基于圖像處理的疲勞裂紋擴展長度在線測量方法
2016-08-16 07:04:40高紅俐鄭歡斌齊子誠
中國機械工程 2016年7期
高紅俐 鄭歡斌 姜 偉 齊子誠,2
1.浙江工業大學特種裝備制造與先進加工技術教育部/浙江省重點實驗室,杭州,3100142.中國兵器科學研究院寧波分院,寧波,315103
?
基于圖像處理的疲勞裂紋擴展長度在線測量方法
高紅俐1鄭歡斌1姜偉1齊子誠1,2
1.浙江工業大學特種裝備制造與先進加工技術教育部/浙江省重點實驗室,杭州,3100142.中國兵器科學研究院寧波分院,寧波,315103
為了在金屬疲勞裂紋擴展試驗中采用直觀、準確、可靠的方法獲得高精度裂紋長度尺寸,提出了基于圖像處理技術的疲勞裂紋擴展長度在線測量方法。首先,采用大尺寸黑白全幀面陣CCD和微距顯微鏡頭對疲勞裂紋擴展過程中的圖像進行采集,分析疲勞裂紋的圖像形態特征,采用亞像素邊緣定位方法對預制裂紋邊緣進行檢測,求出疲勞裂紋起點位置。然后,對裂紋擴展區域進行圖像子區劃分,對圖像子區采用基于灰度統計數據的自適應分割方法進行裂紋分割,采用單區域增長算法進行二值化裂紋圖像連接得到裂紋主干。最后,進行了系統標定和疲勞裂紋長度在線測量試驗。試驗結果表明:本方法測量精度高、抗干擾能力強、數據穩定可靠,裂紋長度測量精度為0.03 mm,滿足裂紋擴展試驗國際標準的要求。
圖像采集與處理;疲勞裂紋擴展試驗;裂紋擴展長度;灰度方差;在線測量
0 引言
金屬疲勞裂紋擴展試驗是一種通過實時測量試件在設定交變載荷作用下所產生疲勞裂紋的長度來研究金屬材料疲勞斷裂特性的一種測試方式,目前主要的試驗形式是采用相應標準[1-2]規定的標準CT緊湊拉伸試件所進行的試驗。進行疲勞裂紋擴展試驗時,要保證試驗結果的準確性,需精確在線測量疲勞裂紋擴展過程中的裂紋長度尺寸。傳統的顯微鏡法觀測疲勞裂紋長度,往往由人工來完成或大部分環節需要人工參與,不僅工作效率低,而且易受到檢測人員主觀因素的影響,不能保證檢測的效率與精度,已經不能滿足試驗的要求。以往裂紋尺寸在線檢測方法有柔度法、渦流法、聲發射法及交直流電位法,但是都不同程度地存在精度不高、操作繁瑣、抗干擾性差和不易實現自動記錄等問題[3-7]。
眾所周知,基于圖像處理的機械視覺技術應用于工業產品的測量領域,在保證測量要求的同時,使系統具有非接觸、適應能力強、快速高效、準確、柔性好、可靠性高、操作簡便和成本低等特點[8-12]。采用圖像處理技術的裂紋檢測方法,可以直觀、精確、實時、可靠地完成裂紋的檢測和進一步的分析處理[10-12]。
本文將圖像處理技術應用于疲勞裂紋擴展試驗過程中裂紋擴展長度的在線測量與分析中,采用高速開關工業相機對疲勞裂紋擴展過程中的動態系列圖像進行采集,并對所采集到的圖像,提出了基于裂紋圖像分段子區灰度統計數據的自適應分割方法,以及沿預制裂紋水平方向單區域增長的裂紋連接算法。
1 疲勞裂紋圖像采集
1.1裂紋圖像采集與測量系統
金屬疲勞裂紋擴展試驗裂紋圖像采集系統總體組成原理框圖見圖1,系統包括裂紋圖像采集與測量裝置、攝像頭安裝裝置及其運動控制系統、疲勞試驗機、試驗載荷控制系統及安裝有相關應用軟件的計算機。圖像采集裝置包括CCD光學傳感器、光學鏡頭,光源照明裝置和圖像采集卡, 前三者安裝在攝像頭安裝支架上組成裂紋圖像成像單元,圖像采集卡通過PCI擴展槽與計算機相連。攝像頭安裝支架與攝像頭運動機構相連,攝像頭運動機構由X、Y、Z軸位置調整機構組成,均為高度細分的步進電機驅動的高精度的滾珠導軌機構。在攝像頭運動控制系統的控制下,攝像頭可沿X、Y、Z軸高精度直線運動,實現攝像頭和試件之間位置的精確調整。

圖1 裂紋圖像采集與測量系統總體組成原理框圖
首先將帶有預制裂紋的CT試件安裝在疲勞試驗機上,通過攝像頭運動控制系統,調整攝像頭和試件之間的位置,進行聚焦及試件圖像采集視場調整。然后,開始疲勞裂紋擴展試驗,試件在試驗機所產生的交變載荷的作用下裂紋不斷擴展,如圖2所示。振動中的系列試件裂紋圖像通過高速開關CCD攝像機采集,并通過圖像采集卡轉換為數字圖像,傳輸到裝有疲勞裂紋測量圖像處理軟件的計算機上進行處理。
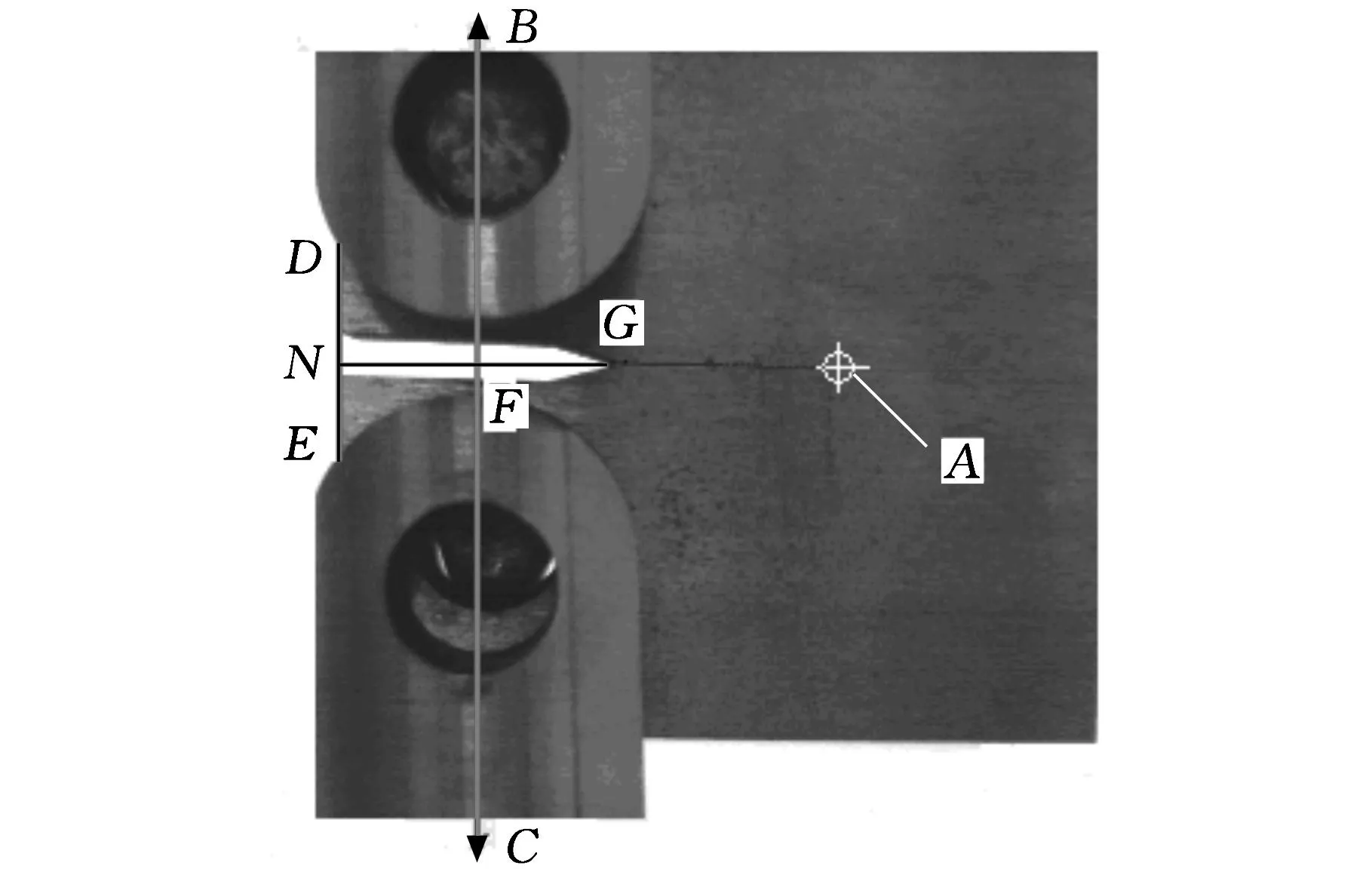
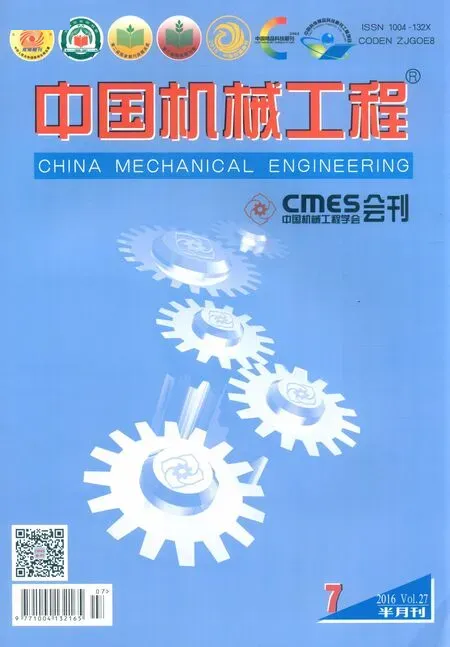
圖2 標準CT試件及安裝示意圖
1.2裂紋圖像成像與采集系統設計
1.2.1鏡頭、CCD參數
裂紋圖像成像單元可安裝在試件的一側用以采集試件一個表面的圖像,也可安裝在試件的兩測分別采集試件兩個表面的圖像,CCD和鏡頭組件在安裝及運動過程中必須嚴格保證其中心線垂直于試件表面,鏡頭為與CCD相匹配的顯微變焦放大鏡頭或微距鏡頭,光源采用環形或矩形光源。本系統采用加拿大DALSA公司生產的Pantera系列大面陣工業相機CameraLink22M04,此相機采用DALSA全幀黑白面陣CCD-FTF4052M,其分辨率為5344 pixel×4008 pixel,像素尺寸為9 μm×9 μm,CCD靶面尺寸為48 mm×36 mm,鏡頭為與之匹配的百萬像素微距顯微鏡頭,最大放大倍率為1.0倍,相機快門速度由一秒到萬分之一秒可調。圖像采集卡采用北京大恒生產的高分辨率圖像采集卡。這樣系統在硬件上所能達到的分辨率為0.009 mm/pixel,完全滿足國際標準規定的0.1 mm測量精度的要求。另外,如圖2所示,對于標準CT試件,從預制裂紋頂點G到試件右側邊緣的長度為45 mm,這樣選用放大倍率為1的微距顯微鏡頭和靶面橫向尺寸為48 mm的CCD傳感器,能滿足裂紋圖像采集的視場要求。
1.2.2振動試件裂紋圖像的高速開關CCD采集
采用圖像處理技術測量正弦交變載荷作用下高速振動試件上的疲勞裂紋尺寸,必須要消除圖像運動模糊所造成的測量誤差,應保證在圖像采集的瞬間試件是相對靜止的,通常有高速攝像技術、頻閃照明技術、高速開關CCD采集三種方法,前兩者均可精確采集在一個載荷周期內系列試件裂紋圖像,這些圖像具有同樣的裂紋長度、擴展方向及不同的裂紋輪廓形狀,但設備復雜、價格昂貴。本文旨在測量疲勞裂紋的擴展長度和方向,可采用高速開關CCD隨機采集系列試件裂紋圖像,這是因為:①各種金屬和合金材料的疲勞裂紋擴展試驗,不論是諧振式高頻疲勞試驗還是強迫振動式低頻疲勞試驗,裂紋擴展都非常緩慢,對于穩態裂紋擴展階段,在一個甚至幾十個載荷周期內裂紋是不會向前擴展的;②如圖2所示,在沿垂直加力線BC方向施加在試件上的拉伸交變載荷的作用下,試件只做垂直方向的運動,而且由于試驗載荷相對于預制裂紋水平中心線NG是對稱的,圖像的采集位置并不影響疲勞裂紋的擴展長度和方向的測量精度。本系統所采用工業相機快門速度為一秒到五萬分之一秒,經試驗和理論分析,能滿足上述圖像采集的要求。
1.3所采集試件裂紋圖像形態分析
根據斷裂力學理論分析,在交變載荷的作用下,疲勞裂紋基本沿著水平預制裂紋的方向直線延伸,試驗中所采集的大量試件裂紋圖像也驗證了這一觀點, 經過對裂紋圖像的進一步分析研究,可得出如下結論:
(1)疲勞裂紋相對于試件背景來說是一些灰度值較低的像素集合,一般來說是局部灰度最小值。裂紋目標像素在整個裂紋試件圖像中占據的比例很小, 一般不超過10%,在全局或局部直方圖中其峰值都遠低于背景直方圖峰值,如圖3所示,其中白色豎直線段右側和左側分別為背景和裂紋區域像素點。

圖3 裂紋圖像整體區域直方圖
(2)相比于加工邊緣等規則邊緣,疲勞裂紋邊緣的灰度分布和邊緣形狀都不規則,但基本沿著水平預制裂紋方向直線延伸,沒有明顯偏差,在擴展過程中會有向上或向下的微小偏移,如圖3所示。
(3)隨著裂紋的擴展,預制裂紋頂點處的裂紋張口不斷增大,但裂紋尖端的形態基本保持不變。
(4)當裂紋擴展長度較短(一般的情況下小于3 mm)時,裂紋在所采集的圖像上不是很清晰,測量誤差較大,但隨著裂紋的擴展,裂紋越來越清晰,可精確測量。
2 圖像處理裂紋擴展長度測量算法
如圖2所示,疲勞裂紋擴展長度的測量包括疲勞裂紋起點G和GA段裂紋擴展邊緣位置的確定。疲勞裂紋的起點即為預制裂紋頂點G,是兩條加工規則邊緣的交點,我們稱這兩條邊緣為預制裂紋邊緣。文中首先采用亞像素邊緣定位方法對預制裂紋頂點邊緣進行檢測,求出疲勞裂紋頂點位置,然后進行疲勞裂紋擴展邊緣位置識別及擴展長度測量,包括基于裂紋圖像分段子區灰度統計數據的自適應圖像分割方法、單區域增長裂紋邊緣連接算法、細化算法及最小二乘直線擬合求擴展長度等。
2.1疲勞裂紋起點的亞像素位置檢測
圖4a~圖4c分別為預制裂紋邊緣及其灰度分布和灰度梯度分布圖,為規則斜坡邊緣。對于這樣的規則邊緣,本文首先采用NI公司IMAQ-VISION平臺所提供的亞像素邊緣處理函數IMAQ Rake來檢測裂紋邊緣點亞像素坐標,使用Quadratic二次插值方法對裂紋邊緣點及其臨近邊緣點像素位置進行插值,從而求取裂紋邊緣點亞像素位置,然后采用IMAQ Fit Line函數把IMAQ Rake找出的裂紋邊緣點坐標擬合成直線,求得兩條頂點邊緣的直線方程,再采用IMAQ Lines Intersection函數求取兩條邊緣的交點坐標,即得到疲勞裂紋起點的亞像素位置。

(a)預制裂紋邊緣

(b)預制裂紋邊緣灰度分布

(c)預制裂紋邊緣灰度梯度分布圖4 預制裂紋邊緣像素灰度及灰度梯度
2.2疲勞裂紋擴展邊緣的位置識別與測量

圖5 線性高通邊緣增強濾波器裂紋圖像處理效果
為保證疲勞裂紋尺寸測量的精確性,必須在圖像預處理及以后的處理過程中嚴格保證裂紋邊緣的位置,因此,類似中值濾波的既保證邊緣細節又能去除噪聲的非線性濾波器就不能在裂紋處理中應用;其他線性濾波器又會模糊裂紋邊緣,也不適用。采用某些邊緣增強算法雖然起到一定的裂紋邊緣增強效果,但會造成裂紋尖端部分細節的損失,如圖5所示,采用線性高通邊緣增強濾波器對裂紋圖像進行處理,通過原圖(圖5上圖)和邊緣增強后效果圖(圖5下圖)的比較可以清楚地看到這點。所以本文不采取任何濾波去噪及邊緣增強處理方法,而是采用原圖直接進行圖像分割與識別。
2.2.1基于灰度統計數據的自適應分割方法
2.2.1.1裂紋圖像灰度統計分析
數字圖像的灰度直方圖是圖像灰度級的函數,描述的是圖像中每種灰度級像素的個數,反映圖像中每種灰度出現的頻率,是分析圖像特征的主要工具。數字圖像直方圖為一個離散函數為
h(ri)=ni
歸一化直方圖為
p(ri)=ni/n
式中,n為圖像的像素總數;ni為圖像中灰度級為ri的像素個數,ri是第i個灰度級。
根據此定義編程對裂紋圖像不同區域計算其灰度直方圖h(ri),得到圖6所示裂紋區域及背景區域局部直方圖。根據直方圖數據計算得到相應圖像子區的灰度均值和方差,據此對裂紋圖像特征進行進一步分析。均值m和方差σ2是反映所分析圖像子區灰度分布水平和灰度對比度的參量,計算公式如下:
(1)
(2)
式中,L為最大灰度級。
由于疲勞裂紋的自然形態特征、光照和裂紋表面處理不均勻等因素, 裂紋圖像中的不同位置上呈現出不同的灰度均值及方差,尤其是裂紋尖端灰度方差較小,裂紋和試件背景灰度差別較小,較難識別。純背景區域灰度分布方差要小于裂紋和背景混合區域的灰度分布方差, 圖6b包含背景和裂紋兩種區域,灰度分布方差較大,數值為31.48;圖6a只包含一種區域,灰度分布比較均勻,則灰度分布方差較小,數值為9.12。

(a)背景區域圖像子區
(b)包含裂紋區域圖像子區圖6 圖像子區局部直方圖
2.2.1.2裂紋頂點圖像子區的確定
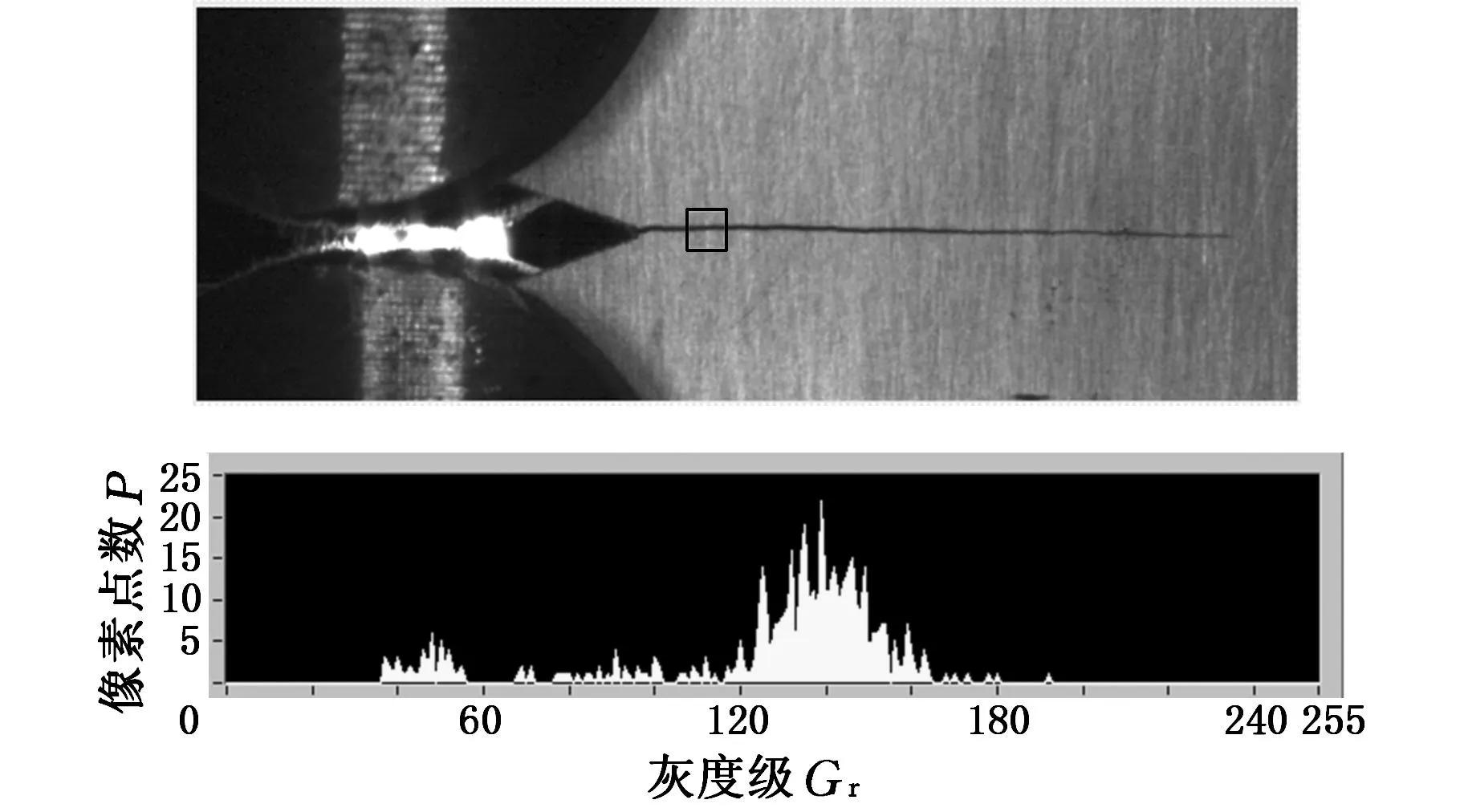
圖7 裂紋圖像子區分割示意圖
選擇對稱于預制裂紋擴展水平線的包括疲勞裂紋在內的狹長矩形區域作為圖像分析ROI區域,從預制裂紋起點開始到裂紋右邊緣位置,將其劃分為兩排同樣尺寸的多個正方形區域圖像子區,如圖7所示。圖中網格一排包含裂紋和背景,一排為與之相鄰的純背景區域。采用式(2)對每個圖像子區計算其灰度方差,并求出同一列兩個圖像子區灰度方差之差,得到圖8所示沿疲勞裂紋擴展方向的圖像子區灰度方差分布規律。從圖8中可以看出,從裂紋起點到試件右邊緣,背景圖像子區的方差雖然略有波動但變化很小,但包含裂紋的圖像子區的灰度方差變化很大,開始階段子區方差較大,然后逐漸變小直到與相關背景子區方差相等,說明越到裂紋尖端區域裂紋和試件背景灰度差別較小,越難識別,如果兩個對應子區灰度方差基本相等則說明裂紋并沒有擴展到這一子區,曲線2所代表的方差差值的變化規律更直接地表明了這一點,可根據這一規律將裂紋擴展方向上不包括疲勞裂紋的圖像子區排除。

1.包含裂紋的圖像子區方差 2.相應圖像子區方差差值 3.相應背景圖像子區方差圖8 圖像子區灰度方差分布規律
2.2.1.3自適應分割方法
將包含裂紋的圖像子區進行直方圖h(rk)計算,得到直方圖二維數組,數據的索引數即為像素灰度級,數組元素值即為此灰度級下的像素個數。采用基于裂紋圖像子區灰度均值的自適應迭代方法進行每個子區的裂紋分割,得到圖9a所示的裂紋圖像的二值化圖像,如圖9b所示。裂紋圖像子區分割方法描寫如下:
(1)為全局閾值選擇一個初始的估計值T,初始閾值必須大于圖像的最小灰度級而小于最大灰度級。
(2)用T分割圖像產生兩個子圖像G1和G2,G1由灰度值不大于T的所有像素組成,G2由灰度值大于T 的所有像素組成。
(3)對G1和G2的分別計算其平均灰度值m1和m2:
(3)
其中,i為直方圖數據的索引,也就是像素的灰度值,ni為對所應灰度值的像素個數。
(4)計算一個新閾值:
(4)
(5)重復步驟(2)~步驟(4),直到前后兩次迭代的差值ΔT小于預定義的參數ΔT0為止。
2.2.2裂紋連接
二值化后的裂紋圖像裂紋區域存在多處小的間斷,尤其是靠近裂紋尖端區域等裂紋和試件之間灰度差值較小的區域,為了精確地檢測出裂紋,需對分割后的二值化裂紋圖像進行連接閉合。試件的裂紋邊緣不同其他的加工的規則零件邊緣,較難識別,常規的圖像形態學閉合方法能很好地完成裂紋的連接,但圖像形態學方法會影響裂紋的邊緣像素位置,從而影響裂紋尺寸測量精度。因此,本文采用一種單連接區域增長技術,把兩個像素視為連接圖中的一個節點,將單個像素在空間與其他相鄰像素的特性進行比較,將特性足夠相似的相鄰像素連接起來,從而實現區域的增長。裂紋像素之間具有一定的相似性,都是從預制裂紋頂點開始向右邊界擴展,大致保持水平。利用裂紋像素的幅度和方向來確定它們之間的相似性,以預制裂紋頂點為起點向右邊界生長,將具有相似性的像素點連接起來得到圖9c所示的連接圖,裂紋連接實現方法描述如下:

(a)原圖

(b)裂紋圖像分割圖

(c)裂紋圖像連接圖
圖9疲勞裂紋分割與連接效果圖
(1)裂紋起點開始每列掃描,如遇到像素值為1的像素點A時,判斷該像素點左邊3×3小區域內像素值,如圖10所示,圖中A、B、C均為像素點。當B12、B13、B21、B22、B23、B32、B33像素值都等于1時,則將A點歸類到裂紋區域內的點進行增長,當B12、B13、B21、B22、B23、B32、B33像素值都等于0時,將A點像素值置零。

圖10 單區域增長裂紋圖像連接原理示意圖
(2)每列掃描,如遇到像素值為0時,繼續掃描。
(3)斷邊連接的算法為:當B13、B23、B33都為零,而B12、B22、B32像素值都等于1時,將B23置1;當B12、B22、B32、B13、B23、B33都為零,而B21=1時,將B22、B23置1。
2.2.3裂紋細化與識別
連接后的裂紋圖像除裂紋骨干外仍存在毛刺和樹突,為實現裂紋細化與識別,首先將連接后的裂紋骨架化,然后采用壓縮編碼的方法將骨架化后裂紋二值圖像再進行處理,轉化為單根寬度為1個像素的裂紋圖像,將裂紋圖像轉換為保存裂紋點位置的二維數組。解碼恢復細化后的圖像,實現算法描述如下:設連接后的裂紋圖像尺寸為m×n,創建一個與圖像素數相等的二維數組Amn,數組中所存為細化后二值化裂紋骨干,再建立一個和數組Amn相對應的位置寄存器數組Bmn存儲裂紋點相應的位置坐標。以預制裂紋頂點為起點,按列搜索:
(1)將裂紋擴展起點位置(x,y)存入Amn對應列和寄存器數組Bmn中,轉入下一列掃描。
(2)遇到像素為0時,繼續搜索。如果整列都沒有像素為1的點,則將數組Amn對應列的所有數置零。
(3)其后將整列像素為1的點與前一列存入寄存器數組Bmn中位置的裂紋點進行比較,取距離最近的點為裂紋點,將該點位置存入Amn對應列和寄存器數組Bmn中,轉入下一列掃描。按此規則直至掃描結束。
將細化后得到的裂紋點進行最小二乘直線擬合,得到裂紋擴展長度的像素值。
3 試驗及結果分析

圖11 系統試驗裝置圖
為驗證所提出的疲勞裂紋擴展長度在線測量方法,本文建立了圖1所示的試驗平臺,試驗裝置實物如圖11所示。采用紅山PLG-100諧振式高頻疲勞試驗機進行標準CT試件的疲勞裂紋擴展試驗,并用第2節中所述方法進行圖像采集,試驗過程中一秒采集一次圖像,經理論分析及多次試驗測試,設置相機快門速度為萬分之一秒,裂紋長度測量軟件開發平臺為IMAQ-VISION,為驗證測量結果的準確性,在穩態裂紋擴展過程中裂紋擴展到不同階段時,采用測量精度為0.001 mm的KEYENCE IM-6500系列圖像尺寸測量儀對疲勞裂紋擴展長度進行測量。為將裂紋像素長度轉化為實際的物理長度需先對系統進行標定。
3.1系統標定
標定試件及其尺寸數據如圖12所示,圖中尺寸單位均為cm。采用與疲勞裂紋擴展試驗所用試件具有同樣安裝定位尺寸的高精度加工的標準試件進行系統標定,在標準試件垂直方向和水平方向加工出一些具有不同尺寸的直角平臺,這些尺寸分布于水平方向和垂直方向的測量范圍內,圖中B、C、D、E、F、G、H、I、J、K、L、M均為標定點,標定點的識別方法和預制疲勞裂紋頂點的識別方法相同。

(a)試件

(b)試件幾何尺寸圖12 標定標準試件及其幾何尺寸(cm)
將加工好的標定試件按要求進行安裝,采集標定試件圖像,采用編制好的標定軟件計算標定點亞像素坐標,計算出相應標定點之間的亞像素距離,根據相應的設計加工尺寸,進行水平和垂直方向的分段標定,得出系統垂直方向和水平方向分段標定數據,如表1所示。
標定結果表明,在CCD不同位置的標定值基本相同,即鏡頭基本沒有畸變,且鏡頭和CCD中心線嚴格垂直于試件表面,標定數據平均值為0.009 49 mm/pixel,滿足裂紋長度測量的精度要求。

表1 標定數據及結果
3.2疲勞裂紋擴展長度測量試驗
疲勞裂紋擴展試驗所采用試樣為CT標準試件,材料為45號鋼,作用在試件上的正弦交變載荷參數為:初始振動頻率126.4 Hz,最小載荷4.52 kN,最大載荷8.66 kN。在穩態裂紋擴展過程中,載荷控制系統自動跟蹤由于裂紋擴展而逐漸減小的系統固有頻率,且控制試驗載荷保持在設定值;裂紋長度在線測量系統實時測量裂紋擴展長度數據,為檢驗其測量精度,在裂紋擴展到不同階段時需停止疲勞試驗,取下試件采用圖像尺寸測量儀測量裂紋擴展長度;測量完成后,試驗機仍按原來參數起振,繼續進行疲勞裂紋擴展試驗至下一測量點,直到所有測量點完成。
所開發系統測量的裂紋長度數據均是在疲勞裂紋擴展試驗過程中進行的。眾所周知,疲勞裂紋擴展試驗是一個長時間的試驗過程,在系統測量到一個裂紋擴展長度時需馬上停止試驗,并采用圖像尺寸測量儀測量裂紋長度。之后重新進行疲勞裂紋擴展試驗,既不影響測量的在線性也不影響測量精度。
表2所示為相應裂紋長度測量試驗數據表。由試驗結果可知:采用本文提出的疲勞裂紋動態測量方法對提高裂紋在線測量精度具有顯著效果。裂紋長度測量為動態在線測量,由于光線、識別算法等因素的影響,裂紋測量的精度不是固定數值,經多次試驗,測得最大裂紋長度測量誤差為0.028 mm。文獻[12]提出的機械視覺裂紋長度測量方法的測量誤差為0.076 mm。對比發現,本方法的測量精度更高,而且系統的抗干擾能力增強,測量結果更加穩定、可靠。
測量誤差主要是由于裂紋圖像處理算法、CCD圖像分辨率、環境的各種干擾因素及標定誤差所引起的,如要進一步提高其測量精度:一是采用更加精確的裂紋圖像識別算法;二是采用高分辨率大尺寸CCD及顯微放大鏡頭采集裂紋圖像;三是從硬件和軟件兩方面增強系統的可靠性設計,提高標準試件的加工精度、標定點位置檢測精度。

表2 裂紋擴展長度測量數據及分析結果
4 結論
(1)本文采用高速開關工業相機對疲勞裂紋擴展過程中的動態系列圖像進行采集,得到瞬間靜止的裂紋試件圖像,消除了由于試件圖像運動模糊所造成的測量誤差。
(2)分析了疲勞裂紋的圖像形態特征及測量原理,提出了基于裂紋圖像分段子區灰度統計數據的疲勞裂紋自適應分割方法和沿預制裂紋水平方向單區域增長的裂紋連接算法,可更加精確地檢測出裂紋和背景灰度差比較小的弱裂紋邊緣,提高了疲勞裂紋測量精度和可靠性。
(3)本文采用大尺寸黑白全幀面陣CCD和微距顯微鏡頭組成裂紋圖像采集系統,在疲勞裂紋擴展過程中攝像頭保持不動,一次采集到全部裂紋圖像,消除了攝像頭運動定位及圖像拼接所造成的誤差,可提高裂紋尺寸的測量精度。試驗結果表明:本方法測量精度高、抗干擾能力強、數據穩定可靠,裂紋長度測量精度可達0.03 mm。本文的研究成果為進一步研究疲勞裂紋擴展機理和擴展參數的測量奠定了理論和試驗基礎,具有重要的理論和應用價值。
[1]國家質量技術監督局. GB/T 6398-2000金屬材料疲勞裂紋擴展速率試驗方法[S]. 北京:中國標準出版社,2001.[2]British Standards Institution. ISO12108 Metallic Materials-Fatigue Testing-Fatigue Crack Growth Method[S]. UK: International Standard, 2002.[3]Verstraete M A,Hertele S, Denys R M, et al.Evaluation and Interpretation of Ductile Crack Extension in SENT Specimens Using Unloading Compliance Technique[J]. Engineering Fracture Mechanics, 2014, 115: 190-203.
[4]李光海,劉正義.基于聲發射技術的金屬高頻疲勞監測[J].中國機械工程,2004,18(7):1205-1209.
Li Guanghai,Liu Zhengyi. Inspection of Metal High Frequency Cyclic Fatigue Behavior Utilizing Acoustic Emission Technique[J]. China Mechanical Engineering, 2004, 18(7): 1205-1209.[5]Antonaci P, Bocca P, Masera D.Fatigue Crack Propagation Monitoring by Acoustic Emission Signal Analysis[J]. Engineering Fracture Mechanics, 2012, 81: 26-32.[6]Yasumoto S, Naomi K, Natsuki O, et al.Automated Visualization of Surface Morphology of Cracks by Means of Induced Current Potential Drop Technique[J]. NDT&E International, 2012, 49: 83-89.
[7]王亮,黃新躍,郭廣平.直流電位法檢測高溫合金的疲勞裂紋擴展性能[J].理化檢驗(物理分冊),2011,47(8):480-483.
Wang Liang, Huang Xinyue, Guo Guangping. Fatigue Crack Growth Behavior of Superalloy Detected by High Temperature Direct Current Potential Drop Method[J].PTCA(Part A:Phys. Test.), 2011, 47(8): 480-483.
[8]孫建平,胡英成,王逢瑚,等.基于圖像處理的木材斷裂面分形分析[J].儀器儀表學報,2013, 34(12): 2818-2823.
Sun Jianping,Hu Yingcheng, Wang Fenghu, et al. Fractional Analysis of Wood Fracture Surface Based on Image Processing[J]. Chinese Journal of Scientific Instrument, 2013, 34(12): 2818-2823.
[9]楊永敏,樊繼壯,趙杰. 強反射表面缺陷圖像預處理[J].光學精密工程,2010,18(10):2288-2296.
Yang Yongmin, Fan Jizhuang, Zhao Jie. Preprocessing for Highly Reflective Surface Defect Image[J].Optics and Precision Engineering, 2010, 18(10):2288-2296.
[10]Valen?a J, Dias-da-Costa D, Julio E, et al.Automatic Crack Monitoring Using Photogrammetry and Image Processing[J].Measurement, 2013, 46(1): 433-441.
[11]Yang Yuansen, Yang Chuangming, Huang Changwei.Thin Crack Observation in a Reinforced Concrete Bridge Pier Test Using Image Processing and Analysis[J].Advances in Engineering Software, 2015, 83: 99-108.
[12]周見行,高紅俐,齊子誠,等.基于攝像頭自動跟蹤定位的疲勞裂紋在線測量方法研究[J].中國機械工程,2011,22(11):1302-1306.
Zhou Jianxing, Gao Hongli, Qi Zicheng, et al. Study on On-line Measurement Method of Fatigue Crack Length Based on Camera Automatically Tracking and Positioning[J]. China Mechanical Engineering,2011, 22(11): 1302-1306.
(編輯王旻玥)
Online Measuring Method of Fatigue Crack Growing Length Based on Image Processing Technology
Gao Hongli1Zheng Huanbin1Jiang Wei1Qi Zicheng1,2
1.Key Laboratory of Special Purpose Equipment and Advanced Machining Technology, Ministry of Education & Zhejiang Province, Zhejiang University of Technology,Hangzhou,310014 2.Ningbo Branch of China Academy of Ordnance Science,Ningbo,Zhejiang,315103
Based on image processing technology, a fatigue crack growing length online measuring method was proposed herein to obtain high precision crack length data by applying direct, reliable,accurate method in the fatigue crack propagation test.Firstly,a series of digital images in the process of fatigue crack propagation was collected by high-speed switching industrial camera that consists of a large scale area array CCD and a macro micro lens, and the morphological characteristics of fatigue crack image were analyzed. Then, sub-pixel edge detection method was used to detect the prefabricated crack edge in order to obtain the fatigue start position. Secondly, the crack region was divided into multiple square sub-images from fatigue crack start point to right specimen edge.The sub-images were segmented to binary images by adaptive image segmentation method based on grayscale statistics. The crack skeleton could be obtained by connecting the binary crack images applying the single-domain growing algorithm. Finally, system calibration and online measuring experiments of crack lengths were done. The experimental results indicate that the proposed method is of non contact,high precision, with strong anti-interference ability, and experimental data is stable and reliable. The measuring precision of crack length reaches 0.03 mm, which can satisfy the international standard of fatigue crack propagation test.
image acquisition and processing;fatigue crack propagation test;crack growing length;gray square deviation;online measurement
2015-05-18
TP394.1;TH691.9DOI:10.3969/j.issn.1004-132X.2016.07.012
高紅俐,女,1968年生。浙江工業大學特種裝備制造與先進加工技術教育部/浙江省重點實驗室副教授、博士。主要研究方向為系統動態特性分析、測量與控制、機器視覺技術等。發表論文30余篇。鄭歡斌,男,1989年生。浙江工業大學特種裝備制造與先進加工技術教育部/浙江省重點實驗室碩士研究生。姜偉(通信作者),男,1963年生。浙江工業大學特種裝備制造與先進加工技術教育部/浙江省重點實驗室教授、博士研究生導師。齊子誠,男,1985年生。浙江工業大學特種裝備制造與先進加工技術教育部/浙江省重點實驗室博士研究生,中國兵器科學研究院寧波分院工程師。
猜你喜歡
艦船科學技術(2022年13期)2022-08-11 09:29:16
成都信息工程大學學報(2021年4期)2021-11-22 07:44:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
World Journal of Diabetes(2019年7期)2019-07-23 11:52:08
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
四川輕化工大學學報(自然科學版)(2017年3期)2017-06-29 12:00:57
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
建筑材料學報(2014年3期)2014-03-11 17:08:02