪峰峰值定義為電機在不同的位置時產生的力矩變化量。其峰峰值和方差的計算方法如下:
MTpeak=1.0
(3)
(4)
MT(θ)=max(MTi(θ,0),MTi(θ,1),MTi(θ,2))
(5)
(6)
峰峰值:
(7)
方差:
(8)
根據以上計算公式,RSI15的力矩峰峰值為14%,方差為15%。
通過Matlab進行仿真。當轉速絕對值為0~20rpm時,固體摩擦力矩是輪速大小、輪速方向、實驗測定的摩擦斜坡信號的一個函數:
(9)
其中,0 ≤α≤1是一個平滑參數,根據實測信息,α取為0.0512。
當轉速絕對值為20~300rpm時,摩擦力矩與輪速大小、輪速方向相關:
Tf=a0+a1×sin(x×w0)+a2×cos(x×w0)+
a3×sin(2×x×w0)+a4×cos(2×x×w0)
(10)
式中,a為實驗測定的系數,x為轉速,w0與電機轉角有關,最低諧波是1倍轉速,模型設計中考慮了2次諧波。
根據以上設計模擬的摩擦力矩模型如圖3所示。
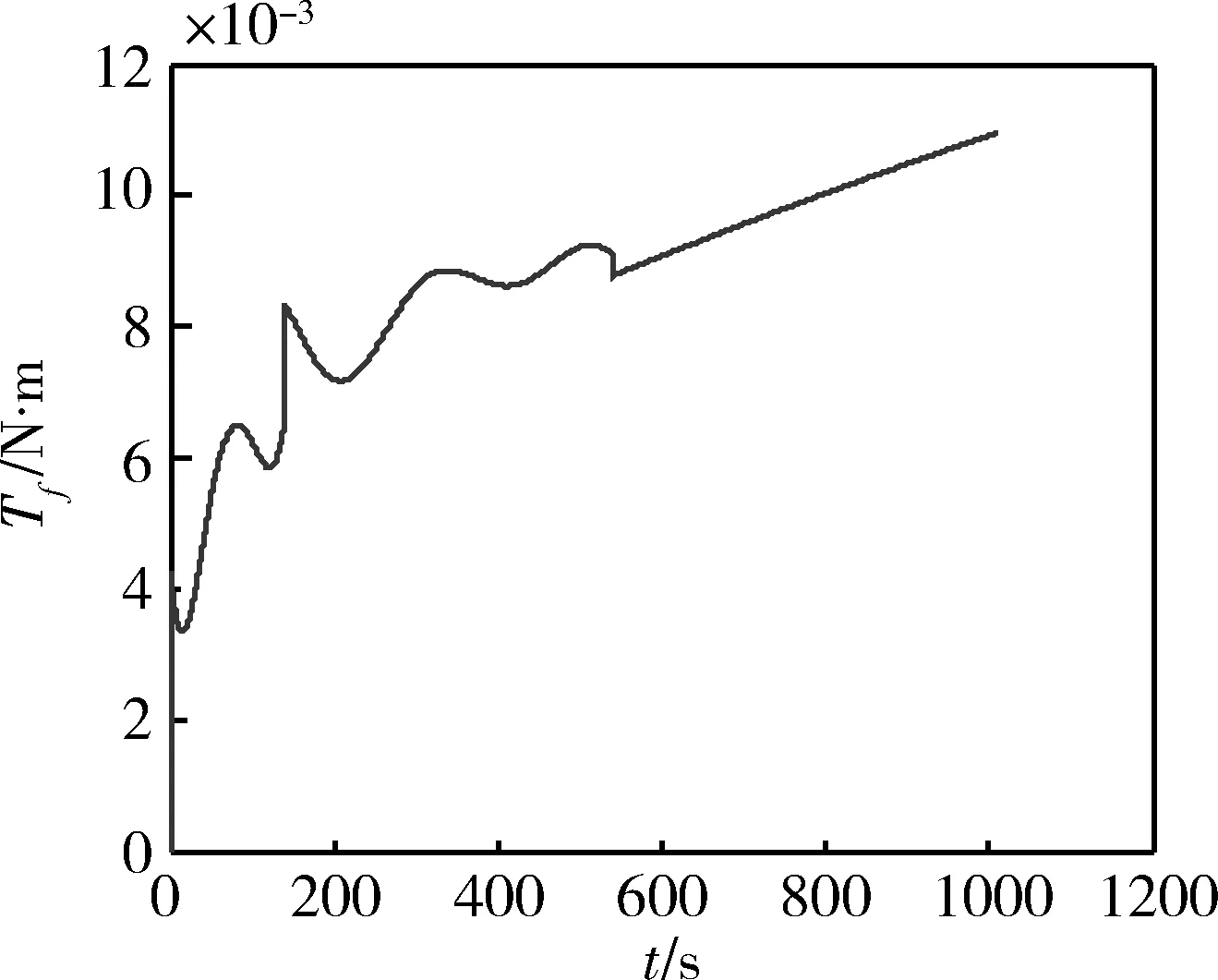
圖3 飛輪低速摩擦力矩
根據模型建模,同時對反作用輪模型和真實單機輸入1V的力矩,可以得到反作用輪輪速變化如圖4所示,輪速偏差如圖5所示。
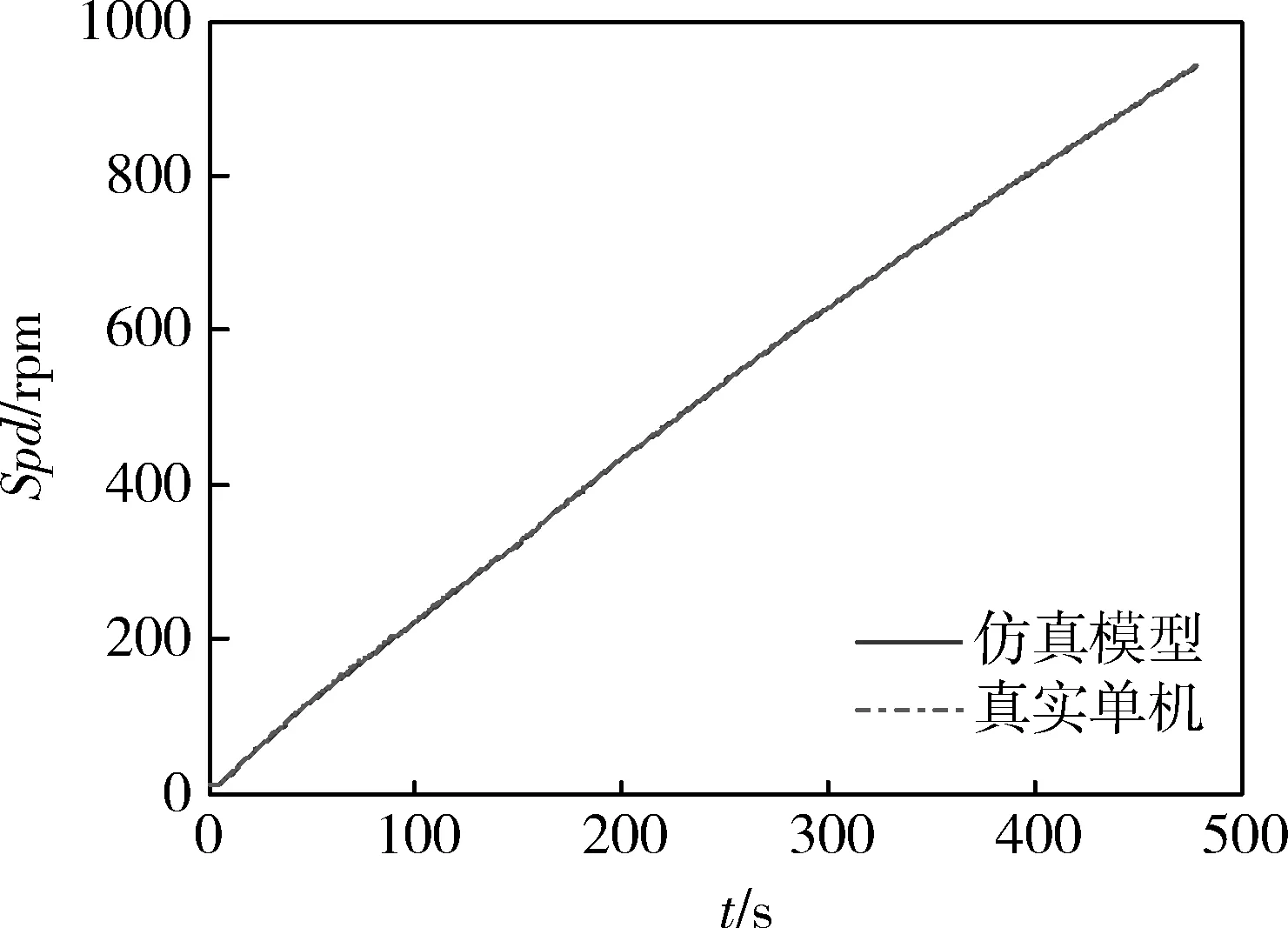
圖4 飛輪轉速增加曲線
由圖5可見,在低轉速階段(0~20rpm),誤差小于1.3rpm,符合峰峰值14%的理論計算結果。隨著轉速的增加,轉速誤差由6rpm減小為優于2rpm。
2 反作用輪摩擦力矩補償方法設計
當反作用輪轉速過零時,軸承的粘滯摩擦影響很小,此時對反作用輪力矩指令輸入和實際控制力矩的輸出起到主要影響作用的是滾動摩擦。為了彌補該摩擦力矩的影響,本文采用常值力矩補償結合無偏擬合的線性化微小力矩進行補償。常值補償項為了補償非零轉速下的庫侖摩擦力,另外增加了小的振顫信號,僅僅在低轉速下使用,以彌補突然轉向時變化的固體摩擦力矩。如果微弱信號的頻率高于輸入信號的頻率,則可以彌補小轉速的摩擦力矩。疊加振顫信號后的控制信號為[13]:
Tr(t)=Tc+C2f(γt)
(11)
則反作用輪速可積分得到:
(12)
為了克服靜摩擦中的符號函數信號和斜坡函數,采用高頻抖動信號進行靜摩擦補償。其補償部分f(·)以反作用輪實測數據為依據,可以為正弦信號、鋸齒信號和高斯信號。補償部分以反作用輪實測數據為依據。下面分別設計了多種高頻抖動信號進行靜摩擦補償。
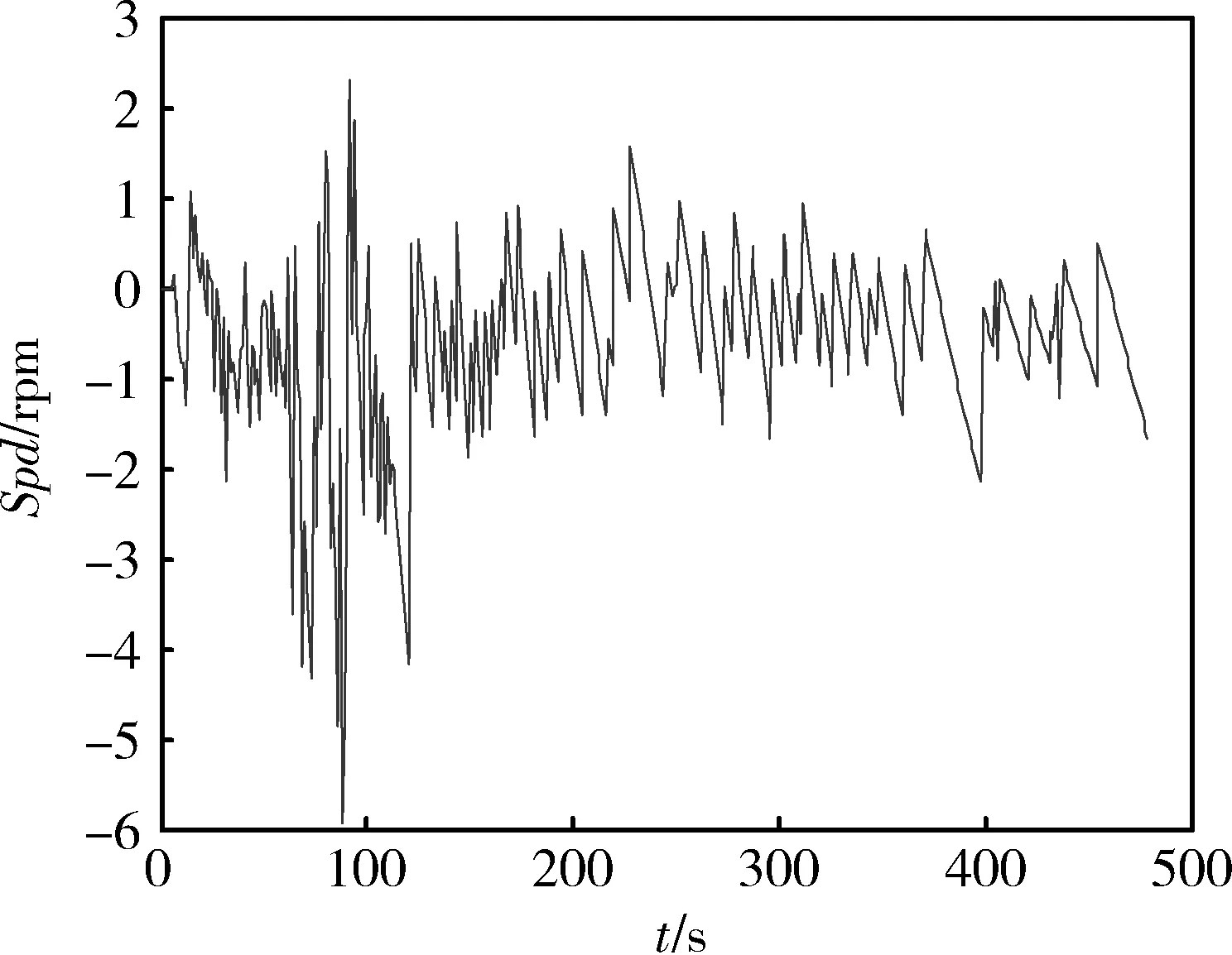
圖5 飛輪轉速誤差曲線
設計的正弦補償信號頻率從0.0398Hz到0.1,0.2,0.4,0.6,0.8,1.0,1.2,1.4,1.6,1.8,2.0,2.2,2.4,2.6,2.8,3.0,3.2,3.4,22Hz,補償增益為0.008N·m。基于正弦補償信號的幅值如圖6所示,基于正弦補償信號的飛輪輪速偏差如圖7所示。
設計的基于鋸齒波信號的補償頻率從0.0398Hz到0.1,0.2,0.4,0.6,0.8,1.0,1.2,1.4,1.6,1.8,2.0,2.2,2.4,2.6,2.8,3.0,3.2,3.4,22Hz,補償增益為0.008N·m。基于鋸齒補償信號的幅值如圖8所示。基于鋸齒補償信號的飛輪輪速偏差如圖9所示。
基于高斯信號的補償信號均值為0,1,2,3,4,方差取0.3162的1/5,2/5,3/5,4/5,5/5。采樣時間0.125s,仿真時間1s,補償增益為0.008N·m。基于高斯補償信號的幅值如圖10所示,基于高斯補償信號的飛輪輪速偏差如圖11所示。
圖6 正弦補償信號幅值
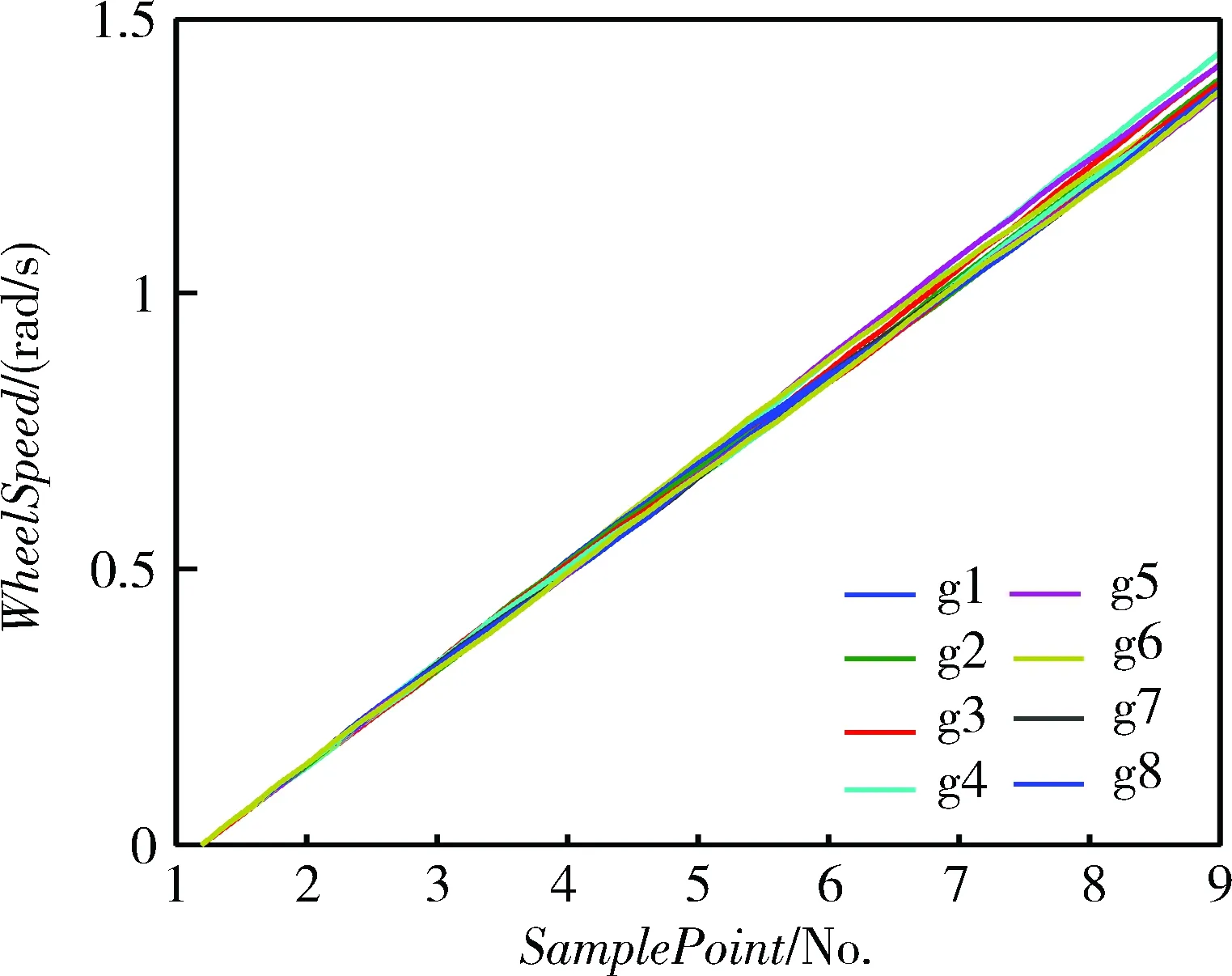
圖7 基于正弦補償的飛輪轉速偏差
根據圖7、圖9和圖11的結果,以轉速偏差為衡量標準,如表2所示。
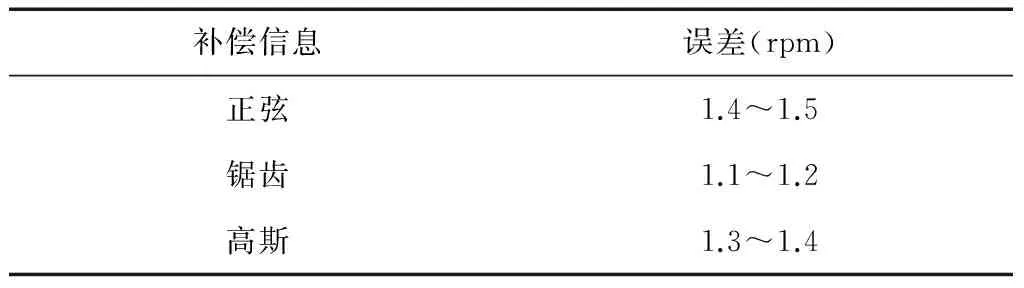
表2 補償信號性能指標
根據表2結果,靜摩擦的補償擬選取頻率在4Hz左右鋸齒波信號進行補償。
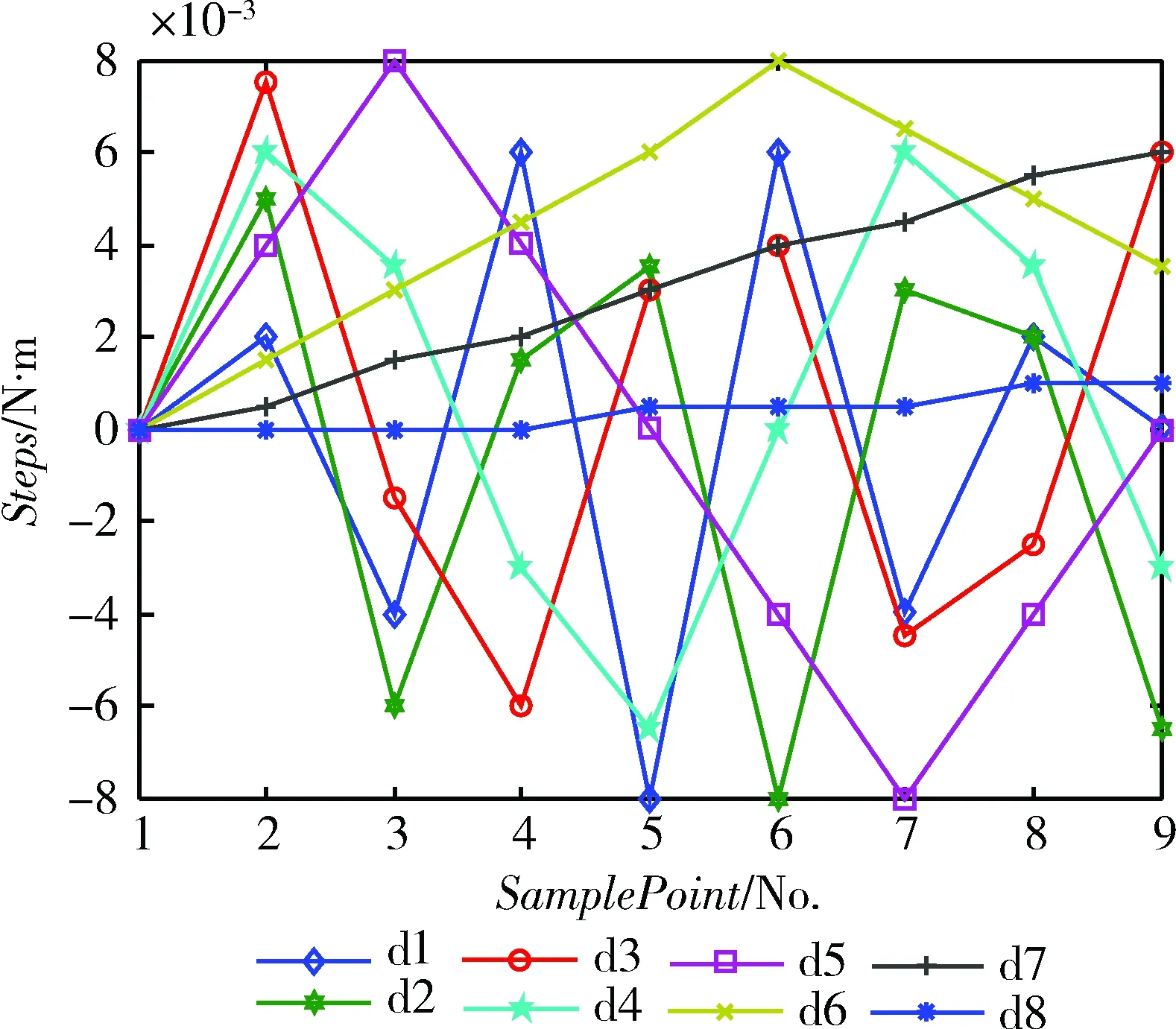
圖8 鋸齒波補償信號幅值
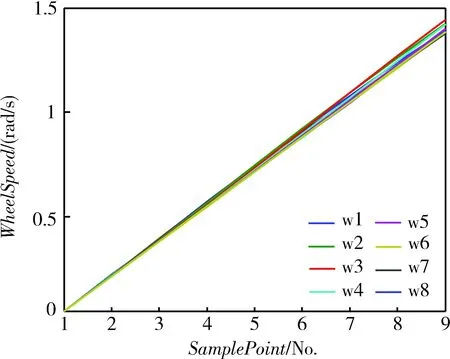
圖9 基于鋸齒波補償的飛輪轉速偏差
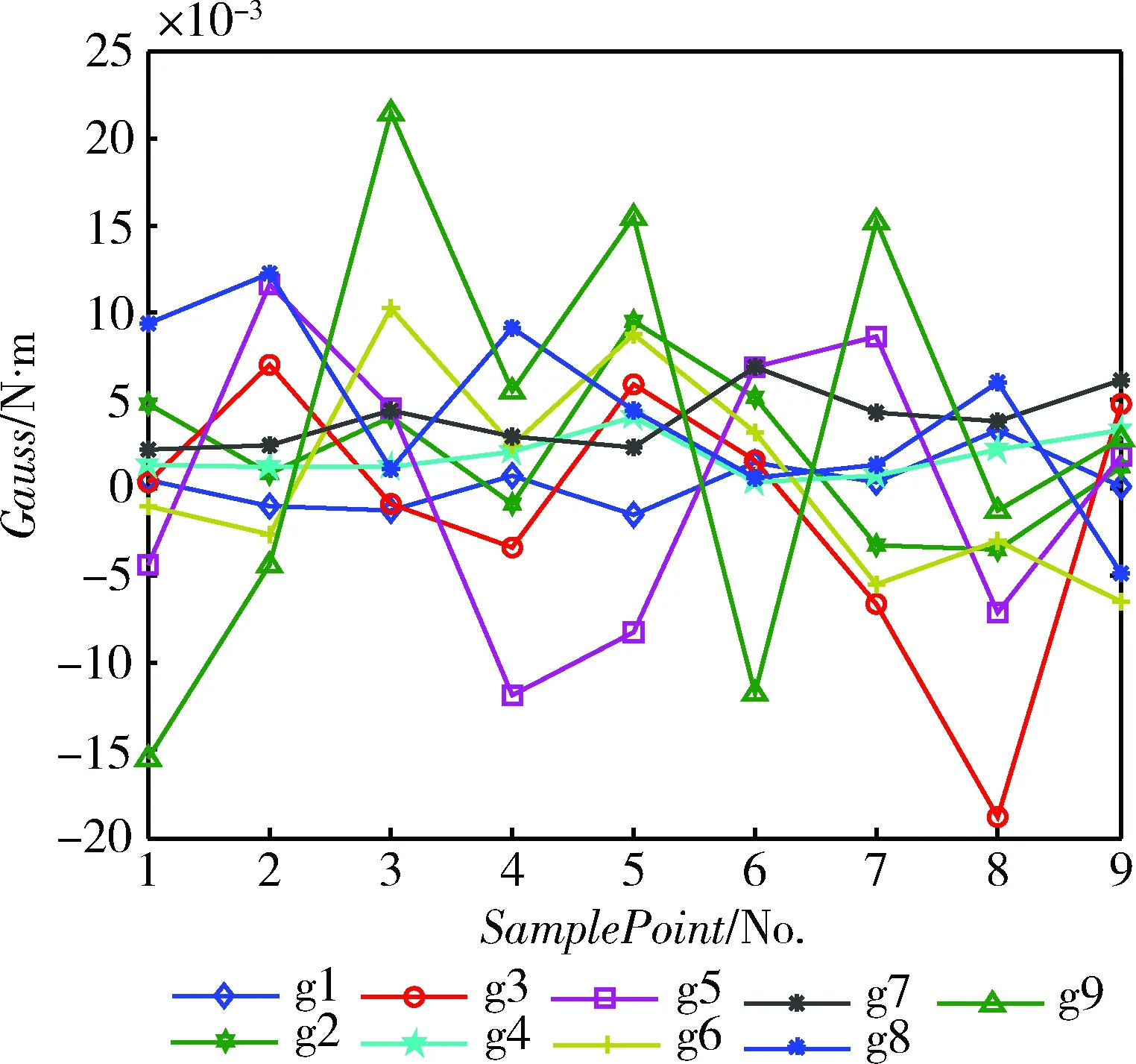
圖10 高斯補償信號幅值
3 算法仿真
仿真時采用碳衛星總體參數為:軌道類型為太陽同步軌道,軌道高度為700km,軌道傾角為99.12°,軌道周期為98min,降交點地方時為1∶30,衛星慣量:[330 210 420](kg·m2)。
仿真場景為反作用輪D故障后,僅用A,B,C三輪進行衛星穩態控制,三輪初始轉速為0,控制系統參數設計為:姿態機動角度回路控制參數,Kpx=11.78,Kpy=7.8,Kpz=15.63。姿態機動角速度回路控制參數,Kdx=93.7451,Kdy=62.0779,Kdz=124.4071。
下面進行衛星控制系統的閉環仿真分析。首先不補償靜摩擦干擾力矩,衛星三軸角度控制誤差和角速度誤差如圖12和13所示。
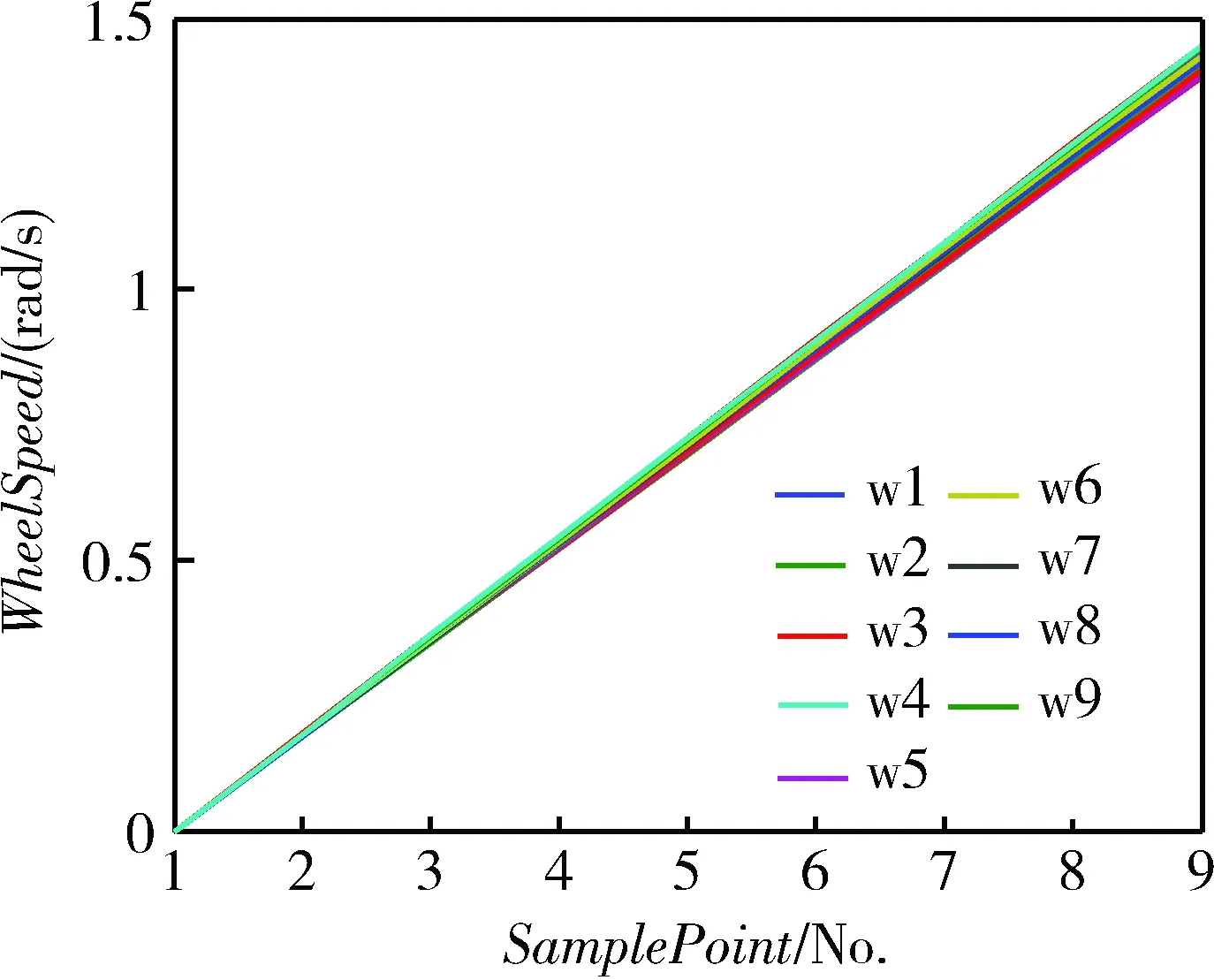
圖11 基于高斯補償的飛輪轉速偏差
圖12 三軸姿態角曲線
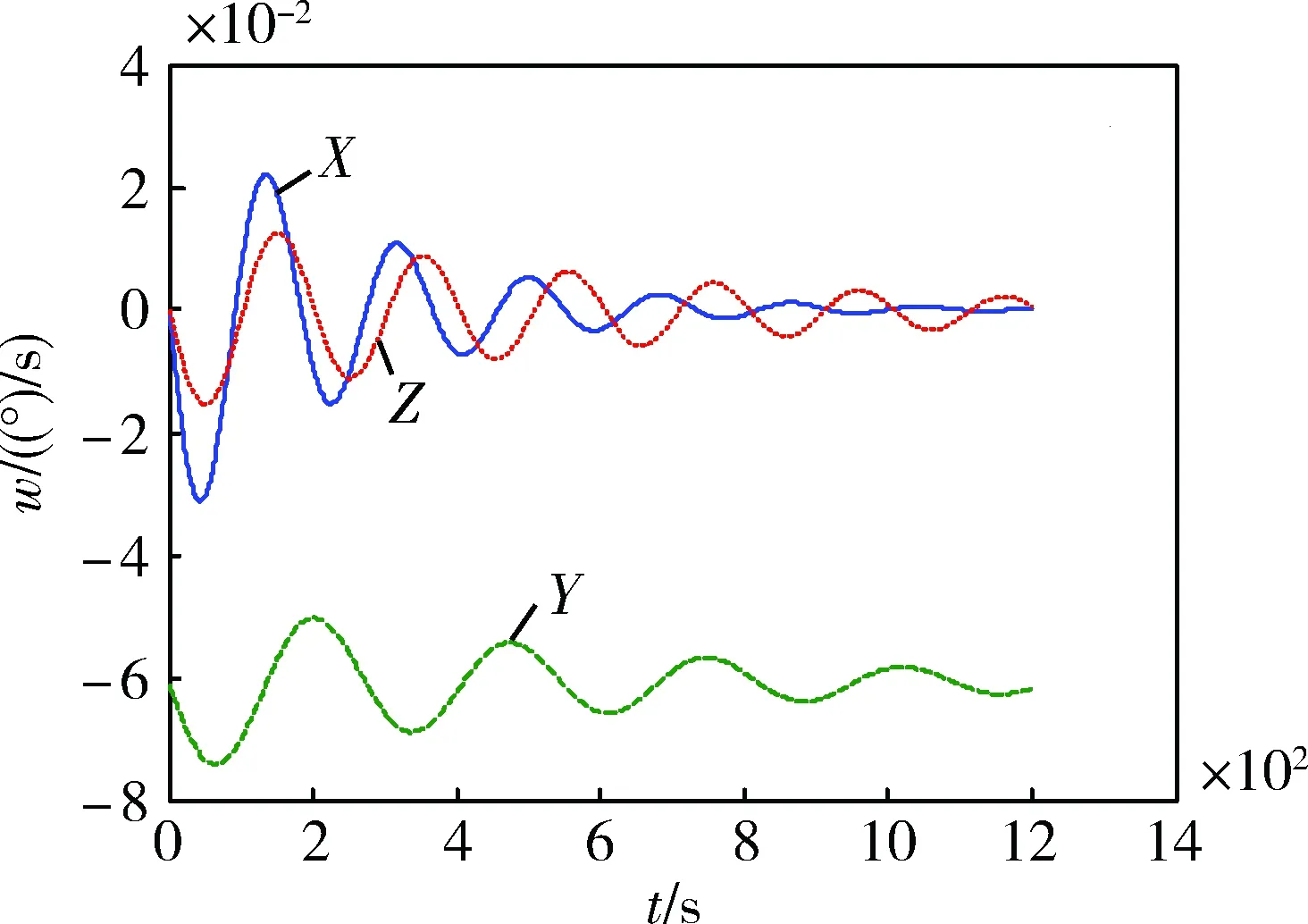
圖13 三軸姿態角速度曲線
由圖可見,三軸姿態角初始誤差約為0.45°,三軸角速度誤差約為0.03(°)/s,并逐漸穩定。
引入補償力矩進行仿真,當反作用輪輪速小于20rpm且力矩輸出小于0.008N·m時,在控制力矩輸出時疊加補償力矩,補償力矩選取頻率4Hz、輻值為0.008N·m的鋸齒波信號進行摩擦力矩補償。
由圖14所示,A,B,C三輪的輪速初始多次經過±20rpm。衛星三軸角度控制誤差和角速度誤差如圖15和16所示。
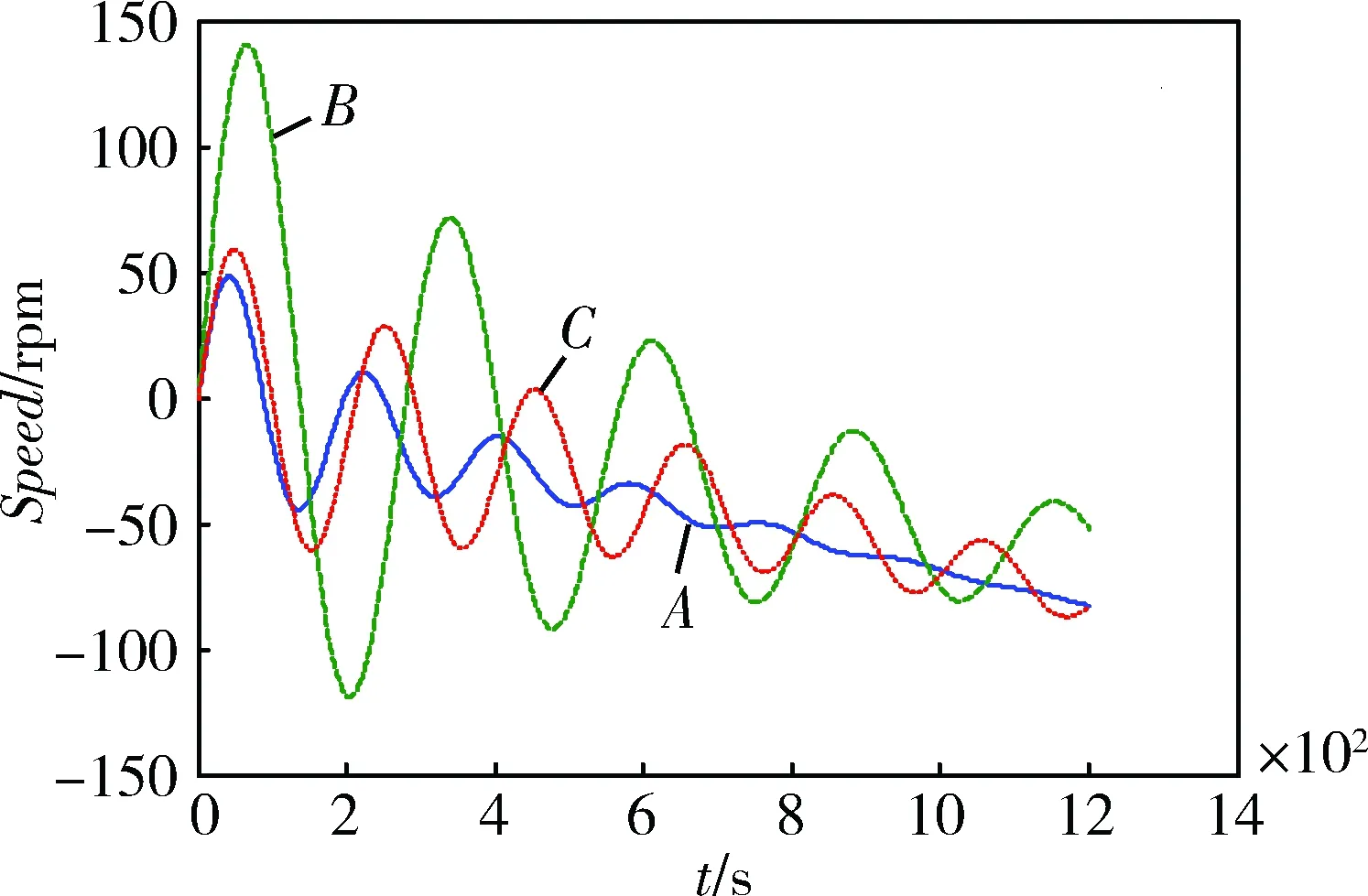
圖14 A,B,C三輪輪速曲線
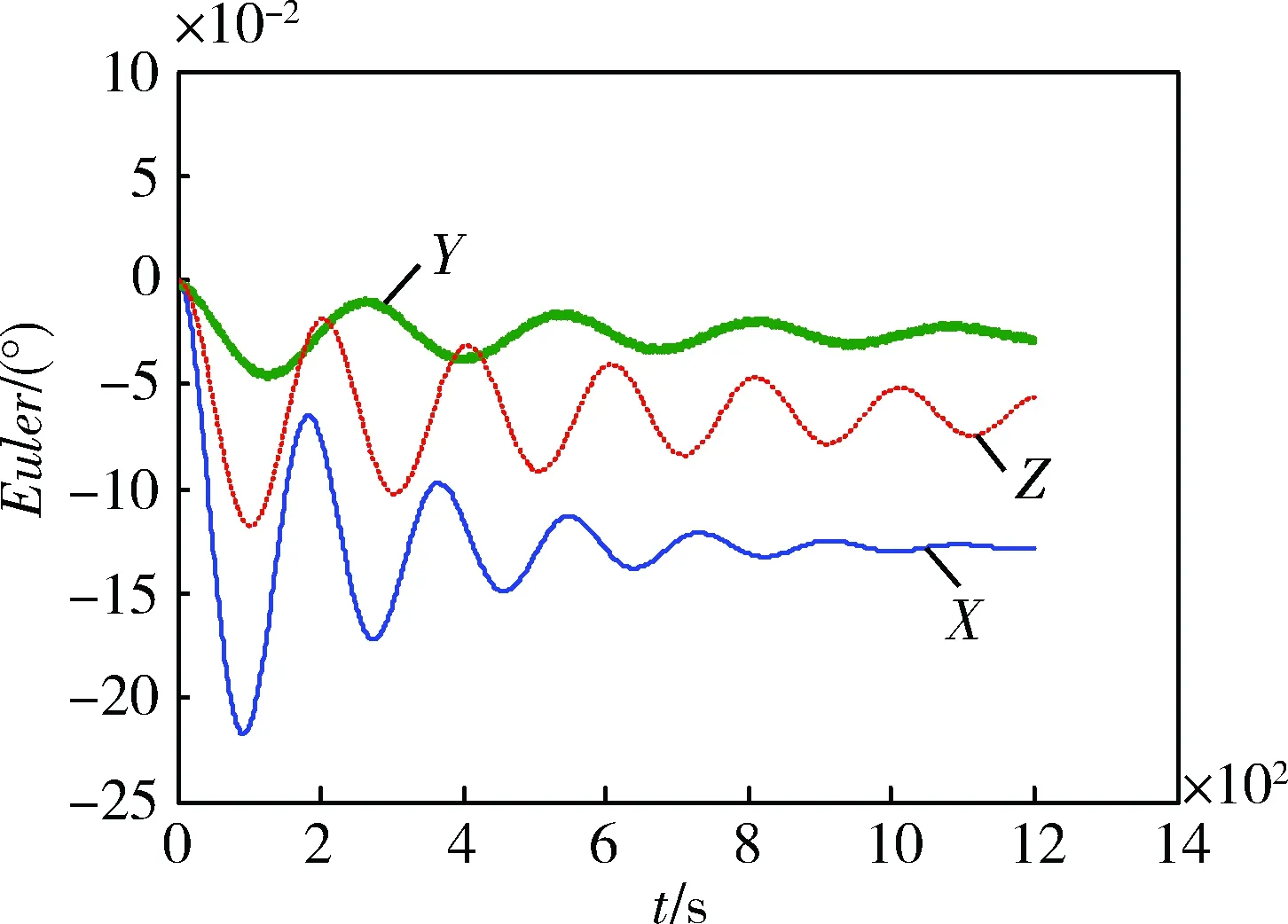
圖15 三軸姿態速度曲線
由圖可見,三軸姿態角誤差約為0.22°,三軸角速度誤差約為0.014(°)/s。與不補償摩擦力矩的仿真結果比較,通過疊加補償力矩,可以使控制效果由0.4°提高到0.2°。
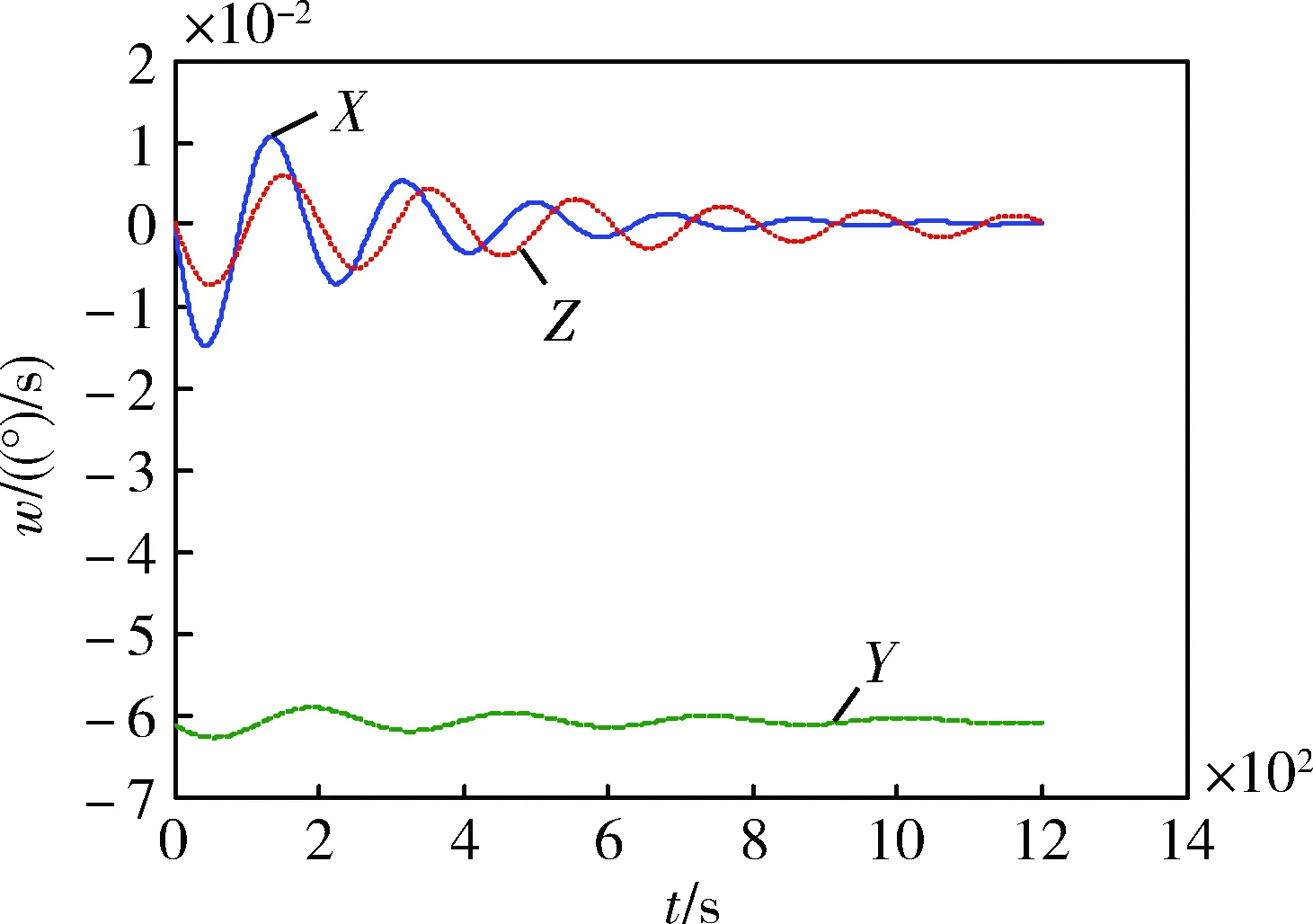
圖16 三軸姿態角速度曲線
4 結論
針對碳監測衛星中使用的反作用輪的摩擦力矩特性進行了分析。采用反作用輪電機力矩的時間序列信號為分析對象,引入Dahl理論模型為依據,采取4Hz的鋸齒波補償靜摩擦干擾力矩。仿真實驗結果表明,該方法可以有效地提高摩擦力矩補償效果。目前,該補償方法已在碳監測衛星多個研制階段進行了測試,具有較好的補償效果和實時性。
[1] 譚天樂,朱春艷,朱東方,等. 航天器微振動測試、隔離、抑制技術綜述[J]. 上海航天, 2014,31(6):31-45.(TanTianle,ZhuChunyan,ZhuDongfang,etal.OverviewofMicro-vibrationTesting,IsolationandSuppressionTchnologyforSpacecraft[J].AerospaceShanghai,2014,31(6):31-45.)
[2] 于登云.新型航天器發展對力學學科的挑戰[J]. 科學通報, 2015, 60: 1085-1094. (YuDengyun.MechanicalChallengesinAdvancedSpacecraftDevelopment[J].Chin.Sci.Bull, 2015, 60: 1085-1094.)
[3]EyermanCE,SheaJF.ASystemsEngineeringApproachtoDisturbanceMinimizationforSpacecraftUtilizingControlledStructuresTechnology[R].MITSERCReport,1990: 2-90.
[4]RunteT,BritoM,BourneDM.Analysis&testofreactionwheelinducedmicro-vibrations[C]. 13thEuropeanConferenceonSpacecraftStructures,Materials&EnvironmentalTestingProceedings, 2014: 293-7,Braunschweig.Germany.
[5] 趙煜,張鵬飛,程偉.反作用輪擾動特性測量及研究[J].實驗力學, 2009,24(6):532-538.(ZhaoYu,ZhangPengfei,ChenWei.MeasurementandStudyofDisturbanceCharacteristicsofReactionWheelAssembly[J].JournalofExperimentalMechanics, 2009, 24(6):532-538.)
[6] 李連軍,戴金海.反作用輪系統內干擾建模與仿真分析[J].系統仿真學報,2005,17(8):1855-1858.(LiLianjun,DaiJinhai.InnerDisturbanceModelingandSimulationAnalysisofReactionWheelSystem[J].JournalofSystemSimulation,2005,17 (8):1855-1858).
[7] 李太平,姚煜中,李霖圣,程世祥.不平衡飛輪的擾動特性[J]. 噪聲與振動控制,2014,34(3):34-41.(LiTaiping,YaoYuzhong,LiLinsheng,ChengShixiang.StudyonDisturbanceCharacteristicsofImbalanceFlywheels[J].NoiseandVibrationControl, 2014, 34(3):34- 41.)
[8] 楊寧寧,楊照華,余遠金.基于機械飛輪干擾補償的小衛星自適應滑模變結構姿態控制[J]. 航天控制,2013,31(1):51-57.(YangNingning,YangZhaohua,YuYuanjin.TheSmallSatelliteAdaptiveSlidingModeAttitudeControllerwithMechanicalFlywheelsDisturbanceCompensation[J].AerospaceControl, 2013,31(1) :51-57.)
[9] 王炳全,李瀛,楊滌.改善反作用輪低速性能的補償觀測器方法[J].空間科學學報,1999,19(4): 362-367.(WangBingquan,LiYing,YangDi.ACompensationObserverMethodforImprovementofPerformanceofLow-speedReactionWheel[J].Chin.J.SpaceSci, 1999, 19(4): 362-367.)
[10] 張愛華,胡慶雷,霍星.過驅動航天器自適應姿態補償控制及控制分配[J].哈爾濱工業大學學報,2014,46(1):18-22.(ZhangAihua,HuQinglei,Huoxing.AdaptiveAttitudeCompensationIntegratingwithControlAllocationforOverActuatedSpacecraft[J].JournalofHarbinInstituteofTechnology, 2014, 46(1):18-22.)
[11] 黃敦新. 姿控飛輪摩擦學系統關鍵技術研究[D]. 長春:長春光學精密機械與物理研究所,2010. (HuangDunxin.ResearchonKeyTechnologyofTribologySystemoftheAttitudeControlFlywheel[D].Changchun:ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,China, 2010.)
[12]JohnB.StetsonJr.ReactionWheellow-speedCompensationUsingaDitherSignal[J].J.Guid.Contr.Dyn. 1993, 16(4):617-622.
Research on Friction Model and Compensation at Zero Speed of Reaction Wheel
Liu Guohua, Yin Zengshan, Wang Long, Yao Xiaosong, Liu Qi
Shanghai Engineer Center of Microsatllite, Shanghai 201203, China
Thefrictiontorquecharacteristicsofreactionwheelareanalyzed,whicharebasedonthecarbonmonitoringsatelliteinthispaper.TimeseriessignalofreactionwheelmotortorqueisusedastheanalysisobjectbyusingDahlmodel,themethodofthefrictiontorquecompensationisproposedbybiassignalcombinedwithdithersignalandthesignalvalueisresearched.Thebiassignalbasedonthestatisticalpropertiesofthereactionwheeltorqueconstantoutputandthevibrationsignalbasedonthespectralcharacteristicsofthespeedarevalued.Thesimulationresultsshowthatthefrictiontorquecompensationcanbeeffectivelyimprovedbyusingthismethod.
Reactionwheel;Timeseriessignal;Frictioncompensation;Dithersignal
*國家高技術研究發展863計劃(2011AA12A101);中科院國防科技創新基金(CXJJ-14-Q52)
2013-03-12
劉國華(1980-),男,湖北荊門人,博士,副研究員,主要研究方向為衛星控制系統設計;尹增山(1971-),男,山東人,研究員,研究方向為衛星總體設計;王 龍(1989-),男,江西吉安人,博士研究生,主要研究方向為硬件設計;姚小松(1987-),男,江蘇泰州人,碩士,助理研究員,主要研究方向為衛星控制系統軟件設計;劉 琦(1990-),女,安徽馬鞍山人,本科,助理研究員,主要研究方向為衛星控制系統硬件設計。
V448
A
1006-3242(2016)01-0057-07