基于嵌入式技術的毛巾劍桿織機控制系統設計
2016-09-08 09:23:44金永敏
電子設計工程 2016年13期
金永敏
(浙江工業職業技術學院 浙江 紹興 321000)
基于嵌入式技術的毛巾劍桿織機控制系統設計
金永敏
(浙江工業職業技術學院 浙江 紹興321000)
為了設計一套適應廣的毛巾劍桿織機控制系統,文章在分析毛巾織造工藝與織機機械部件運動時序的基礎上,提出一套以32位嵌入式處理器為硬件基礎,基于嵌入式實時操作系統軟件μC/OS-Ⅱ開發平臺的劍桿毛巾織機控制系統的軟硬設計方案。實現了電子送經、伺服卷取、變緯密等功能。同時,該控制系統還具有24路電子龍頭控制與8色電子選緯功能。
劍桿織機;控制系統;LPC1766;μC/OS-Ⅱ
近年來,國產劍桿毛巾織機在市場需求的推動下得到了巨大的發展,市場競爭也越來越激烈,需要不斷更新和開發產品[1]。在此背景下,文章在分析毛巾織造原理與織機機械部件運動時序的基礎上,提出一套以32位嵌入式處理器為硬件基礎,基于嵌入式實時操作系統軟件μC/OS-Ⅱ開發平臺的劍桿毛巾織機控制系統的軟硬設計方案。該控制系統在技術上達到了以下指標:1)開發的控制系統適用于主軸最高轉速為300 轉/分鐘的劍桿毛巾織機。2)具有電子送經、伺服卷取功能,能實現變緯密、織物須長停車自走與定位停車后補償等功能。3)具有24路電子龍頭控制與8色電子選緯功能。4)織物起毛高度在設計范圍內連續可調,能夠實現波浪型花紋編織。5)具有軟件自動尋緯功能。6)毛巾劍桿織機工作狀態實時檢測功能,并在LCD液晶上顯示。同時,該系統還具備各類故障報警功能。
1 毛巾劍桿織機核心運動部件與控制時序
根據劍桿毛巾織機的機械結構與毛巾織造工藝,確定了毛巾劍桿織機的核心運動部件:電子龍頭開口控制裝置、引緯裝置、起毛伺服機構、打緯裝置、送經裝置和卷取裝置等;輔助裝置包括:主軸旋轉角度檢測裝置、啟動離合控制裝置、剎車離合控制裝置、斷經紗與斷緯紗檢測裝置、8色電子選緯裝置等。由于開口、引緯、起毛、打緯、送經和卷取等6大運動都是以織機主軸轉動一周的時間為運動周期[2]。因此,可以采用以主軸旋轉角度來確立毛巾劍桿織機的基本控制時序,即控制各種運動與織機狀態檢測的開始,結束時間、織機各種運動的相互協調關系、控制信息操作時間節點等[3]。毛巾劍桿織機的基本控制時序如圖1所示。

圖1 毛巾劍桿織機基本控制時序圖
2 毛巾劍桿織機控制系統總體設計
毛巾劍桿織機控制系統以LPC1766芯片為核心,從電路的功能看可以劃分為兩大模塊,即LPC1766主控模塊與各種外圍信號接口模塊。其中LPC1766主控模塊包括:LCD液晶顯示與鍵盤接口電路、USB接口電路、數據存儲電路、電源模塊、CPU最小系統、RS232通信接口電路、狀態量輸入輸出接口電路。外圍接口電路包括:經紗檢測信號接口電路、緯紗檢測信號接口電路、24路電子龍頭接口電路、8色選緯接口電路、織機工作狀態開關量輸入接口電路、卷取伺服控制接口電路、主軸轉速信號控制接口電路、啟停與故障保護電路、起毛伺服控制接口電路以及其他控制信號輸入輸出接口電路。毛巾劍桿織機控制系統的結構框圖與信號傳輸方向如圖2所示。由于毛巾生產車間的電磁環境比較惡劣,毛巾劍桿織機控制系統的各種外圍接口電路與LPC1766的主控制電路采用的電氣隔離的方法來增強系統的抗干擾性能。系統的電氣隔離主要采用光電隔離方案實現。

圖2 毛巾劍桿織機控制系統結構圖
根據控制系統的功能設計要求,所設計的毛巾劍桿織機控制系統具有以下的控制信息點:1)24路電子龍頭控制信號;2)8路緯紗選色控制信號;3)8路織機工作方式控制信號;4)4路指示燈控制信號;5)2路離合器控制信號;6)3路主軸電機轉速控制信號;7)10路織機工作狀態信號;8)1路100 V輔助高壓控制信號;9)2組伺服電機控制信號;10)1組RS232通信接口。其中第1至5項是開關量輸出信號、第6 至8項是開關量輸入信號、第9項至第10項是綜合控制信號組,包含多個信號量的輸入輸出。
3 控制系統核心硬件電路設計
毛巾劍桿織機控制系統的硬件電路包含以LPC1766為核心的主控制電路與外圍各類信號接口電路,其中主控制電路涉及的各種芯片及其外圍電路都是典型應用電路,因此文章不對其展開討論。毛巾劍桿織機控制系統使用到的各種外圍接口電路,主要用于完成電氣隔離型開關量信號輸入與輸出、8位數據總線型控制信息輸出、啟動離合器與剎車離合器以及輔助高壓的控制[4]。同時,還包含了伺服電機的控制接口以及其它諸如隔離RS232通信接口電路。具體電路實現方案與功能如下所述:
1)隔離型開關量輸入/輸出電路
隔離型開關量輸入電路用于毛巾劍桿織機控制系統的開關量輸入與織機工作狀態量輸入,主要由P521光耦與施密特觸發器74HC14芯片組成。開關量信號輸入時,低電平有效。當信號輸入時,將使P521光耦的輸出端導通,從而改變施密特觸發器74HC14輸入端的電壓,信號經整形后輸入到LPC1766的數據端口,實現開關量信號的讀入。為了增強抗干擾性能,在74HC14的輸入端與地之間加一0.01 nF的陶瓷電容進行濾波。隔離型開關量輸出電路與開關量輸入電路類似,也采用P521光耦進行電氣隔離,只是信號傳輸方向相反。
2)8位數據總線型控制信號輸出
為了提高LPC1766端口的使用效率,對24路電子龍頭控制信號、8路緯紗選色控制信號與8路織機工作方式控制信號共40路信號的控制采用8位數據總線方式實現[5]。該電路采用了 5片 74HC573和 5片 ULN2803芯片。其中74HC573芯片作為數據總線擴展端口與LPC1766的8位數據總線相連。各個74HC573芯片的/OE引腳相互連接后接到LPC1766的一根地址線,用于控制數據的輸出。同時,各個74HC573芯片的LE引腳作為片選信號各占一根LPC1766的地址線。ULN2803作為總線驅動芯片,其輸入端與74HC573的輸出端相連,輸出端連接到外部信號接口。
3)啟動離合器與剎車離合器以及輔助高壓控制電路
啟動離合器與剎車離合器控制電路類似,LPC1766發出的控制信號通過P521光耦進行電氣隔離后,通過IRF640N功率管控制外部離合器。2路功率管的S腳相連后,經過一個電流采用電阻接地。該電流采樣電阻的參數為0.22 Ω/5 W,用于離合器驅動電流監測,防止電路電流過大[6]。100 V輔助高壓用于提高離合器控制電路的驅動電壓,高電壓驅動可以加快外部離合器電磁鐵的吸合速度,輔助高壓在離合器吸合后撤銷。100 V輔助高壓的控制電路與離合器控制電路類似,由光耦P521與IRF640組成,該電路中的IRF640的S引腳通過一個 36 Ω的功率電阻與 FR307與離合器控制電路IRF640的D引腳相連。離合器電磁鐵的維持電壓為24 V,該電壓通過6A10管子與100 V輔助高壓控制電路IRF640的S腳相連。具體電路如圖3所示。

圖3 離合器與輔助高壓控制電路
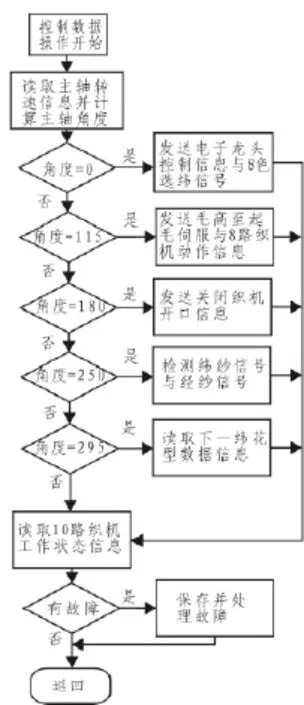
圖4 織機運動機構控制與工作狀態監測流程圖
4 毛巾劍桿織機控制系統軟件設計
毛巾劍桿織機控制系統的軟件基于實時操作系統μC/ OS-Ⅱ開發完成,分為LCD液晶顯示、數據輸入輸出與保存、按鍵處理、串口通信、U盤文件操作等任務模塊。這些任務模塊在實時操作系統μC/OS-Ⅱ的協調下完成對毛巾的織造過程中的紡機機械運動控制。控制系統軟件的核心功能有:
1)通過移植周立功公司推出的ZLGUSB軟件包,在毛巾劍桿織機控制系統中實現利用U盤讀寫FAT32文件操作,完成了對外部毛巾花型數據文件的讀入與管理。
2)劍桿毛巾織機運動機構控制與工作狀態監測,該項功能是控制系統軟件設計的核心部分。在設計過程中,根據劍桿毛巾織機控制信息點、織機動作時序,控制時間節點等信息了編寫正確的控制邏輯關系,完美的匹配了毛巾織造工藝,實現了織機的各個運動機構了的控制與運動協調,使得織機能準確完成毛巾布料的織造流程。其中引緯與打緯不需要控制。同時,還對織機各部件的工作狀態進行了實時監控,確保織造過程的安全性。并預留了工藝調整接口,使得設計的毛巾劍桿織機控制軟件能適用于更多機型。其設計思路如圖4所示。
3)人機界面與控制參數輸入模塊,設計毛巾劍桿織機的人機界面,通過薄膜型按鈕與LCD液晶顯示屏配合,實現了2級菜單界面,可設置與查閱織機的控制參數、運行狀態信息以及查看毛巾花型數據文件[7]。特別是能通過軟件自由設置電機每轉一圈返回的脈沖數、電子齒輪比與刺毛管周長系數,提高了控制系統的靈活性。
5 結論
設計完成后的毛巾劍桿織機控制系統,在合作單位提供的毛巾劍桿織機上,進行了軟硬件聯合調試,在修正了一些設計上的瑕疵后,達到了預定設計指標。實現了,電子送經、伺服卷取功能,變緯密、織物須長停車自走與定位停車后補償、24路電子龍頭控制與8色電子選緯、織物起毛高度在設計范圍內連續可調,、波浪型花紋編織、劍桿毛巾織機工作狀態實時檢測與故障報警等功能。同時,通過適當的參數修改,該控制系統還可以應用于平布紡織。
[1]董春蘭.淺議劍桿織機發展趨勢[J].機械管理開發,2012 (1):37-40.
[2]章玉銘.毛巾劍桿織機的控制系統設計[D].杭州:浙江工業大學,2011.
[3]章玉銘.毛巾劍桿織機的經紗張力控制系統[J].西安工程大學學報,2011(6):295-297.
[4]王慶九,陳宗農,詹建潮.電子多臂劍桿織機數據傳輸系統的研制[J].機電工程,2005,22(3):11-13.
[5]李春明,王欽若,肖華軍.基于ARM和FPGA的劍桿織機控制系統設計[J].自動化技術與應用,2010,29(6):29-32.
[6]何勇,程宇昕.基于CAN總線的劍桿織機控制系統設計[J].制造業自動化,2011(6):135-137.
[7]張峰,張團善,呂雙慶,等.emWin在LPC1788上的移植與應用[J].電子設計工程,2015(6):156-160.
Design of control system for towel loom based on embedded technology
JIN Yong-min
(Zhejiang Industry Polytechnic College,Shaoxing 312000,China)
In order to design a well-adopted control system structure of towels rapier loom,on the basis of analyzing towel weaving process and motion sequence of machine,a control solution for towels rapier loom was is put forward in this paper. The core chip of the hardware circuit of control system is lpc1766.The Control system software was development based on μC/ OS-Ⅱ.The main functions of the control system for towels rapier loom are electronic transfer of warp、Servo coiling、variable weft density and so on.In addition,the control system can control 24 Electromagnets of brown box and 8 color electronic weft selectors.
rapier loom;control system;LPC1766;μC/OS-Ⅱ
TN-9
A
1674-6236(2016)13-0161-03
2015-06-23稿件編號:201506210
浙江省教育廳科研項目(Y201329833)
金永敏(1978—),男,浙江仙居人,碩士,講師。研究方向:嵌入式系統應用、控制理論與控制工程。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
