CORS網絡RTK系統定位精度檢測方法研究
2016-09-08 03:34:23尚飛艷郭俊強嚴地偉
甘肅科技 2016年10期
尚飛艷,郭俊強,劉 錫,嚴地偉,魏 蘭
CORS網絡RTK系統定位精度檢測方法研究
尚飛艷,郭俊強,劉錫,嚴地偉,魏蘭
(61243部隊,甘肅 蘭州730020)
簡述了網絡RTK系統定位的基本原理,對幾種常用定位精度測試方法進行了分析比較。以工程項目使用某市CORS網絡RTK系統為例,對該系統的定位精度進行了測試和評價分析。實際應用結果表明,該CORS網絡RTK較常規RTK技術而言,其導航定位的可靠性和精度更高,可滿足用戶需求。
CORS;網絡RTK;定位精度;檢測方法
網絡RTK系統是由若干個固定的、連續運行的GPS參考站,利用現代計算機、數據通信和互聯網技術組成的網絡,通過建立精確的誤差修正模型,實時地向不同類型、不同需求、不同層次的用戶自動提供不同類型的GPS觀測值(載波相位,偽距)、各種改正數、狀態信息以及其他有關GPS服務項目的系統[1]。同傳統RTK系統相比,網絡RTK系統的有效作業范圍增大,定位精度以及可靠性得以提高,利用網絡RTK系統可以開展全天候、多功能、多用途、應用廣的服務,大大提高了空間基礎數據的利用率。但是其流動站在定位時,受到許多不定因素的影響,在缺乏必要檢核條件時,對其定位精度的可靠性無法進行正確評估,導致網絡RTK系統在一些工程中的應用受到制約[2]。本文將重點分析和比較網絡RTK系統定位精度可靠性的檢驗方法,并結合某市CORS網絡RTK系統,對該系統的定位精度進行測試和評價分析。
1 網絡RTK定位基本原理
目前,網絡RTK技術算法主要有虛擬參考站技術(VRS)、主輔站技術(MAC)、區域改正數法FKP技術和綜合誤差內插技術(CBI)4種[3]。
網絡RTK的幾種算法都是根據流動站絕對定位的坐標發送給數據中心,然后按照各自的模型進行內插得到流動站的改正信息,并通過無線通信技術發送給流動用戶并進行差分。以虛擬參考站技術(VRS)為例,其定位基本原理如圖1所示。
流動站在工作前,先將概略坐標(NMEA0183格式)通過無線移動數據鏈路(如GSM/GPRS、CDMA)傳送給數據中心,數據中心在流動站附近位置創建一個虛擬參考站(VRS),然后內插得到虛擬參考站各項誤差影響的改正值,并以RTCM格式通過NTRIP協議發給流動站用戶;流動站用戶接收數據中心發送來的虛擬參考站差分改正信息或虛擬觀測值,進行差分解算得到用戶cm級的定位結果[4]。

圖1 VRS工作原理圖
誤差模型優化是網絡RTK定位的關鍵技術之一,它是通過利用多個參考站的觀測數據對電離層、對流層等誤差模型進行優化,降低甚至消除誤差。網絡RTK改正數計算是通過相位觀測值與改正數(差分數據)聯合計算,獲得高精度解算坐標,差分改正數包括電離層改正數、對流層改正數和軌道改正數。網絡中相位觀測值可由式(1)決定:

式中:λ為載波相位長;φ為載波相位觀測值;ρ為站星間幾何距離;I為電離層延遲;T為對流層偏差;O為衛星軌道偏差;M為多路徑效應誤差;ε為接收機噪聲;i、k為衛星標號;△、△△分別為單差和雙差因子;A、V為主參考站及VRS標號[5]。
2 網絡RTK定位精度測試方法
一個建成的網絡RTK是否能夠提供連續、動態和高精度的空間定位服務,是否滿足多類用戶實時定位以及事后數據處理高精度定位應用需求,很大程度上取決于系統的定位精度。目前常用的檢驗方法有靜態已知點檢測方法、實時動態觀測值與后處理結果比較的檢測方法、反算基線長法、動態規則幾何軌跡檢測方法和固定基線長度相對檢測方法等。
2.1靜態已知點檢測法
該方法是當前網絡RTK定位精度檢測中最常用也是最易實現的方法。一般通過在系統覆蓋區域內選擇具有代表性的、已知精確坐標的檢測點,將動態用戶接收機架設在已知點上進行實時定位并記錄結果文件,然后對實時定位結果進行統計分析,得到在檢測點上實時定位的內、外符合精度。
內符合精度用于評定網絡RTK定位的穩定性程度,具體方法是計算每一測點所有測量值的算術平均值,再將該算術平均值與每一測量值求差,分析統計出各方向(X、Y、H)差值的分布情況,以反映系統實時定位的穩定性和收斂性。其計算公式為:

其中:ν是測試點觀測值與其算術平均值的差值;n為觀測值總數。
網絡RTK的外符合精度反映了系統定位的準確性和與己有坐標系成果一致性。具體方法是在己知測試點上,通過轉換參數實測得出當地坐標系下的坐標成果,與該測試點的己知坐標成果相比較,即可得出在 (X、Y、H)方向上的外符合精度分布情況。外符合精度與已知點位精度、轉換參數精度、系統定位精度三者有關。其計算公式為:
式中:q檢測點的總數;△為檢測點實測值與已知坐標值的差值[6]。
該方法的優點是統計方法簡單,易實現,在檢測點上能顯著地反映網絡RTK系統實時定位精度;缺點是需要已知檢測點的精確坐標,如果在系統覆蓋區域內很難找到已知點或者坐標基準不統一,該方法就無法實施。
2.2與后處理結果比較法
與后處理結果比較法是選定某一檢測點,先進行靜態觀測,然后再進行實時動態觀測,把實時動態的定位結果與事后靜態數據處理得到的結果進行比較,以事后靜態數據處理得到的結果為真值,來確定實時動態定位結果的精度可靠性。該方法彌補了靜態已知點檢測法需要已知檢測點精確坐標的不足,在系統某些區域很難找到已知點的條件下,采用該方法進行系統定位精度檢測顯得非常有效。但事后數據處理的定位結果受觀測數據質量和參考站坐標精確性影響。
2.3反算基線長法
反算基線長法主要是對通視的、相距不遠的兩點進行實時動態測量,利用實時動態的定位結果反算其基線長,然后與使用靜態測量得到的基線長或使用常規測量方法測得的距離進行比較,兩者的偏差在一定程度上反映出了系統的定位精度。
2.4動態規則幾何軌跡法
動態規則幾何軌跡法是將接收機沿著固定的、有規則的軌跡以一定的速度運動,比較用戶定位獲得的軌跡與實際軌跡之間的偏離值,衡量用戶定位精度。動態檢測的一種常用實現方法,如圖2所示。
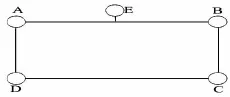
圖2 動態規則幾何軌跡法
選擇一個很規則的矩形軌跡,測試時將接收機天線從A點出發沿著A-B-C-D的順序運動,在角點A、B、C、D做短暫的停留并記錄測量時間,這樣不僅能檢驗用戶接收機的運動軌跡偏差,而且還檢驗在特征點(A、B、C、D)的定位精度,結合二者可以反映用戶接收機的動態定位偏差。
由于GPS動態定位存在誤差,測出的運動點的位置可能會偏離直線,在一定程度上可以認為GPS動態定位的點到直線的距離越大,則表示精度越差。這種檢測方法靈活方便,很容易實現,比較適合做陸地動態測試[7]。
2.5固定基線長度相對檢測法
固定基線長度相對檢測方法是在一個運動載體上架設2個或2個以上用戶接收機來檢測其定位精度,將計算得到的相對關系與實際存在的相對關系進行比較,可以在一定程度上反映用戶接收機的定位精度。該方法適用于無固定檢測點覆蓋區域的定位精度檢測,如在網絡RTK系統覆蓋的海域或湖泊上的船舶等運動載體上檢測其定位精度。由于該方法檢測點間存在固定的邊長相對關系,但沒有固定的坐標分量相對關系,因此該檢測方法存在不能顯著反映動態定位各方向分量上精度的缺點。
3 測試結果及分析
為驗證上述檢測方法的有效性,結合測量工程項目使用某市CORS網絡RTK系統,現給出上述3種定位精度檢測的結果及分析。
3.1采用靜態已知點法檢測結果及分析
測試中共選擇了31個已知點,這些點都是等級較高的控制點,觀測條件良好,有很好的代表性,點位均勻分布在網內外,既有較高等級的GPS控制點,也是較低等級的城市導線控制點。目的是為了比較全面、準確地檢驗網絡RTK系統定位精度,盡量減少測試點自身觀測條件對檢測結果的影響。測試點情況見表1。
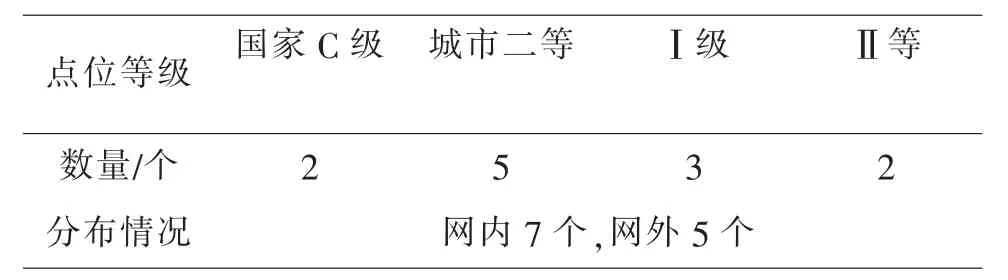
表1 已知點等級及分布情況
內符合精度檢測時,流動站在已知點上分別進行四次初始化,每次采集10個歷元,進行4個測回的觀測,坐標系統采用WGS-84,高程為大地高;外符合精度檢測時,求取了1980西安坐標系到2000國家大地坐標系的轉換參數。按照式(2)、式(3)分別計算出內、外符合精度,統計結果見表2。

表2 靜態已知點檢測法內、外精度統計
從表2可看出,網絡RTK系統的內符合精度比外符合精度要高,一般高1~2cm,水平方向整體優于2cm,高于設計精度4cm;高程方向優于4cm,高于設計精度5cm,表明了該網絡RTK系統實時動態定位穩定可靠。網絡RTK系統的外符合精度概率分布比較離散,分散分布在0~5cm之間,外符合精度水平方向整體優于3cm,水平方向最大值為4.5cm,高程方向優于5cm,說明了網絡RTK實時動態定位是準確的。
3.2采用后處理結果比較法檢測結果及分析
在網絡RTK系統覆蓋范圍內選取7個點,現進行GPS靜態測量,后進行實時動態測量,將實時動態測量結果與后處理計算結果進行比較。比較結果統計見表3。
從表3可看出,采用該方法進行檢測時,除測試點6坐標差值較大外,其余測試點實時定位精度較高,但均高于設計精度和作業規范規定的坐標較差小于5cm的要求[10]。
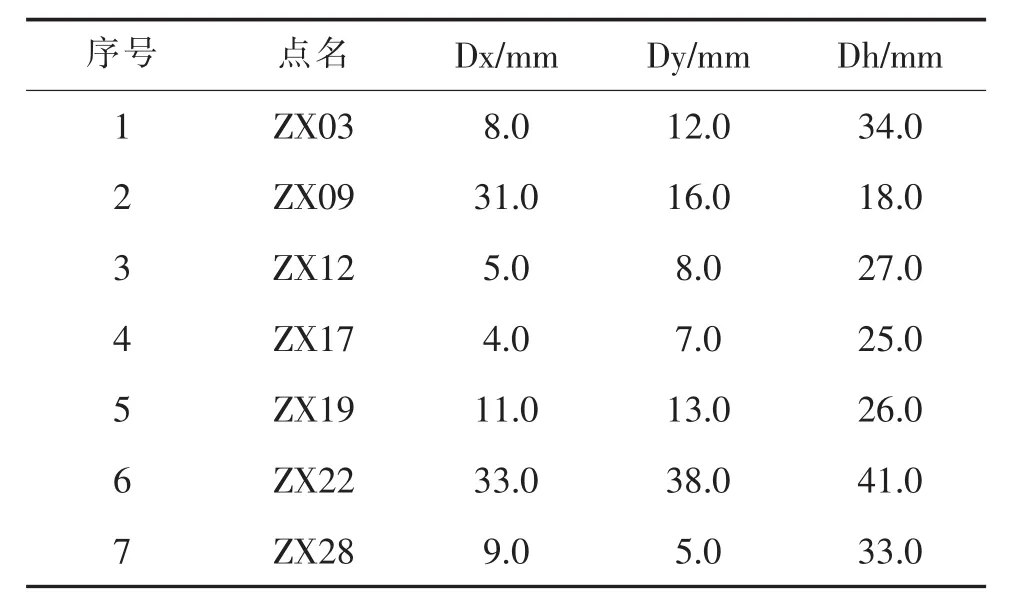
表3 與后處理結果比較精度統計
3.3采用反算基線長法檢測結果及分析
在網絡RTK系統覆蓋范圍內選取10個點,兩點之間相互通視。利用實時動態的定位結果反算出5條基線長,然后使用全站儀對5條邊進行距離測量,對二者的結果進行比較。比較結果統計見表4。

表4 與反算基線長比較結果統計
從表4看出,兩者的差值小于作業規范規定的邊長較差小于15mm的要求,也在一定程度上反映出了該網絡RTK系統的實時定位精度。
4 結束語
網絡RTK系統定位精度的檢測方法有多種。本文利用了常用的靜態已知點檢測法、與后處理結果比較法和反算基線長法三種檢測方法,對該市的CORS網絡RTK系統定位精度進行了檢測。檢測結果表明,該市的CORS網絡RTK系統定位精度可靠性高,其技術指標達到了設計要求,可滿足大比例尺測圖、工程測量及其他等方面的應用需求。值得注意的是,實際工作中應綜合運用各種檢測方法,以便更全面、客觀地對其定位精度進行檢測,并確保定位精度的可靠性。
[1] 王宏偉,楊國林,黃春林.基于蘭州市衛星定位連續運行參考站系統的GPS測圖控制網建設與應用[J].蘭州交通大學學報,2013,32(3):159-160.
[2] 徐文兵.GPS連續運行參考站系統(CORS)定位精度的可靠性研究[D].合肥工業大學碩士論文,2009年4月.
[3] 謝東祺,白云,孟靈飛.幾種形式的網絡RTK技術比較與應用研究[J].測繪與空間地理信息,2014,37(12):178-179.
[4] 魏二虎,柴華,劉經南.VRS定位算法研究[J].武漢大學學報(信息科學版),2006,31(11):1007-1010.
[5] 黃俊華,陳文森.連續運行衛星定位綜合服務系統建設與應用[M].北京:科學出版社,2009.
[6] 蔡成輝,劉立龍,黎峻宇等.CORS定位精度的可靠性研究[J].地理空間信息,2014,12(6):74-75.
[7] 龔真春,楊晉強,白冰等.GPSCORS系統實時定位精度檢測方法探討[J].測繪與空間地理信息,2011,34(3):88-89.
p228
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34