淺談控制機器人切割工序縱梁切割粘連不斷措施
2016-09-19 06:41:08孫云生楊紅莉高朋陜西重型汽車有限公司陜西西安710200
汽車實用技術 2016年8期
孫云生,楊紅莉,高朋(陜西重型汽車有限公司,陜西 西安 710200)
?
淺談控制機器人切割工序縱梁切割粘連不斷措施
孫云生,楊紅莉,高朋
(陜西重型汽車有限公司,陜西 西安 710200)
機器人切割工序在切割車架縱梁外形時,容易產生切割后粘連不斷現象,返修費時費力。文章從各個角度展開分析,制定了有效的解決措施,通過改進原有機器人切割機檢測頭密封裝置,增加縱梁壓緊裝置等措施杜絕了縱梁外形切割不斷現象發生。
重型卡車縱梁;機器人等離子切割機;切割粘連不斷
10.16638/j.cnki.1671-7988.2016.08.078
CLC NO.: U466Document Code: AArticle ID: 1671-7988(2016)08-232-03
引言
縱梁的加工大體可以分為沖孔、壓型、清洗烘干拋丸、切割、合梁及透孔五個工序,切割工序主要承擔縱梁總成內梁及外梁外形的加工。
1、加工現狀
機器人切割工序做為縱梁加工中必不可少的環節,產品質量一直存在切割后粘連不斷現象(見圖1),切割后仍需人工返修,費時費力,解決切割粘連不斷現象,迫在眉睫。
2、原因分析
等離子切割原理為利用等離子弧高速、高溫和高能的等離子氣流加熱并熔化金屬,再借助某種氣體介質排除熔化了的金屬而形成割口。切割質量與板材厚度、切割電流、氣源壓力、切割速度、切割嘴是否及時更換及檢測頭是否有數值息息相關。切割電流大小和縱梁厚度有關,切割電流隨割件厚度增加而增大;切割速度取決于割件厚度、切割電流,切割速度快慢嚴重影響切口質量,速度過快,等離子弧來不及熔化金屬,容易產生粘連不斷,一般相同厚度板材切割速度增加,切割電流也應相應增加;而切割嘴距離工件距離設定也十分重要,切割嘴距離工件距離過遠,容易產生上表面粗糙、割瘤甚至切割不透,而過近則工件背面容易產生飛濺、割瘤甚至撞槍;我們從人、機、料和法四個方面進行分析、討論并現場跟蹤測量,最終確定了三個主要原因為導致機器人切割機切不斷的原因,分別是檢測頭侵蝕、縱梁來料彎曲度過大及切割嘴距離工件距離過遠,具體確認過程如下所述。
2.1檢測頭侵蝕
檢測頭是機器人切割機在執行切割之前檢測縱梁表面平面度的重要部分,我們查看檢測頭密封裝置前端及后端密封情況,具體見圖2,圖3,發現密封情況較差,檢測頭容易侵蝕,常出現檢測頭檢測無值不執行切割現象。
2.2縱梁來料翹曲度過大
因機器人切割機執行切割程序時是以首件來料質量情況進行判讀分析并切割,因而對來料彎曲度是否滿足工藝標準范圍,要求嚴格,我們對4個批次共計100根切割工序縱梁的來料情況進行抽檢,共抽查20根,從前往后1000范圍內其翹曲度統計如下表1,從圖表中我們可以看出縱梁來料不符合標準。

表1 來料翹曲度統計表
2.3切割嘴距離工件距離過遠
機器人切割機在執行切割任務以前,首先要執行檢測程序以檢測縱梁表面的平面度,為切割嘴距離切割面距離提供依據,我們對縱梁未切割斷部分進行分析,發現當切割距離大于600mm時,切割嘴距離縱梁表面距離超出機器人切割機割嘴有效切割距離,容易產生切割不斷現象,具體統計表見表2。
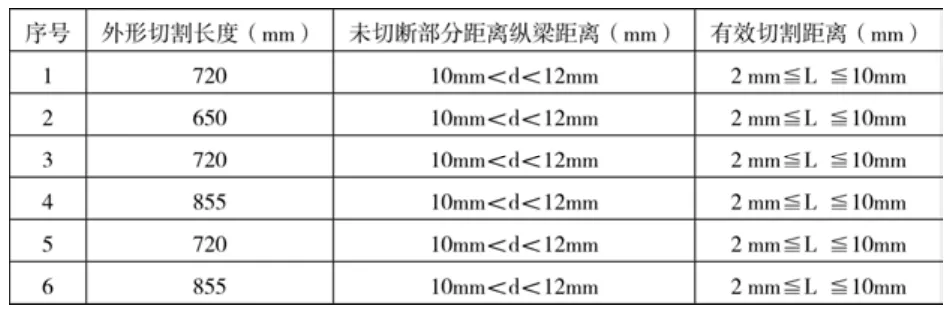
表2
3、對策制定及實施
1.對策制定
針對得出的3方面原因,我們分別制定了相應措施進行解決,如表7所示。

表3 對策實施計劃表
2.對策實施
對策實施1,增加密封裝置,首先我們設計了密封裝置的結構,見圖4,并聯系相關廠家進行加工,密封裝置在機器人切割機工作時,密封擋板可以氣動打開不影響檢測頭檢測,當不工作時密封擋板關閉,可以防止檢測頭受到切割飛濺及灰塵侵蝕,安裝后的密封裝置見圖5。檢測頭安裝新密封裝置后,防止了灰塵及飛濺侵蝕檢測頭,連續3個月均無發現檢測頭檢測無值現象,因此該項措施有效。
對策實施2,增加壓緊裝置減少縱梁前端翹曲度,同樣我們先選擇壓緊汽缸,并設計了壓緊裝置的結構,具體見圖6,并進行安裝,安裝后的壓緊裝置見圖7,壓緊裝置增加后,我們現場測量了共計12根前端翹曲度不符合要求縱梁,壓緊后縱梁前端1000范圍內的翹曲度,我們發現壓緊后前端翹曲度滿足了我們的要求,因此該項措施有效。
對策實施3,增加檢測點數量,理想的切割平面,機器人切割機在切割直線時,根據兩點確定一條直線,兩個檢測點便可以進行有效切割,但是實際加工中,由受縱梁表面不平,翹曲等影響,容易產生切割嘴距離工件距離過遠切割不透或過近切割滅弧現象,因而我們的措施是當切割距離大于600時,在原有2個檢測點基礎上在增加一個檢測點,防止切割頭距離工件距離過遠,具體原理圖見圖8。
4、結語
三個措施實施完成后,我們對改進后機器人切割工序所加工的不合格縱梁進行統計,再無發現縱梁切割不斷粘連現象,徹底杜絕了此種現場的發生。另外,通過本次攻關研究,該工序的不合格率也由6.5%降低到2.4%,大大的節約了返修成本,同時也增強了各部門之間的溝通協作能力,質量意識有了大幅度的提升。
Simple analysis Control of beam Cutting adhesion measures In robot cutting process
Sun Yunsheng,Yang Hongli,Gao Peng
(Shaanxi Heavy-duty Automobile Company Limited,Shaanxi Xi'an 710200)
The robot cutting process in cutting Heavy-duty beam,It's easy to produce the cutting adhesion phenomenon,re work is time-consuming and laborious.The article analysis from multiple perspectives,formulate effective measures to sol ve this problem,by improving the original robot cutting machine detection head sealing device,increase rail clamping devi ce,and so on .Through a number of measures put into effect,the Heavy-dutybeamcutting continuous phenomenon has been solved.
Heavy-duty beam; Robot plasma cutting machine; Cutting adhesion
U466
A
1671-7988(2016)08-232-03
孫云生(1987-),男,就職于陜西重型汽車有限公司車架廠技術科,主要從事車架縱梁生產工藝技術。
猜你喜歡
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
江蘇安全生產(2020年3期)2020-04-21 05:44:14
云南教育·中學教師(2019年6期)2019-08-13 07:03:28
活力(2019年22期)2019-03-16 12:47:28
基層中醫藥(2018年11期)2019-01-31 05:26:52
