高速公路勘測中車載激光點云高精度校正可行性分析
2016-09-08 02:11:16魏國忠吳學超
測繪通報 2016年8期
魏國忠,侯 飛,張 衡,吳學超
(山東省國土測繪院,山東 濟南 250013)
?
高速公路勘測中車載激光點云高精度校正可行性分析
魏國忠,侯飛,張衡,吳學超
(山東省國土測繪院,山東 濟南 250013)
目前車載移動測量系統在公路勘測方面的用途日益顯著。本文闡述了車載激光點云數據的獲取原理,對車載移動測量系統的誤差進行了估計,并分析了一定時間和距離內誤差傳播的規律,論證了利用靶標控制點對車載激光點云數據進行高精度校正的可行性,最后通過高速公路改擴建項目實例對可行性進行了驗證。
車載激光點云;靶標控制點;高精度校正;高速公路改擴建
隨著國內車載移動測量設備和技術的日益成熟,車載移動測量系統被嘗試應用于公安、交通、市政等各個領域,特別是在交通領域,如高速公路改擴建,車載移動測量具有成本低、機動靈活的優勢[1-2]。車載激光點云數據為高速公路勘測提供了詳盡、連續的參考數據,信息豐富,成果多用。但同時,高成本和高風險的高速公路改擴建項目對車載激光點云的精度有著十分苛刻的要求,對車載移動測量系統等高精尖設備在公路勘測中的應用提出巨大挑戰[3]。
本文從這一現實出發,通過闡述車載激光點云數據的獲取原理,并對車載移動測量系統的誤差進行分析,從而總結出一定距離和時間段內誤差傳播規律,論證了利用靶標控制點對車載激光點云數據進行高精度校正的可行性,最后通過銀川高速公路改擴建項目實例對校正的可行性進行了驗證,為車載移動測量系統在高速公路勘測中的應用提供了理論支持和經驗借鑒。
一、坐標系及其變換
移動測量系統在計算空間點云坐標的過程中,主要涉及4個坐標系之間的轉換,即激光掃描儀坐標系、慣導平臺參考坐標系、當地水平坐標系、WGS-84大地坐標系[4]。影響測量系統精度的誤差源主要包含激光測距誤差、系統安裝角度誤差、姿態角度誤差、GNSS定位誤差和桿臂向量誤差等[5]。
1. 掃描點在激光掃描參考坐標系中的坐標
激光掃描坐標系是以激光發射參考點為原點,Z軸垂直于安置底座向上,X軸與Z軸垂直并構成激光掃描平面,Y軸按照右手法則垂直于掃描平面,如圖1所示,激光掃描角θ按照Z軸正向順時針旋轉得到。
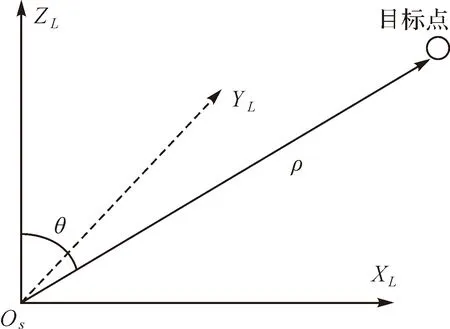
圖1 激光掃描儀坐標系
假設激光參考點與被測目標點之間準確距離為ρ,激光距離誤差為Δρ,則考慮激光掃描誤差時在激光掃描儀坐標系中的被測目標點的坐標(XL,YL,ZL)應滿足
(1)
2. 激光掃描參考坐標系至慣性平臺參考坐標系
IMU傳感器幾何中心為慣性參考系坐標原點,以移動載體前進方向為Y軸正向,垂直向上為Z軸正向,X軸滿足右手法則;安置激光掃描儀與IMU系統時,會導致激光掃描參考坐標系與慣導平臺參考坐標系之間存在坐標中心的偏移及3個坐標軸的旋轉;假定坐標原點偏移的桿臂向量3個方向分別為lX、lY和lZ,三軸旋轉角度為橫滾方向ω、俯仰方向φ和航向方向κ,如果進一步考慮兩坐標系之間的安置角度誤差Δω、Δφ和Δκ及桿臂向量誤差ΔlX、ΔlY和ΔlZ,則激光測量點在慣性平臺參考坐標系中的坐標(XI,YI,ZI)滿足
(2)
式中,RM為安置角旋轉矩陣;E為單位矩陣;ΔRM為安置誤差角旋轉矩陣,當誤差角滿足小角時,滿足
(3)
3. 慣性平臺參考坐標系至當地水平參考坐標系
當地水平坐標系又稱站心坐標系,假定IMU測定的3個姿態角為橫滾角r、俯仰角p和航向角y,姿態角誤差分別為橫滾方向Δr、俯仰方向Δp和航向方向Δy。則考慮姿態角誤差時激光測量點轉換至當地水平參考系的坐標(XH,YH,ZH)滿足
(4)
式中,RZ為姿態角旋轉矩陣;E為單位矩陣;ΔRZ為姿態誤差角旋轉矩陣,當誤差角滿足小角時,滿足
(5)
4. 當地水平參考坐標系至WGS-84坐標系
當地水平參考系可以通過旋轉平移轉換到地心地固的WGS-84系中,假定GNSS的相位中心為(XG,YG,ZG),在WGS-84下的經緯度分別為L和B,GNSS定位誤差為(ΔXG,ΔYG,ΔZG),則考慮到定位誤差時,當地水平坐標系激光掃描點在WGS-84坐標系下的空間直角坐標(XE,YE,ZE)滿足
(6)
式中,RE為坐標旋轉矩陣。綜上所述,測量點從激光掃描儀坐標系轉換至WGS-84坐標系滿足式(7),如果加入前述激光測距誤差、系統安裝角度誤差、姿態角度誤差、定位誤差和桿臂向量誤差影響時,測量點坐標在WGS-84地心地固坐標系中滿足式(8)。
(7)
(8)
二、激光點云高精度校正的可行性分析
隨著車載移動測量系統中核心傳感器技術的發展,中高端激光掃描儀的測距精度一般都優于1 cm,POS系統與激光掃描儀的桿臂向量和安置角精度分別可以達到毫米以下量級和0.01°量級,而POS系統輸出的俯仰角和橫滾角精度可達0.005°,航向角精度可達0.008°[6]。
文中所使用測量系統激光測距精度為5 mm,相對于激光測距誤差,桿臂向量誤差可以忽略;POS系統的姿態角精度為0.08°,因此0.01°量級的安置角誤差相對比POS姿態誤差可以忽略。因此,測量系統的點云精度將主要由GNSS定位誤差、激光測距誤差和POS姿態角誤差決定。通常情況下,水平和高程方向上的誤差應在高斯平面直角坐標系中進行分析,即將式(8)中激光點云坐標進行高斯投影,并分別對平面和高程方向坐標進行微分運算。或者可以直接由式(4)將當地水平坐標系近似轉換為高斯平面直角坐標系,主要在平面方向受航向角和子午線收斂角影響有一個旋轉角。因此,對于較小面積的測區,可以將系統測量的激光點云平面和高程誤差近似在當地水平參考坐標系中表達和分析[7]。根據式(4)將X、Y和Z各項誤差因素取偏微分方程,則有如下形式
(9)

選取車載系統在高速公路運行的一段實際測量數據,其俯仰、橫滾角在0°至5°之間,利用式(9)計算車輛在行駛過程中其中一幀線掃描數據由于姿態角隨機誤差導致的激光點云高程方向誤差,如圖2所示。圖2中橫軸為掃描儀垂直方向掃描角,以掃描儀坐標系Z軸反向為0°,逆時針為正向,其中掃描距離選用在高速公路測量時的最大值20m,姿態隨機誤差使用該段時間內姿態角誤差絕對值的平均值。
通過圖2可以看出,掃描角在10°左右時高程方向誤差達到最大值,約為0.51cm,當掃描角固定為10°,即高程方向取得最大誤差掃描角度時,由實時的姿態隨機誤差導致的整條測線高程誤差曲線如圖3所示。
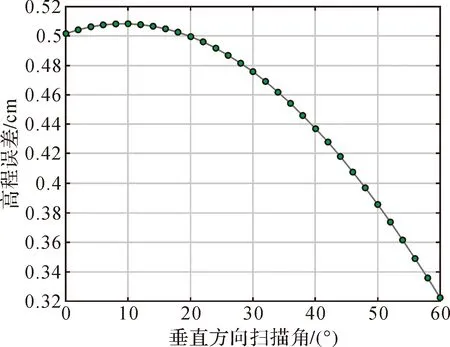
圖2 不同掃描角時姿態隨機誤差導致的高程誤差
通過圖3可以看出,在接近2h的整條高速公路測線測量中,車載激光掃描系統由于姿態隨機誤差導致的高程誤差約為0.5cm。
為了分析在一定區間內GNSS定位誤差對點云精度的影響,以動態方式測量沿線布設的12處特征點坐標,長度約700m,往返重復測量60次,點位坐標采用WGS-84坐標系統,平面坐標使用UTM投影方式,其中所選位置平面方向和高程方向重復測量相對精度見表1。
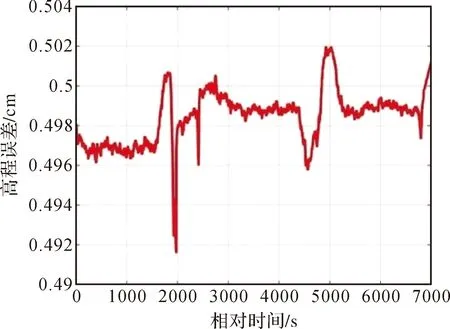
圖3 特定掃描角下由姿態隨機誤差導致的整條測線高程誤差曲線
由表1可以看出,高程方向相對精度優于0.8cm,平面精度優于0.5cm,綜合考慮前一節的測距誤差、姿態角和安置角誤差對點云坐標誤差的影響,由于上述誤差是獨立的,根據誤差傳播方程,平面和高程方向的綜合誤差均小于1cm。
計算結果表明,在一定的區間內,對于校正后內符合性精度比較好的高精度車載移動測量設備,由隨機誤差導致的激光點高程誤差在1cm以內。在一定的時間和距離區間內GNSS星地幾何關系、衛星數目、DOP精度因子[8]變化不大,在合理控制區間內,局部重力場[9]應變較小,區間內高程異常大小基本一致,可認為GPS絕對定位殘余系統偏差[10]也基本一致,除上文提到的隨機綜合誤差外,影響車載點云測量精度的殘余偏差表現為較強的系統性,因此,可以通過布設靶標控制點,以合理控制區間進行點云高精度NURBS曲線高程糾正,以減弱GNSS定位誤差、高程異常誤差等影響絕對位置精度的區間系統殘余偏差,從而滿足公路高精度勘測要求。
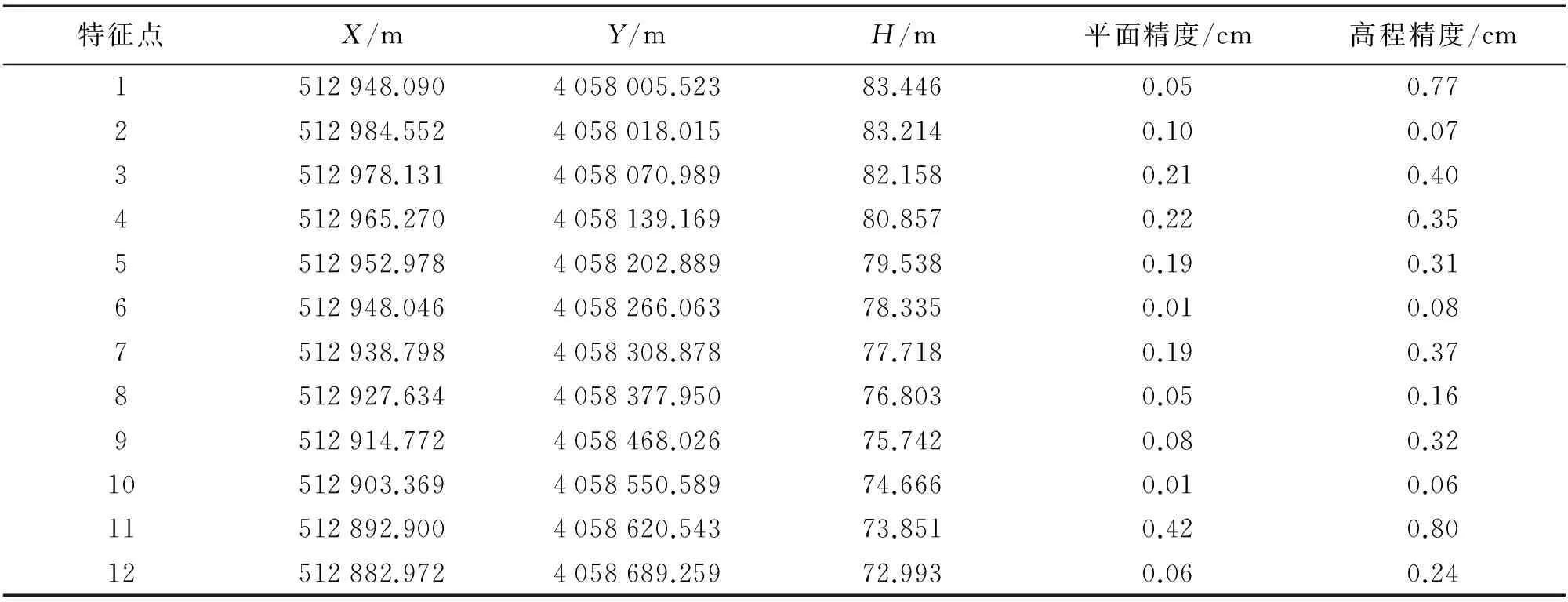
表1 GNSS重復測量特征點坐標及高程相對精度
三、車載激光點云在銀川公路改擴建中的應用
1. 銀川高速公路改擴建項目設計方案
銀川高速公路改擴建線路長約40 km,如圖4所示。為滿足高速公路改擴建要求,勘測數據高程中誤差要求控制在2 cm以內,平面中誤差在5 cm以內,粗差率控制在5%以內,同時為滿足投影長度變形不得大于2.5 cm/km的規范要求,投影高程抵償面設置為1000 m。
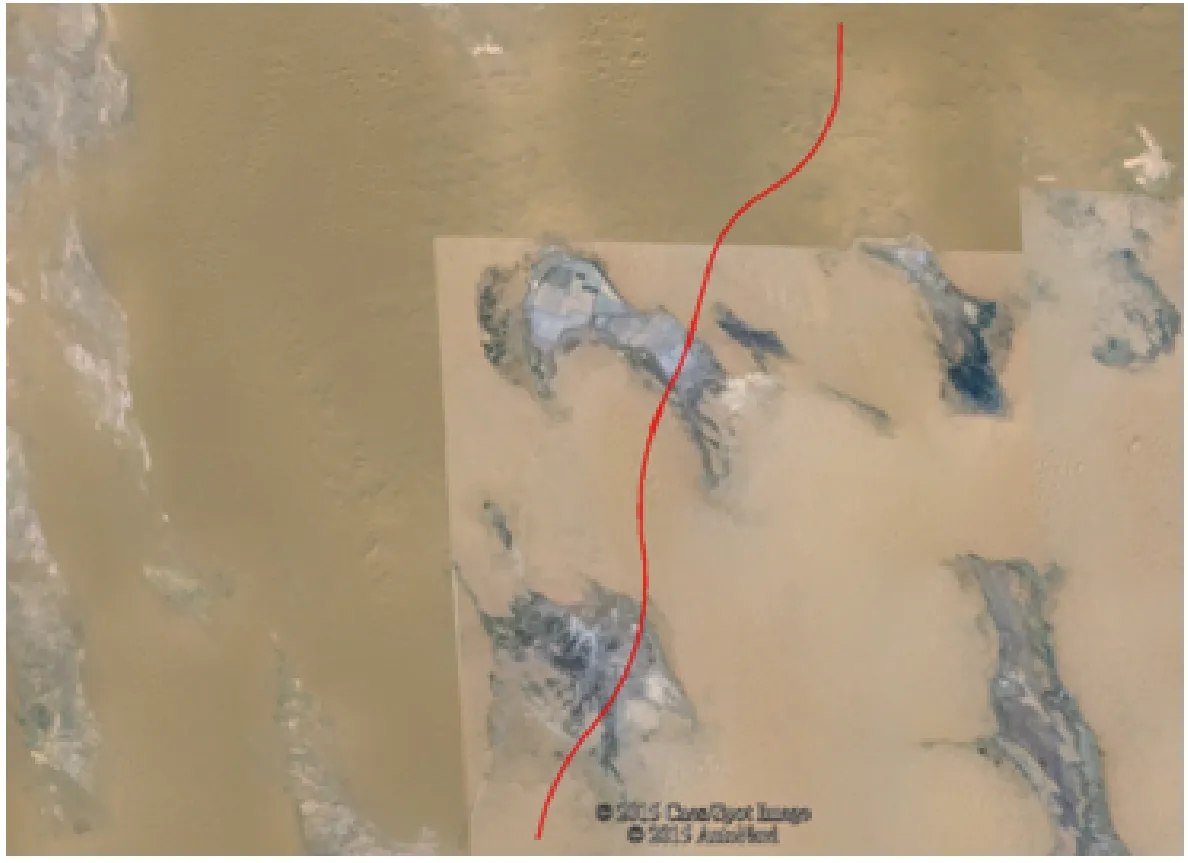
圖4 銀川公路改擴建路段
傳統設計方案是沿線布設一定密度的測量控制點,通過水準聯測獲取控制點的1985國家高程基準下高程值。通過GNSS聯測獲取控制點的平面坐標,然后在測量控制點上架設高精度全站儀測定道路的橫縱斷面圖及其他地形數據,工作量大,耗時較長。
本文將車載移動測量技術應用于高速公路改擴建項目中,同時為驗證車載激光點云高精度校正的可行性及獲取最佳布點方案,設計中沿高速公路兩側每200 m交錯布設靶標控制點,并以人工水準的方式獲取靶標控制點1985國家高程基準下高程值,以高精度RTK測量方式獲取靶標控制點的平面坐標。其次,采用內符合精度較好的北京四維公司的車載移動測量系統沿道路兩側進行點云獲取。數據處理時首先通過布爾莎模型將車載點云數據轉換到投影高程抵償面,然后采用芬蘭的Microstation點云插件分段進行車載點云數據的平面和高程校正。
2. 銀川高速公路車載點云精度統計與分析
為了根據車載移動測量的內符合性獲取最佳的靶標控制點布設方案,本文采用了不同間隔的靶標控制點校正方案。統計時根據點云強度值區分出靶標點云,并根據靶標幾何特征獲取靶標的中心位置坐標數據,如圖5所示,實測對比統計數據見表2。
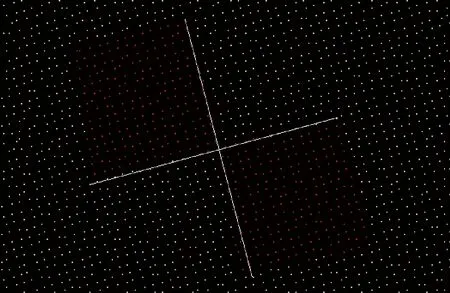
圖5 靶標控制測量點

控制點間隔無控制200m300m500m1000m高程粗差率0.20%3.80%6.40%16.30%剔除粗差前高程中誤差/m0.0460.0110.033剔除粗差后高程中誤差/m0.0110.015剔除粗差前平面中誤差/m0.0670.0340.042剔除粗差后平面中誤差/m0.0320.036
粗差率超過5%的部分方案,本文未予統計。由表2可以看出,300 m間隔的靶標控制方案既能夠提高車載點云的精度,滿足公路勘測要求,也可以在一定程度上節省人工,同時也是北京四維車載移動測量系統內符合精度的一種實踐體現。車載移動測量系統在銀川高速公路采集數據時基本保持40 km/h勻速行駛,因而本文用實例驗證了在一定時間和距離區間內,通過與自身內符合精度相適應的靶標控制方案進行車載點云高精度校正的可行性。
四、結束語
本文從理論上對車載移動測量系統數據獲取原理進行了闡述,并估計和分析了車載移動測量誤差,論證了利用靶標控制點分段進行車載激光點云高精度校正的可行性,并通過實例驗證了基于靶標控制點進行車載激光點云高精度糾正的可行性,為高速公路勘測提供了新的思路,節省了人工,規避了高速作業風險,具有借鑒價值。
[1]張成.車載移動掃描測量技術在公路設計中的應用[D].西安:長安大學, 2011.
[2]趙松,西勤,劉松林,等.基于回光強度的地面三維激光掃描儀測距誤差模型[J].測繪科學,2013(5):169-174.
[3]郭波, 屈孝志,黃先鋒,等.車載移動立體測量系統檢校及精度分析[J].激光與紅外,2011, 41(11): 1205-1210.
[4]何林,柳林濤,許超鈴,等.常見平面坐標系之間相互轉換的方法研究[J].測繪通報,2014(9):6-11.
[5]李鑫.車載移動測量系統誤差分析與檢校方法研究[D]. 鄭州:信息工程大學,2012.
[6]鄭德華,沈云中,劉春.三維激光掃描儀及其測量誤差影響因素分析[J].測繪工程, 2005,14(2):32-34.
[7]FILIN S. Recovery of Systematic Biases in Laser Altimetry Data Using Natural Surfaces [J]. Photogrammetric Engineering and Remote Sensing, 2003, 69(11):1235-1242.
[8]李建文,李作虎,周巍,等.衛星導航中幾何精度衰減因子最小值分析及應用[J].測繪學報,2011,40(5):85-94.
[9]陳俊勇.給定內插高程異常值的精度時對GPS水準網格間距的考慮[J].測繪學報,2003,32(2):38-41.
[10]劉忠,瞿偉,王少閩.利用半參數化模型精化GPS絕對定位中殘余的系統偏差[J].測繪工程,2007(5):29-30.
Analysis of High-accuracy Calibration Feasibility for Laser Point Cloud Scanned by Vehicle-borne Mobile Mapping System in Freeway Surveying
WEI Guozhong, HOU Fei, ZHANG Heng, WU Xuechao
10.13474/j.cnki.11-2246.2016.0248.
2015-08-11
測繪地理信息公益性行業科研專項(201412008)
魏國忠(1973—),男,高級工程師,主要研究方向為遙感數據獲取與處理。E-mail:weiguozhong@126.com
P234.4
B
0494-0911(2016)08-0020-05
引文格式:魏國忠,侯飛,張衡,等.高速公路勘測中車載激光點云高精度校正可行性分析[J].測繪通報,2016(8):20-24.
猜你喜歡
建材發展導向(2021年20期)2021-11-20 05:43:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國交通信息化(2016年9期)2016-06-06 07:42:10
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
