一種形狀記憶合金壓緊釋放裝置設計與試驗
2016-09-08 03:20:26楊巧龍閆澤紅張小勇閆曉軍北京空間飛行器總體設計部北京00094北京航空航天大學能源與動力工程學院北京009
航天器工程 2016年3期
關鍵詞:設計
劉 穎 楊巧龍 閆澤紅 張小勇 閆曉軍(北京空間飛行器總體設計部,北京 00094)(北京航空航天大學能源與動力工程學院,北京 009)
一種形狀記憶合金壓緊釋放裝置設計與試驗
劉穎1楊巧龍1閆澤紅1張小勇2閆曉軍2
(1北京空間飛行器總體設計部,北京 100094)
(2北京航空航天大學能源與動力工程學院,北京 100191)
研制了一種壓緊釋放裝置,利用分組滾棒減小釋放阻力,采用微小間隙(≤0.05mm)主動控制壓緊面橫向位移,由形狀記憶合金(SMA)絲作為裝置驅動源。文章提出了求解釋放阻力與SMA回復力的設計方法,并對部件關鍵參數進行了設計與分析。經過試驗驗證,在預緊載荷12000N、供電電流2A、—15℃真空環境下,釋放時間為7.6s。與測量結果相比,釋放時間與回復位移計算誤差小于5%。此SMA壓緊釋放裝置結構簡單、功耗低、壓緊面滑動微小,適用于精密展開部件的壓緊與釋放。
形狀記憶合金;微小間隙;壓緊釋放裝置
1 引言
目前,航天器壓緊釋放裝置多為火工裝置,火工裝置釋放產生的沖擊載荷對電子敏感器件和精密展開部件等造成的損害越來越受到航天界的關注。為了減少沖擊,國內外研發了多種非火工壓緊釋放裝置[1]。其中,多種形狀記憶合金(Shape Memory Alloys,SMA)壓緊釋放裝置成功實現了在軌應用[2]。SMA作為驅動源的直接驅動式壓緊釋放裝置(如利用SMA柱或環相變時產生的很大回復力拉斷限位銷釘或預制缺口的壓緊螺栓[3-4])雖結構簡單,但因截面積大,通電加熱或傳導加熱所需的時間長、功耗大。而將SMA絲作為觸發機構、儲能彈簧作為釋放機構的觸發式SMA壓緊釋放裝置,可用10N左右的觸發力來觸發幾百牛頓的釋放力[5-7]。此情況下對SMA提供回復力的需求要比直接驅動式壓緊釋放裝置的低。該裝置釋放時間短、功耗低,但多級釋放的結構過于復雜,傳力路徑長,對部組件配合精度的要求高。
在傳統的SMA壓緊釋放裝置設計中,設計者一般從材料性能出發,求解SMA回復力與釋放阻力的關系[8]。這種設計方法為滿足工程需求,須經多次迭代,反復優選SMA設計參數。
針對上述直接驅動式SMA壓緊釋放裝置釋放時間長、功耗大,以及觸發式SMA壓緊釋放裝置結構復雜、傳力路徑長的問題,本文研制了一種結構簡單、快速釋放的SMA壓緊釋放裝置,并提出一種基于工程需求的求解釋放阻力與SMA回復力關系的設計方法。
2 方案設計
2.1方案原理
本文提出的基于微小間隙(≤0.05m)、可靠分離的大承載低沖擊分組滾棒式SMA壓緊釋放裝置(后文簡稱SMA壓緊釋放裝置)構成如圖1所示,頂蓋17以下部分主體尺寸為Φ46mm×80mm,以上部分可根據壓緊物體定制。
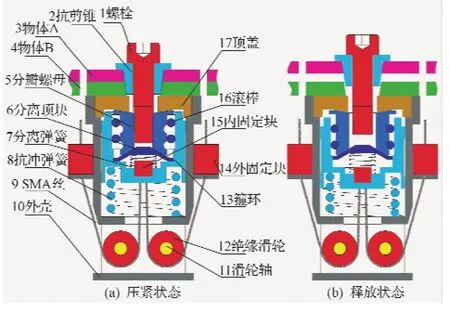
圖1 SMA壓緊釋放裝置組成示意圖Fig.1 Configuration of SMA hold-down&release device
在衛星發射段的壓緊狀態下,箍環13將分瓣螺母5抱緊,使之成為完整的螺紋副,螺栓1穿過抗剪錐擰入分瓣螺母中并由外部加力矩,壓緊物體A和物體B;在橫向過載過大,超過物體A和物體B間的摩擦力時,抗剪錐-套可以主動承擔橫向載荷,從而使物體A和物體B只發生微小錯動(≤0.05mm);抗沖彈簧8頂緊箍環13,避免其在發射段的振動載荷下的移動導致SMA壓緊釋放裝置非預期釋放。衛星到達指定軌道并給出釋放指令后,電源對SMA絲9通電,使其收縮,拉動箍環13下移,箍環13滾動滾棒16向下移動,分瓣螺母5失去徑向約束后,在分離彈簧7和分離頂塊6的作用下沿徑向分離,螺栓1在外力作用下彈出,從而實現物體A和物體B的釋放。
釋放完畢后,手動拉長SMA絲,直至抗沖彈簧推動箍環向上運動,帶動滾棒從分瓣螺母的圓弧槽中滾出。分瓣螺母在頂蓋和分離頂塊的作用下內移,形成完整的螺紋副。至此,機構完成復位,加載后可進行下一次分離操作。
2.2設計方法
本文基于Liang本構模型[9-10]、壓縮彈簧設計理論[11],提出一種SMA壓緊釋放裝置釋放阻力與SMA回復力求解方法,如圖2所示。相比于以SMA絲性能參數作為輸入的求解方法[8],以預緊力P為輸入,求解釋放阻力F與SMA回復力Fr,并直接得到所需的SMA性能參數,減少迭代次數,更貼近工程實際應用。通過裝置組成(圖1)及設計方法(圖2)可知,抗剪錐微小間隙實現方法、釋放阻力求解方法、SMA回復力預測為實現了本裝置功能的關鍵,本文對以上三者的參數開展了設計與分析。
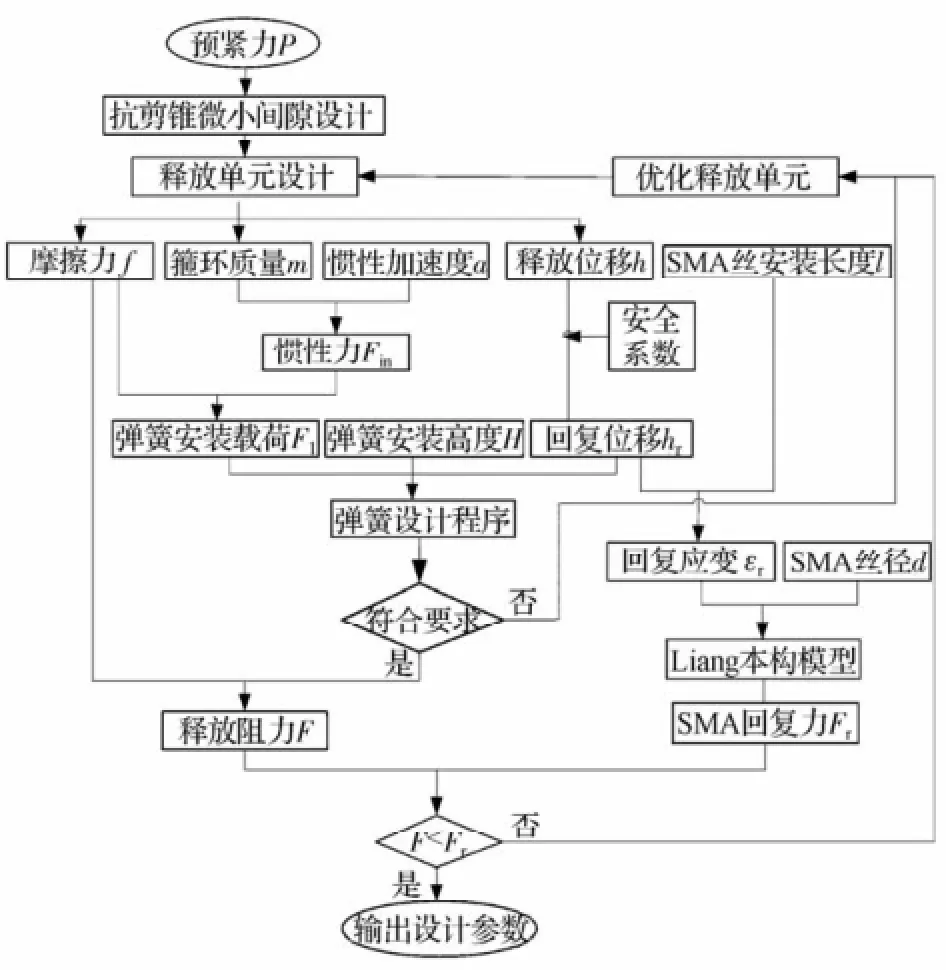
圖2 設計流程圖Fig.2 Flow chart of design
3 關鍵參數設計與分析
3.1抗剪錐微小間隙設計方法
分瓣螺母已有成熟設計理論[12],本文不再贅述,僅針對抗剪錐設計及實現微小間隙的方法開展研究。如圖3所示,抗剪錐的主要設計參數為分離面抗剪錐直徑S、錐孔壓力面高度a和b、錐角θ、錐面間隙ε。其中S、a和b決定了抗剪錐的抗剪能力;θ決定了橫向力轉為縱向力的量值以及拔出抗剪錐的難易程度。θ越大,徑向載荷轉為軸向載荷越大,但抗剪錐易拔出,θ越小則徑向載荷轉為軸向載荷越小,但抗剪錐難拔出,θ取值應略小于摩擦角,這樣橫向載荷與作用在抗剪錐表面的摩擦力形成自鎖,不會將橫向力轉化為可自動拔出的縱向力;ε決定了在壓緊力不足時壓緊物體的橫向位移。在材料選擇上,抗剪錐錐體選強度和剛度高的材料,錐孔選塑性和剛度較低的材料,這樣即使分離面滑移,發生塑性變形的是錐孔,在分離時不影響抗剪錐從錐孔中拔出。
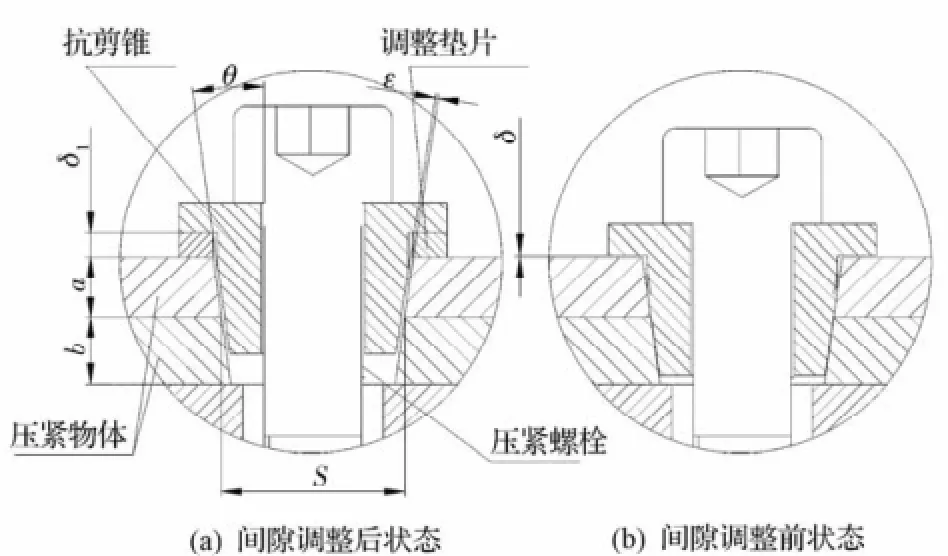
圖3 抗剪錐原理圖Fig.3 Principal chart of anti-cut cone
在壓緊釋放裝置中,小間隙一般受壓緊部件的覆蓋與遮擋,無法直接測試,本節提出了一種抗剪錐小間隙測試的方法。如圖3(b)所示,抗剪錐插入錐孔后,錐下端面和孔上端面之間留有間隙δ,將n個厚度為m的調整墊片墊在抗剪錐下厚度為δ1后,可實現抗剪錐和錐孔的間隙ε,見圖3(a)。上述各個參數的關系見式(1)。其中,δ、δ1、θ均已知,可根據產品需求設定間隙ε。

表1列舉了某航天產品中各個參數取值以及最終得到的微小間隙值。其中橫向間隙目標值為0.03±0.01mm,錐角7o,調整墊片厚0.05mm,裝配誤差最大為10%,達到預期目的。

表1 某航天產品微小間隙數據Table1 A space product's small gap data
3.2釋放阻力分析
釋放阻力是指SMA絲拉動箍環作動,從而使機構釋放需克服的阻力,是求解裝置所需的SMA回復力Fr的關鍵。本節以預緊載荷F0為12 000 N作為輸入條件,對釋放阻力F開展設計。圖4所示以分瓣螺母、滾棒、箍環為研究對象,對釋放阻力F進行分析,如式(2)所示。其中f2為滾棒和箍環之間的滾動摩擦力,N2為滾棒對箍環的正壓力,μ2為箍環和滾棒之間的滾動摩擦因數。

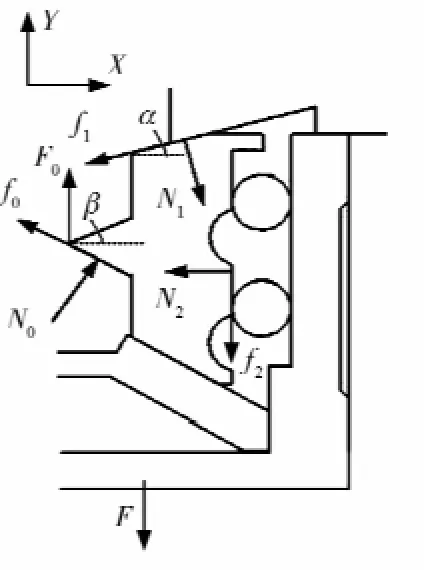
圖4 分瓣螺母受力圖Fig.4 Separation nuts force
由式(2)可知,計算輸出力的關鍵是計算出滾棒對箍環的正壓力N2。以螺栓為分析對象,在Y向受力平衡得到式(3),由式(2)和式(3)可得出式(5)。其中F0為施加在螺栓上的預緊力,N0為在F0作用下,螺紋之間的正壓力,f0為在F0作用下螺紋之間的摩擦力,μ0為螺紋接觸面之間的摩擦因數,β為螺紋牙型角的一半。
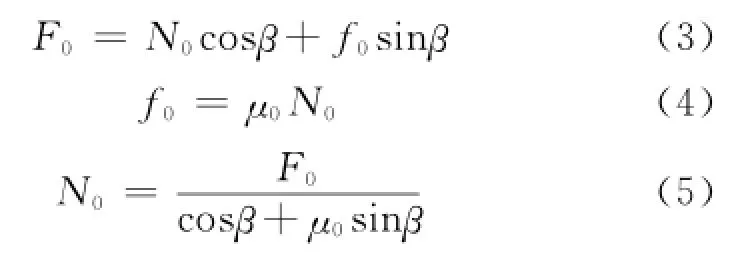
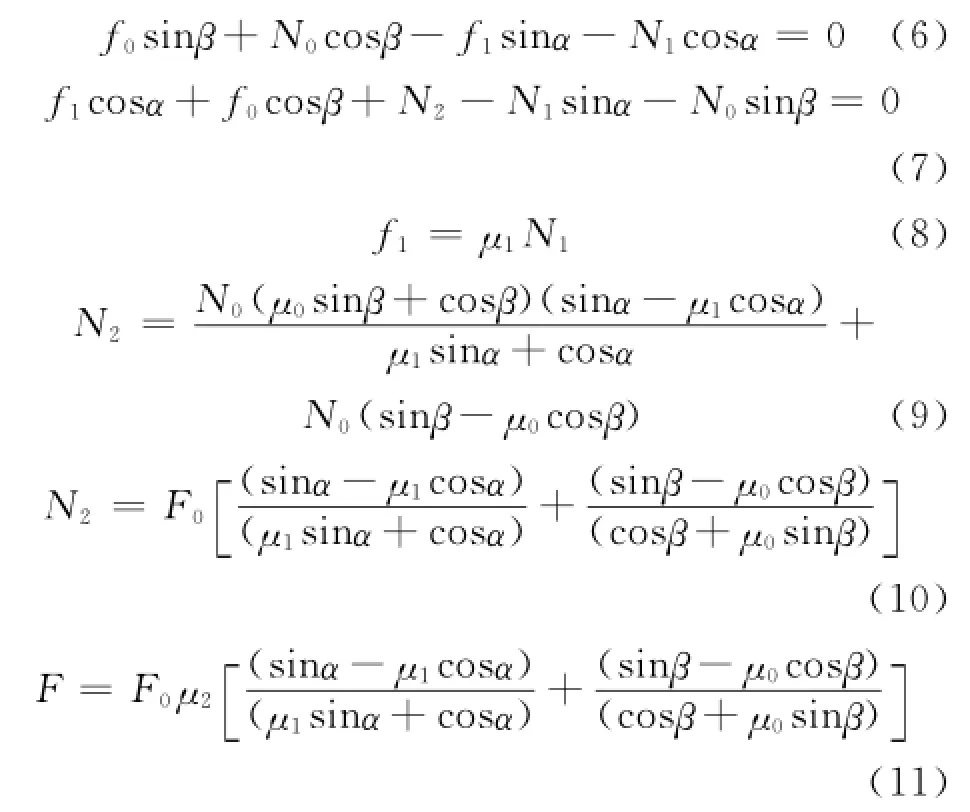
以分瓣螺母為分析對象,其在Y向受力平衡可得到式(6),在X向受力平衡得式(7),由式(5)~式(7)可得出式(9),將式(5)代入式(9)中可得到式(10),其中α為分瓣螺母上錐面角度,μ1為分瓣螺母頂端錐面和端蓋配合錐面之間摩擦系數。將式(10)代入式(2)中,得到驅動力F如式(11)所示。
將預緊載荷12 000 N代入到式(11)中,并結合空間約束,得到設計參數如表2所示。

表2 釋放阻力參數輸出列表Table2 List of unlocking data
3.3EMA絲驅動性能預測
驅動單元由SMA絲和抗沖彈簧組成,SMA絲產生回復力Fr,克服釋放阻力與抗沖彈簧的安裝載荷F1之和,產生回復位移hr拉動箍環運動,完成釋放;抗沖彈簧用以抵抗發射段加速度載荷,避免箍環向下運動使機構非預期釋放。也即驅動單元既要保證機構抵抗發射段載荷,又要保證機構成功釋放。目前一般用本構模型對SMA絲性能進行預測,根據SMA絲相變過程中某些物理量的變化,推測其他物理量的變化。本文選用Liang模型[8]對SMA絲回復應力進行預測(圖5)。
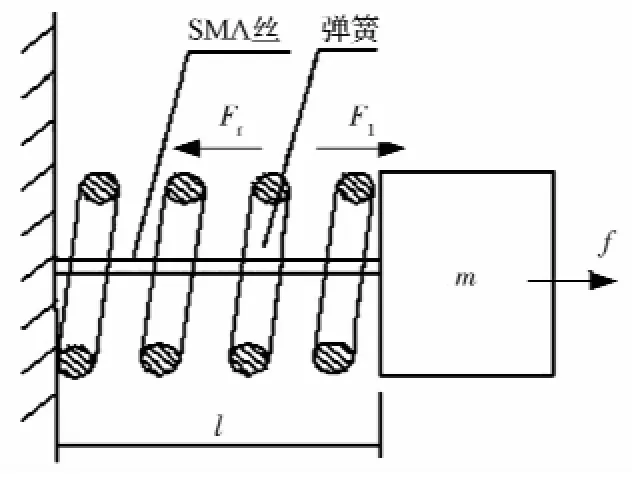
圖5 驅動單元模型Fig.5 Model of actuator unit
圖5所示邊界條件下的Liang本構模型叫做控制回復模型[8],該模型以馬氏體含量變化作為應力、應變變化的變量,考慮了線性阻力對于SMA絲應力、應變的影響。模型方程式詳見文獻[8]。將釋放單元中表2所示輸出參數代入到控制回復本構模型中,得到驅動單元的設計參數。在—15℃真空條件下(僅考慮輻射換熱),對SMA絲通電加熱,通電電流2A,得到回復位移-時間關系曲線,如圖6中SMA驅動性能預測曲線所示,得到的設計參數如表3所示。
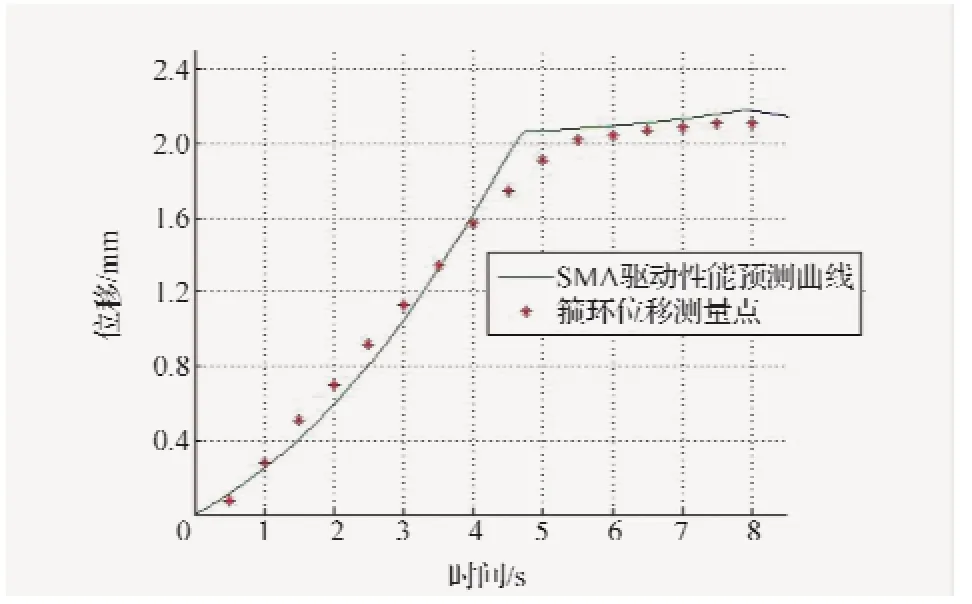
圖6 回復位移-時間測試與仿真對比Fig.6 Displacement and time comparison between measurement and analysis relationship

表3 驅動單元設計參數輸出列表Table3 Output of actuator unit design data
4 試驗驗證
通過方案原理可知,箍環位移表征了SMA絲的回復位移hr。因此,在完成SMA壓緊釋放裝置裝配后,對裝置通電,并利用外殼上的觀察孔測量箍環位移隨時間的關系,來評估SMA絲實際驅動性能與設計的符合性,觀察孔位置如圖7所示。
在預緊力為12000N、—15℃真空環境、供電電流2A的情況下,箍環測量位移隨時間的關系與分析曲線對比如圖6所示。通過圖6可知,SMA壓緊釋放裝置釋放時間為7.6s,釋放時箍環位移為2.1mm,箍環的運動規律與SMA驅動性能預測曲線趨勢吻合,相比于實際結果,釋放時間與回復位移計算誤差小于5%。
圖7 SMA壓緊釋放裝置上觀察孔的位置Fig.7 Hole on finished product for observing
5 結論
針對航天器低沖擊壓緊釋放裝置的需求,本文研制了一種以SMA作為驅動源、微小間隙主動控制壓緊面錯動的SMA壓緊釋放裝置,它具有結構簡單、功耗低、壓緊面滑動小、快速釋放的特點。本文提出的求解釋放阻力與SMA回復力的設計方法,經過試驗驗證,釋放時間和回復位移設計值與試驗值間的誤差小于5%。該誤差表明設計方法正確,可適用于精密展開部件的壓緊和釋放,具有工程應用潛力。
(References)
[1]Andrew Peffer,Keith Denoyer,Eugene Fosness,et al. Development and transition of low-shock spacecraft release devices[C]//2000 IEEE Aerospace Conference Proceedings,New York:IEEE,2000:277-284
[2]Peffer A C,Fosness E R,Carpenter F,et al.On-orbit experiments and applications of shape memory alloymechanisms[J].Proc.SPIE,2000(3991):187
[3]Darin M.Fastening apparatus having shape memory alloy actuator:Europe,EP 0498427[P].1992-11-03
[4]Lucy M,Hardy,Kist E.Report on alternative devices to pyrotechnics on spacecraft[C]//10thAnnual AIAA/ USU Conference on Small Satellites.Washington D.C.: AIAA,1996:1-19
[5]Andrew Tuszynski.Alternatives to pyrotechnics nitinol release mechanisms[C]//Proceedings of the 36th Aerospace Mechanisms Symposium&Hi-Shear Technology Corporation.Washington D.C.:NASA,2002:137-139
[6]李君山,梁旭,劉鵬,等.一種小型輕質折疊彈翼展開解鎖機構的設計及動力學仿真分析[J].航空兵器,2013 (4):7-10 Li Junshan,Liang Xu,Liu Peng,et al.System design and dynamic simulation analysis of release mechanism for a small-light folding wing[J].Aero Weaponry,2013 (4):7-10(in Chinese)
[7]Javier Vazquez,Jose Ignacio Bueno.Non explosive low shock 20k N hold-down release actuator[C].9th European Space Mechanisms&Tribology Symposium.Paris:ESA,2001:131-135
[8]張小勇,閆曉軍,楊巧龍.形狀記憶合金分瓣螺母空間解鎖機構的設計與試驗研究[J].機械工程學報,2010,46(17):145-150 Zhang Xiaoyong,Yan Xiaojun,Yang Qiaolong.Design and experimental research of a shape memory alloy space release device with segmented nut form[J]. Chinese Journal of Mechanical Engineering,2010,46 (17):145-150(in Chinese)
[9]Liang C,Roger C A.A one-dimensional thermo-mechnical constitutive relation of shape memory materials[J]. Journal of Intelligent Material Systems and Structures,1990,1(2):207-234
[10]陶寶祺.智能材料結構[M].北京:國防工業出版社,1997 Tao Baoqi.Smart materials and structures[M].Beijing:National Defence Industry Press,1997(in Chinese)
[11]張英會,劉輝航,王德成.彈簧手冊[M].北京:機械工業出版社,2008 Zhang Yinghui,Liu Huihang,Wang Decheng.Spring manual[M].Beijing:China Machine Press,2008(in Chinese)
[12]高濱,李忠剛,馬景.分離螺母的關鍵設計參數分析[J].航天返回與遙感,2001,22(2):63-65 Gao Bin,Li Zhonggang,Ma Jing.Analyses of key design parameters for separation nuts[J].Spacecraft Recovery&Remote Sensing,2001,22(2):63-65(in Chinese)
(編輯:張小琳)
Design and Experiment of a Hold-down&Release Device Using Shape Memory Alloy Wires
LIU Ying1YANG Qiaolong1YAN Zehong1ZHANG Xiaoyong2YAN Xiaojun2
(1 Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
(2 School of Jet Propulsion,Beihang University,Beijing 100191,China)
This paper promotes a hold-down and release device which uses SMA wire as an actuator,groups rollers to decrease friction and initiatively controls small clearance(≤0.05mm).In this paper,in view of the engineering requirement,a design method is proposed,which gives the relationship between unlocking resistance and restoring force,and an analysis of critical parameters is conducted.The result shows that when the preload is 12000N,the device release time is 7.6s under—15℃vacuum environment with 2 A current.Compared with the measured result,the calculation error of release time and restoring motion are less than 5%.The device developed in this paper has the advantage of simple structure,low power consumption and small gap in seal face,and can be used in delicate deployable mechanism.
SMA;small clearance;hold-down and release device
V47
A
10.3969/j.issn.1673-8748.2016.03.006
2016-03-15;
2016-04-28
國家重大航天工程
劉穎,男,工程師,研究方向為航天器機構產品設計。Email:402114851@qq.com。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04