汽車(chē)全輪驅(qū)動(dòng)系統(tǒng)解析
2016-09-19 06:40:39金元山上海汽車(chē)集團(tuán)股份有限公司商用車(chē)技術(shù)中心上海200438
汽車(chē)實(shí)用技術(shù) 2016年8期
金元山(上海汽車(chē)集團(tuán)股份有限公司商用車(chē)技術(shù)中心,上海 200438)
?
汽車(chē)全輪驅(qū)動(dòng)系統(tǒng)解析
金元山
(上海汽車(chē)集團(tuán)股份有限公司商用車(chē)技術(shù)中心,上海 200438)
文章介紹了全輪驅(qū)動(dòng)系統(tǒng)結(jié)構(gòu)組成、布置方案,分時(shí)四驅(qū),全時(shí)四驅(qū)和適時(shí)四驅(qū)的驅(qū)動(dòng)形式及特點(diǎn),闡述了全輪驅(qū)動(dòng)汽車(chē)中性轉(zhuǎn)向,提升通過(guò)不良路況能力等性能特點(diǎn),解析全輪驅(qū)動(dòng)汽車(chē)前沿控制技術(shù)的應(yīng)用和獨(dú)立四輪驅(qū)動(dòng)技術(shù)的發(fā)展趨勢(shì)。
全輪驅(qū)動(dòng);差速鎖;地形管理系統(tǒng);越野
10.16638/j.cnki.1671-7988.2016.08.019
CLC NO.: U463Document Code: AArticle ID: 1671-7988(2016)08-58-03
前言
所謂全輪驅(qū)動(dòng)系統(tǒng),又稱(chēng)四輪驅(qū)動(dòng)系統(tǒng),是指汽車(chē)前、后輪都有驅(qū)動(dòng)力。一般用4×4,AWD或4WD(All Wheel Drive 或4 Wheel Drive)來(lái)表示,以下簡(jiǎn)稱(chēng)“四驅(qū)系統(tǒng)”。
傳統(tǒng)汽車(chē)一般只有兩個(gè)驅(qū)動(dòng)輪,驅(qū)動(dòng)力只作用于兩個(gè)車(chē)輪,如果驅(qū)動(dòng)輪扭矩大于有效的附著力,即使是只有其中一個(gè)車(chē)輪打滑,由于差速器作用,其有效的驅(qū)動(dòng)力也將傳到低附著車(chē)輪,形成功率循環(huán),車(chē)輪因此會(huì)失去驅(qū)動(dòng)能力而無(wú)法行駛。為此,為了提高汽車(chē)通過(guò)陡坡,泥濘地,砂礫,雪地等需要較高牽引力的低附著越野路面的需求,從而開(kāi)發(fā)了全輪驅(qū)動(dòng)系統(tǒng)。
1、四驅(qū)系統(tǒng)總布置結(jié)構(gòu)
四驅(qū)系統(tǒng)從總體結(jié)構(gòu)布置上分為發(fā)動(dòng)機(jī)橫置基于前驅(qū)的四驅(qū)系統(tǒng)和發(fā)動(dòng)機(jī)縱置基于后驅(qū)的四驅(qū)系統(tǒng),下面分別說(shuō)明。
1.1發(fā)動(dòng)機(jī)橫置基于前輪驅(qū)動(dòng)的四驅(qū)系統(tǒng)
該結(jié)構(gòu)在取力器和后主減速器之間整合布置限滑差速機(jī)構(gòu),由于無(wú)法布置縱向差速器,不能長(zhǎng)時(shí)間四輪驅(qū)動(dòng),一般采用適時(shí)四驅(qū)系統(tǒng)。
1.2發(fā)動(dòng)機(jī)縱置基于后輪驅(qū)動(dòng)的四驅(qū)系統(tǒng)
該結(jié)構(gòu)布置了分動(dòng)器,可根據(jù)需要布置縱向差速器結(jié)構(gòu),因此可根據(jù)分動(dòng)器結(jié)構(gòu)采用分時(shí),全時(shí)或適時(shí)四驅(qū)系統(tǒng)。見(jiàn)圖2。
2、驅(qū)動(dòng)形式
2.1分時(shí)四驅(qū)PART-TIME 4WD
分時(shí)四驅(qū)(PART-TIME 4WD)—是一種駕駛者可以在兩驅(qū)和四驅(qū)之間手動(dòng)選擇的四輪驅(qū)動(dòng)系統(tǒng),由駕駛員根據(jù)路面情況,通過(guò)接通或斷開(kāi)分動(dòng)器來(lái)變化兩輪驅(qū)動(dòng)或四輪驅(qū)動(dòng)模式,這也是越野車(chē)或四驅(qū)SUV最常見(jiàn)的驅(qū)動(dòng)模式。
分時(shí)四驅(qū)靠操作分動(dòng)器實(shí)現(xiàn)兩驅(qū)與四驅(qū)的切換。它的優(yōu)點(diǎn)是結(jié)構(gòu)簡(jiǎn)單,穩(wěn)定性高,堅(jiān)固耐用,但缺點(diǎn)是必須車(chē)主手動(dòng)操作,有些甚至結(jié)構(gòu)復(fù)雜,不止是一個(gè)步驟,同時(shí)還需要停車(chē)操作,這樣不僅操作起來(lái)比較麻煩,而且遇到惡劣路況不能迅速反應(yīng),往往錯(cuò)過(guò)了脫困的最佳時(shí)機(jī);二是分時(shí)四驅(qū)不設(shè)置中央差速器,不能在硬地面(鋪裝路面)上使用四驅(qū)系統(tǒng),特別是在彎道上不能順利轉(zhuǎn)彎。
一般情況下,車(chē)輛并不能長(zhǎng)時(shí)間處于四驅(qū)狀態(tài),正常行使?fàn)顩r下,采用的是兩輪驅(qū)動(dòng),當(dāng)需要通過(guò)惡劣路面時(shí),駕駛員可以通過(guò)分動(dòng)桿把兩輪驅(qū)動(dòng)切換成四輪驅(qū)動(dòng),讓四個(gè)車(chē)輪都提供驅(qū)動(dòng)力,從而提高車(chē)輛的通過(guò)性能。
2.2全時(shí)四驅(qū)
也叫全時(shí)全輪驅(qū)動(dòng)——簡(jiǎn)稱(chēng)AWD或4WD(All Wheel Drive或4 Wheel Drive)。具體的含義是:汽車(chē)在行駛的任何時(shí)間,任何地點(diǎn),所有輪子均有驅(qū)動(dòng)力。
全時(shí)全輪驅(qū)動(dòng)車(chē)輛會(huì)比兩驅(qū)車(chē)型(2WD)擁有更優(yōu)異與安全駕駛基礎(chǔ),尤其是碰到極限路況或是激烈駕駛時(shí)。理論上,AWD會(huì)比2WD擁有更好的牽引力,車(chē)子的行駛是依據(jù)它持續(xù)平穩(wěn)的牽引力,而牽引力的穩(wěn)定性主要由車(chē)子的驅(qū)動(dòng)方法來(lái)決定,將發(fā)動(dòng)機(jī)動(dòng)力輸出經(jīng)傳動(dòng)系統(tǒng)分配到四個(gè)輪胎與分配到兩個(gè)輪胎上相比較,其結(jié)果是AWD的可控性、通過(guò)性以及穩(wěn)定性均會(huì)得到提升,即無(wú)論車(chē)輛行駛在何種天氣以及何種路面(濕地、崎嶇山路、彎路上)時(shí);駕駛員都能夠更好的控制每一個(gè)行跡動(dòng)作,從而保證駕駛員和乘客的安全。
而在駕駛時(shí),全時(shí)全驅(qū)的轉(zhuǎn)向風(fēng)格也很有特點(diǎn),最明顯的就是它會(huì)比兩驅(qū)車(chē)型轉(zhuǎn)向更加中性,通常它可以更好的避免前驅(qū)車(chē)的轉(zhuǎn)向不足和后驅(qū)車(chē)的轉(zhuǎn)向過(guò)度,這也是駕駛安全性以及穩(wěn)定性的特點(diǎn)之一。
也正因?yàn)锳WD的存在,為汽車(chē)提供了“主動(dòng)安全、主動(dòng)駕駛”的機(jī)會(huì)。
2.3適時(shí)四驅(qū)
適時(shí)四驅(qū)(Real-Time)——單純從字面來(lái)理解,就是指只有在適當(dāng)?shù)臅r(shí)候才會(huì)的四輪驅(qū)動(dòng),而在其它情況下仍然是兩輪驅(qū)動(dòng)的驅(qū)動(dòng)系統(tǒng)。這個(gè)名稱(chēng)是有別于需要手動(dòng)切換兩驅(qū)和四驅(qū)的分時(shí)四驅(qū),以及所有工況下都是四輪驅(qū)動(dòng)的全時(shí)四驅(qū)系統(tǒng)而來(lái)的。
相比全時(shí)四驅(qū),適時(shí)四驅(qū)的結(jié)構(gòu)要簡(jiǎn)單得多,這不僅可以有效也降低成本,而且也有利于降低整車(chē)重量。由于適時(shí)四驅(qū)的特殊結(jié)構(gòu),它更適合于前橫置發(fā)動(dòng)機(jī)前驅(qū)平臺(tái)的車(chē)型配備,這使得許多基于這種平臺(tái)打造的SUV或者四驅(qū)轎車(chē)有了裝配四驅(qū)系統(tǒng)的可能。
前驅(qū)平臺(tái)相對(duì)于后驅(qū)平臺(tái)本身就有著諸多優(yōu)勢(shì),如更有利于拓展車(chē)內(nèi)空間、傳動(dòng)效率更高、傳動(dòng)系統(tǒng)的噪音更小等等。這些優(yōu)點(diǎn)對(duì)于小型SUV,特別是發(fā)動(dòng)機(jī)排量較小的SUV來(lái)說(shuō)顯得尤其重要。
當(dāng)然,適時(shí)四驅(qū)的缺點(diǎn)仍然是存在的,目前絕大多數(shù)適時(shí)四驅(qū)在前后軸傳遞動(dòng)力時(shí),會(huì)受制于結(jié)構(gòu)本身的缺陷,無(wú)法將超過(guò) 50%以上的動(dòng)力傳遞給后軸(或前軸),這使它在主動(dòng)安全控制方面,沒(méi)有全時(shí)四驅(qū)的調(diào)整范圍那么大;同時(shí)相比分時(shí)四驅(qū),它在應(yīng)對(duì)惡劣路面時(shí),四驅(qū)的物理結(jié)構(gòu)極限偏低,主要適用于城市SUV車(chē)型,是目前市場(chǎng)需求最大的車(chē)型。
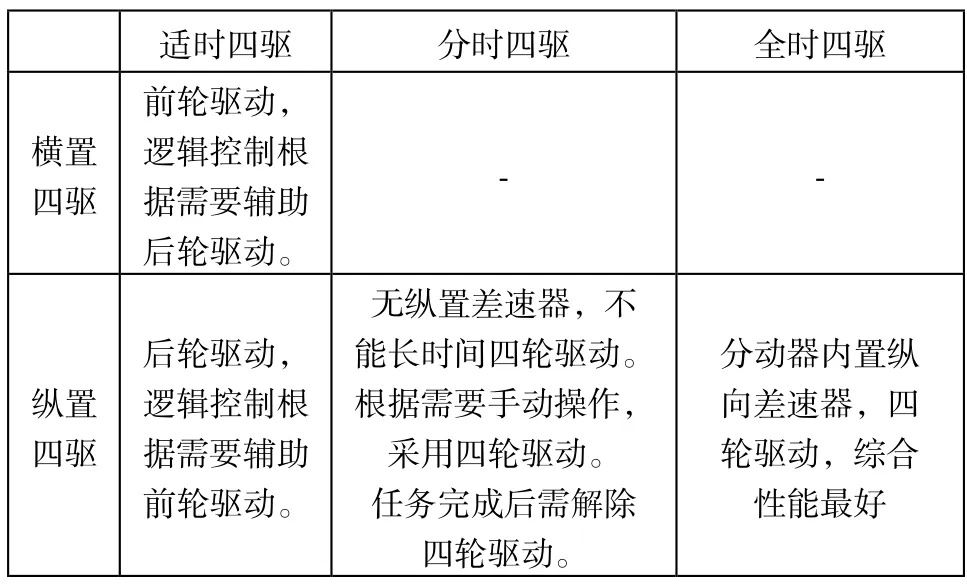
表1
3、四驅(qū)系統(tǒng)車(chē)型運(yùn)動(dòng)特性
3.1良好的加速性和通過(guò)性
車(chē)輛的牽引能力或加速能力主要取決于兩個(gè)因素:一是能夠傳到車(chē)輪上的扭矩,另外一個(gè)則是車(chē)輪所附著的地面提供的附著力。
傳到車(chē)輪上的扭矩主要影響因素有:發(fā)動(dòng)機(jī)扭矩,變速器變速比或變矩比,分動(dòng)器低速比,主減速器速比,輪胎滾動(dòng)半徑。
車(chē)輪附著力主要影響因素有:坡度,地形,輪胎。
這種總布置形式,全部車(chē)輪都是驅(qū)動(dòng)輪,充分利用了汽車(chē)的全部附著質(zhì)量,因此汽車(chē)具有較大的驅(qū)動(dòng)力和克服障礙、防止打滑的能力。
3.2轉(zhuǎn)向穩(wěn)定性
轉(zhuǎn)彎時(shí),全輪驅(qū)動(dòng)時(shí)驅(qū)動(dòng)力分布于4個(gè)車(chē)輪均產(chǎn)生縱向滑移,而不是普通汽車(chē)的兩個(gè)車(chē)輪,降低的側(cè)向力作用于前后兩個(gè)軸,而不是前軸或后軸,這使得四輪驅(qū)動(dòng)汽車(chē)具有中性加速轉(zhuǎn)向性能。四輪驅(qū)動(dòng)汽車(chē)的操控穩(wěn)定性更好。
4、四輪驅(qū)動(dòng)技術(shù)的最近應(yīng)用成果及發(fā)展趨勢(shì)
傳統(tǒng)的越野駕駛需要駕駛員有豐富的越野駕駛經(jīng)驗(yàn),比如,鎖止差速器,切換至低速四驅(qū),關(guān)閉ESP,調(diào)整油門(mén)踏板響應(yīng),變速器升檔提前或延遲等等。隨著電子、電氣技術(shù)的發(fā)展和成熟,更多先進(jìn)技術(shù)應(yīng)用于四驅(qū)系統(tǒng)控制。
4.1地形管理系統(tǒng)
地形管理系統(tǒng)(Terrain Manage System,簡(jiǎn)稱(chēng)ATS)幫助駕駛員選擇不同駕駛模式適應(yīng)不同的地形,駕駛員控制方向盤(pán)就可以了。沒(méi)有多少越野駕駛經(jīng)驗(yàn)的駕駛員也可以越野了。
ATS與普通四驅(qū)系統(tǒng)在硬件構(gòu)成上一致,是專(zhuān)為四驅(qū)系統(tǒng)開(kāi)發(fā)的,增強(qiáng)其在各種路面上驅(qū)動(dòng)、制動(dòng)及車(chē)身穩(wěn)定性能的主動(dòng)安全控制系統(tǒng),是在研究了一些典型路況的特點(diǎn),通過(guò)標(biāo)定,集成控制發(fā)動(dòng)機(jī)EMS,分動(dòng)器TCU,ABS/ESC,電子差速鎖ELD,主動(dòng)懸架CDC,電子轉(zhuǎn)向機(jī)EPS系統(tǒng),把成熟有效的駕駛習(xí)慣預(yù)先設(shè)定在車(chē)輛控制模式程序中使之適應(yīng)不同地形,簡(jiǎn)化惡劣路況操作難度。
ATS和ESC系統(tǒng)均是主動(dòng)安全系統(tǒng),ATS能提升車(chē)輛在更復(fù)雜路面上的性能表現(xiàn),適應(yīng)范圍更廣,更復(fù)雜的路況,降低不良路況駕駛難度。
隨著傳感器技術(shù)以及圖像識(shí)別技術(shù)的進(jìn)步和發(fā)展,四驅(qū)系統(tǒng)駕駛將向著智能化方向發(fā)展,根據(jù)成像識(shí)別及傳感器識(shí)別信息,自動(dòng)判別當(dāng)前路況而選擇合適的地形模式,人類(lèi)駕駛復(fù)雜路況地形時(shí)將會(huì)更加安全,便捷和智能。
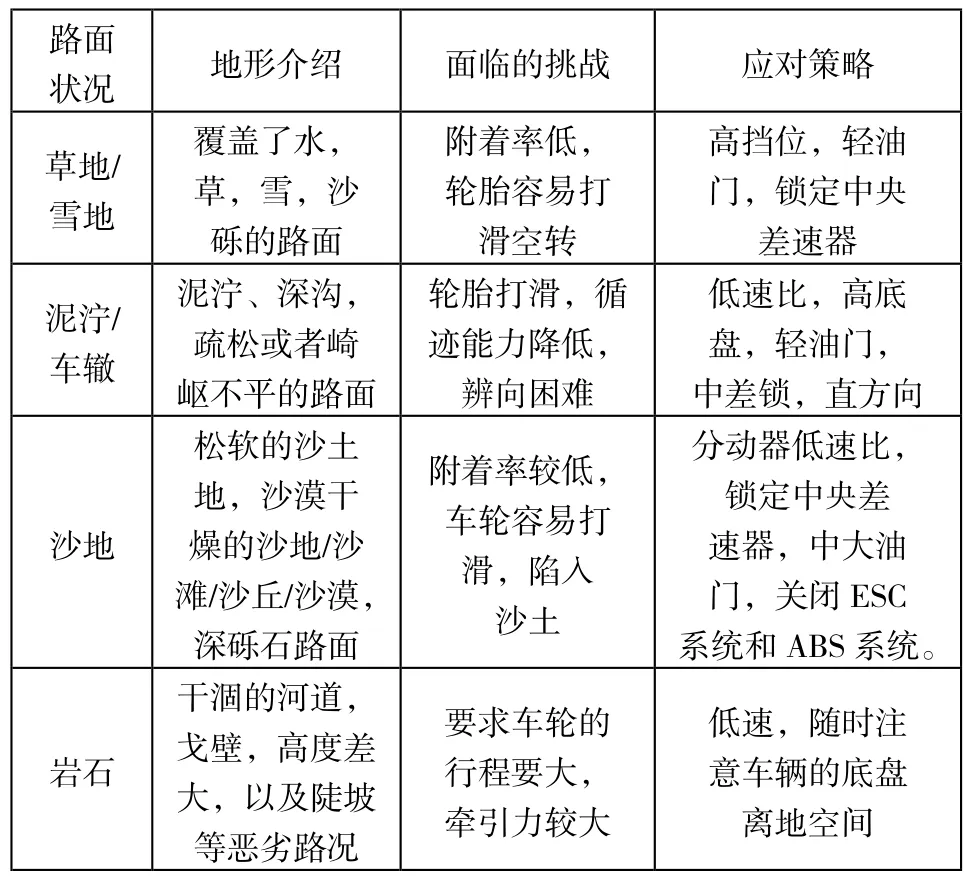
表2 不良路況需要面對(duì)的困難及應(yīng)對(duì)策略
4.2四輪獨(dú)立驅(qū)動(dòng)系統(tǒng)
隨著汽車(chē)產(chǎn)業(yè)的大力發(fā)展和環(huán)境問(wèn)題的日益嚴(yán)重,排放法規(guī)越來(lái)越嚴(yán)格,行業(yè)將關(guān)注和發(fā)展的重心轉(zhuǎn)移到了新能源驅(qū)動(dòng)技術(shù),尤其是電驅(qū)動(dòng)技術(shù)近年來(lái)發(fā)展迅猛,電動(dòng)汽車(chē)技術(shù)愈發(fā)成熟可靠,全輪驅(qū)動(dòng)汽車(chē)將何去何存,或許四輪獨(dú)立驅(qū)動(dòng)汽車(chē)將是發(fā)展方向之一。
輪邊驅(qū)動(dòng)技術(shù)不僅能節(jié)省大量空間,還能提升傳動(dòng)效率,是新能源車(chē)發(fā)展的一個(gè)很好的方向。
輪邊驅(qū)動(dòng)技術(shù)的應(yīng)用將徹底顛覆四輪驅(qū)動(dòng)布置形式,原有的動(dòng)力傳動(dòng)系統(tǒng)發(fā)動(dòng)機(jī),離合器,變速器,分動(dòng)器,傳動(dòng)軸,主減速器,差速器等將會(huì)消失,取而代之的每個(gè)車(chē)輪自帶驅(qū)動(dòng)電機(jī),根據(jù)整車(chē)需求,自動(dòng)調(diào)整電流大小即可實(shí)現(xiàn)。因此,輪邊驅(qū)動(dòng)技術(shù)和控制邏輯算法將是未來(lái)電動(dòng)汽車(chē)發(fā)展的重點(diǎn)問(wèn)題。
5、結(jié)論
越野汽車(chē)采用四輪驅(qū)動(dòng)的布置形式,每個(gè)車(chē)輪均有驅(qū)動(dòng)力,加速性好,通過(guò)不良路況的能力大幅提升,且四輪驅(qū)動(dòng)克服轉(zhuǎn)向不足和轉(zhuǎn)向過(guò)度能力強(qiáng),其操控性、穩(wěn)定性也大幅提升。隨著地形管理系統(tǒng)的開(kāi)發(fā)應(yīng)用,也極大的降低了越野環(huán)境汽車(chē)的駕駛難度,讓人們更加享受越野駕乘。
[1]Top4×4完全四驅(qū)檔案.2012版/《越玩越野》雜志社編.北京:機(jī)械工業(yè)出版社,2012.5.
[2]四驅(qū)車(chē)越野寶典/(美)艾倫(Allen,J)著:張磊 譯.上海:上海科學(xué)技術(shù)出版社,2015.7.
[3]全輪驅(qū)動(dòng)技術(shù)/(美)John A.Barlage,Todd.Perttola著:刁曾祥 楊洲譯.北京:軍事譯文出版社.2010.12.
Automobile AWD Analysis
Jin Yuanshan
(Commercial Vehicle R&D Center of SAIC Motor,Shanghai 200438)
This paper simply introduces the structure of the AllWheel Drive system,the layout scheme,Part-time 4WD,All-time 4WD and Real-time 4WD,describes the performance characteristics of All Wheel Drive System,and analyzes the application and development trend of the future technology of the AllWheel Drive.
All Wheel Drive; Differential Lock; Terrain Manage System; Off-Road
U463
A
1671-7988(2016)08-58-03
金元山,(1980-),男,工程師,就職于上海汽車(chē)集團(tuán)商用車(chē)技術(shù)中心,從事整車(chē)動(dòng)力傳動(dòng)設(shè)計(jì)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
汽車(chē)與安全(2019年9期)2019-11-22 09:48:03
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
