GPS技術在安慶市城市控制測量中的應用
2016-09-26 02:09:31楊新成
現代礦業 2016年5期
關鍵詞:測量
楊新成
(安慶市勘察測繪院)
?
GPS技術在安慶市城市控制測量中的應用
楊新成
(安慶市勘察測繪院)
安慶市城市測量控制網改造采用現代大地測量方法, 利用D級GPS控制網作為測區首級控制網,以二等水準點作為首級高程控制點, 布設7個點構成骨架網。按照GPS網的可靠性指標、精度指標、效率指標進行優化設計,并進行GPS二、三、四等水準聯測,通過一定數量和分布均勻的GPS水準點進行高程擬合,其精度完全符合1∶500大比例尺測圖和城市規劃測量的精度要求,可供類似工程參考。
GPS控制網水準聯測優化設計高程擬合
安慶市平面控制網覆蓋面積約1 200km2,其控制網改造的主要任務是在1978年安慶市三角網的基礎上進行城市測量控制網改造,為城市建設提供基礎測繪資料,為“數字安慶”建設提供準確的數據,建立覆蓋老城區、東部新城區、開發區、宜秀區等區域的D級GPS控制網和城市2020年總體規劃區的水準控制網。
1 測區概況
安慶市地形西高東低,屬于丘陵地區,東部地勢平坦,僅1座煙墩山,平均高程約13m,鄰近樅陽縣有下樅陽北山(海拔137m);北部有花山尖(海拔320m)、小龍山脈、大龍山脈;西部有紗帽山(海拔224m)、月山鎮大黃山、洪鎮興安嶺、螞蚱尖、石鏡鄉黃土山等,最高海拔達446m;南鄰長江。測區屬于亞熱帶沿江季風性濕潤氣候,四季分明,年平均氣溫14.5~16.6 ℃,年平均降水量1 300~1 500mm,無霜期約248d。測區交通便利,有206國道、318國道、228省道貫穿。
2 GPS控制網測量
2.1GPS控制網設計
測區內已有的安徽省C級GPS網控制點成果和1978年主城獨立網成果,點位位置如圖1所示。由于安慶市測繪基準仍使用1978年的主城獨立三角網成果,盡管已有2007年的安徽省C級GPS網成果,但為確保城市測量基準的一致性,仍需歸算至1978年安慶市測繪基準。因此,在控制網改造過程中,沿用1978年安慶市獨立三角網起算點(鳳凰山(總參Ⅱ等補網點)、牛頭山(總參Ⅱ等補網點))。由于該2個起算均位于測區西南側,距已知最遠點(R637)約30km,為確保控制網精度的均勻性,加測了同步環,即井頭山—R685—R670—R927—鳳凰山(GD21)和環R685—R670—R927—R637—R636,以該7個點為骨架點組成的環與內部環進行整體平差。經比較,在不增加上述兩環處理結果、增加上述兩環處理結果的2種情形下,點位差異最大的為R637點,ΔX為4mm,ΔY為10mm,ΔH為 1mm。
2.2GPS網外業觀測
采用4臺GPS雙頻接收機和1臺單頻接收機進行靜態測量,其中2臺為南方靈銳S82(靜態基線±(3mm+1×10-6D(D為所測距離,m)),高程 ±(5mm+2×10-6D))和2臺諾瓦泰smart6100IS(靜態基線±(5mm+1×10-6D)),高程±(10mm+1×10-6D));1臺單頻接收機為諾瓦泰smart3100IS(靜態基線±(5mm+1×10-6D,高程±(10mm+2×10-6D))。D級GPS測量技術要求:衛星截止高度角15°,觀測有效衛星數≥4,觀測時段數≥1.6,時段長度≥45min,采樣間隔10~30s。根據測區情況,進行衛星可見性預報,制定觀測計劃,嚴格按D級GPS測量技術要求進行施測,骨架點的觀測時段長度大于120min,其他GPS點的觀測時段長度大于60min,其點位的幾何圖形強度因子PDOP≤6,有效觀測衛星數≥6,采樣間隔15s,骨架點的觀測重復設站率為2.8,其他GPS點的觀測重復設站率為2.3[1-3]。
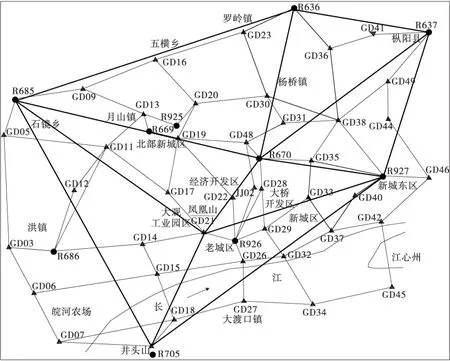
圖1 GPS控制點布設
2.3GPS觀測數據處理2.3.1靜態數據質量檢查
當日觀測完畢后,及時將數據下載至計算機中,首先將諾瓦泰接收機的數據在隨機平差軟件中進行數據處理,編輯點名和儀器高;然后將諾瓦泰數據轉存為RENIX數據格式,應用南方GPS平差數據處理軟件對所有GPS靜態數據進行質量檢查,以數據剔除率5%為標準,10%為限差,檢查有效觀測衛星數是否為6顆以上,數據利用率是否達到90%,剔除含粗差的觀測值,并及時將GPS靜態數據轉為RENIX數據,存入RENIX數據文件夾,及時將文件備份,確保觀測數據不丟失。
2.3.2基線解算
基線解算采用南方GPS數據處理軟件、雙差固定解進行解算。基線解算參數為方差比≥3,中誤差≤0.02。D級GPS控制網共有基線249條,通過基線解算,基線最大中誤差30mm,基線為JJ02—GD19(雙頻機同步觀測),基線邊長為8 350.633m,標準限差84.10mm,最小中誤差3mm,中誤差為9mm的有34條基線,占13.65%,3~9mm(包括3mm)的有103條,占41.37%,9~19mm的有105條,占42.17%,20~30mm的有7條,占2.81%。
2.3.3同步環精度統計
D級GPS控制網共有236個同步環(3個點組成1個環),同步環相對閉合差最大1.5 ×10-6,共有3個環:①環GD14—GD21—GD17,平均邊長 5 556.278m,允許誤差508×10-6;②環GD13—R669—GD19,平均邊長2 836.055m,允許誤差270×10-6;③環GD30—GD31—GD19,平均邊長 7 506.699m,允許誤差681×10-6。最小同步環相對閉合差為0,同步環相對閉合差≤1×10-6的有216個,占91.5%,(1~1.5)×10-6的有20個,占8.5%。同步環坐標分量閉合差及環線全長閉合差見表1。
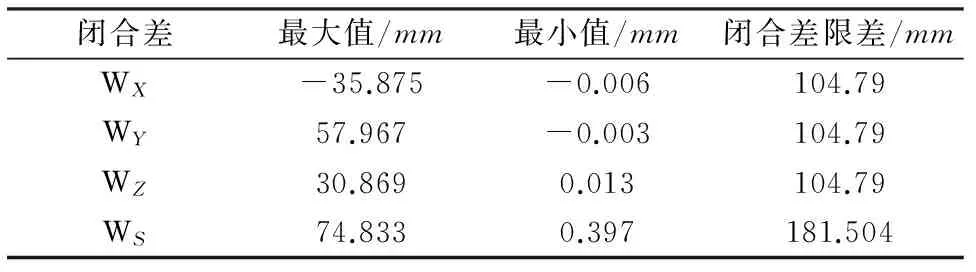
表1 同步環坐標分量閉合差及環線全長閉合差
注:最大值均在骨架點構成的環JTSH—R927—R685中,平均邊長30 234.218m。
2.3.4異步環精度統計
D級GPS控制網共有392個異步環,最大異步環相對閉合差5.7×10-6,環GD40—GD33—GD37的平均邊長4 235.885m。最小異步環相對閉合差0.1×10-6,異步環相對閉合差≤1×10-6的有238個,占60.7%,(1~2)×10-6的有108個,占27.6%,(2~3)×10-6的有34個,占8.7%,(3~5.7)×10-6的有12個,占3.0%。異步環坐標分量閉合差及環線全長閉合差見表2。

表2 異步環坐標分量閉合差及環線全長閉合差
2.3.5重復基線精度統計
D級GPS控制網共有52條重復基線,重復基線較差最大值33mm,基線為GD11—R686,基線邊長11 810.687m,復測基線較差允許值為335.2mm,復測基線較差最小值為0。
2.4GPS控制網平差
2.4.1三維自由網平差
D級GPS控制網利用南方測繪GPS數據處理軟件在WGS-84坐標系下進行三維無約束平差。最弱邊為GD38—GD35,相對中誤差1/250 298,基線邊長1 741.603m,最弱點為GD44,最優點為GD48。基線相對中誤差≤1/150萬的有100條,占40%, 1/80萬~1/150萬的有96條,占39%,1/25萬~ 1/80萬的有53條,占21%。三維自由網平差WGS-84坐標點位X、Y、Z的誤差分別為5.487、8.186、5.898mm。
2.4.2二維約束平差
根據D級GPS控制網優化設計,利用總參Ⅱ等補網點鳳凰山(GD21)、井頭山點作為整網平差起算點,在1954北京坐標系下進行二維約束平差,整網平差后單位權中誤差為0.815mm。二維約束平差基線相對中誤差≤1/150萬的有132條,占67%; 1/80萬~1/150萬的有54條,占27.4%;1/40萬~1/80萬的有11條,占5.6%。二維約束平差點位中誤差≥2mm的有1個,占2%;2~3mm的有38個,占77.6%;3~4mm的有10個,占20.4%。
2.5高程擬合
測區布設有二、三、四等水準控制網,省C級GPS控制網均有高程數據(1985國家高程基準,精度為四等)。根據高程系統的轉換關系(1956黃海高程基準=1985國家高程基準+0.02 9m),將省測繪局1985國家高程基準轉換成1956黃海高程基準。利用14個分布均勻的GPS/水準點作為起算點,選取11個點作為檢核點,采用二次曲面擬合方法進行高程擬合。高程擬合的內、外符合精度分別為12.956、26.967mm,擬合高程與已知高程之差最大為36mm,最小為7mm。
3 水準測量
3.1水準測量概述
城市控制網改造項目布設有二、三、四等水準控制網,采用1956黃海高程基準,水準測量按照《城市測量規范》(CJJ/08—1999)進行施測,聯測GPS點17個,二等水準點9個,二等水準閉合環長104km,三等水準點10個,附合水準路線長19.8km,四等水準點22個,水準環2個,路線長分別為11.6、5.9km。
3.2外業觀測質量檢核
(1)二等水準測量。同一測段均計算往返測不符值Δ和測段長度Ls,Δ≤±4 Ls,該工程中最大Δ值為±5.5mm(ZYX—GE05),長2.4km,Δ≤±4 Ls=±6.2mm。
(2)三、四等水準測量。三等水準同一測段均計算往返測不符值Δ和測段長度Ls,Δ≤±12 Ls,該工程中最大Δ值為±8.5mm(IV27—GD33),長3.68km,Δ≤±12 Ls=±23.0mm。
3.3水準平差計算
水準網平差在清華山維NASEW2003軟件中進行。
(1)二等水準平差。控制網中已知點1個,待定點86個,直高174個,固定點為皖水乙II上。二等水準平差后,最大點位誤差0.004 38m,最大點間誤差0.001 50m。經計算,單向閉合差往測為 -28.8mm,返測為25.8mm,均精度要求(±40.58mm)。
(2)三等水準平差。三等水準控制網中待定點10個,直高22個,固定點2個(為GD36和機場小學)。三等水準平差后,最大點位誤差0.003 06m,最大點間誤差0.002 41m。經計算,附合差為 ±0.85mm,符合精度要求(±53.4mm)。
(3)四等水準平差。四等水準有2條線路:線路一為附合于QP02、WJ00點單一線路,待定點7個,直高8個;線路二為附合于IV003、D22、WJ03等三點的結點網,待定點13個,直高15個。線路一平差后,最大點位誤差0.001 96m,最大點間誤差0.001 78m;線路二平差后,最大點位誤差0.011 77m,最大點間誤差0.008 87m。按水準路線長度計算,線路一的附合差限差為±49mm,線路二的附合差限差為±67.8mm(IV003—D22路段,11.5km)和±32.9mm(D22—WJ03路段,2.7km)。
4 結 論
(1)GPS控制網改正項目基準系統應與原有控制網基準系統保持一致。
(2)注重GPS控制網的優化設計,為提高GPS控制網的可靠性,應適當增加觀測期數,增加多余觀測和獨立基線數,保證一定的重復設站率。各GPS控制點至少與3條以上基線獨立相連,短基線邊之間進行同步觀測,網中最小異步環的邊數不大于6條。
(3)為提高整個網的精度,應選定一定數量的GPS控制點構成骨架網。
(4)GPS高程擬合宜選用一定密度且分布均勻的GPS/水準點作為起算點,綜合考慮已知控制點的精度、內符合精度、外符合精度以及位置點精度,確定最優觀測方案。安慶市測量控制網改造項目的高程擬合精度可滿足1∶500大比例尺地形圖測繪的圖根點高程精度要求。
(5)水準觀測時應及時檢核各項觀測限差,避免不必要的返工,提高觀測效率。安慶市測量控制網改造項目利用GPS定位技術、精密水準儀等設備進行施測,D級GPS控制網、水準網成果精度較高,可滿足1∶500大比例尺地形圖測繪的需要,為城市規劃、“數字安慶”建設提供了基礎測繪資料,經濟效益和社會效益顯著。
[1]徐邵銓,張華海.GPS測量原理及應用[M].武漢:武漢大學出版社,1998.
[2]周建鄭.GPS測量定位技術[M].北京:化學工業出版社,2004,
[3]中華人民共和國國家測繪局.GB/T18314—2001全球定位系統(GPS)測量規范[S].北京:中國標準出版社,2001.
2015-11-18)
楊新成(1974—),男,工程師,246001 安徽省安慶市戲校南路61號。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
