無控制點數據的無人機影像DOM快速制作
2016-09-08 02:11:20曹明蘭薄志毅李亞東
測繪通報 2016年8期
曹明蘭,薄志毅,李亞東,2
(1. 北京工業職業技術學院,北京 100042; 2. 北京林業大學精準林業北京市重點實驗室,北京 100083)
?
無控制點數據的無人機影像DOM快速制作
曹明蘭1,薄志毅1,李亞東1,2
(1. 北京工業職業技術學院,北京 100042; 2. 北京林業大學精準林業北京市重點實驗室,北京 100083)
在遇到緊急情況時,用戶對數字正射影像DOM成圖要求時間緊迫,需要最短時間成圖,無法投入過多人工干預。及時把握事件發生區域是采取有效應急措施并阻止事件擴散的可行辦法。本文利用無人機航測遙感系統采集案例地區的高空間分辨率影像,經攝影測量軟件快速處理并制作了1∶500數字正射影像圖,經精度檢查滿足DOM質量要求。該方法的實施效率高,數據采集成本低,能夠為某地區遇到緊急情況時提供技術支持。
無人機;低空攝影測量;無控制點;DOM
無人機(unmannedaerialvehicle,UAV)是自帶飛行控制系統和導航定位系統的無人駕駛飛行器[1-2],它具有飛行成本低、數據分辨率高、外業周期短、機動靈活等優點[3-4],在軍事和民用領域具有廣闊的應用前景[5]。但是在采用傳統方法進行內業數據處理時,需要到野外測量像片控制點,這大大拖延了無人機低空影像數據處理周期。為了滿足各類災害的應急救急工作的迫切需要,急需建立精度要求不高情況下的快速制作正射影像圖制作流程。近年來,隨著無人機攝影傳感器性能的提高,尤其是POS(positionandorientationsystem,POS)數據精度的不斷提升,使得無控制點處理無人機低空攝影測量數據成為可能。研究者們也從算法與軟件開發[6-8]、處理方法[9-12]、基于POS數據的影像匹配[13-15]等方面進行了探索。
本文利用測圖鷹X100無人機獲取了試驗地區高質量的低空影像數據,結合POS數據和無人機影像處理專業軟件,對基于全自動無人機航測系統的無控制點DOM快速制作關鍵技術進行了探討。
一、研究區概況
本次試驗于2014年6月19日在北京市平谷區峪口鎮進行。測區南北長約0.35km,東西寬約0.63km,測區面積0.22km2。測區內有樓房、平房、體育場、水域、道路、農田、樹木等建(構)筑物和人工設施。當天天氣晴朗,風力小于2級。飛行區域地勢平坦,側風飛行。
二、技術流程
無人機獲取的影像像幅小、數量多,飛行軌跡不規則,部分偏離航線較遠,直接導致影像間的重疊率相差較大。由于采用了非量測型普通數碼相機,加上飛行姿態不穩定,鏡頭畸變較大,影像內部幾何關系比不穩定。因此,無人機影像處理不能采用傳統基于嚴密標定系數和高精度控制點的內定向、相對定向、空三加密、DOM生成等一系列步驟。而且在應急應用中,快速獲取測區正射影像或準正射影像是首要任務,而精確定位無人機影像圖的絕對位置精度不是最重要的。因此,本文提出無人機低空影像無控制點數據的DOM制作思路,不做嚴密的平差處理,快速獲取整個飛行區域的正射影像圖,其處理流程如圖1所示。

圖1 無人機影像處理流程
三、關鍵技術
1. 外業航拍
(1) 設備參數
測圖鷹X100航測遙感無人機系統是一套可單人操作的全自動無人機航測系統,主要包含電動無人機飛行平臺、彈射起飛系統、eBox(GPS+INS自主巡航控制系統等)、小型數碼航攝儀、地面站控制系統及空地通信數據鏈組件。測圖鷹X100主要性能指標見表1和表2。
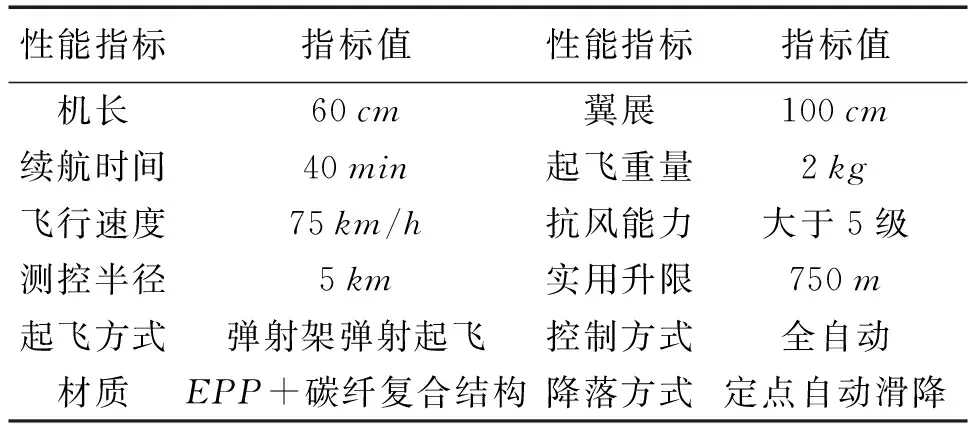
表1 無人機遙感平臺主要性能指標
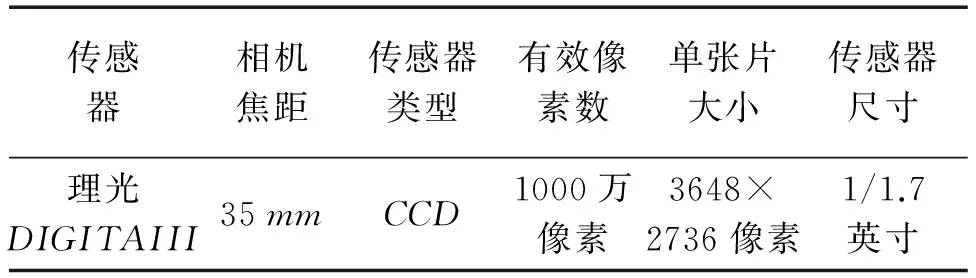
表2 無人機遙感傳感器主要性能指標
(2) 航攝設計
1) 航高和航飛確定。航飛前進行現場踏勘,檢查測區基準面情況,確定起飛區域和降落區域沒有障礙物,并確定起降點。需要考慮測區內有樓房、平房、體育場、水域、道路、農田、樹木等建構筑物和人工設施。為精確測定每一種地物,成圖比例尺確定為1∶500,地面分辨率確定為0.067 313 6m/像素。同時,考慮到飛行區域地勢平坦,根據《低空數字航空攝影規范》要求,將飛行航高確定為220m。航線規劃8條航帶,航向和旁向重疊率均設計為80%,航線間距為74m,航線規劃如圖2所示。航飛當天天氣晴朗,風力小于2級,設計側風飛行,逆風起飛,逆風降落。飛行1個架次,飛行面積為0.467 5km2,共獲取120張大小為3.5GB左右的影像。完成飛行任務后,導出照片和POS數據,檢查航向重疊、旁向重疊、像片傾斜角、航偏角、航線彎曲度、航高差、航攝漏洞等是否滿足設計要求。經過檢查,各項指標均滿足要求,航片影像清晰、反差適中、色調飽和不偏色、層次感適中、目視效果良好。

圖2 案例地區航線規劃
2) 無人機姿態角。無人機在空間上的飛行姿態角可以用像空間坐標系相對于地面輔助坐標系的轉動關系來表示。假設兩個坐標系的原點在同一位置,只是方向不同,則可通過3次不同方向的連續轉動使二者重合,每次轉動角即為姿態角,包括俯仰角、橫滾角、偏航角,如圖3所示。
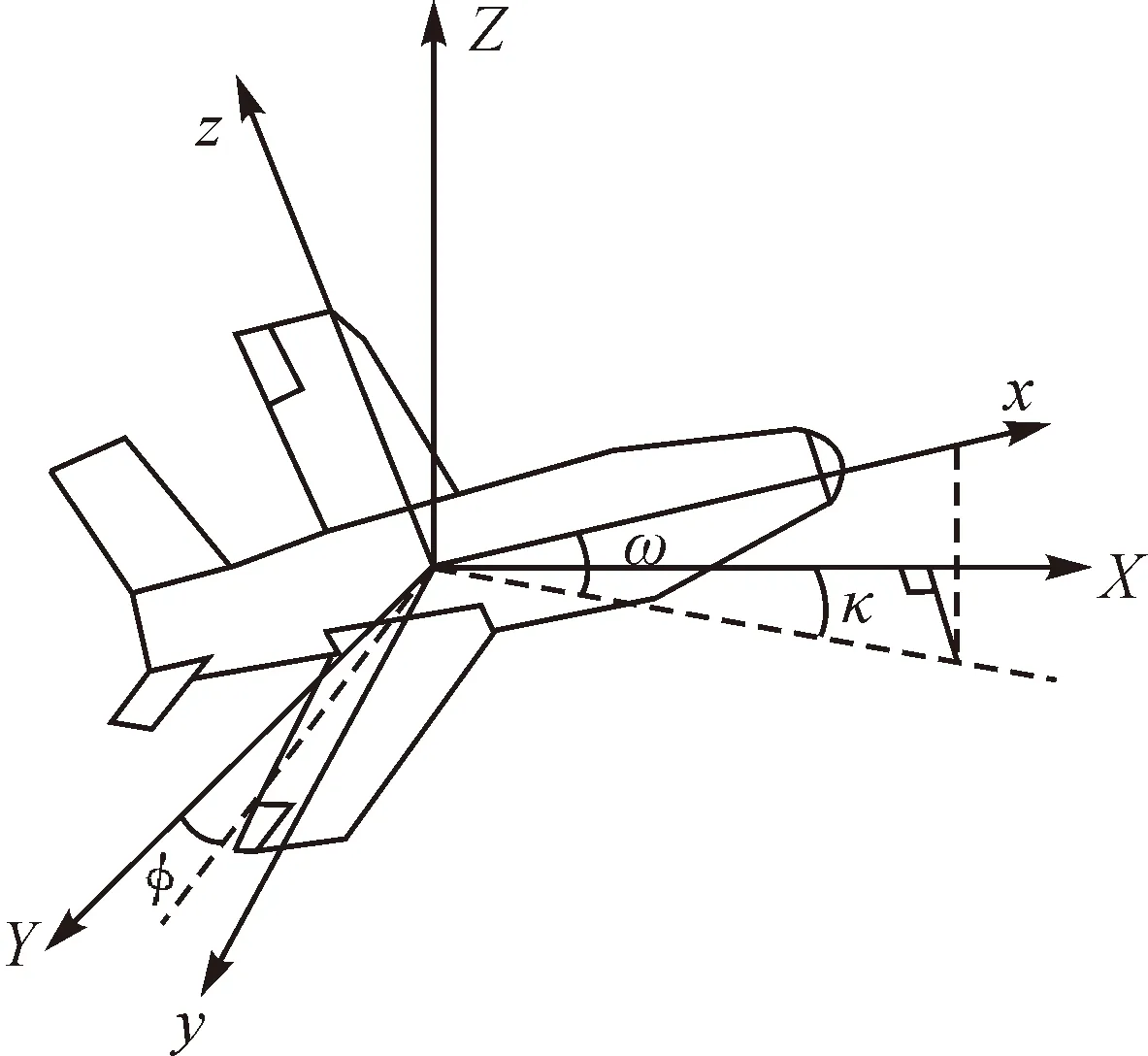
圖3 無人機姿態角定義
以攝影中心為坐標原點,沿航線前進的切線指向機頭方向為X軸,垂直航線面的指向機身右方為Y軸,垂直XY平面指向機身上方為Z軸。則無人機的姿態有3種情況:繞X軸旋轉的姿態角為橫滾角φ(roll),機體向右滾為正,反之為負。繞Y軸旋轉的姿態角為俯仰角ω(pitch),當X軸的正半軸位于過坐標原點的水平面之上(抬頭)時,俯仰角為正,否則為負。繞Z軸旋轉的姿態角為航偏角κ(yaw),機頭右偏航為正,反之為負。
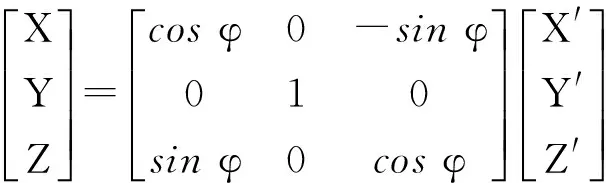
用姿態角轉動法表示姿態時,按不同順序旋轉3個角所得到的姿態方位不一樣,每次轉動可用矩陣表示,即姿態矩陣,可用3個姿態角構建旋轉矩陣。下面方程中(X,Y,Z)代表地面點在地面輔助坐標系中的坐標,(x,y,-f)則代表像點在像空間坐標系中的位置。
經過第一次旋轉后,有
(1)
寫成向量的形式為
X=RφX′
(2)
第二次旋轉后,有
(3)
寫成向量的形式為
X′=RωX″
(4)
最后一次Z軸進行第3次旋轉后,有
(5)
寫成向量的形式為
X″=Rκx
(6)
因此
(7)
其中
R=RφRωRκ
(8)
計算得到

(9)
這種按連動軸的有序旋轉,其總旋轉矩陣由各單獨旋轉矩陣依旋轉順序相乘構成,完成了像空間坐標系與地面輔助坐標系之間的轉換。
2. 影像定向及點云提取
影像的拍攝位置是由無人機在飛行過程中根據航線設計和飛行姿態所決定的。根據攝影測量基本原理,對120張影像進行定向計算,以解算自由坐標系下照片位置、姿態數據。本文只有影像和POS數據,未測定地面控制點,因此,利用Agisoftphotoscan軟件根據多視圖三維重建技術計算照片的姿態參數,根據無人機姿態參數找到航線和每一張航攝像片的拍攝位置,從而快速準確地進行地理定位。根據已有姿態數據,提取帶坐標信息的三維密集點云數據匹配,點密度達到13.793 5點/m2。如圖4所示。
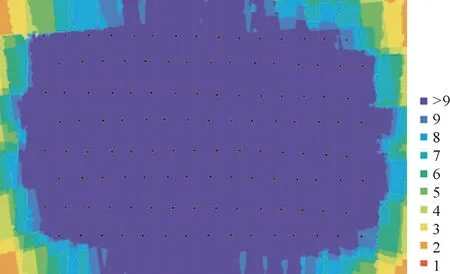
圖4 相機拍照點及重疊率
無人機自身定位精度是經度、緯度、高度的綜合誤差(CEP),由機載差分GPS接收機的性能決定。圖5中橢圓形狀表示XY的定位誤差,橢圓的灰度表示Z的定位誤差,圖中黑色的點表示攝影機的位置。

圖5 相機的位置和誤差估計
3. 建立多邊形網格模型
根據帶坐標信息的三維密集點云數據快速重構目標的多邊形網格(polygonalmesh)模型,重構出線、面、體、空間等各類數據,展現事物真實的形態特性。三維多邊形網格模型是表示多面體形狀的頂點與多邊形的集合,能夠創建不規則形體和易于觀察的著色圖像。并選取高質量的數碼影像賦予mesh精細的彩色紋理。
4. 制作DEM、DOM
能夠直接生成數字高程模型DEM,生成像素分辨率為0.272 7m的DEM。由于DEM描述的是地面高程信息,可作為林業數字地形分析、森林生產力估算、確定林地小班的地形、地貌、坡度因子等方面的基礎數據。導出的高精度、信息豐富、直觀逼真的1∶500數字正射影像圖DOM,可作為背景控制信息,也可提取自然資源和社會經濟發展信息,為防災減災、公共設施建設等方面提供快速有效的信息。如圖6、圖7所示。
5. 精度檢查
影像正射影像圖產品質量的因素主要有影像質量、數學精度、數據接邊等。由于GPS點本身的定位精度很低,常規的控制點定位檢查意義不大,因此,本文采用影像疊加的檢查方法將已有的矢量文件與正射影像圖進行套合疊加檢查。經目視檢查,道路等主要地物的重合良好,圖中下方為無人機影像,上方為矢量文件。經目視檢查,制作的DOM影像紋理清晰、影像分辨率正確、亮度和對比度適中、無重影和紋理斷裂現象,不存在噪聲及云影等缺陷。

圖6 重建的數字高程模型DEM

圖7 試驗區數字正射影像圖DOM
四、結束語
機載POS對地定位是一種新型航攝技術,它采用光纖陀螺系統,結合差分GPS定位來直接測定航片的外方位元素,可以減少傳統航空攝影測量成圖中的外業地面控制工序,從而大大減少外業工作量,加快測圖速度。快速生成正射影像圖的方法是目前無人機應急測繪較好的數據處理技術,由于它是基于影像的,紋理數據可以從原始影像中提取,因此可以方便快捷地建立逼真的三維場景模型。本文利用無人機航測遙感系統采集案例地區的高空間分辨率影像,經攝影測量軟件快速處理并制作了1∶500數字正射影像圖,經過精度檢查滿足DOM質量要求。該方法的實施效率高,在很大程度上縮減了外業工期,項目成本僅為傳統膠片航攝系統成本的70%~80%。
[1]WATTSAC,AMBROSIAVG,HINKLEYEA.UnmannedAircraftSystemsinRemoteSensingandScientificResearch:ClassificationandConsiderationsofUse[J].RemoteSensing,2012,4(6):1671-1692.
[2]李德仁,李明.無人機遙感系統的研究進展與應用前景[J].武漢大學學報(信息科學版),2014,39(5):505-513.
[3]崔紅霞,孫杰,林宗堅.無人機遙感設備的自動化控制系統[J].測繪科學,2004,29(1):47-49.
[4]張園,陶萍,梁世祥,等.無人機遙感在森林資源調查中的應用[J].西南林學院學報,2011,31(3):49-53.
[5]金偉,葛宏立,杜華強,等.無人機遙感發展與應用概況[J].遙感信息,2009(1):88-92.
[6]王聰華.無人飛行器低空遙感影像數據處理方法[D].青島:山東科技大學,2006.
[7]王京衛.測繪無人機低空數字航攝影像去霧霾研究[J].測繪學報,2016,45(2):251-257.
[8]崔紅霞,林宗堅,孫杰.大重疊度無人機遙感影像的三維建模方法研究[J].測繪科學,2005,30(2):37-39.
[9]宮阿都,何孝瑩,雷添杰,等.無控制點數據的無人機影像快速處理[J].地球信息科學學報,2010,12(2):254-260.
[10]何海清.低空攝影測量航帶重構及數據處理方法研究[J].測繪學報,2014,43(4):440-446.
[11]尹杰,楊魁.基于無人機低空遙感系統的快速處理技術研究[J].測繪通報,2011(12):15-17.
[12]張春曉,文高進,王洪民,等.一種無人機動態監測遙感數據快速處理方法[J].測繪通報,2015(1):50-54.
[13]趙政,凌霄,孫長奎,等.基于POS的無人機傾斜影像匹配方法[J].國土資源遙感,2016,28(1):87-92.
[14]張巖,李建增,李德良,等.基于POS與圖像匹配的無人機目標定位方法研究[J].軍械工程學院學報,2015,27(1):39-45.
[15]王偉.無人機影像森林信息提取與模型研建[D].北京:北京林業大學,2015.
Rapid Production of UAV Image DOM without Control Point Data
CAO Minglan,BO Zhiyi,LI Yadong
2016-06-27
北京工業職業技術學院重點課題(bgzykyz201411);大學生科研訓練項目(2015XSKY11)
曹明蘭(1978—),女,博士,講師,主要從事攝影測量與遙感教學與研究。E-mail:nm_cml@163.com
P23
B
0494-0911(2016)08-0035-04
引文格式:曹明蘭,薄志毅,李亞東.無控制點數據的無人機影像DOM快速制作[J].測繪通報,2016(8):35-38.DOI:10.13474/j.cnki.11-2246.2016.0251.
