基于滑移率的線控制動系統(tǒng)制動力分配策略研究
2016-10-10 05:05:21彭曉燕呂以濱
中國機(jī)械工程 2016年17期
彭曉燕 呂以濱 何 磊
湖南大學(xué),長沙,410082
?
基于滑移率的線控制動系統(tǒng)制動力分配策略研究
彭曉燕呂以濱何磊
湖南大學(xué),長沙,410082
為提高制動安全性和穩(wěn)定性,針對四輪獨立制動的線控制動系統(tǒng),提出了基于滑移率的制動力最優(yōu)分配策略及其約束優(yōu)化問題的實時求解方法,并建立了Simulink與CarSim的聯(lián)合仿真實驗。仿真結(jié)果表明,所提出的制動力最優(yōu)分配策略在不同的制動工況下始終能保證前輪滑移率大于后輪滑移率且后輪滑移率最優(yōu),既提高了汽車制動穩(wěn)定性又能獲得較短的制動距離。最后對最優(yōu)制動力分配策略算法的實時性進(jìn)行了實驗驗證,實驗結(jié)果表明,所提出算法能夠滿足控制的實時性要求。
線控制動系統(tǒng);制動力分配;滑移率;聯(lián)合仿真
0 引言
新能源汽車是未來汽車的發(fā)展方向,而純電動汽車是國際公認(rèn)的新能源汽車的最佳解決方案[1]。然而,相比于傳統(tǒng)內(nèi)燃機(jī)汽車,純電動汽車所需要考慮的安全因素更多,安全系統(tǒng)的設(shè)計更加復(fù)雜。采用線控技術(shù)構(gòu)建有關(guān)汽車安全性能的電子控制系統(tǒng),可極大地提高汽車的安全性、可靠性和穩(wěn)定性,該技術(shù)在現(xiàn)代汽車尤其是純電動汽車上有著廣泛的應(yīng)用前景。線控制動系統(tǒng)(break-by-wire,BBW)將傳統(tǒng)液壓或氣壓制動執(zhí)行元件改為電驅(qū)動元件,每個車輪都有獨立的控制器來實現(xiàn)其制動力的控制[2],故可以通過更優(yōu)的制動力分配策略和控制算法來進(jìn)一步提高汽車制動性能。
基于滑移率的制動力分配方法是一種較優(yōu)的分配方法,而已有的分配策略大多是針對傳統(tǒng)液壓制動系統(tǒng)的。文獻(xiàn)[3]利用邏輯門限控制方法使后輪滑移率始終小于或等于前輪滑移率。文獻(xiàn)[4-5]提出使后輪的滑移率按固定比例追蹤前輪的滑移率,文獻(xiàn)[4]中的比例為一個固定比值,而文獻(xiàn)[5]則將比值分成四段分別進(jìn)行控制。文獻(xiàn)[3-5]均只考慮了縱向制動力,未考慮橫向穩(wěn)定性。文獻(xiàn)[6]針對牽引車提出了滑移率最優(yōu)的制動力分配策略,此策略中各車輪滑移率的權(quán)值取值難以確定。文獻(xiàn)[3-6]雖然都是基于車輪滑移率進(jìn)行制動力分配的,但均未實現(xiàn)根據(jù)實際附著條件獲得最優(yōu)的制動力。
鑒于此,本文提出一種基于滑移率的四輪獨立制動控制的制動力最優(yōu)分配策略,結(jié)合路面辨識,實時求解出各車輪在不同路面下的最優(yōu)滑移率,從而控制各車輪在實際路面下的最優(yōu)制動力。在獲得與傳統(tǒng)的理想制動力分配方法相同的制動強(qiáng)度和制動減速度的前提下,新的制動力分配策略可使前輪滑移率總是大于后輪滑移率,從而在保證汽車制動時的方向穩(wěn)定性、防止后軸先于前軸抱死而發(fā)生危險的側(cè)滑的同時,使前后車輪制動力分配更加接近理想的制動力分配曲線,為制動力控制提供了最佳的制動參數(shù)。
1 制動車輛模型與輪胎模型
1.1直道制動車輛模型
選取一臺轎車作為研究對象,忽略汽車的滾動阻力偶矩、空氣阻力以及旋轉(zhuǎn)質(zhì)量減速時產(chǎn)生的慣性力偶矩,并假設(shè)路面狀況條件不變且同軸車輛左右車輪的載荷相同。汽車在水平路面上制動時的受力情況如圖1所示。圖中,F(xiàn)j為慣性力。
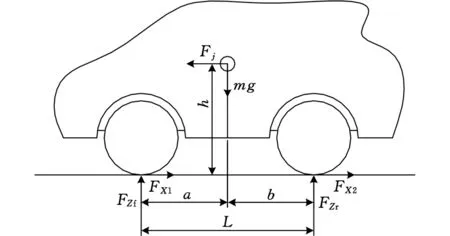
圖1 直道制動時汽車受力圖
汽車制動時,地面對前后軸的法向作用力FZf、FZr分別為
(1)
(2)

1.2輪胎模型
Burckhardt模型是由Burckhardt等經(jīng)過理論變形和仿真分析提出的一種經(jīng)驗輪胎模型[7]。忽略汽車速度變化和輪胎載荷的影響,路面縱向附著系數(shù)的Burckhardt模型可表示為
(3)

2 基于滑移率的BBW制動力分配策略
汽車的制動穩(wěn)定性與制動時車輪是否抱死以及前后輪抱死的先后順序有關(guān)。汽車制動時,理想的制動力分配是前后軸車輪的制動力能跟隨汽車前后軸的動載荷的變化而變化,并保證前后輪能同時抱死以充分利用路面附著系數(shù)。實際的制動力分配應(yīng)同時考慮制動穩(wěn)定性與制動距離,并優(yōu)先考慮制動穩(wěn)定性。汽車制動時地面對車輪的橫向反作用力FH的值越大,其抗側(cè)滑能力越強(qiáng)。而FH的大小與車輪滑移率的大小有關(guān)。當(dāng)滑移率λ=0,F(xiàn)H最大,隨著λ的不斷增大,橫向附著系數(shù)迅速減小,從而令FH顯著減小,這時只要很小的側(cè)向力就有可能導(dǎo)致汽車發(fā)生危險的側(cè)滑。
汽車制動時若后輪先抱死,則很小的側(cè)向干擾力都極易使汽車發(fā)生側(cè)滑,這是一種危險工況。因此針對線控制動系統(tǒng)的特點,為改善汽車制動時的側(cè)向穩(wěn)定性,設(shè)計汽車直道制動力分配策略如下:使車輛產(chǎn)生最大制動減速度以縮短制動距離,同時控制后輪滑移率小于前輪滑移率且使各車輪的滑移率保持在較小值,以改善汽車的制動穩(wěn)定性。結(jié)合Burckhardt模型計算輪胎縱向制動力,則基于車輪滑移率的BBW制動力最優(yōu)分配策略可轉(zhuǎn)換為帶不等式約束條件的非線性多變量函數(shù)的最優(yōu)化問題,該問題的數(shù)學(xué)模型如下:
(4)
s.t.λr<λf
(5)
(6)
0≤λf≤1
(7)
0≤λr≤1
(8)
式中,λf、λr分別為單個前輪、后輪的縱向滑移率;FXf、FXr分別為單個前輪、后輪的地面制動力;μf(λf)、μr(λr)分別為單個前輪、后輪的縱向附著系數(shù)。
式(4)目標(biāo)函數(shù)是在保證汽車方向穩(wěn)定性的前提下,使滑移率保持在較小值。約束條件式(5)保證在任一制動強(qiáng)度下后輪滑移率小于前輪滑移率;約束條件式(6)保證前后車軸制動器的制動力之和等于總的附著力;約束條件式(7)、式(8)為滑移率的取值范圍。
上述帶不等式約束條件的非線性多變量函數(shù)的最優(yōu)化問題的求解有很高的實時性要求,一般的優(yōu)化算法難以滿足其實時控制要求。因此本文針對上述約束優(yōu)化問題提出一種新的實時優(yōu)化計算方法:①采用文獻(xiàn)[8]的方法獲得不同路面下的μf(λf)、μr(λr)的表達(dá)式;②借助MATLAB優(yōu)化工具箱中的求解非線性多元函數(shù)最小值的fmincon函數(shù),離線求解出不同路面下的制動強(qiáng)度z與最優(yōu)滑移率的關(guān)系曲線;③結(jié)合文獻(xiàn)[8]路面辨識方法確定該路況下的制動強(qiáng)度z與最優(yōu)滑移率的關(guān)系曲線,然后根據(jù)實際制動強(qiáng)度z實時計算出各車輪最優(yōu)制動力。
本文選擇一臺轎車作為研究對象,空載時其參數(shù)如表1所示。
基于滑移率的制動力分配策略的最簡單的方法是使汽車前后輪的滑移率相等。基于滑移率相等的制動力分配方法能達(dá)到理想的制動效果。但當(dāng)汽車在變路面系數(shù)路面上制動時,不同的路面制動力系數(shù)與滑移率的關(guān)系不相同,緊急制動時汽車可能出現(xiàn)后輪先抱死的危險現(xiàn)象。
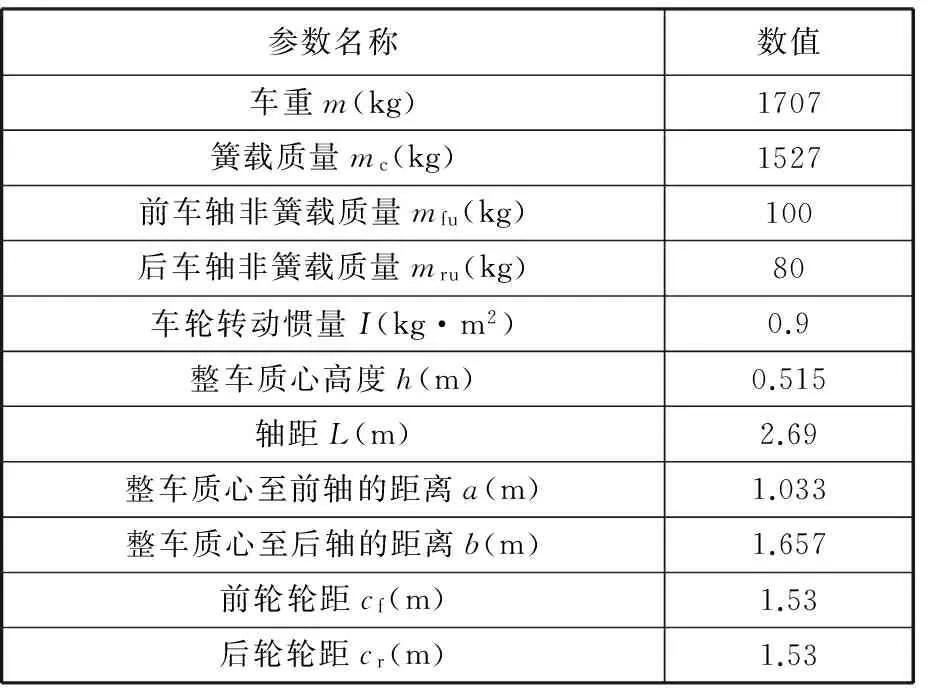
表1 空載整車參數(shù)
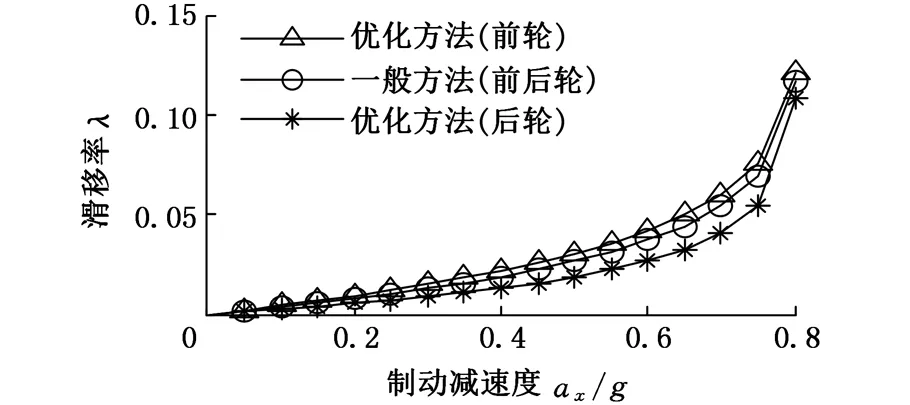
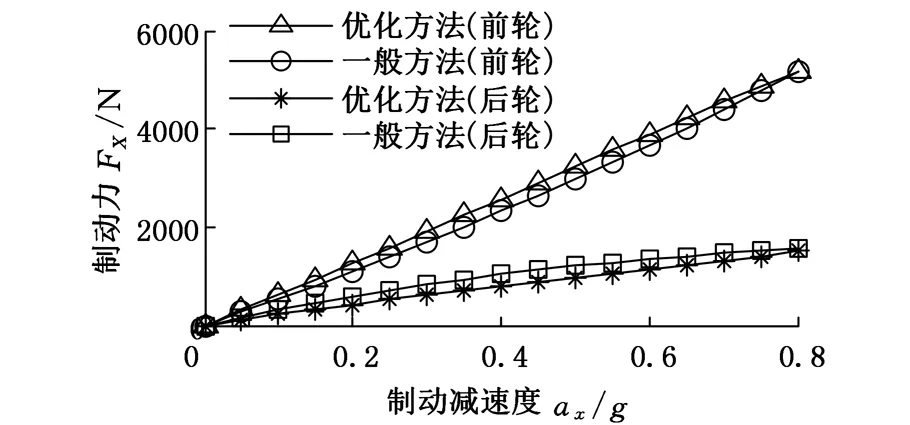
本文選取干瀝青、濕瀝青和雪地三種不同的路面分別對基于滑移率相等的制動力分配策略與本文提出的最優(yōu)分配策略進(jìn)行求解,結(jié)果如圖2~圖4所示,圖中將基于滑移率的制動力最優(yōu)分配策略稱為優(yōu)化方法,基于滑移率相等的制動力分配策略稱為一般方法。
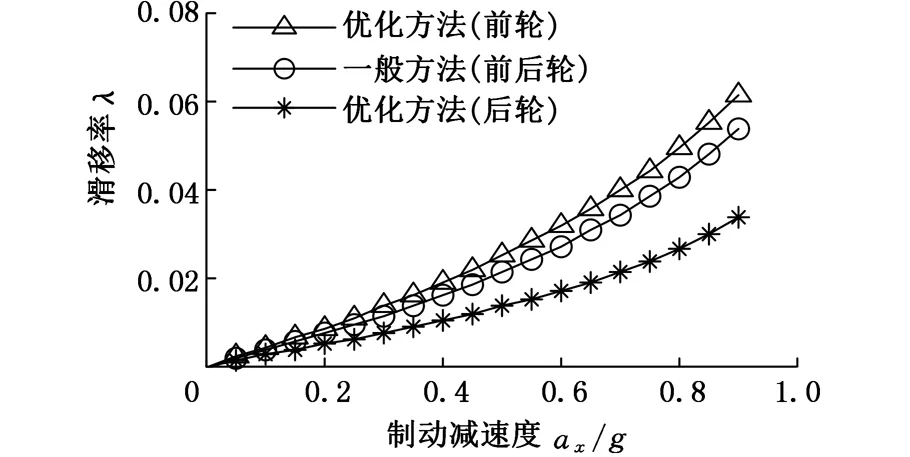
(a)滑移率
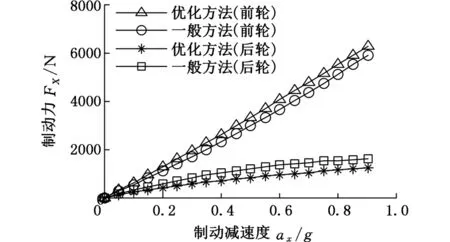
(b)制動力圖2 干瀝青路面滑移率與制動力比較
(a)滑移率
(b)制動力圖3 濕瀝青路面滑移率與制動力比較
計算結(jié)果表明,在同一路面及相同的制動強(qiáng)度下,基于滑移率的制動力最優(yōu)分配策略與基于滑移率相等的制動力分配策略相比,汽車前輪制動力與滑移率都增大了,而后輪制動力與滑移率都減小了,且在任一制動減速度下,后輪滑移率始終小于前輪滑移率,從而提高了汽車制動時的穩(wěn)定性。
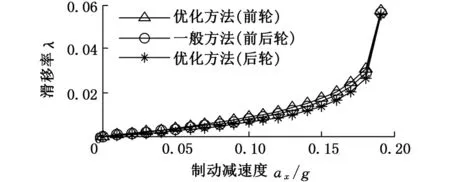
(a)滑移率
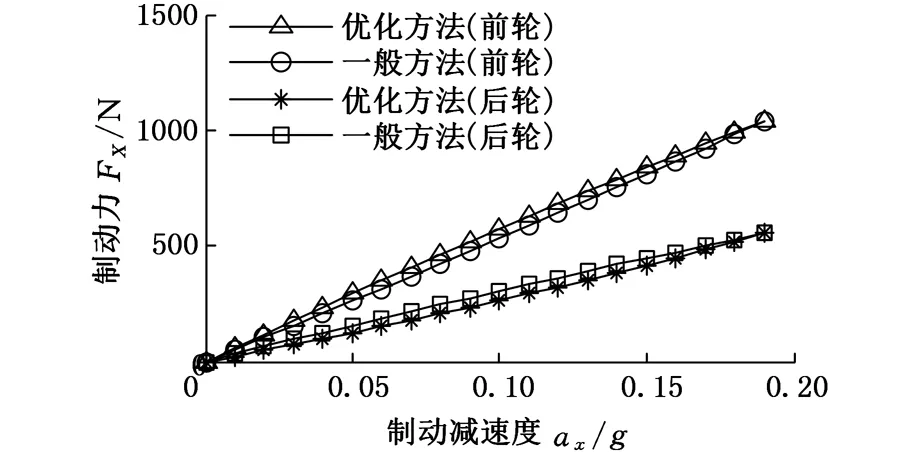
(b)制動力圖4 雪地路面滑移率與制動力比較
3 仿真實驗及分析
3.1仿真模型的建立
本文采用CarSim與MTALAB/Simulink兩個軟件對本文提出的最優(yōu)分配策略進(jìn)行聯(lián)合仿真驗證。分別建立基于滑移率相等的制動力分配策略與本文提出的最優(yōu)分配策略的聯(lián)合仿真模型,并進(jìn)行仿真對比。CarSim軟件用來進(jìn)行車輛參數(shù)化建模,MTALAB/Simulink進(jìn)行算法控制與仿真運行。制動力最優(yōu)分配策略的仿真模型如圖5所示。
3.2仿真條件及結(jié)果
為驗證本文提出的最優(yōu)分配策略的魯棒性,分別在干瀝青、濕瀝青以及雪地三種路面下對汽車在不同的初速度、不同的制動強(qiáng)度下進(jìn)行聯(lián)合仿真,研究不同路面下本文所提出的最優(yōu)分配策略的控制效果,包括汽車制動距離、地面制動力以及滑移率的變化情況。
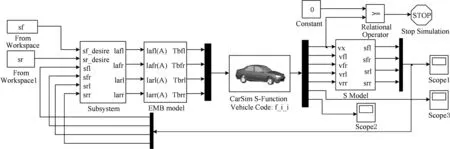
圖5 基于滑移率的制動力最優(yōu)分配策略的仿真模型
3.2.1干瀝青路面仿真
汽車以不同的初速度v在干瀝青直道路面上行駛,仿真終止速度為0。t=0時開始制動,t=1 s時制動強(qiáng)度直線上升到設(shè)定制動強(qiáng)度zp并保持不變。不同初速度和制動強(qiáng)度下車輛制動距離仿真結(jié)果如表2所示。仿真研究表明,不同的制動初速度和制動強(qiáng)度下汽車的實際地面制動力與滑移率的變化趨勢是一致的。圖6~圖9所示為v=60 km/h,zp分別為0.5、0.75時的地面制動力和滑移率的仿真結(jié)果。
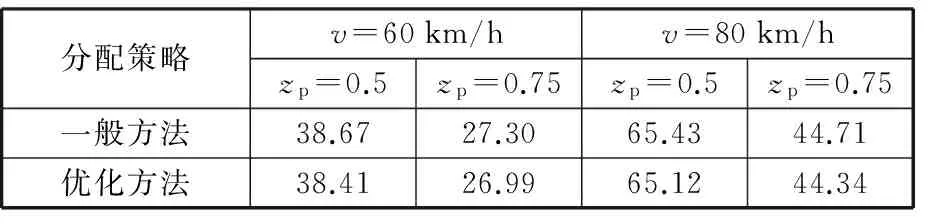
表2 不同初始車速與不同制動強(qiáng)度的制動距離
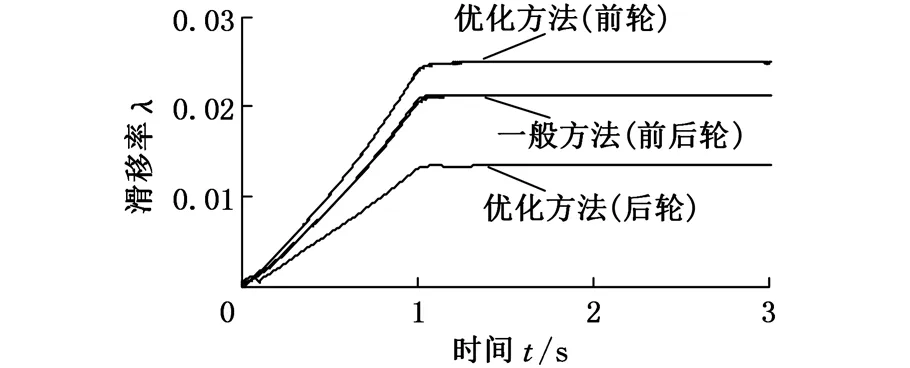
圖6 初速度v=60 km/h、zp=0.5時的車輪滑移率
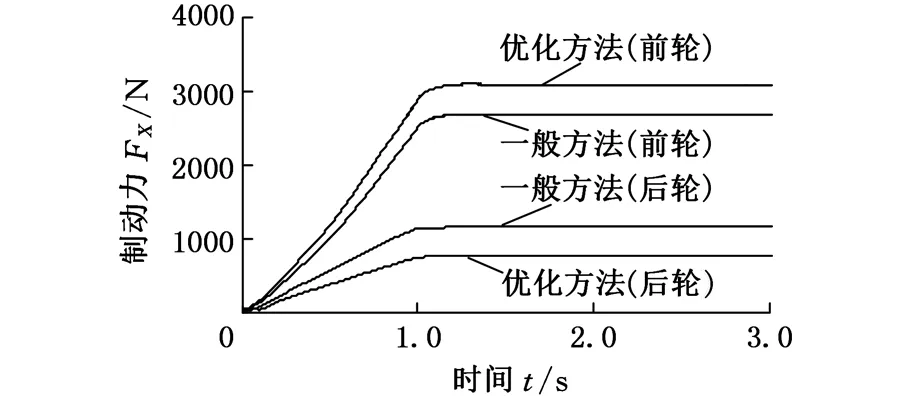
圖7 初速度v=60 km/h,zp=0.5時的地面制動力
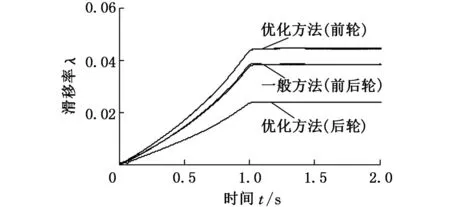
圖8 初速度v=60 km/h,zp=0.75時的車輪滑移率
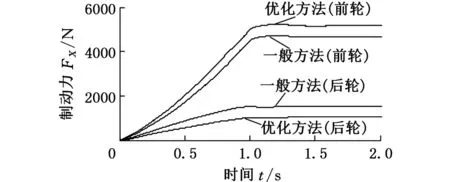
圖9 初速度v=60 km/h,zp=0.75時的地面制動力
3.2.2濕瀝青路面仿真
汽車以不同的初速度v在濕瀝青直道路面上行駛,仿真終止速度為0。t=0時開始制動,t=1 s時制動強(qiáng)度直線上升到設(shè)定制動強(qiáng)度zp并保持不變。不同初速度和制動強(qiáng)度下車輛制動距離仿真結(jié)果如表3所示。仿真研究表明,不同的制動初速度與制動強(qiáng)度下汽車的實際地面制動力與滑移率的變化趨勢是一致的。圖10~圖13所示為v分別為60 km/h、80 km/h,zp=0.75時的地面制動力和滑移率的仿真結(jié)果。
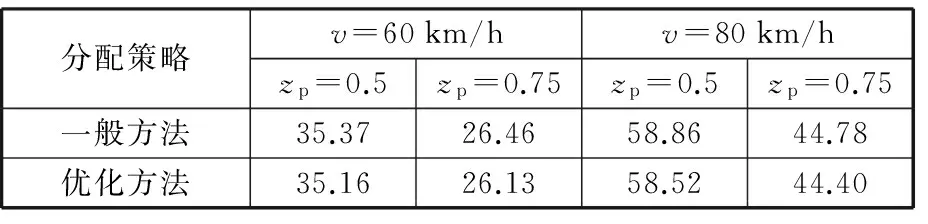
表3 不同初始車速與不同制動強(qiáng)度的制動距離
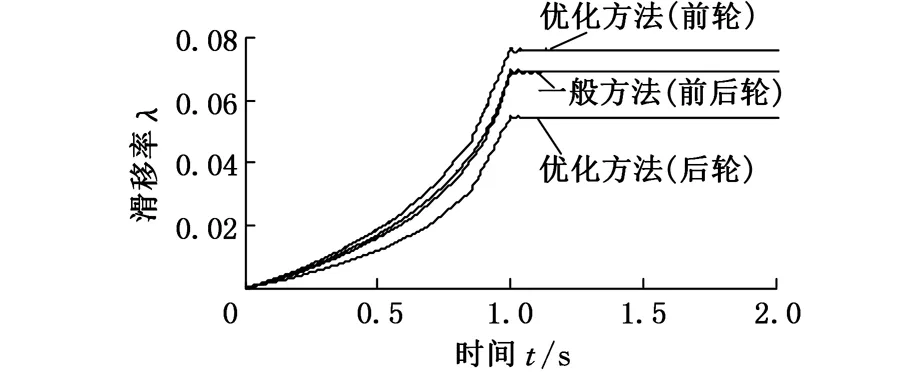
圖10 初速度v=60 km/h,zp=0.75時的車輪滑移率
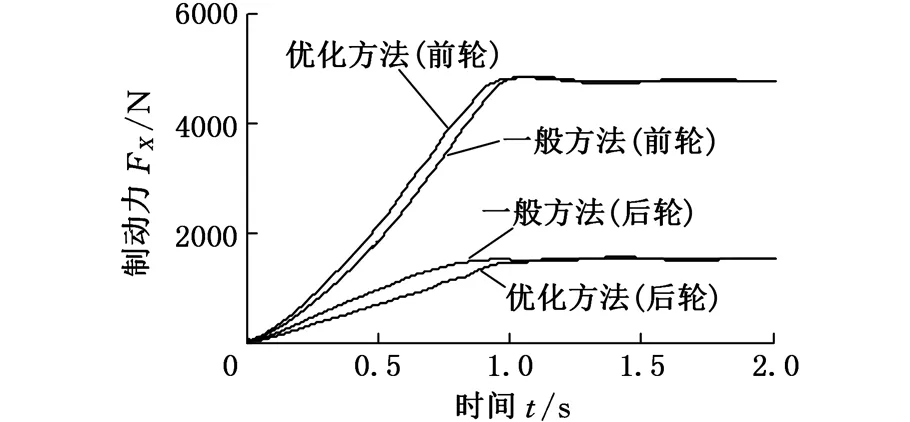
圖11 初速度v=60 km/h,zp=0.75時的地面制動力
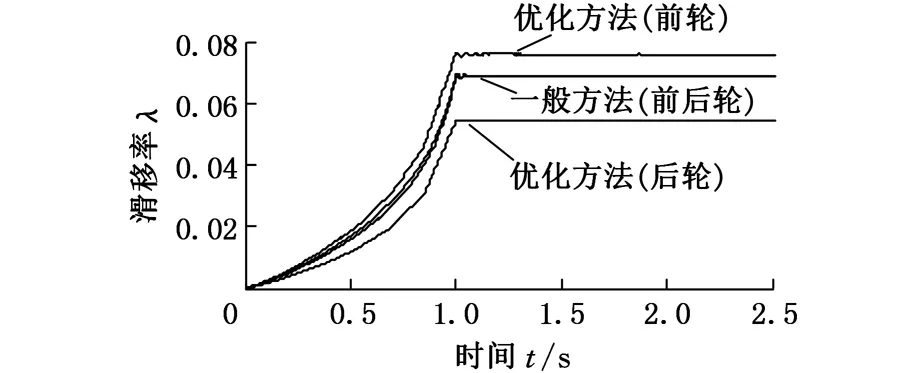
圖12 初速度v=80 km/h,zp=0.75時的車輪滑移率
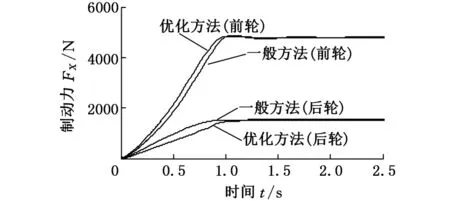
圖13 初速度v=80 km/h,zp=0.75時的地面制動力
3.2.3雪地路面仿真
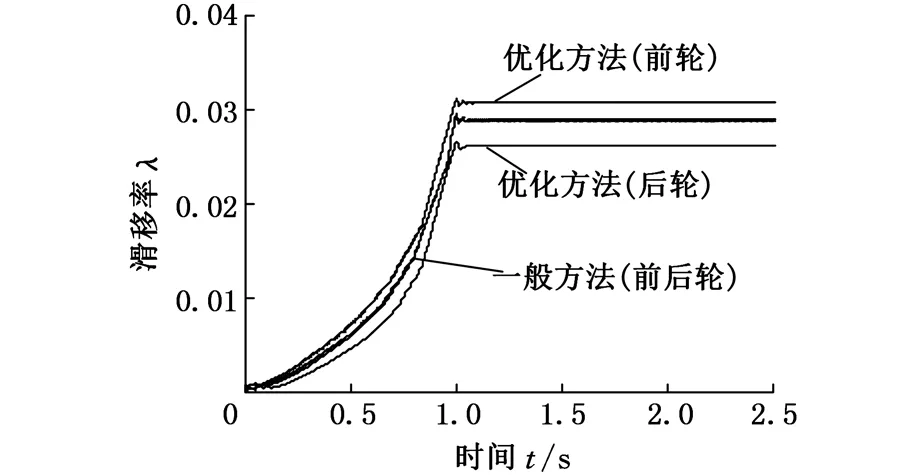
圖14 初速度v=40 km/h制動時車輪滑移率
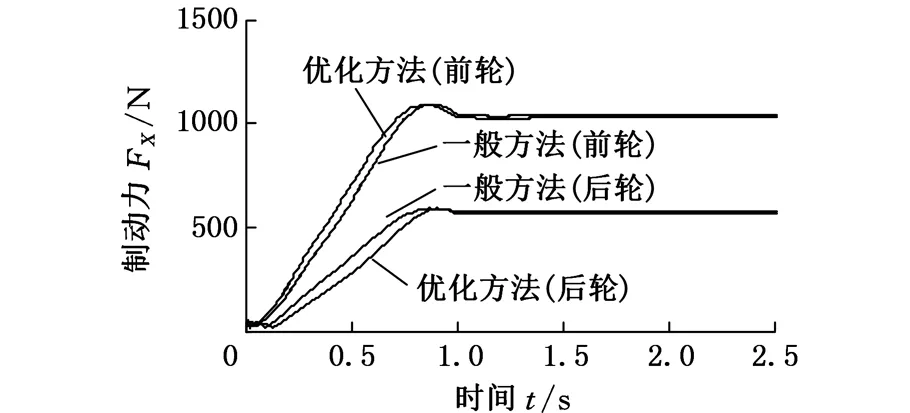
圖15 初速度v=40 km/h制動時的地面制動力
汽車以40 km/h的初速度在雪地直道路面上行駛,仿真終止速度為0。t=0時開始制動,t=1 s時制動強(qiáng)度直線上升到zp=0.18并保持不變。兩種制動力分配策略下的制動距離分別為36.15 m、36.04 m,車輪滑移率與地面制動力仿真結(jié)果如圖14、圖15所示。3.3仿真結(jié)果分析
從汽車在干瀝青、濕瀝青和雪地的仿真結(jié)果可以看出,常規(guī)制動且無車輪抱死時,在不同的直道路面、不同的初始速度以及不同的制動強(qiáng)度下制動時,采用本文提出的最優(yōu)分配策略與采用基于滑移率相等的制動力分配策略相比,后輪滑移率始終小于前輪滑移率且小于基于滑移率相等的制動力分配策略的后輪滑移率,后輪滑移率越小,其所能產(chǎn)生的橫向反作用力的值也大,有利于制動時的穩(wěn)定性。
4 實驗方案及算法實時性實驗
4.1實驗方案
本文設(shè)計的線控制動系統(tǒng)硬件在環(huán)實驗如圖16所示。dSPACE實時仿真系統(tǒng)主要用于實現(xiàn)整車模型的實時計算;主控制器和從控制器均采用飛思卡爾的MC9S12XF512單片機(jī),主控制器負(fù)責(zé)計算分配四個車輪的最優(yōu)制動力并將信息傳給相應(yīng)的從控制器;從控制器控制電子機(jī)械制動器(EMB)動作使車輪制動;主機(jī)監(jiān)視系統(tǒng)實現(xiàn)人機(jī)交互,負(fù)責(zé)實時監(jiān)視dSPACE實時仿真系統(tǒng)模型的運行狀態(tài)。
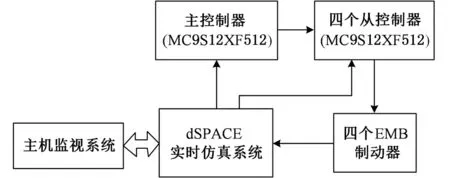
圖16 BBW硬件在環(huán)實驗結(jié)構(gòu)框圖
在原有的液壓防抱死制動系統(tǒng)(ABS)實驗臺的基礎(chǔ)上,根據(jù)設(shè)計的BBW硬件在環(huán)實驗結(jié)構(gòu)框圖,搭建了兩輪BBW硬件在環(huán)實驗臺如圖17所示。
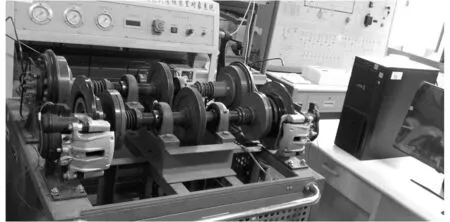
圖17 兩輪BBW硬件在環(huán)實驗臺
4.2算法實時性實驗
一般來說,ABS的控制周期為8ms時其控制效果較好[9]。為了達(dá)到較好的制動力分配效果,制動力最優(yōu)分配策略算法在主控制器中的運算周期應(yīng)小于8ms。為了驗證算法的實時性,本文采用MC9S12XF512單片機(jī)實現(xiàn)最優(yōu)制動力分配計算。采用示波器檢測數(shù)據(jù)信號輸出的時間間隔,實時計算時間間隔為7.12ms,滿足實時性要求。
5 結(jié)論
(1) 提出的制動力最優(yōu)分配策略在常規(guī)制動時既提高了汽車的制動穩(wěn)定性,又能保證獲得較短的制動距離,從而提高了車輛制動時的安全性。
(2)將制動力分配問題轉(zhuǎn)換為約束優(yōu)化問題,提出了其約束優(yōu)化問題的實時求解方法,并進(jìn)行了聯(lián)合仿真驗證。
(3)制動力最優(yōu)分配策略算法在實際的控制器中運行能滿足實時性要求,驗證了制動力最優(yōu)分配策略的可行性。
后續(xù)的研究中,將實現(xiàn)線控制動系統(tǒng)的制動力最優(yōu)分配策略的硬件在環(huán)實驗及實車測試實驗。
[1]HuX,MurgovskiN,JohannessonLM,etal.Opti-malDimensioningandPowerManagementofaFuelCell/BatteryHybridBusviaConvexProgramming[J].JournalofBusinessEthics, 2015,20(1): 457-468.
[2]LiuJun,FuYongling,WangZhanlin,etal.Develo-pmentofBrake-by-wireHardware-in-loopsimulati-onBench[C]//2012InternationalConferenceonC-omputerDistributedControlandIntelligentEngineeringApplication.Changsha, 2012:1413-1417.
[3]李道飛.基于輪胎力最優(yōu)分配的車輛動力學(xué)集成控制研究[D].上海:上海交通大學(xué), 2008.
[4]FennelH.MethodforControllingBrakeForceDist-ribution.USPatent. 6322169[P].2001-11-27.
[5]張文利.基于滑移率的ABS_EBD控制策略研究[D].長春:吉林大學(xué),2008.
[6]GoodarziA,BehmadiM,EsmailzadehE.AnOptim-isedBrakingForceDistributionStrategyforArticul-atedVehicle[J].VehicleSystemDynamics, 2008, 46(9):849-856.
[7]程斌.純電動汽車再生制動與ABS匹配控制研究[D].合肥:合肥工業(yè)大學(xué),2014.
[8]彭曉燕,章兢,陳昌榮. 基于RBF神經(jīng)網(wǎng)絡(luò)的最佳滑移率在線計算方法[J]. 機(jī)械工程學(xué)報,2011,47(14):108-113.
PengXiaoyan,ZhangJing,ChenChangrong.CalculationofRBFNeuralNetworkBasedOptimalSlipRatio[J].JournalofMechanicalEngineering, 2011,47(14):108-113.
[9]于良耀,王會義,宋健,等.汽車ABS液壓系統(tǒng)性能評價與試驗研究[C]//第四屆全國流體傳動與控制學(xué)術(shù)會議.大連,2006:39-43.
(編輯盧湘帆)
作者簡介:彭曉燕,女,1965年生。湖南大學(xué)機(jī)械與運載工程學(xué)院教授。主要研究方向為復(fù)雜系統(tǒng)計算機(jī)控制、汽車電子與控制。呂以濱,男,1989年生。湖南大學(xué)機(jī)械與運載工程學(xué)院碩士研究生。何磊,男,1991年生。湖南大學(xué)機(jī)械與運載工程學(xué)院碩士研究生。
ResearchonBrake-forceDistributionStrategiesforBrake-by-wireSystemBasedonSlipRatio
PengXiaoyanLüYibinHeLei
HunanUniversity,Changsha,410082
Toimprovebrakingsafetyandstability,anoptimalbrakingforcedistributionstrategyforbrake-by-wiresystemoffour-wheelindependentbreakbasedonslipratioandarealtimeoptimizationcalculationmethodfortheconstrainedoptimizationproblemwereproposed,andaco-simulationmodelofSimulinkandCarSimwasestablishedtosimulateandtest.Thesimulationresultsshowthattheoptimalbrakingforcedistributionstrategybasedonslipratiomayalwaysensurethefrontwheelslipratiogreaterthantherearwheels’andtherearwheelslipratioisoptimalunderdifferentbrakingconditions,whichimprovesvehiclebrakingstabilityandobtainsshorterbrakingdistance.Atlast,theoptimalbrakingforcedistributionstrategyalgorithmisverifiedanditmeetstherequirementsinreal-time.
brake-by-wiresystem;brakingforcedistribution;slipratio;co-simulation
2015-11-02
國家自然科學(xué)基金資助項目(51575167)
U461.5; U461.91
10.3969/j.issn.1004-132X.2016.17.023
劉明周,1968年生。合肥工業(yè)大學(xué)機(jī)械與汽車工程學(xué)院教授、博士研究生導(dǎo)師。主要研究方向為制造過程監(jiān)測與控制、人機(jī)工程。阿地蘭木·斯塔洪,男,1989年生。合肥工業(yè)大學(xué)機(jī)械與汽車工程學(xué)院碩士研究生。扈靜,女,1976年生。合肥工業(yè)大學(xué)機(jī)械與汽車工程學(xué)院副教授。張淼,男,1986年生。合肥工業(yè)大學(xué)機(jī)械與汽車工程學(xué)院博士研究生。錢佩倫,女,1993年生。合肥工業(yè)大學(xué)機(jī)械與汽車工程學(xué)院碩士研究生。
猜你喜歡
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
鐵道通信信號(2020年9期)2020-02-06 09:15:22
小學(xué)生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
經(jīng)濟(jì)技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
數(shù)學(xué)大世界(2018年1期)2018-04-12 05:39:14
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
