載人小行星著陸探測模式設想
2016-09-08 03:20:34武江凱白明生茍仲秋中國空間技術研究院載人航天總體部北京100094
航天器工程 2016年3期
關鍵詞:活動
武江凱 白明生 茍仲秋 閆 鑫(中國空間技術研究院載人航天總體部,北京 100094)
載人小行星著陸探測模式設想
武江凱白明生茍仲秋閆鑫
(中國空間技術研究院載人航天總體部,北京 100094)
基于目前小行星探測技術特點,綜述了當前國內外空間活動中兩種典型探測模式,針對未來載人小行星著陸探測需求,提出了爬行式和基于小型機動操作載人飛船的兩種探測模式,并對兩種模式進行評價比較,基于小型機動操作載人飛船的探測模式具有機動性強、探測范圍廣、安全性高及對航天員操作能力要求低等特點,可為我國未來載人深空探測任務中微重力環境下星體表面作業方案設計提供參考。
載人小行星探測;微重力;著陸探測;小型機動操作載人飛船
1 引言
小行星(Asteroid)是太陽系內類似行星環繞太陽運動,但體積和質量比行星小得多的天體。而近地小行星(Near Earth Asteroid,NEA)由于其運行軌道與地球相近,探測任務的規模和難度都相對較小,越來越成為載人深空探測的焦點。近年來主要航天國家競相開展了小行星探測任務,截至目前,人類共發射了11艘無人探測器對小行星進行了探測[1],日本隼鳥號探測器于2005年11月12日著陸到小行星25143(Itokawa,1998 SF36),開始了人類首次對小行星的樣品采集任務;2012年12月13日,我國嫦娥-2深空探測器完成了與圖塔蒂斯(Toutatis)小行星的飛越探測;最近一次為美國黎明號探測器于2015年3月6日對谷神星開始的環繞探測,實現了人類對小行星帶區域的首次探測。美國洛馬公司“移民石”(Plymouth Rock)計劃作為人類的第一個載人小行星探測計劃,從一開始就備受關注,該計劃將通過航天員對小行星的地質特性和人類對小行星環境的適應能力進行研究,尋找人類可利用的礦物資源,同時,將小行星作為登陸火星和其他行星的補給站,通過載人小行星探測提前驗證未來載人深空探測的關鍵技術,為人類向更遠的深空探測做技術儲備和驗證,“移民石”計劃的提出,大大地加快了世界航天事業向載人小行星探測領域邁進的步伐[2]。
根據目前人類對小行星的認識和了解,小行星由于具有外形不規則、體積小、質量輕、轉速慢等特點,能夠提供的引力加速度幾乎為零[3],航天員在其表面行走和作業將類似于太空漫游,面臨著極高的風險,因此,有必要設計合理的著陸探測模式,以保證航天員安全地完成對小行星進行現場考察、科學儀器的布置、取樣初步辨識等復雜的探測任務。
本文對載人小行星著陸探測任務特點進行了研究,對航天員艙外活動特點和難點進行了分析,根據小行星地質結構特點,提出了表面爬行和基于小型機動操作載人飛船兩種載人小行星著陸探測模式的設想,旨在為未來載人小行星著陸探測提供參考。
2 艙外活動概述
為了更直接地進入空間、更深入地認識空間以及更有效地利用空間,自從第一艘載人飛船升空以來,人類便一直努力探索著太空這個未知的世界,1965年蘇聯航天員阿里克謝·列昂諾夫走出了上升2號飛船,是人類的第一次艙外活動(Extravehicular Activity,EVA),艙外活動定義見參考文獻[4]。截至目前,人類從事的艙外活動主要可分為2類,軌道基艙外活動和星體表面基艙外活動[4]。
2.1軌道基艙外活動
所謂軌道基艙外活動是指出艙所處的場所為地球或其他天體附近的軌道上,到目前為止,已經進行的艙外活動中,絕大多數都是軌道基艙外活動,而且幾乎都是在高300~600km范圍的近地軌道上進行的,如“國際空間站”上航天員出艙進行維修、組裝,航天飛機上航天員維修“哈勃望遠鏡”等。
在近地軌道空間,除了真空環境外,最突出的特殊條件就是失重,航天員和艙外活動中所使用的物體都處于失重狀態。雖然失重環境因素消除了艙外航天服、操作對象以及航天員自身重量的影響,卻大大增加了航天員空間移動和空間操作的難度,使航天員在艙外活動中消耗更多的體力和精力。為此,航天員必須通過雙手借助航天器艙壁外的扶手等進行空間行走,或借助機動裝置(如艙外機動單元、空間機械臂等)實現空間移動,操作維修期間必須依靠腳限位器、束縛帶和助力裝置來幫助固定身體,維持姿勢和發力操作如圖1所示。此外,在早期艙外活動中還須要通過安全系繩來保證航天員與母體探測器之間及工作場地之間的連接[4]。
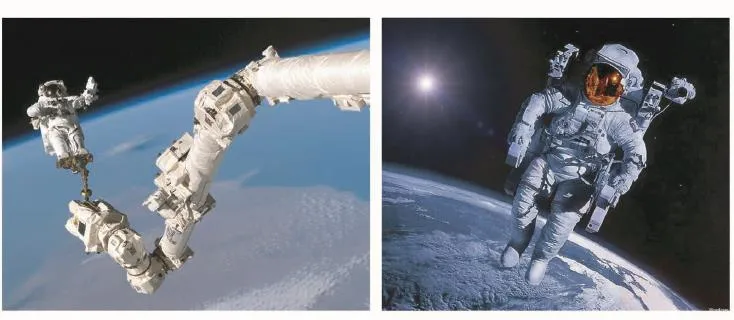
圖1 近地軌道艙外活動Fig.1 Extravehicular activity in low earth orbit
由于受到地球磁場影響,近地軌道空間輻射水平和微流星體密度較低,航天員進行艙外活動時,可能受到的空間輻射和微流星體傷害的風險不是很高,因此軌道基艙外活動對艙外航天服的輻射防護和微流星體防護功能的要求并不高,如果考慮在遠地軌道甚至更高的深空探測中進行艙外活動,則必須對艙外航天服的輻射防護和微流星體防護功能提出更高的要求。
2.2星體表面基艙外活動
1969年7月20日,美國的阿波羅11號飛船的登月艙在月球著陸,這是人類的首次地外星體表面基艙外活動,“阿波羅”計劃載人月球探測任務中,先后6次共12人登上了月球,為人類地外星球探測提供了豐富的經驗。
月球作為人類唯一到達的地外星球,月表重力相當于地球表面的1/6,因此,在月球表面進行艙外活動,航天服在提供環控生保能力、抵抗空間輻射和微流星體的同時,也給航天員帶來了較大的重力負荷,質量約120kg的艙外航天服給艙外活動的航天員帶來了沉重的體力負荷,使之難以適應在月表上長時間行走,而須要借助必要的工具,因此從阿波羅15號飛船開始,登月的美國航天員使用了“月球車”,使他們在月球上的活動范圍擴大到數十千米,大大減輕了航天員的體力負荷,明顯提高了航天員在月表上的艙外活動效率,如圖2所示[5]。
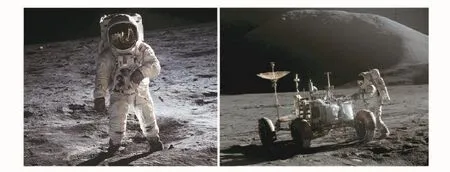
圖2 月表艙外活動Fig.2 Extravehicular activity on surface of moon
3 載人小行星著陸探測模式設計
3.1載人小行星著陸探測特點
根據參考文獻[6],載人小行星探測器脫離地球引力后,進入日心轉移軌道,通過一次軌道機動,進入對小行星的伴飛軌道,向小行星表面投放信標機,建立與探測小行星的位置與姿態保持,通過航天員出艙,開展對小行星的探測[6]。
由于小行星星體表面重力加速度的大小與星體的質量及其直徑直接相關。大多數小行星直徑都小于100km,遠遠小于月球、地球和火星的直徑,作為巖石質的天體,其質量也比月球小得多。因此,小行星上的引力幾乎可以忽略不計,無法提供航天員正常行走需要的重力環境[7-8],同時,作為一個非合作的探測目標,小行星表面地理環境復雜,無法提供扶手、腳限位器等輔助行走設備。因此,除了須要為航天員配置常規的裝置以外,還須要設計合理的著陸探測模式,確保航天員順利安全地完成探測任務,本文以參考文獻[6]中探測任務為例,開展了表面爬行和基于小型機動操作載人飛船的兩種著陸探測方式設計研究。
3.2表面爬行模式
探測器在安全距離內,與小行星進行精控伴飛,在小行星自轉軸方向10m處進行懸停,利用拋射器拋出著附網,并通過錨機構將網的4個角固定在小行星表面,航天員身著艙外航天服,并配置安全系繩與母體探測器連接,通過下降梯降至小行星表面,沿著附網爬行,完成科學設備布置、巖石采樣等任務,為了防止因錯誤操作使航天員飄離小行星表面,出現危險狀態,在移動過程中,須要通過安全掛鉤保證航天員與著附網之間的可靠連接,如圖3所示[2],由于著附網為柔性物質,在小行星表面的附著性比較強,探測結束后,著附網可多次重復使用。
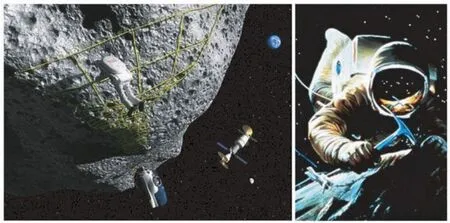
圖3 表面爬行模式圖示Fig.3 Crawl mode for extravehicular activity
3.3基于小型機動操作載人飛船的著陸探測
基于小型機動操作載人飛船的著陸探測思路,主要來源于早期軌道基艙外活動中的艙外機動單元,如圖4所示,小型機動操作載人飛船(Small Maneuver Operational Manned Spacecraft,SMOMS)除具備載人飛船常規的環控生保、姿態與軌道控制、信息管理、熱管理、電源電路、儀表顯示和照明等功能以外,最大的特點是配置了小行星抓捕機械臂和任務操作機械臂,航天員乘坐在飛船內部,通過操縱兩個機械臂實現對小行星抓捕功能和表面操作。
探測器飛往小行星過程中,小型機動載人飛船與母體探測器連接,由母體探測器進行統一控制,與小行星精控伴飛期間,首先對小型機動載人飛船功能狀態進行檢測,檢測正常后,航天員身著艙內航天服從母體探測器進入小型機動載人飛船后,關閉艙門,再次由飛船進行功能自檢,自檢無誤后,在航天員操縱下與探測器分離。
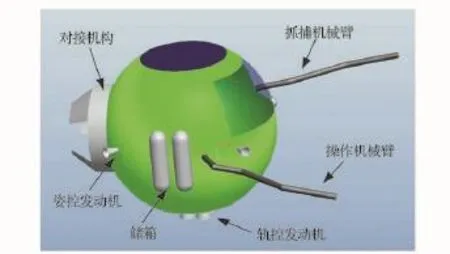
圖4 小型機動操作載人飛船構型圖Fig.4 Small maneuver operational manned spacecraft configuration
小型機動載人飛船通過姿軌控功能繞小行星自轉軸公轉,采用與小行星自轉角速度相同的公轉角速度,保持與小行星的近距離相對靜止懸停,由兩個機械臂協同完成復雜的探測任務,抓捕機械臂主要完成對小行星的抓捕和連接,二者形成剛性連接后,小型機動載人飛船姿軌控停控;表面操作機械臂是小行星探測任務的主要執行者,在航天員操作下,完成一系列的操作探測。任務完成后,與母體探測器對接,航天員返回母體探測器內,完成一次探測任務。
4 著陸探測模式評價與比較
4.1表面爬行模式
表面爬行模式中涉及的系統主要包括著附網系統和錨機構,系統規模簡單、較小,可靠性較高;航天員在軌爬行動作,可通過在地面以及近地空間軌道上進行訓練實現,爬行過程中,通過安全系繩等手段實現與著附網、目標星體之間的連接,故障情況下,通過與母體探測器之間的安全系繩返回,具有較高的安全性;表面爬行技術繼承了當前軌道基艙外活動技術,可充分借鑒近地空間出艙維修和技術,繼承性好;由于著附網面積以及失重條件下航天員體能限制,表面爬行模式的探測范圍以及機動性將大打折扣,但航天員在小行星表面移動過程中,須要克服小行星自轉運動帶來的離心力作用,以及在科學任務期間操作反作用力對航天員的影響,表面爬行探測模式關鍵技術主要包括:
(1)精控伴飛與懸停技術:對非合作目標小行星的測量、交會、接近、伴飛及懸停控制技術;
(2)真空拋射與捕獲技術,真空環境條件下,定向拋射著附網對小行星進行成功捕獲技術;
(3)錨機構定位技術,在小行星表面著附過程中,錨機構(見圖5)與小行星之間的剛性連接技術[9-11]。
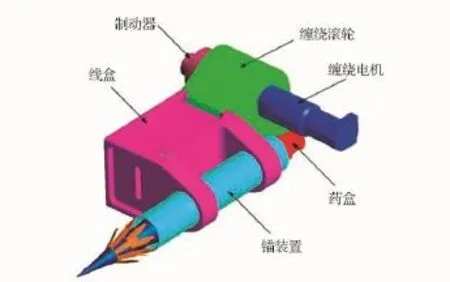
圖5 錨機構示意圖Fig.5 Anchor configuration
4.2基于小型機動操作載人飛船的探測模式
基于小型機動操作載人飛船的探測模式,可以使航天員靈活地往返于母體探測器與小行星之間,極大程度上減少了航天員在小行星表面爬行過程中的體力消耗和風險,同時由于利用推力器進行移動,機動性較強,且可擴大航天員探測范圍。
小型機動操作載人飛船可基于目前較成熟的近地空間載人航天器進行改進設計,增加機械臂抓捕和操作功能,因此該探測模式具有較好的繼承性。由于整個探測過程中都是由機械臂來完成具體操作,因此只需對航天員進行艙內遙操作技能訓練。在完成所有探測任務之后,飛船與母體探測器進行交會對接,航天員回到母體探測器內,小型機動操作載人飛船還可以與母體探測器分離,繼續留軌使用,對小行星進行精確軌道跟蹤、引力和輻射環境測量,及完成航天員訪問期間沒有來得及完成的延續任務。
飛船軌控系統故障情況下,無法主動完成交會對接時,可作為被動目標,由母體探測器完成抓捕對接任務,基于小型機動操作載人飛船探測模式關鍵技術主要包括:
(1)小型機動操作載人飛船總體設計技術;
(2)精控伴飛與懸停技術,對非合作目標小行星的測量、交會、接近、伴飛以及懸停控制技術;
(3)非合作目標抓捕及組合體控制技術,對非合作目標小行星的抓捕過程中碰撞、沖擊分析技術以及形成組合體后姿態控制技術;
(4)人機聯合操作技術,對非合作目標小行星抓捕、操作過程中人機協同操作技術。
對兩種著陸探測模式的比較見表1。
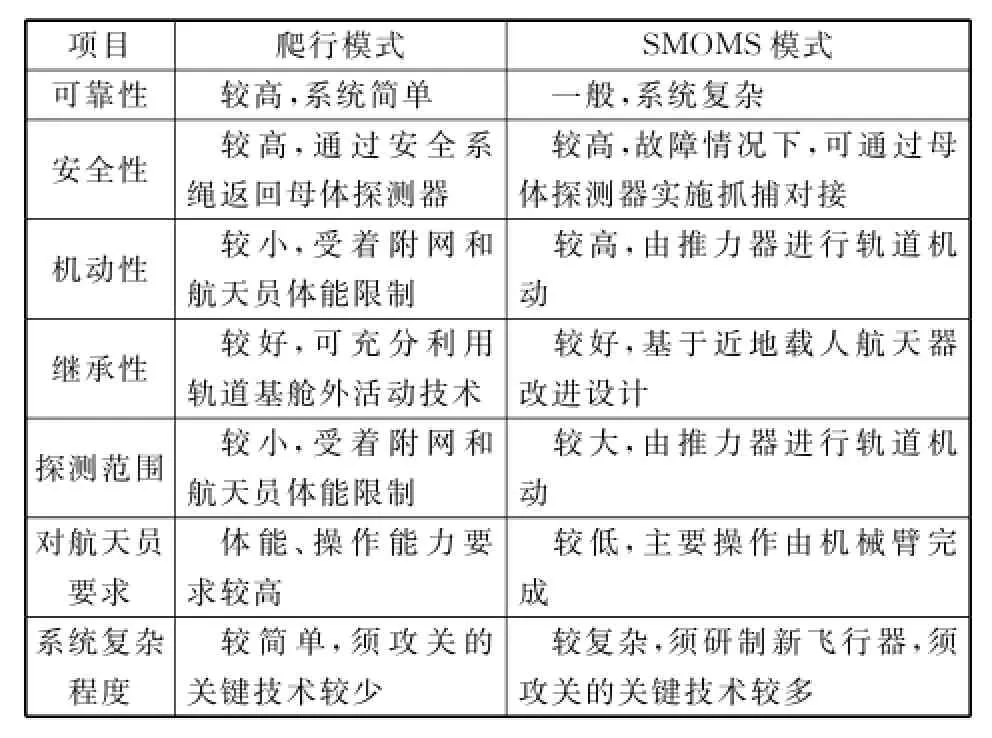
表1 兩種著陸探測模式比較Table1 Comparison between two exploration modes
5 結束語
針對未來的載人小行星探測任務,根據小行星所處的環境條件及其表面特殊的物理特征,本文提出了表面爬行和基于小型機動操作載人飛船的2種著陸探測模式,分別對2種探測模式關鍵技術進行梳理和初步分析,對兩種模式的優缺點進行比較分析,后續將重點對小型機動操作載人飛船系統進行方案研究。本研究可以為未來載人小行星著陸探測活動或其他微重力環境下表面作業方案提供參考。
(References)
[1]東方星.悄然興起的小行星探測熱潮[J].太空探索,2013(5):28-31 Dongfang Xing.Quiet rising of asteroid exploration upsurge,space exploration[J].2013(5):28-31(in Chinese)
[2]武江凱,白明生.美國“移民石”計劃最新進展[J].國際太空,2013(7):38-44 Wu Jiangkai,Bai Mingsheng.The latest progress of American Plymouth Rock plan[J].Space International,2013(7):38-44(in Chinese)
[3]徐偉彪,趙海斌.小行星深空探測的科學意義和展望[J].地球科學進展,2005,20(11):1183-1190 Xu Weibiao,Zhao Haibin.Deep space exploration of asteroids:the science perspectives[J].Advances In Earth Science.2005,20(11):1183-1190(in Chinese)
[4]黃偉芬.航天員出艙活動概論[M].北京:國防工業出版社,2008Huang Weifen.An introduction of astronaut extravehicular activity[M].Beijing:National Defense Industry Press,2008(in Chinese)
[5]陳善廣.航天員出艙活動技術[M].北京:中國宇航出版社,2007 Chen Shanguang.Technology for astronaut extravehicular activity[M].Beijing:China Astronautics Press,2007 (in Chinese)
[6]王開強,李志海,張柏楠.載人小行星探測的飛行模式[J].載人航天,2014,20(1):89-94 Wang Kaiqiang,Li Zhihai,Zhang Bainan,Mission mode of the human asteroid exploration[J].Manned Spaceflight.2014,20(1):89-94(in Chinese)
[7]朱恩涌.小行星表面取樣技術分析[J].中國航天,2012 (2):32-35 Zhu Enyong.Technology analysis of sampling on asteroid[J].Aerospace China,2012(2):32-35(in Chinese)
[8]王開強,張柏楠,王悅.載人小行星探測的任務特點與實施途徑探討[J].航天器工程,2014,23(3):105-121 Wang Kaiqiang,Zhang Bainan,Wang Yue.Characters and technological approach of human asteroid exploration mission[J].Spacecraft Engineering,2014,23(3): 105-121(in Chinese)
[9]龔勝平,李俊峰,寶音賀西.小天體伴飛脈沖控制[J].中國空間科學技術,2013(3):15-21 Gong Shengping,Li Junfeng,Baoyin Hexi.Impulse control for spacecraft near asteroid[J].Chinese Space Science and Technology,2013(3):15-21(in Chinese)
[10]張偉.深空探測器總體技術[J].上海航天,2013,29 (6):1-6 Zhang Wei.General technology of deep-space probe [J].Aerospace Shanghai,2013,29(6):1-6(in Chinese)
[11]趙志軍,趙京東.小行星探測器錨系統及其實驗研究[J].南京航空航天大學學報,2013,45(4):461-466 Zhao Zhijun,Zhao Jingdong.Development and experimental analysis of anchoring system for asteroid lander [J].Journal of Nanjing University of Aeronautics& Astronautics,2013,45(4):461-466(in Chinese)
(編輯:李多)
Tentative Modes for Human Asteroid Landing Exploration
WU Jiangkai BAI Mingsheng GOU Zhongqiu YAN Xin
(Institute of Manned Space System Engineering,China Academy of Space Technology,Beijing 100094,China)
Based on the characteristic of asteroids exploration technology,the paper reviews two typical exploration modes.For the requirement of future human asteroid landing exploration,it puts forward crawl mode and small maneuver operational manned spacecraft based mode.Compared with the crawl mode,the small maneuver operational manned spacecraft based mode has higher maneuverability,wider explorative area,higher security and lower handle ability requirement for astronaut,which can provide future manned deep space explorations with a reference for manipulation on celestial body surface where is micro gravitation.
human asteroid exploration;micro gravitation;landing exploration;small maneuver operational manned spacecraft
V476.4
A
10.3969/j.issn.1673-8748.2016.03.017
2015-12-09;
2015-12-30
武江凱,男,工程師,從事載人航天器總體設計工作。Email:wjk1958@126.com。
猜你喜歡
齊魯師范學院學報(2022年5期)2022-10-13 10:04:18
少先隊活動(2022年5期)2022-06-06 03:45:04
家庭科學·新健康(2022年3期)2022-05-10 00:32:13
天津音樂學院學報(2021年4期)2022-01-08 02:18:52
中老年保健(2021年2期)2021-08-22 07:31:10
少先隊活動(2021年1期)2021-03-29 05:26:36
快樂語文(2020年30期)2021-01-14 01:05:38
海峽姐妹(2018年3期)2018-05-09 08:20:40
質量與標準化(2015年8期)2015-07-18 11:11:08
質量與標準化(2015年12期)2015-07-10 15:11:50